

ObsÅuga i programowanie robota FANUC (Râ30iA) â Instrukcja do ...
ObsÅuga i programowanie robota FANUC (Râ30iA) â Instrukcja do ...
ObsÅuga i programowanie robota FANUC (Râ30iA) â Instrukcja do ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
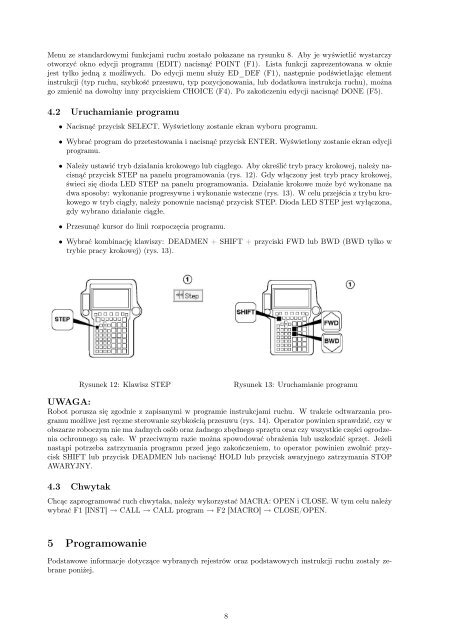
Menu ze standar<strong>do</strong>wymi funkcjami ruchu zostało pokazane na rysunku 8. Aby je wyświetlić wystarczyotworzyć okno edycji programu (EDIT) nacisnąć POINT (F1). Lista funkcji zaprezentowana w okniejest tylko jedną z możliwych. Do edycji menu służy ED_DEF (F1), następnie podświetlając elementinstrukcji (typ ruchu, szybkość przesuwu, typ pozycjonowania, lub <strong>do</strong>datkowa instrukcja ruchu), możnago zmienić na <strong>do</strong>wolny inny przyciskiem CHOICE (F4). Po zakończeniu edycji nacisnąć DONE (F5).4.2 Uruchamianie programu• Nacisnąć przycisk SELECT. Wyświetlony zostanie ekran wyboru programu.• Wybrać program <strong>do</strong> przetestowania i nacisnąć przycisk ENTER. Wyświetlony zostanie ekran edycjiprogramu.• Należy ustawić tryb działania krokowego lub ciągłego. Aby określić tryb pracy krokowej, należy nacisnąćprzycisk STEP na panelu programowania (rys. 12). Gdy włączony jest tryb pracy krokowej,świeci się dioda LED STEP na panelu programowania. Działanie krokowe może być wykonane nadwa sposoby: wykonanie progresywne i wykonanie wsteczne (rys. 13). W celu przejścia z trybu krokowegow tryb ciągły, należy ponownie nacisnąć przycisk STEP. Dioda LED STEP jest wyłączona,gdy wybrano działanie ciągłe.• Przesunąć kursor <strong>do</strong> linii rozpoczęcia programu.• Wybrać kombinację klawiszy: DEADMEN + SHIFT + przyciski FWD lub BWD (BWD tylko wtrybie pracy krokowej) (rys. 13).Rysunek 12: Klawisz STEPRysunek 13: Uruchamianie programuUWAGA:Robot porusza się zgodnie z zapisanymi w programie instrukcjami ruchu. W trakcie odtwarzania programumożliwe jest ręczne sterowanie szybkością przesuwu (rys. 14). Operator powinien sprawdzić, czy wobszarze roboczym nie ma żadnych osób oraz żadnego zbędnego sprzętu oraz czy wszystkie części ogrodzeniaochronnego są całe. W przeciwnym razie można spowo<strong>do</strong>wać obrażenia lub uszkodzić sprzęt. Jeżelinastąpi potrzeba zatrzymania programu przed jego zakończeniem, to operator powinien zwolnić przyciskSHIFT lub przycisk DEADMEN lub nacisnąć HOLD lub przycisk awaryjnego zatrzymania STOPAWARYJNY.4.3 ChwytakChcąc zaprogramować ruch chwytaka, należy wykorzystać MACRA: OPEN i CLOSE. W tym celu należywybrać F1 [INST] → CALL → CALL program → F2 [MACRO] → CLOSE/OPEN.5 ProgramowaniePodstawowe informacje <strong>do</strong>tyczące wybranych rejestrów oraz podstawowych instrukcji ruchu zostały zebraneponiżej.8













