Simulátor komunikácie v poÄÃtaÄovej sieti - Softvérové Å¡túdio 2 ...
Simulátor komunikácie v poÄÃtaÄovej sieti - Softvérové Å¡túdio 2 ... Simulátor komunikácie v poÄÃtaÄovej sieti - Softvérové Å¡túdio 2 ...
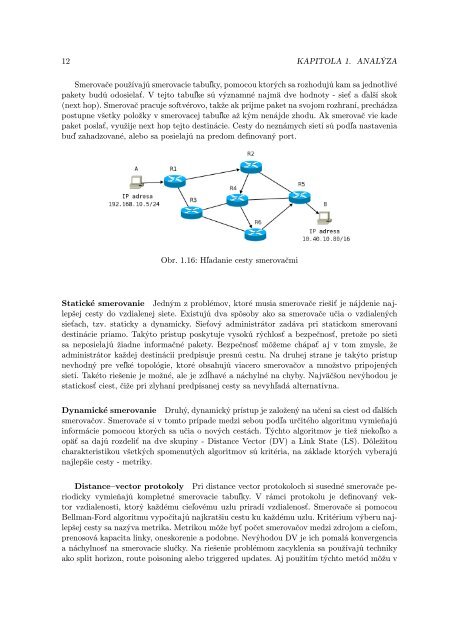
12 KAPITOLA 1. ANALÝZASmerovače používajú smerovacie tabuľky, pomocou ktorých sa rozhodujú kam sa jednotlivépakety budú odosielať. V tejto tabuľke sú významné najmä dve hodnoty - sieť a ďalší skok(next hop). Smerovač pracuje softvérovo, takže ak prijme paket na svojom rozhraní, prechádzapostupne všetky položky v smerovacej tabuľke až kým nenájde zhodu. Ak smerovač vie kadepaket poslať, využije next hop tejto destinácie. Cesty do neznámych sietí sú podľa nastaveniabuď zahadzované, alebo sa posielajú na predom definovaný port.Obr. 1.16: Hľadanie cesty smerovačmiStatické smerovanie Jedným z problémov, ktoré musia smerovače riešiť je nájdenie najlepšejcesty do vzdialenej siete. Existujú dva spôsoby ako sa smerovače učia o vzdialenýchsieťach, tzv. staticky a dynamicky. Sieťový administrátor zadáva pri statickom smerovanídestinácie priamo. Takýto prístup poskytuje vysokú rýchlosť a bezpečnosť, pretože po sietisa neposielajú žiadne informačné pakety. Bezpečnosť môžeme chápať aj v tom zmysle, žeadministrátor každej destinácii predpisuje presnú cestu. Na druhej strane je takýto prístupnevhodný pre veľké topológie, ktoré obsahujú viacero smerovačov a množstvo pripojenýchsietí. Takéto riešenie je možné, ale je zdĺhavé a náchylné na chyby. Najväčšou nevýhodou jestatickosť ciest, čiže pri zlyhaní predpísanej cesty sa nevyhľadá alternatívna.Dynamické smerovanie Druhý, dynamický prístup je založený na učení sa ciest od ďalšíchsmerovačov. Smerovače si v tomto prípade medzi sebou podľa určitého algoritmu vymieňajúinformácie pomocou ktorých sa učia o nových cestách. Týchto algoritmov je tiež niekoľko aopäť sa dajú rozdeliť na dve skupiny - Distance Vector (DV) a Link State (LS). Dôležitoucharakteristikou všetkých spomenutých algoritmov sú kritéria, na základe ktorých vyberajúnajlepšie cesty - metriky.Distance–vector protokoly Pri distance vector protokoloch si susedné smerovače periodickyvymieňajú kompletné smerovacie tabuľky. V rámci protokolu je definovaný vektorvzdialenosti, ktorý každému cieľovému uzlu priradí vzdialenosť. Smerovače si pomocouBellman-Ford algoritmu vypočítajú najkratšiu cestu ku každému uzlu. Kritérium výberu najlepšejcesty sa nazýva metrika. Metrikou môže byť počet smerovačov medzi zdrojom a cieľom,prenosová kapacita linky, oneskorenie a podobne. Nevýhodou DV je ich pomalá konvergenciaa náchylnosť na smerovacie slučky. Na riešenie problémom zacyklenia sa používajú technikyako split horizon, route poisoning alebo triggered updates. Aj použitím týchto metód môžu v
1.1. ANALÝZA PROBLEMATIKY 13určitých prípadoch v sieti vzniknúť smerovacie cykly. DV sú veľmi rozšírené a často využívanénajmä kvôli svojej jednoduchosti.Najvýznamnejšími predstaviteľmi DV sú RIP verzie 1 a 2, IGRP a EIGRP. RIP v1 (Routinginformation protocol) je najstarším DV algoritmom. Jeho metrikou je počet skokov medzismerovačmi a interval vysielania smerovacích tabuliek je 30 sekúnd. Problémom je spôsob vysielaniaaktualizácií, nakoľko používajú broadcast. RIP v2 je vylepšením pôvodného RIP v1,pričom podporuje VLSM (Variable length subnet masks), autentifikáciou a aktualizácie savysielajú multicastom. RIP je otvorený štandard a navzdory chybám je vďaka svojej jednoduchostikonfigurácie veľmi obľúbený.IGRP (Interiour gateway routing protocol) je proprietárny protokol firmy Cisco. Je topokročilejší smerovací protokol, pretože využíva kompozitnú metriku. Na výpočet najlepšíchciest nepoužíva počet skokov, ale prenosovú kapacitu linky a oneskorenie na sieti. Voliteľnemôže použiť aj ďalšie parametre.EIGRP (Enhanced IGRP) sa vyhlasuje za hybridný smerovací protokol, ale v skutočnostipredstavuje DVA. Vylepšením oproti predchádzajúcim protokolom je ich rýchlejšia konvergencia,nakoľko si udržiava aj alternatívne cesty do sietí. Za hybridný sa vyhlasuje aj z tohodôvodu, že udržiava tabuľku susedov.Dôležitosť metriky je viditeľná na obr. 1.17:Obr. 1.17: Metriky pre spoje medzi smerovačmiV tejto oblasti máme zapojených 5 smerovačov, pričom linky medzi nimi sú rýchlostí 64 a1500 kbps. Cieľom je dostať sa zo smerovača A do C. RIP používa ako metriku počet skokov(hop-count), čiže podľa neho je najvýhodnejšou cestou postupnosť A, B, C. Ako si môžemevšimnúť, cesta A, E, D, C má rýchlosti niekoľkonásobne vyššie. Všetky protokoly, ktoré majúpriepustnosť linky (bandwidth) ako jednu z metrík vyberú rýchlejšiu cestu.Link state protokoly Link state algoritmy pracujú na odlišnom princípe ako DVA.Smerovače si pri link state protokoloch nevymieňajú smerovacie tabuľky, ale informácie opripojených linkách. Každý smerovač má teda rovnaký prehľad o počítačovej sieti. PomocouDijkstrovho algorimu si následne každý smerovač vypočítava najkratšiu cestu do všetkýchsietí autonómne. Pri DVA si smerovače vymieňali už hotové smerovacie tabuľky, pri LSAsi smerovače vymieňajú informácie o stave svojich liniek a až následne si z týchto údajovvypočítavajú svoju unikátnu smerovaciu tabuľku. Výhodou tohto prístupu je vysoká rýchlosťkonvergencie a nízke zaťaženie siete. Nevýhodou je väčšia náročnosť na hardvér smerovača,nakoľko sa všetky cesty prepočítavajú po každej zmene v sieti. Riešením tohto problému
- Page 5 and 6: Zoznam obrázkov1.1 Referenčný si
- Page 7 and 8: Kapitola 0Úvod0.1 Účel a rozsah
- Page 9 and 10: 0.4. SKRATKY iiiTACACS - Terminal A
- Page 11 and 12: Kapitola 1Analýza1.1 Analýza prob
- Page 13 and 14: 1.1. ANALÝZA PROBLEMATIKY 3Obr. 1.
- Page 15 and 16: 1.1. ANALÝZA PROBLEMATIKY 5Na obr
- Page 17 and 18: 1.1. ANALÝZA PROBLEMATIKY 7do rozb
- Page 19 and 20: 1.1. ANALÝZA PROBLEMATIKY 9Obr. 1.
- Page 21: 1.1. ANALÝZA PROBLEMATIKY 11medzi
- Page 25 and 26: 1.2. ANALÝZA EXISTUJÚCICH RIEŠEN
- Page 27 and 28: 1.2. ANALÝZA EXISTUJÚCICH RIEŠEN
- Page 29 and 30: 1.3. DYNAMIPS 19dát. Simulácia te
- Page 31 and 32: 1.3. DYNAMIPS 21• Cisco 2600 Netw
- Page 33 and 34: 1.4. ZHODNOTENIE 231.3.1 Graphical
- Page 35 and 36: Kapitola 2ŠpecifikáciaV tejto kap
- Page 37 and 38: 2.2. PROCESY 27Obr. 2.3: Model prí
- Page 39 and 40: 2.3. HRÁČI 29Obr. 2.6: Model prí
- Page 41 and 42: 2.4. OPIS PRÍPADOV POUŽITIA 31Ide
- Page 43 and 44: 2.4. OPIS PRÍPADOV POUŽITIA 33Ide
- Page 45 and 46: 2.4. OPIS PRÍPADOV POUŽITIA 35Ide
- Page 47 and 48: Kapitola 3Návrh3.1 Operačný syst
- Page 49 and 50: 3.3. ROZHRANIE 39Obr. 3.2: Vytvára
- Page 51 and 52: 3.3. ROZHRANIE 41Pokiaľ nenastane
- Page 53 and 54: 3.3. ROZHRANIE 43ukončiť môže s
- Page 55 and 56: 3.4. DATABÁZA 45Obr. 3.7: Databáz
- Page 57 and 58: 3.4. DATABÁZA 47Tabuľka LabObr. 3
- Page 59 and 60: 3.4. DATABÁZA 49Obr. 3.12: Tabuľk
- Page 61 and 62: Kapitola 4PrototypCieľom prototypo
- Page 63 and 64: 4.4. WEB ROZHRANIE 53• zabezpeče
- Page 65 and 66: 4.5. IMPLEMENTÁCIA 55Obr. 4.4: Web
- Page 67 and 68: Kapitola 5ImplementáciaV predchád
- Page 69 and 70: 5.1. KONFIGURÁCIA SMEROVAČOV 59[[
- Page 71 and 72: 5.2. ŠTARTOVACIE SKRIPTY 61startup
12 KAPITOLA 1. ANALÝZASmerovače používajú smerovacie tabuľky, pomocou ktorých sa rozhodujú kam sa jednotlivépakety budú odosielať. V tejto tabuľke sú významné najmä dve hodnoty - sieť a ďalší skok(next hop). Smerovač pracuje softvérovo, takže ak prijme paket na svojom rozhraní, prechádzapostupne všetky položky v smerovacej tabuľke až kým nenájde zhodu. Ak smerovač vie kadepaket poslať, využije next hop tejto destinácie. Cesty do neznámych sietí sú podľa nastaveniabuď zahadzované, alebo sa posielajú na predom definovaný port.Obr. 1.16: Hľadanie cesty smerovačmiStatické smerovanie Jedným z problémov, ktoré musia smerovače riešiť je nájdenie najlepšejcesty do vzdialenej siete. Existujú dva spôsoby ako sa smerovače učia o vzdialenýchsieťach, tzv. staticky a dynamicky. Sieťový administrátor zadáva pri statickom smerovanídestinácie priamo. Takýto prístup poskytuje vysokú rýchlosť a bezpečnosť, pretože po <strong>sieti</strong>sa neposielajú žiadne informačné pakety. Bezpečnosť môžeme chápať aj v tom zmysle, žeadministrátor každej destinácii predpisuje presnú cestu. Na druhej strane je takýto prístupnevhodný pre veľké topológie, ktoré obsahujú viacero smerovačov a množstvo pripojenýchsietí. Takéto riešenie je možné, ale je zdĺhavé a náchylné na chyby. Najväčšou nevýhodou jestatickosť ciest, čiže pri zlyhaní predpísanej cesty sa nevyhľadá alternatívna.Dynamické smerovanie Druhý, dynamický prístup je založený na učení sa ciest od ďalšíchsmerovačov. Smerovače si v tomto prípade medzi sebou podľa určitého algoritmu vymieňajúinformácie pomocou ktorých sa učia o nových cestách. Týchto algoritmov je tiež niekoľko aopäť sa dajú rozdeliť na dve skupiny - Distance Vector (DV) a Link State (LS). Dôležitoucharakteristikou všetkých spomenutých algoritmov sú kritéria, na základe ktorých vyberajúnajlepšie cesty - metriky.Distance–vector protokoly Pri distance vector protokoloch si susedné smerovače periodickyvymieňajú kompletné smerovacie tabuľky. V rámci protokolu je definovaný vektorvzdialenosti, ktorý každému cieľovému uzlu priradí vzdialenosť. Smerovače si pomocouBellman-Ford algoritmu vypočítajú najkratšiu cestu ku každému uzlu. Kritérium výberu najlepšejcesty sa nazýva metrika. Metrikou môže byť počet smerovačov medzi zdrojom a cieľom,prenosová kapacita linky, oneskorenie a podobne. Nevýhodou DV je ich pomalá konvergenciaa náchylnosť na smerovacie slučky. Na riešenie problémom zacyklenia sa používajú technikyako split horizon, route poisoning alebo triggered updates. Aj použitím týchto metód môžu v


