Metode pomakÑ (2)
Metode pomakÑ (2)
Metode pomakÑ (2)

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
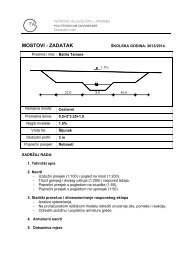
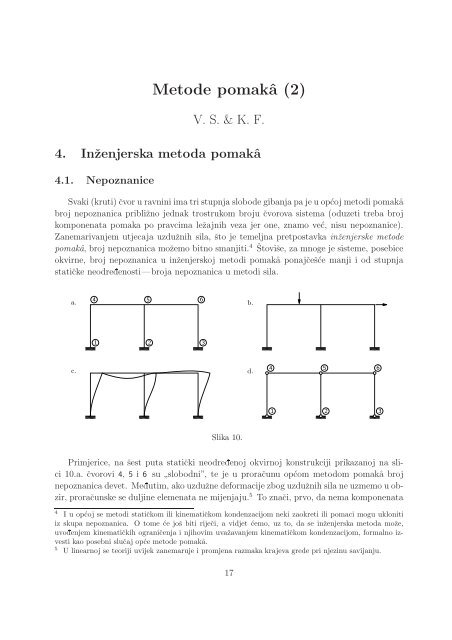
<strong>Metode</strong> pomakâ (2)V. S. & K. F.4. Inženjerska metoda pomakâ4.1. NepoznaniceSvaki (kruti) čvor u ravnini ima tri stupnja slobode gibanja pa je u općoj metodi pomakâbroj nepoznanica približno jednak trostrukom broju čvorova sistema (oduzeti treba brojkomponenata pomaka po pravcima ležajnih veza jer one, znamo već, nisu nepoznanice).Zanemarivanjem utjecaja uzdužnih sila, što je temeljna pretpostavka inženjerske metodepomakâ, broj nepoznanica možemo bitno smanjiti. 4 Štoviše, za mnoge je sisteme, posebiceokvirne, broj nepoznanica u inženjerskoj metodi pomakâ ponajčešće manji i od stupnjastatičke neodredenosti—broja nepoznanica u metodi sila.4 5 6a. b.1 2 3c.d.4 5 61 2 3Slika 10.Primjerice, na šest puta statički neodredenoj okvirnoj konstrukciji prikazanoj na slici10.a. čvorovi 4, 5 i 6 su ”slobodni”, te je u proračunu općom metodom pomakâ brojnepoznanica devet. Medutim, ako uzdužne deformacije zbog uzdužnih sila ne uzmemo u obzir,proračunske se duljine elemenata ne mijenjaju. 5 To znači, prvo, da nema komponenata4 I u općoj se metodi statičkom ili kinematičkom kondenzacijom neki zaokreti ili pomaci mogu uklonitiiz skupa nepoznanica. O tome će još biti riječi, a vidjet ćemo, uz to, da se inženjerska metoda može,uvodenjem kinematičkih ograničenja i njihovim uvažavanjem kinematičkom kondenzacijom, formalno izvestikao posebni slučaj opće metode pomakâ.5 U linearnoj se teoriji uvijek zanemaruje i promjena razmaka krajeva grede pri njezinu savijanju.17
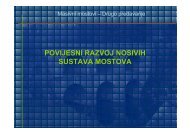
pomakâ čvorova po vertikalnim pravcima: w 4w 5w 60 i, drugo, da su vrijednostihorizontalnih komponenata njihovih pomaka medusobno jednake: u 4u 5u 6uØ4,5,6Ù,slika 10.c. Time smo broj nepoznanica sveli na četiri: kutove zaokretâ ϕ 4 , ϕ 5 , ϕ 6 slobodnihčvorova i vrijednost uØ4,5,6Ùnjihova zajedničkog translacijskog pomaka. (Slika 10.c.skica je polja pomakâ za posebni slučaj opterećenja sa slike 10.b., ali zaključak o pomacimavrijedi općenito, za bilo koje opterećenje.)U inženjerskoj su metodi pomakâ, prema tome, nepoznanice kutovi zaokretâ i vrijednostineovisnih translacijskih pomaka čvorova. Broj zaokretâ jednak je broju krutihi mješovitih kruto–zglobnih čvorova koji se mogu neovisno zaokretati, 6 ali broj neovisnihtranslacijskih pomaka nije jednak ukupnom broju slobodnih krutih, zglobnih i kruto–zglobnihčvorova. I u prikazu inženjerske metode ograničit ćemo su u početku na analizu sistemau kojima su svi čvorovi kruti, a uzet ćemo i da su sve ležajne veze krute; proračun sistemau kojima postoje zglobovi odgodit ćemo do odjeljka 4.4.Broj neovisnih translacijskih pomaka odredujemo s pomoću zglobne sheme sistema kojuoblikujemo pretvaranjem svih krutih (a, vidjet ćemo kasnije, i kruto–zglobnih) čvornih veza,uključujući i ležajne, u zglobne. Štapne elemente u shemi smatramo apsolutno krutima. Tushemu nazivamo i pridruženom rešetkom. Zglobna shema sistema sa slike 10.a. prikazanaje na slici d.Broj neovisnih translacijskih pomaka u sistemu jednak je broju stupnjeva slobode zglobnesheme. Analiza geometrijske promjenjivosti/nepromjenjivosti sistema sastavljenih odapsolutno krutih diskova i postupci odredivanja broja stupnjeva slobode obradeni su upoglavlju Kinematička analiza konstruktivnih sistema na stranicama 34.–47. udžbenikaV. Simovića Gradevna statika I. Primjenom opisanih postupaka lako je pokazati darešetka” sa slike 10.d. ima jedan stupanj slobode te se tako i formalno dokazuje da je u”sistemu prikazanom na slici a. moguć jedan (i samo jedan) neovisan translacijski pomak.Sisteme ćemo razvrstati u pomične i nepomične, ovisno o tome jesu li translacijskipomaci mogući ili ne. Jedni i drugi mogu biti potpuno ili djelomice rješivi. U proračununepomičnih sistema nepoznanice su samo kutovi zaokretâ, dok su u proračunu pomičnihnepoznanice i kutovi zaokretâ i vrijednosti neovisnih translacijskih pomaka.4.2. Nepomični sistemiKao što s pomoću zglobne sheme (slika 11.b.) možemo potvrditi, sistem sa slike 11.a.zaista je nepomičan: čvor 4 spojen je s podlogom dvama štapovima koji ne leže na istompravcu, dok je čvor 5 nekolinearnim štapovima spojen s tim nepomičnim čvorom i s podlogom.Nepoznanice su, prema tome, kutovi zaokretâ slobodnih čvorova 4 i 5: ϕ 4 i ϕ 5 . Kakoje zglobna shema statički odredena, sistem je potpuno rješiv.6I ovdje se može postaviti dodatno ograničenje: kadšto je pogodno čvorove povezati apsolutno krutimgredama; svi će tako povezani čvorovi imati jednaki zaokret.18
a.4q5Mh2b.4 51 2 3Ph2abc. d.e.M 4,5 |M 5,4||M 5,3|f.M 4,5 |M 5,4|M|M 5,3|MM 3,5M 3,5g.|m|ϕ 4,5(ϕ4| 4)| |m 5,4(ϕ 4)|h.m 4,5(ϕ 5) m 5,4(ϕ 5)|m 4,1(ϕ 4)||ϕ 4||ϕ 4||m 4,2(ϕ 4)||ϕ 4|ϕ 5 ϕ 5m 5,3(ϕ 5)ϕ 5|m 1,4(ϕ 4)||m 2,4(ϕ 4)|m 3,5(ϕ 5)|M 4,1|M 4,5M 5,4M 3,5M 5,3i.j.|M 4,2||M 1,4||M 2,4|MSlika 11.19
4Õm 4,5m 4,5Ôϕ mm 5,4m 4,5Ôϕm4,5Ôϕ 5Õ,4,5Ôϕ 5Õ,m 3,5m 3,5Ôϕ 5Õ,jÕm 5,3m 5,3Ôϕ 5Õ.U odjeljku 3.3. izveli smo izraze za vrijednosti poopćenih sila na krajevima elementaÔi,zbog poopćenih pomaka krajeva. Jedini su pomaci sada zaokreti krajeva (jednaki zaokretimamomentnih spojeva), a budući da nas zanimaju samo vrijednosti momenata nakrajevima, ostaju izraziili, matrično,Prema tome:m i,j4 k fÔi,jÕϕ i,j 2 k fÔi,jÕϕ j,i4 k fÔi,jÕϕ i 2 k fÔi,jÕϕ j ,m j,i2 k fÔi,jÕϕ i,j 4 k fÔi,jÕϕ j,i2 k fÔi,jÕϕ i 4 k fÔi,jÕϕ j ,m i,j fÔi,jÕ4 24ϕm j,ik2m 1,42 k fÔ1,4Õϕ 4 ,m 4,14 k fÔ1,4Õϕ 4 ,m 2,42 k fÔ2,4Õϕ 4 ,m 4,24 k fÔ2,4Õϕ 4 ,im 4,54 k fÔ4,5Õϕ 4 2 k fÔ4,5Õϕ 5 ,m 5,42 k fÔ4,5Õϕ 4 4 k fÔ4,5Õϕ 5 ,m 3,52 k fÔ3,5Õϕ 5 ,m 5,34 k fÔ3,5Õϕ 5 .ϕ j. (28)Te vrijednosti zasad, medutim, ne možemo iz navedenih izraza izračunati jer su nam kutoviϕ 4 i ϕ 5 u stvarnome stanju pomakâ nepoznati. Ali, sada smo zatvorili krug: budućida u izvornom sistemu u čvorovima 4 i 5 nema spojeva s podlogom, kutovi zaokreta ϕ 4i ϕ 5 moraju biti takvi da reaktivni momenti, koji se zbog njih razvijaju u momentnimspojevima osnovnog sistema, ponište reaktivne momente izazvane zadanim djelovanjem;drugim riječima, ukupni reaktivni momenti moraju iščeznuti.Ukupni reaktivni moment u zamišljenom momentnom spoju s podlogom zbroj je reaktivnihmomenata svih priključenih greda, izazvanih prisilnim zaokretom toga spoja(slike 11.g. i h.), reaktivnih momenata svih priključenih greda, izazvanih zadanim djelovanjimana te grede, i reaktivnih momenata izazvanih momentima koji su zadani u čvorovima(slika f.):M 4m 4,1 m 4,2m 4,5 M 4,5,M 5m 5,3M 5,3 m 5,4 M 5,4¡M.21
Uvjeti iščezavanja reaktivnih momenata, M 40 i M 50, daju nakon prebacivanjapoznatih vrijednosti desno od znaka jednakosti:m 4,1 m 4,2 m 4,5¡M 4,5 ,m 5,3 m 5,4M¡M 5,3¡M 5,4 .Pokazat ćemo sada da te jednadžbe izražavaju uvjete ravnoteže momenata u čvorovima4 i 5. Kad momentne spojeve u čvorovima 4 i 5 zaokrenemo za kutove ϕ 4 i ϕ 5(slike 11.g. i h.), element (1,4) djeluje na momentni spoj u čvoru 4 momentom čija je vrijednost¡m4,1 , element (2,4) momentom s vrijednošću¡m 4,2 , a element (4,5) momentoms vrijednošću¡m 4,5 ; istodobno, element (4,5) djeluje na spoj u čvoru 5 momentom čijaje vrijednost¡m 5,4 , a na taj spoj djeluje i element (3,5) momentom s vrijednošću¡m 5,3 .K tomu još na spoj u čvoru 4 element (4,5) djeluje momentom s vrijednoštu¡M 4,5 , a naspoj u čvoru 5, uz momente s vrijednostima¡M 5,3 i¡M 5,4 , od elemenata (3,5) i (4,5), neposrednodjeluje i zadani moment M s vrijednoštu M (slika 11.f.). Napokon, na te spojevedjeluju i reaktivni momenti M 4 i M 5 pa su jednadžbe ravnoteže spojeva:¡m 4,1¡m 4,2¡m 4,5¡M 4,5 M 40,¡m 5,3¡m 5,4¡M 5,3¡M 5,4 M M 50.Budući da reaktivni momenti moraju iščeznuti, čvorovi ostaju u ravnoteži i ako ih ”odvojimo”od spojeva s podlogom; jednadžbe tada postaju jednadžbama ravnoteže čvorova:¡m 4,1¡m 4,2¡m 4,5¡M 4,50,¡m 5,3¡m 5,4¡M 5,3¡M 5,4 M0.Prebacivanjem poznatih vrijednosti na desnu stranu i promjenom predznakâ dobivamoprethodno izvedene jednadžbe.Izrazimo li u tim jednadžbama vrijednosti m i,j momenata m i,j kao funkcije kutovazaokretâ, dobivamo fÔ1,4ÕfÔ1,4Õ fÔ2,4Õ sustav jednadžbi4 k 4 k 4 k fÔ4,5Õ¨ϕ 4 2 k fÔ4,5ÕϕfÔ4,5ÕfÔ2,4ÕfÔ4,5ÕfÔ3,5Õ 5¡M 4,5 ,2 k fÔ4,5Õϕ 4 4 k 4 k fÔ4,5Õ¨ϕ 5M¡M 5,3¡M 5,4 ,u kojem su nepoznanice kutovi ϕ 4 i ϕ 5 fÔ3,5Õ fÔ4,5ÕfÔ4,5Õ 5. U matričnom je zapisu naš sustav:4 k 4 k 4 k 2 k ϕ ¡M 44,52 k 4 k 4 k ϕ M¡M 5,3¡M 5,4.Uzmemo li da su EÔ1,4ÕIÔ1,4ÕEÔ2,4ÕIÔ2,4ÕEÔ3,5ÕIÔ3,5ÕEÔ4,5ÕIÔ4,5ÕEI, bit ćefÔ1,4ÕEIk 3 2EI2 4 5 , kfÔ2,4ÕEI4 , kfÔ3,5ÕEI422ik fÔ4,5ÕEI5 .
Uz uvrštavanje tih vrijednosti, vrijednostî momenata upetosti i vrijednosti momenta Msustav jednadžbi postajenjegovo je rješenje:EI13ß5 2ß52ß5 9ß5ϕϕ 4¡29,15EI4ϕ 5¡41,7141,7;i ϕ 585,20EI .I napokon, s poznatim kutovima ϕ 4 i ϕ 5 , konačne ćemo vrijednosti momenata na krajevimaizračunati kao zbrojeve vrijednosti momenata upetosti (ako postoje) i vrijednostimomenata izazvanih prisilnim zaokretima čvorova, odnosno, krajeva elemenata:M 1,4m 1,42 k fÔ1,4Õϕ 4¡2¤EI5¤29, 15EI¡11,7 kNm,M 4,1m 4,14 k fÔ1,4Õϕ 4 ,¡4¤EI5¤29, 15EI¡23,3 kNm,M 2,4m 2,42 k fÔ2,4Õϕ 4¡2¤EI4¤29, 15EI¡14,6 kNm,M 4,2m 4,24 k fÔ2,4Õϕ 4¡4¤EI4¤29, 15EI¡29,2 kNm,M 4,5m 4,5 M 4,54 k fÔ4,5Õϕ 4 2 k fÔ4,5Õϕ 5 M 4,5¡4¤EI5¤29, 15EI2¤EI5¤85, 20EI41,752,5 kNm,M 5,4m 5,4 M 5,42 k fÔ4,5Õϕ 4 4 k fÔ4,5Õϕ 5 M 5,4¡2¤EI5¤29, 15EI4¤EI5¤85, 20EI¡41,714,8 kNm,M 3,5m 3,5 M 3,52 k fÔ3,5Õϕ 5 M 3,52¤EI5¤85, 20EI50,092,6 kNm,M 5,3m 5,3 M 5,34 k fÔ3,5Õϕ 5 M 5,34¤EI5¤85, 20EI¡50,035,2 kNm.Konačni momentni dijagram na osnovnom i, ujedno, na izvornom sistemu prikazan je naslici 11.j. (str.19.), a na slici i. skicirano je stvarno stanje pomaka izvornoga sistema.[Nacrtajte dijagrame poprečnih i uzdužnih sila! Riješite zadani sistem i nacrtajte dijagrameako su q25 kNßm½, P¡100 kN, M¡75 kNm, EÔ2,4ÕIÔ2,4ÕEÔ3,5ÕIÔ3,5ÕEI,EÔ1,4ÕIÔ1,4Õ2 EI i EÔ4,5ÕIÔ4,5Õ8 EI te, kao i dosad, a3m, b5m i h4m!]23
Tablica 1. Momenti upetostiiiiiaaaaMbbPllllbbq 0q 1jjjjabM i,jP 2a¡lÕaM j,i¡P 2 bl 2l 2ablb¡lÕ2 : M i,j¡M j,iPl8bÔ3 M i,jM l 2aÔ3 M j,iM l 2abl2 : M i,jM j,iM2 24M i,jq 0b 2¡a2¡2 b3¡a3b 4¡a42 3 l 4 l0¡b3¡a3b 4¡a4M j,iq 3 l 4 l0 la0, bl: M i,j¡M j,iq 212a0, bl2 : M βq 0 li,j11 2192q 0 lM j,i¡5 2192M i,jq 1 3Õ bÕγα¡10 l β 10 l 2Ôa 2M j,iq 1 γα¡5 lα3Ôa3 2 a 2 b 3 ab 2 4 bβa2 2 ab 3 b 2γb¡a60l 21 la0, bl: M i,jq 2301 lM j,i¡q 220it gt djM i,j¡M j,i¡E I α t∆th∆tt g¡t dh — visina poprečnog presjeka24
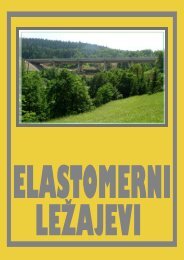
4.3. Pomični sistemiU proračunu pomičnih sistema nepoznanice su osim kutova zaokretâ i neovisni translacijskipomaci čvorova, krutih, kruto–zglobnih i zglobnih.Zglobna shema sistema sa slike 12.a. prikazana je na slici c. Riječ je o četverozglobnomokviru koji je, kao što je iz Kinematike (to jest Mehanike II.) poznato, mehanizam s jednimstupnjem slobode—u zadanu je sistemu, prema tome, moguć jedan neovisni translacijskipomak. Na slici 12.c. odredeni su i apsolutni polovi krutih diskova od kojih je zglobnashema sastavljena. Ako se disk III zarotira oko svoga apsolutnog pola ¯3, točka ¯2,¯3 putovat” ”će (u okviru teorije malih pomaka) po pravcu okomitom na spojnicu te točke i apsolutnogapola, u ovom slučaju po horizontalnom pravcu. To je vidljivo u dijagramu horizontalnihprojekcija pomakâ na istoj slici i, možda zornije, na slici d. u skici pomakâ nacrtanojneposredno na zglobnoj shemi. Taj ćemo pomak, čija je vrijednost označena sa uØ3,4Ù,odabrati kao neovisni translacijski pomak. Pomaci svih ostalih točaka sada su jednoznačnoodredeni skicom pomakâ ili dijagramima projekcija pomakâ. Na dijagramu projekcijahorizontalnih pomakâ (slika c.) vidimo da će i vrijednost projekcije pomaka točke ¯1,¯2 nahorizontalni pravac biti uØ3,4Ù(što, znamo, izriče i osnovni teorem kinematike krutogatijela). Tu smo vrijednost označili sa uØ3,4Ùjer je to vrijednost komponenata pomakatočaka ¯1,¯2 i ¯2,¯3 koje u zglobnoj shemi odgovaraju čvorovima 3 i 4 izvornog sistema. (Zaneovisni translacijski pomak mogli bismo odabrati i pomak čija je vrijednost na slici 12.d.označena sa w 3,1 . Naime, zarotiramo li disk I oko apsolutnog pola ¯1, točka ¯1,¯2 će se gibatipo pravcu okomitom na njegovu os, a to je upravo spomenuti pomak.)Osim vrijednosti odabranoga neovisnog translacijskog pomaka nepoznanice su i kutovizaokretâ ϕ 3 i ϕ 4 čvorova 3 i 4. Prema tome, osnovni sistem nastaje dodavanjem veza kojesprečavaju zaokrete čvorova i translacijski pomak (slika 12.b.).Ako su u sistemu mogući kfÔi,jÕtranslacijski pomaci, krajevi elemenata, nekih ili svih, pomicatće se po pravcima okomitima na osî elemenata (skica polja pomaka na slici 12.e.).Na momente na krajevima kfÔi,jÕkfÔi,jÕelemenata utjecat će stoga kfÔi,jÕuz zaokrete i ti poprečni translacijskipomaci krajeva. Iz matričnoga izraza (3) na stranici 9. izdvojit ćemo odgovarajućefunkcijske veze:m i,j¡6 i,j 4 klÔi,jÕw fÔi,jÕϕ i 6 j,i 2 klÔi,jÕw fÔi,jÕϕ j ,m j,i¡6 i,j 2 klÔi,jÕw fÔi,jÕϕ i 6 j,i 4 klÔi,jÕw fÔi,jÕϕ j ,koje i sada možemo sažeti u matrični zapis (uz promjenu poretka pribrojnika):ϕ im i,jϕ jm j,ik fÔi,jÕ4 2¡6ßlÔi,jÕ6ßlÔi,jÕ2 4¡6ßlÔi,jÕ6ßlÔi,jÕ 25w i,jw j,i.(29)
Pa.3 4Hb.1 2b l b dhab¯2u {3,4}u {3,4} = w 4,2d.α w 3,4w 3,1αc.¯1,¯2II¯2,¯3IIIIu {3,4}I,III|ψ I | = |ψ III |e.¯1¯3 u|ψ I | ψ IIw u{3,4}I IIw|M 4,3|f.MM 1,3M 3,1|M 3,4|M 2,4M 4,2Slika 12.26
U inženjerskoj se metodi pomakâ vrijednosti poprečnih pomaci krajeva elemenataizražavaju kao funkcije vrijednosti mogućih neovisnih translacijskih pomaka u sistemu.Predznaci vrijednosti pomaka krajeva ovisit će o izboru lokalnih koordinatnih sustava pojedinihelemenata. U indeksnoj oznaciÔi,jÕprvi indeks označava kraj elementa u kojemu je ishodištelokalnoga sustava ξζ te je os ξ orijentirana od kraja i prema kraju j. (U proračunu nepomičnihsistema, gdje su nepoznanice samo kutovi zaokretâ čvorova, na to nije trebalo obraćati pozornost,a pokazat ćemo uskoro da se uvažavanje lokalnih sustava i sada može izbjeći.)Elemente sistema sa slike 12.a. označit ćemo sa (1,3), (3,4) i (2,4). Os ξ prvoga elementaorijentirana je, dakle, od čvora 1 prema čvoru 3, drugog od 3 prema 4, a trećeg od 2 prema 4.Veze poprečnih pomaka krajeva i neovisnih pomaka nalazimo s pomoću dijagramâ projekcijapomakâ ili skice pomakâ zglobne sheme (slike 12.c. ili d.; prikaz neposredno na shemi, slika d.,za tu je zadaću obično pogodniji):w 2,40,w 4,2uØ3,4Ù;uØ3,4ÙlÔ1,3Õw 3,4tg α¤uØ3,4Ùah uØ3,4Ù, w 4,30;w 1,30, w 3,11cos α huØ3,4Ù.Momenti na krajevima elemenata zbog prisilnih pomaka krajeva sada su:m 1,3k fÔ1,3Õ°³±2ϕ 63¡61,3lÔ1,3Õw lÔ1,3Õw 3,1¸»¹k fÔ1,3Õ°³±2ϕ 63h uØ3,4Ù¸»¹,m 3,1k fÔ1,3Õ°³±4ϕ 63¡61,3lÔ1,3Õw lÔ1,3Õw 3,1¸»¹k fÔ1,3Õ°³±4ϕ 63h uØ3,4Ù¸»¹,m 3,4k fÔ3,4Õ°³±4ϕ 63 2ϕ 4¡63,4lÔ3,4Õw lÔ3,4Õw 4,3¸»¹k fÔ3,4Õ°³±4ϕ 3 2ϕ 4¡6abh uØ3,4Ù¸»¹,m 4,3k fÔ3,4Õ°³±2ϕ 63 4ϕ 4¡63,4lÔ3,4Õw lÔ3,4Õw 4,3¸»¹k fÔ3,4Õ°³±2ϕ 3 4ϕ 4¡6abh uØ3,4Ù¸»¹,m 2,4k fÔ2,4Õ°³±2ϕ 64¡62,4lÔ2,4Õw lÔ2,4Õw 4,2¸»¹k fÔ1,3Õ°³±2ϕ 63h uØ3,4Ù¸»¹,m 4,2k fÔ2,4Õ°³±4ϕ 64¡62,4lÔ2,4Õw lÔ2,4Õw 4,2¸»¹k fÔ1,3Õ°³±4ϕ 63h uØ3,4Ù¸»¹.[Izvedite izraze za momente na krajevima elemenata ako ih označimo sa (3,1), (4,3) i (4,2)! Zaoznake elemenata po vašem izboru izvedite izraze za momente na krajevima ako je sistem opisanu globalnom koordinatnom sustavu xy i ako su lokalni sustavi ξη! (Vrijednosti poprečnih pomakakrajeva označavamo tada sa v i,j i v j,i .)]Uvodenjem pojma zaokreta elementa kao krutoga tijela izrazi za momente na krajevimai postupak proračuna postaju, po našem mišljenju, preglednijima i jednostavnijima.27
Ponajprije, predznaci kutova zaokretâ elemenata ne ovise o izboru početnoga i krajnjegčvora elementa, to jest o izboru ishodišta lokalnog koordinatnog sustava. 7Lako je vidjeti da vrijednosti m i,j i m j,i ne ovise o vrijednostima w i,j i w j,i apsolutnihtranslacijskih pomaka krajeva, već samo o njihovoj razlici ∆w i,jw i,j¡w j,i :¡6 klÔi,jÕ fÔi,jÕw 6 k fÔi,jÕw j,i fÔi,jÕw i,j¡w j,ilÔi,jÕ¡6k fÔi,jÕ∆w i,jlÔi,jÕ.lÔi,jÕ¡6 kKut zaokreta elementaÔi,jÕkao krutoga tijela definiramo izrazomψÔi,jÕ∆w i,jlÔi,jÕ. (30)Kako je ∆w i,jlÔi,jÕ, riječ je o malim pomacima i malim kutovima te je ψÔi,jÕtg ψÔi,jÕ.Smisao vrtnje ne mijenja se odaberemo li za ishodište lokalnoga koordinatnog sistemaumjesto i-toga kraja kraj j (slike 13.a. i c. odnosno b. i d.).a.ijw j,iξb.w i,jijξ∆w i,jw i,jψ (i,j)ψ (i,j)|∆w i,j||ψ (i,j) ||ψ (i,j) |w j,iζl (i,j)ζc.ξ|w j,i|jψ (i,j)ψ (i,j)iζ|w i,j|∆w i,jd.ξ|w j,i|j|ψ (i,j) ||ψ (i,j) |iζ|w i,j| |∆w i,j|Slika 13.Vrijednosti momenata na krajevima elementa mogu se sada izraziti kao funkcije kutovazaokretâ krajeva i kuta zaokreta elementa kao krutoga tijela:m i,j4 k fÔi,jÕϕ i 2 k fÔi,jÕϕ j¡6 k fÔi,jÕψÔi,jÕ,m j,i2 k fÔi,jÕϕ i 4 k fÔi,jÕϕ j¡6 k fÔi,jÕψÔi,jÕ,7 Može se, štoviše, pokazati da se izrazi ne mijenjaju ni pri promjeni koordinatnoga sustava iz ξζ u ξη.[Domaća zadaća!]28
ili, u matričnom zapisu,m i,jfÔi,jÕ4 4¡6ϕ 2¡6m j,ik 2iϕψÔi,jÕ j. (31)Na slikama 14.a. i b. skicirane su progibne linije i nacrtani dijagrami momenata zbogzaokreta čvora i i zaokreta elementa kao krutoga tijela.ϕ ia.b.ψ (i,j)4 k (i,j) ϕ i2 k (i,j) ϕ im(ϕ i )6 k (i,j) ψ (i,j)6 k (i,j) ψ (i,j)m(ψ (i,j) )Slika 14.I kutovi zaokretâ elemenata kao krutih tijela funkcije su vrijednosti neovisnih translacijskihpomaka. Na dijagramima projekcija pomakâ zglobne sheme (slika 12.c.) možemoočitati:ψÔ1,3Õψ I¡uØ3,4Ùh ,ψÔ2,4Õψ ψÔ3,4Õψ III¡uØ3,4ÙIIw bh ,(dijagrami projekcija pomakâ sada su pogodniji od skice pomakâ).Vrijednosti ukupnih momenata na krajevima elemenata zbrojevi su vrijednosti momenataupetosti i vrijednosti momenata izazvanih zaokretima čvorova i zaokretima elemenata,M i,jj,imM m j,iM i,j fÔi,jÕ4 4¡6ϕ 2¡6M i,jϕ j(32)M j,ik2 M j,i,i,jpa su u našem primjeru:M 1,3m 1,3k fÔ1,3Õ 2 ϕ 3¡6 ψÔ1,3Õ¨kM 3,1m 3,1k fÔ1,3Õ 4 ϕ 3¡6 ψÔ1,3Õ¨k¡ψ I auØ3,4Ùba bhψÔi,jÕ ifÔ1,3Õ°³±2 6ϕ 3h uØ3,4Ù¸»¹,fÔ1,3Õ°³±4 6ϕ 3h uØ3,4Ù¸»¹,29
fÔ3,4Õ M 3,4m 3,4 M 3,4k 4 ϕ 3 2 ϕ 4¡6 ψÔ3,4Õ¨ uØ3,4Ù¸»¹ MÔ3,4Õk fÔ3,4Õ°³±4 aϕ 3 2 ϕ 4¡6 M 3,4 ,bhM 4,3m 4,3 fÔ3,4Õ M 4,3k 2 ϕ 3 4 ϕ 4¡6 ψÔ3,4Õ¨MÔ4,3ÕfÔ2,4Õk fÔ3,4Õ°³±2 ϕ M 4,3 ,M 2,4m 2,4k 2 ϕ 4¡6 ψÔ2,4Õ¨k h uØ3,4Ù¸»¹,M 4,2m 4,2k 4 ϕ 4¡6 ψÔ2,4Õ¨k h uØ3,4Ù¸»¹.3 4 ϕ 4¡6 abh uØ3,4Ù¸»¹fÔ2,4Õ°³±2 6ϕ 4fÔ2,4Õ°³±4 6ϕ 4Momenti na fÔ1,3Õ krajevima elemenata izraženi su sada kao funkcije nepoznanica ϕ 3 , ϕ 4 i uØ3,4Ù.Jednadžbe ravnoteže čvorova 3 i 4,¡M fÔ2,4Õ 3,1¡M 3,40 i ¡M 4,2¡M fÔ3,4Õ4,30,nakon uvrštavanja tih izraza, promjene predznaka i sredivanja postaju°³±6 4 k 4 k fÔ3,4Õ¨ϕ 3 2 k fÔ3,4Õϕ ¡6 a k4bh¸»¹uØ3,4Ù¡M 3,4°³±6 2 k fÔ3,4Õϕ 3 4 k 4 k fÔ3,4Õ¨ϕ 4bh¸»¹uØ3,4Ù¡M 4,3kkfÔ1,3ÕfÔ2,4Õhh¡6 a k fÔ3,4Õ,.Riječ je o sustavu dviju jednadžbi s tri nepoznanice pa za nalažanje jedinstvenoga rješenjanedostaje jedna jednadžba.U prethodnom smo odjeljku pokazali da su jednadžbe ravnoteže momenata u čvorovimaskriveni izraz zahtjeva za iščezavanjem reaktivnih momenata u zamišljenim momentnimspojevima s podlogom. Za tvorbu osnovnoga sistema za proračun pomičnih sistemauz momentne spojeve dodati treba i veze koje sprečavaju neovisne translacijske pomake(slika 12.b.). Treća će jednadžba proizaći stoga iz zahtjeva za iščezavanjem reaktivne sileu toj vezi, a taj se zahtjev može iskazati i kao neki uvjet ravnoteže pogodno odabranogadijela sistema.Često je, medutim, dodatnu jednadžbu (ili dodatne jednadžbe, ima li više neovisnihpomaka) lakše izvesti primjenom teorema o virtualnim pomacima u mehanici krutih tijelakoji je, znamo, tek alternativni iskaz uvjeta ravnoteže. Podsjećamo: nalaze li se materijalnatočka, kruto tijelo ili sistem krutih tijela u ravnotežnom stanju, zbroj radova aktivnih silana bilo kojim virtualnim pomacima jednak je nuli, i obratno, i za nas korisnije, akoli jeukupni rad aktivnih sila na bilo kojim virtualnim pomacima jednak nuli, tada su točka,kruto tijelo ili sistem u ravnoteži. U mehanici krutih tijela virtualnim se pomacima nazivajuzamišljeni ”dovoljno mali pomaci” omogućeni vezama u sistemu.30
Pri primjeni teorema o virtualnim pomacima raskidanjem veza geometrijski nepromjenjivisistem pretvaramo u mehanizam, a sile što su ih te veze prenosile nanosimo kaoaktivne sile koje rade na omogućenim pomacima svojih hvatišta. Jedan je mogući mehanizamzglobna shema. Na njega uz zadane sile djeluju i momenti na krajevima elemenata—umetanjemzglobova raskinuli smo veze koje prenose te momente pa ih trebakao opterećenje nanijeti na nastali mehanizam. Sistem je u ravnoteži ako (i samo ako)je ukupni rad tih momenata i zadanih uÔ1Õsila na bilo kojemu skupu virtualnih zaokreta ivirtualnih pomaka jednak nuli.Za polje virtualnih pomaka odabratψÔ1ÕÔ1,3ÕψÔ1Õćemo polje pomakâ koje nastaje uzme li se zainicijalni pomak neovisni translacijski pomak jedinične vrijednosti:Ø3,4Ù1. Tada su,prema dijagramu projekcija pomakâ sa slike 12.c. (stranica 26.):hÔ2,4ÕψÔ1Õ,III¡1h ,ψÔ1ÕÔ3,4ÕψÔ1ÕHuÔ1ÕI¡1wÔ1ÕδØ3,4Ù1,bIIaVrijednosti su virtualnih pomaka hvatištâ sila H i P po pravcima njihova djelovanja:d b dδ Pb uØ3,4Ùa bh .Ukupni je rad svih momenata i svih sila na tim virtualnim zaokretima i pomacimaM 1,3 M 3,1¨ψÔ1ÕÔ1,3ÕM 2,4 M 4,2¨ψÔ1ÕÔ2,4ÕM 3,4 M 4,3¨ψÔ1ÕÔ4,3ÕP δ P Hδ H0.fÔ1,3ÕfÔ3,4ÕUvrstimo li izvedene izraze za vrijednosti momenata na krajevima elemenata, za vrijednostivirtualnih pomaka i za kutove virtualnih zaokreta, nakon sredivanja i prebacivanja poznatihvrijednosti iza znaka jednakosti, fÔ1,3ÕfÔ2,4Õdobit ćemo fÔ2,4ÕfÔ3,4Õjednadžbu koja će, pomnožimo li je još sa¡1,glasiti°³±6 2¸»¹uØ3,4ÙfÔ3,4Õ°³±6 k ¡6 a k k ¡6 a khh°³±12 k 12 k 12 a 2 kh 2 h 2 b 2 hbh¸»¹ϕ 331bh .bh¸»¹ϕ 4abhM 3,4 M 4,3¨P a b dbhH.
Napišemo li dobiveni sustav jednadžbi u matričnom obliku,4 fÔ1,3ÕfÔ1,3ÕfÔ3,4ÕfÔ3,4ÕfÔ3,4ÕfÔ2,4ÕfÔ2,4ÕfÔ3,4ÕfÔ3,4ÕfÔ3,4ÕfÔ1,3ÕfÔ1,3ÕfÔ2,4Õ6 k ¡6 fÔ2,4ÕfÔ3,4Õa k fÔ3,4Õ k 4 k 2 kh bhϕ 6 k ¡63a k2 k 4 k 4 k ϕh bhuØ3,4Ù 46 k ¡6 a k 6 k ¡6 a k 12 k 12 k 12 a 2 kh bh h bh h 2 h 2 b 2 h 2¡M 3,4¡M 4,3aM 3,4 Mbh 4,3¨H ,P a b dbhvidjet ćemo da je matrica sustava simetrična, a može se pokazati i da je pozitivno definitna.Rješavanje sustava daje vrijednosti nepoznanica ϕ 3 , ϕ 4 i uØ3,4Ù. Uvrstimo li te vrijednostii vrijednosti momenata upetosti u izraze za ukupne vrijednosti momenata nakrajevima elemenata, dobit ćemo i vrijednosti tih momenata.Primjerice, neka su a3 m, b l3 m, b d2 m, h4 m i EI156 250 kNm 2 ; fleksijskekrutosti elemenata tada su:k fÔ1,3Õ31 250,0 kNm, k fÔ2,4Õ39 062,5 kNm, k fÔ3,4Õ31 250,0 kNm.Ako je, nadalje, P100 kN, vrijednosti su momenti upetosti (tablica 1., stranica 24.):b l bM 3,4P 2 db48,0 kNm i M 4,3¡P 2 l b d¡72,0 kNm.b 2Vrijednost sile H, H75 kN, ulazi samo u jednadžbu virtualnoga rada.Za te je vrijednosti sustav jednadžbi:250 000,00 62 500,00 18 750,00 362 500,00 281 250,00 30 468,7518 750,00 30 468,75 61 171,875ϕ ¡48,072,0101,4.Njegovo je rješenjeϕ 3¡3,569¤10¡4 ,ϕ 41,521¤10¡4b 2ϕuØ3,4Ù 4pa su konačne vrijednosti momenata na krajevima elemenata:M 1,356,97 kNm,M 3,134,67 kNm,M 3,4¡34,67 kNm,32iuØ3,4Ù0,00169 m
M 4,3¡122,86 kNm,M 2,4122,86 kNm,M 4,2110,98 kNm.Sada možemo nacrtati i konačni momentni dijagram: slika 12.f. na stranici 26.4.4. Zglobovi i statička kondenzacijaU dosadašnjem izlaganju metode pomaka ograničili smo se na sisteme u kojima su sveveze izmedu elemenata i sve vanjske veze krute. Elementi od kojih je sastavljen osnovnisistem tada su obostrano upete grede, a pomaci i zaokreti krajeva elemenata jednaki supomacima i zaokretima čvorova u koje su priključeni.Ako je elementÔi, jÕsa čvorom i spojen zglobno, i-ti kraj elementa i čvor i mogu seneovisno zaokretati (slika 15.) pa zaokret kraja neće biti jednak zaokretu čvora: ϕ i,jϕ i .iϕ iijxl e|ϕ i,j|zSlika 15.Slika 16.Ako je drugi kraj elementa krutom vezom priključen u čvor j, odgovarajući će elementosnovnoga sistema biti jednostrano upeta greda (slika 16.). Izrazi za vrijednosti momenataupetosti i za vrijednosti momenata od prisilnih pomaka ”ležajeva” na upetom kraju moguse i sada izvesti metodom sila [domaća zadaća!] ili rješavanjem diferencijalne jednadžbeprogibne linije uz odgovarajuće rubne uvjete [navedite ih!].No, za izvod se mogu iskoristiti i već poznati izrazi (32) na stranici 29. za vrijednosti momenatana krajevima obostrano upete grede. Kako ϕ i,jϕ i , u te izraze treba umjesto ϕ iuvrstiti ϕ i,j :M i,jk fÔi,jÕ 4 ϕ i,j 2 ϕ j¡6 ψÔi,jÕ¨M i,j ,M j,ik fÔi,jÕ 2 ϕ i,j 4 ϕ j¡6 ψÔi,jÕ¨M j,i .Ali kut ϕ i,j neće biti nepoznanica u sustavu jednadžbi ravnoteže—nepoznanice su samokutovi zaokretâ čvorova jer je riječ o ravnoteži čvorova—pa ga treba ukloniti iz izrazâ.Budući da je na i-tom kraju elementa zglob, znamo da je M i,j0. Iz prvoga izrazamožemo stoga ”izvući” ϕ i,j :ϕ i,j¡12 ϕ j32 ψÔi,jÕ¡M i,j4 k fÔi,jÕ.33
Uvrštavanje u drugi izraz dajeUvest ćemo oznakeM j,ik fÔi,jÕ 3 ϕ j¡3 ψÔi,jÕ¨M j,i¡12 M i,j. (33)m c j,ik fÔi,jÕ 3 ϕ j¡3 ψÔi,jÕ¨, (34)M c j,iM j,i¡12 M i,j. (35)Opisani postupak nazivamo statičkom kondenzacijom: izraze za vrijednosti momenata nakrajevima elementa saželi 8 smo primjenjujući statički uvjet—poznatu vrijednost momentana jednome kraju. [Statičkom kondenzacijom izvedite izraz za m c j,i ako su m i,j i m j,i daniizrazom (29) na stranici 25!]Uz potanji opis načina uvodenja zglobnih veza u proračun, u sljedećem, ponešto opsežnijemprimjeru osvrnut ćemo se usput na još neke proračunske pojedinosti. Na slici 17.a.prikazan je zadani sistem. [Koliko je puta statički neodreden?]Prvi je korak u rješavanju utvrdivanje nepoznanica. Započnimo s kutovima zaokretâ.Čvorovi 6, 7 i 9 upeti su ležajevi pa su njihovi zaokreti (i pomaci) poznati. Budući da suu čvor 8 oba elementa priključena zglobno, riječ je o zglobnom čvoru; kutovi zaokretâ ϕ 8,4i ϕ 8,9 priključenih krajeva elemenata su, doduše, nepoznati, ali znamo da su M 8,4M 8,90.Čvorovi 1 i 5 na krajevima su prepustâ; kutovi ϕ 1,2 i ϕ 5,4 zaokretâ tih krajeva nepoznatisu, ali su i na njima vrijednosti momenata poznate: M 1,20 i M 5,4M.Elementi (1,2) i (2,3) priključeni su u čvor 2 krutim vezama, dok je element (2,6) priključenzglobno. Prema definiciji iz odjeljka 1. taj je čvor mješoviti kruto–zglobni čvor,no vrijednosti su momenata na svim priključenim krajevima elemenata poznati: na krajuzglobno priključena elementa (2,6) mora biti M 2,60, na upetom kraju prepusta (1,2) vrijednostmomenta je M 2,1¡P 1 lÔ1,2Õ, a iz uvjeta ravnoteže momenata u čvoru neposrednoslijedi da je na kraju 2 elementa (2,3) vrijednost momenta M 2,3¡M 2,1P 1 lÔ1,2Õ. Čvor 2možemo stoga smatrati zglobnim čvorom u kojemu se sastaju samo elementi (2,6) i (2,3),pri čemu je element (2,3) na ”zglobnom” kraju opterećen koncentriranim momentom čija jevrijednost M 2,3P 1 lÔ1,2Õ. Kako bi ”novo” djelovanje bilo statički ekvivalentno ”starome”,silu P 1 treba još prenijeti u čvor 2.I u čvor 3 dva su elementa, (2,3) i (3,4), spojena krutim vezama, a jedan, (3,7), zglobno.Kako je M 3,70, znamo da mora biti M 3,2 M 3,40 odnosno M 3,2¡M 3,4 , ali namvrijednosti tih momenata nisu poznate, pa će kut zaokreta ϕ 3 biti nepoznanica; pritomsu ϕ 3,2ϕ 3,4ϕ 3 , ali je ϕ 3,7ϕ 3 .Ostaje čvor 4. U njega su sva tri elementa priključena krutim vezama; vrijednost M 4,5je, doduše, poznata, ali M 4,3 i M 4,8 nisu, te je očito riječ o krutom čvoru. Kut zaokreta ϕ 4bit će stoga druga nepoznanica. Moment M koji djeluje na slobodnom kraju prepusta (4,5)možemo prenijeti neposredno u čvor 4 i njegovu vrijednost uvesti u jednadžbu ravnotežemomenata umjesto vrijednosti M 4,5 .8 Kondenzacija je, prema Anićevu Velikom rječniku hrvatskoga jezika, zgušnjavanje, sabijanje, sažimanje.34
P 11 2 3 4M522 3 4a.P 26 7 82b.831 4 4 1 399¯4 ∞¯5 ∞c.¯1,¯4IV¯2,¯4¯2,¯5VI II III¯3,¯5¯1 ¯2 ¯3|ψ I||ψ II||ψ III|u {2,3,4}ud.35ψ VIV3,5 uIII|ψ III |3,6|ψ V | ψ VIVI6ww {4,8}e.|Pl (1,2) |Pl (1,2)M 3,2|M 3,4||M 4,3||M|M 4,8f.M 6,2 M 7,3M 9,8Mg.Slika 17.35
Primjer pokazuje da se utvrdivanje kutova zaokretâ koje treba proglasiti nepoznanicamane svodi na puko prebrojavanje krutih i kruto–zglobnih čvorova, no taj je zadatakipak razmjerno lako rješiv. Utvrdivanje neovisnih translacijskih pomaka katkad je neštosloženije. Zglobna shema zadanoga sistema prikazana je na slici 17.b. Štapovi koji odgovarajuelementima (1,2) i (4,5) nisu ucrtani—prepusti su statički odredene podkonstrukciječija su djelovanja na ostatak sistema poznata pa se u nastavku proračuna prepusti moguzamijeniti tim djelovanjima. Zglobna shema sadrži četiri čvora i šest štapova te jeSnč¤2¡nš4¤2¡62;zglobna shema, dakle, ima barem dva stupnja slobode. Svi su čvorovi samo s po jednimštapom spojeni s podlogom. Čvor 8, primjerice, može se zbog toga početi gibati po pravcuokomitom na štap (8,9). Spojimo li ga s podlogom još jednim štapom koji ne leži na pravcuštapa (8,9), postat će nepomičnim (slika 17.c.), a za dobivenu će shemu biti S4¤2¡71.Lako je vidjeti da je u toj shemi moguć jedino zajednički horizontalni pomak čvorova 2, 3i 4 pa je zaista riječ o mehanizmu s jednim stupnjem slobode. Na slici c. pronadeni suapsolutni polovi svih diskova od kojih je taj mehanizam sastavljen i nacrtan je dijagramhorizontalnih projekcija pomakâ. Vrijednost zajedničkoga pomaka čvorova označili smosa uØ2,3,4Ù. Taj je pomak jedan od neovisnih translacijskih pomaka u sistemu pa je njegovavrijednost nepoznanica u proračunu inženjerskom metodom pomakâ.Drugi neovisni pomak odredit ćemo tako da uklonimo prethodno dodani štap i novimštapom spriječimo prvi pomak—na primjer, čvor 2 možemo horizontalnim štapom spojitis podlogom. Time čvorovi 2 i 3 postaju nepomičnima. [Zašto i čvor 3?] Preostali jedio sheme mehanizam s jednim stupnjem slobode pa možemo naći polove svih diskova inacrtati dijagrame projekcija pomakâ (slika 17.d.). Za drugi neovisni translacijski pomakodabrat ćemo zajednički vertikalni pomak čvorova 4 i 8 čija je vrijednost na slici označenasa wØ4,8Ù. Ta će vrijednost biti četvrta nepoznanica u proračunu.Da zaključimo: nepoznanice su kutovi zaokreta ϕ 3 i ϕ 4 te vrijednosti neovisnih translacijskijpomaka uØ2,3,4Ùi wØ4,8Ù. Osnovni sistem za proračun inženjerskom metodom pomakaprikazan je na slici 17.e. Obje veze koje sprečavaju neovisne translacijske pomake premjestilismo u čvor 4. [Zašto to smijemo učiniti? I zašto kosi štap sa slike c. smijemo zamijenitivertikalnim?]Uvjeti ravnoteže momenata u čvorovima 3 i 4 daju dvije jednadžbe za izračunavanjevrijednosti nepoznanica:¡M 3,2¡M 3,40,M 6,2¤ψÔ1ÕMI 7,3¤ψÔ1ÕMII 4,8¤ψÔ1Õ¡M 4,3¡M M0.Druge su dvije jednadžbe jednadžbe rada na poljima virtualnih pomaka sa slika 17.c. i d.:PIII 2¤δ 20,M 3,4 M 4,3¨¤ψÔ1ÕVM 4,8¤ψÔ1ÕIIIM 9,8¤ψÔ1ÕVIP 2¤δ 20.36
ψÔ1ÕuÔ1Õ wÔ1ÕPritom smo za vrijednosti inicijalnih pomaka odabraliØ2,3,4Ù1 iØ4,8Ù1 pa su, premaslici 17.c.,IIψÔ1ÕψÔ1ÕψÔ1Õ ψÔ1ÕIII¡14 ,te, prema slici 17.d.,V¡1VI¡3iIII¡3442ψÔ1Õ16 .Sila P 2 radi na pomacima čije su vrijednostii δIII¤2¡38 .IψÔ1ÕψÔ1Õ4 , VI12¡ψÔ1ÕδIII¤212U drugome je mehanizmu zglob što odgovara čvoru 2, u koji smo premjestili silu P 1 ,nepomičan, a u prvome se pak mehanizmu odgovarajući zglob može gibati samo po horizontalnompravcu, dakle, po pravcu okomitom na pravac djelovanja te sile pa ona neradi. Moment M smo s kraja prepusta prenijeli u čvor 4. U tvorbi mehanizama čvorovise pretvaraju u zglobove koji se ne zaokreću (zaokreću se elementi priključeni u njih) te nimoment M na radi.U jednadžbama ravnoteže i jednadžbama rada vrijednosti momenata na krajevima elemenatatreba izraziti kao funkcije nepoznanica—kutova zaokretâ čvorova i vrijednostî neovisnihtranslacijskih pomaka—dodajući, postoje li, i vrijednosti momente upetosti. Prvoćemo vrijednosti momenata na krajevima izraziti kao funkcije kutova zaokretâ krajeva—koji su, kao što znamo, jednaki kutovima zaokretima krutih čvorova i krutih spojeva ukruto–zglobnim čvorovima—i kutova zaokretâ elemenata kao krutih tijela:M 3,2m c 3,2 M c 3,23 kÔ2,3Õϕ 3 M c 3,2 ,M 3,4m 3,44 kÔ3,4Õϕ 3 2 kÔ3,4Õϕ 4¡6 kÔ3,4ÕψÔ3,4Õ,M 4,3m 4,32 kÔ3,4Õϕ 3 4 kÔ3,4Õϕ 4¡6 kÔ3,4ÕψÔ3,4Õ,M 6,2m c 6,2¡3 kÔ2,6ÕψÔ2,6Õ,M 7,3m c 7,3¡3 kÔ3,7ÕψÔ3,7Õ,M 4,8m c 4,8 M c 4,83 kÔ4,8Õϕ 4¡3 kÔ4,8ÕψÔ4,8Õ M c 4,8,M 9,8m c 9,8¡3 kÔ8,9ÕψÔ8,9Õ.Kutovi zaokreta elemenata funkcije su vrijednosti translacijskih pomaka čvorova (slike17.c. i d.):V¡1ψÔ3,4Õψ 4 wØ4,8Ù,I¡1ψÔ2,6Õψ 4 uØ2,3,4Ù,37
II¡1ψÔ3,7Õψ 4 uØ2,3,4Ù,ψÔ4,8Õψ III ψ III¡1uØ2,3,4Ù¡34 16 wØ4,8Ù,wØ4,8ÙψÔ8,9Õψ VI14pa uvrštavanje u izraze za vrijednosti momenata daje:M 3,23 kÔ2,3Õϕ 3 M c 3,2 ,M 3,44 kÔ3,4Õϕ 3 2 kÔ3,4Õϕ 432 kÔ3,4ÕwØ4,8Ù,M 4,32 kÔ3,4Õϕ 3 4 kÔ3,4Õϕ 432 kÔ3,4ÕwØ4,8Ù,M 6,234 kÔ2,6ÕuØ2,3,4Ù,M 7,334 kÔ3,7ÕuØ2,3,4Ù,kÔ4,8ÕuØ2,3,4Ù kÔ4,8ÕwØ4,8Ù 39M 4,83 kÔ4,8Õϕ 4 M c 4,84 16 ,M 9,8¡34 kÔ8,9ÕwØ4,8Ù. b 1Uvrstimo li te izraze u jednadžbe ravnoteže i jednadžbe rada, nakon sredivanja dobivamosustav:au kojemu su:4,41,1 a 1,2 a 1,3 a 1,4a 2,1 a 2,2 a 2,3 a 2,4a 3,1 a 3,2 a 3,3 a 3,4a 4,1 a 4,2 a 4,3 aϕuØ2,3,4ÙwØ4,8Ù 4 ϕ 3a 1,13 kÔ2,3Õ 4 kÔ3,4Õ,a 1,2a 2,12 kÔ3,4Õ,a 1,3a 3,10,a 1,4a 4,132 kÔ3,4Õ,a 2,24 kÔ3,4Õ 3 kÔ4,8Õ,a 2,3a 3,234 kÔ4,8Õ,a 2,4a 4,232 kÔ3,4Õ 916 kÔ4,8Õ,38b 2b 3b 4
te:a 3,3316 kÔ2,6Õ 316 kÔ3,7Õ 316 kÔ4,8Õ,a 3,4a 4,3964 kÔ4,8Õ,a 4,434 kÔ3,4Õ 27256 kÔ4,8Õ 3b 1¡M c3,2 ,b 2M¡M c 4,8,b 312 P 2¡14 M c 4,8,4¡3b8 P 2¡316 M c 4,8 .16 kÔ8,9ÕUzet ćemo, jednostavnosti radi, da je EIconst na cijelom sistemu te sukÔ2,3ÕkÔ3,4ÕkÔ2,6ÕkÔ3,7ÕkÔ4,8Õk i kÔ8,9Õ45 k.Djeluje li na zglobnome kraju jednostrano upete grede moment M z , tada je vrijednostmomenta upetosti na drugom kraju M zß2 (slika 18.). Stoga je M c 3,212 P 1 lÔ1,2ÕP 1ß2.M zM zMM z2Slika 18.Vrijednost momenta upetosti M c 4,8uz pomoć tablice 1. na stranici 24.:izračunat ćemo prema izrazu (35) na stranici 34.,M4,8M c4,8¡12 M 8,4¡18 P lÔ4,8Õ¡12218 P lÔ4,8Õ¡3216 P lÔ4,8Õ¡324 P 2.Neka su P 1P 2100 kN; tada su M c 3,250 kNm i M c 4,8¡75 kNm. Neka je,nadalje, M50 kNm.39
Sustav jednadžbi sada jeNjegovo je rješenje:7 3k 2 k 0 k 22 k 7 k34 k 3316 k034 k 916 k 964 k3k 33 k 9k 1287 k2 16 64 1280ϕ 312,69k , ϕ 454,85k , ϕ 3ϕ 4uØ2,3,4ÙwØ4,8Ù uØ2,3,4Ù93,51k ¡50,0125,068,75¡23,44a konačne su vrijednosti momenata na krajevima elemenata tada:M 3,288,06 kNm,M 3,4¡88,06 kNm,M 4,3¡9,74 kNm,M 6,270,13 kNm,M 7,370,13 kNm,M 4,859,74 kNm,M 9,897,0 kNm.i.wØ4,8Ù¡161,67,kMomentni dijagram i skica polja pomaka zadanoga sistema dani su na slikama 17.f. i g. nastranici 35.[U sistemu prikazanu na slici 12.a. na stranici 26. krute veze u čvorovima 1 i 4 zamijenitezglobnima. Što su sada nepoznanice? Napišite izraze za vrijednosti momenata nakrajevima elemenata! Sastavite i riješite sustav jednadžbi ravnoteže i virtualnoga rada!Nacrtajte konačni momentni dijagram!]4.5. Prisilni pomaci ležajevaKao što znamo, prisilni pomaci ležajeva mogu u statički neodredenim sistemima izazvatipojavu unutarnjih sila i reakcija.Utjecaj zaokreta upetog ležaja lako je uključiti u proračun momentima upetosti elemenatačiji su krajevi priključeni u taj ležaj: ako je ¯ϕ i kut zadanoga zaokreta ležaja na i-tomkraju obostrano upetoga elementaÔi, jÕ, vrijednosti su momenata upetostiM i,j4 kÔi,jÕ¯ϕ i i M j,i2 kÔi,jÕ¯ϕ i ; (36)40
ako je pak element jednostrano upet (sa zglobom na kraju j), tada jeM c i,j3 kÔi,jÕ¯ϕ i . (37)Uvodenje utjecaja translacijskih pomaka u proračun često je nešto složenije. Treba,naime, uočiti da je translacijski pomak ležaja novi neovisni translacijski pomak omogućenu sistemu, te se njegov utjecaj može rasprostrijeti na dio sistema pa i na cijeli sistem. Tajutjecaj stoga odredujemo s pomoću pomakâ zglobne sheme; treba ga pritom odvojiti odutjecaja ostalih neovisnih translacijskih pomaka.Primjerice, na temelju zglobne sheme i dijagrama projekcija pomakâ prikazanih naslici 19.b. zaključujemo da je u sistemu sa slike a. moguć jedan neovisni translacijski pomak;njegovu ćemo vrijednost označiti sa uØ2,3,4Ù. U proračunu inženjerskom metodom pomakanepoznanica je i kut zaokreta ϕ 3 čvora 3. [Nacrtajte osnovni sistem!]Neka je ¯w 1 vrijednost zadanoga vertikalnog pomaka ležaja 1, slika 19.c. (To je jedinodjelovanje na sistem.) Spriječimo li neovisni pomak, zglobna shema postaje geometrijskinepromjenivom. Raskidanjem veze koja sprečava pomak po pravcu prisilnoga pomakanastaje novi mehanizam za koji možemo nacrtati dijagrame projekcija pomakâ uz inicijalnipomak jednak zadanu pomaku (slika 19.d.) te izračunati kutove zaokreta elemenata kaokrutih tijela:¯ψÔ2,3ÕψÔII¡¯wlÔ2,3Õ¡¯w 1 1i ¯ψÔ3,4ÕψÔ1 13III¯wlÔ3,4Õ¯w3 .Zaokret elementa kao krutog tijela uzrokuje pojavu momenata upetosti; ako je elementobostrano upet,M i,jM j,i¡6 kÔi,jÕ¯ψÔi,jÕ, (38)ako je pak upet jednostrano, na kraju i,U našem su primjeru prema tomeM c i,j¡3 kÔi,jÕ¯ψÔi,jÕ. (39)M c 3,2¡3 kÔ2,3Õ¯ψÔ2,3ÕkÔ2,3Õ¯w 1 ,M 3,4M 4,3¡6 kÔ3,4Õ¯ψÔ3,4Õ¡2kÔ3,4Õ¯w 1 .Ukupne su vrijednosti momenata na krajevima elemenata:M 1,32 kÔ1,3Õϕ 3¡6 kÔ1,3ÕψÔ1,3Õ2 kÔ1,3Õϕ 332 kÔ1,3ÕuØ2,3,4Ù,M 3,14 kÔ1,3Õϕ 3¡6 kÔ1,3ÕψÔ1,3Õ4 kÔ1,3Õϕ 332 kÔ1,3ÕuØ2,3,4Ù,M 3,23 kÔ2,3Õϕ 3¡3 kÔ2,3ÕψÔ2,3Õ M c 3,23 kÔ2,3Õϕ 334 kÔ2,3ÕuØ2,3,4Ù M c 3,2 ,41
a.2 3 4b.¯34ψ III13 3II¯1,¯2¯1,¯3¯2,¯3IIIu {2,3,4}c.2 3 4I¯1 ¯2|ψ I ||ψ II |1d.ˆ2bIIˆ1,ˆ3ˆ2,ˆ3b IIIˆ3¯w 1Îe.|M 3,1|M 3,2 |M 3,4| |M 4,3|Mˆ1 ∞¯w 1|ψ bII | ψ b IIIÎ|M 1,3|Slika 19.42
M 3,44 kÔ3,4Õϕ 3¡6 kÔ3,4ÕψÔ3,4Õ M 3,44 kÔ3,4Õϕ 3¡32 kÔ3,4ÕuØ2,3,4Ù M 3,4 ,M 4,32 kÔ3,4Õϕ 3¡6 kÔ3,4ÕψÔ3,4Õ M 3,42 kÔ3,4Õϕ 3¡32 kÔ3,4ÕuØ2,3,4Ù M 4,3 .Uvrstimo li te izraze i izraze za vrijednosti momenata upetosti u jednadžbu ravnotežemomenata u čvoru 3,¡M 3,1¡M 3,2¡M 3,40, ¡kÔ2,3Õ 2 kÔ3,4Õ¨¯w 1 .Uvrštavanje izrazâ u jednadžbu virtualnoga rada,M 1,3 M 3,1¨ψÔ1ÕIIM 3,4 M 4,3¨ψÔ1ÕkÔ1,3Õ kÔ2,3Õ kÔ3,4Õ¸»¹uØ2,3,4ÙIII0,kÔ2,3Õnakon sredivanja daje°³±3 3 334 16 4¡°³±1kÔ3,4Õ¸»¹¯w 1 .4Za EIconst dobivamo sustav jednadžbi47EI 1EI1 EI ¯w 15 20 3 1dobit ćemo nakon sredivanja4 kÔ1,3Õ 3 kÔ2,3Õ kÔ1,3Õ °³±34 kÔ3,4Õ¨ϕ 3ψÔ1Õ3kÔ2,3Õ¡32 4IM 3,2kÔ1,3Õ°³±3 3kÔ2,3Õ¡32 4 2 kÔ3,4Õ¸»¹ϕEIϕ 1EI 372 80uØ2,3,4Ù 3¡52 kÔ3,4Õ¸»¹uØ2,3,4Ù12 EI ¯w 1čije je rješenjeϕ 315124 ¯w 1 i uØ2,3,4Ù¡8593 ¯w 1pa su vrijednosti konačnih momenata na krajevima elemenataM 1,3¡731 EI ¯w 1,M 3,1¡1162 EI ¯w 1,M 3,2731 EI ¯w 1,M 3,4¡362 EI ¯w 1,M 4,3¡431 EI ¯w 1.43
Ako su EI150 000 kNm 2 i ¯w 11 mm, tada suϕ 31,2097¤10¡4iuØ2,3,4Ù¡9,1398¤10¡4 mteM 1,3¡33,87 kNm,M 3,1¡26,61 kNm,M 3,233,87 kNm,M 3,4¡7,26 kNm,M 4,3¡19,35 kNm.Momentni je dijagram prikazan na slici 19.e.44