Sterowanie przegubem obrotowym z wykorzystaniem sprzÄżenia
Sterowanie przegubem obrotowym z wykorzystaniem sprzÄżenia Sterowanie przegubem obrotowym z wykorzystaniem sprzÄżenia
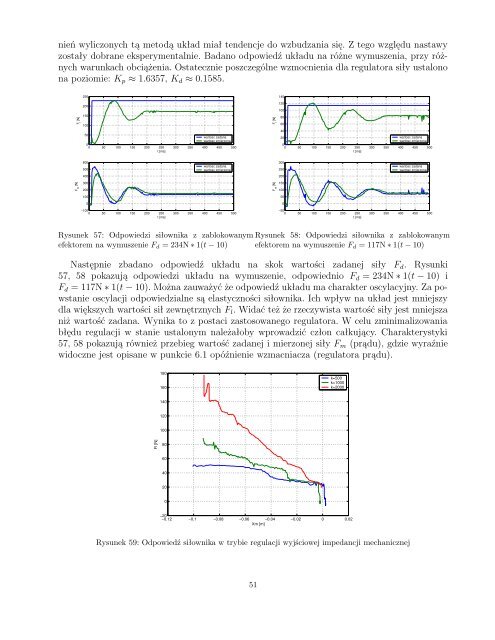
nień wyliczonych tą metodą układ miał tendencje do wzbudzania się. Z tego względu nastawyzostały dobrane eksperymentalnie. Badano odpowiedź układu na różne wymuszenia, przy różnychwarunkach obciążenia. Ostatecznie poszczególne wzmocnienia dla regulatora siły ustalonona poziomie: K p ≈ 1.6357, K d ≈ 0.1585.F l[N]25020015010050wartosc zadanawartosc zmierzona00 50 100 150 200 250 300 350 400 450 500t [ms]F l[N]14012010080604020wartosc zadanawartosc zmierzona00 50 100 150 200 250 300 350 400 450 500t [ms]600500wartosc zadanawartosc zmierzona300250wartosc zadanawartosc zmierzona400200F m[N]300200F m[N]1501001005000−1000 50 100 150 200 250 300 350 400 450 500t [ms]−500 50 100 150 200 250 300 350 400 450 500t [ms]Rysunek 57: Odpowiedzi siłownika z zablokowanymefektorem na wymuszenie F d = 234N ∗ 1(t − 10)Rysunek 58: Odpowiedzi siłownika z zablokowanymefektorem na wymuszenie F d = 117N ∗ 1(t − 10)Następnie zbadano odpowiedź układu na skok wartości zadanej siły F d . Rysunki57, 58 pokazują odpowiedzi układu na wymuszenie, odpowiednio F d = 234N ∗ 1(t − 10) iF d = 117N ∗ 1(t − 10). Można zauważyć że odpowiedź układu ma charakter oscylacyjny. Za powstanieoscylacji odpowiedzialne są elastyczności siłownika. Ich wpływ na układ jest mniejszydla większych wartości sił zewnętrznych F l . Widać też że rzeczywista wartość siły jest mniejszaniż wartość zadana. Wynika to z postaci zastosowanego regulatora. W celu zminimalizowaniabłędu regulacji w stanie ustalonym należałoby wprowadzić człon całkujący. Charakterystyki57, 58 pokazują również przebieg wartość zadanej i mierzonej siły F m (prądu), gdzie wyraźniewidoczne jest opisane w punkcie 6.1 opóźnienie wzmacniacza (regulatora prądu).180160k=500k=1000k=2000140120100Fl [N]806040200−20−0.12 −0.1 −0.08 −0.06 −0.04 −0.02 0 0.02Xm [m]Rysunek 59: Odpowiedź siłownika w trybie regulacji wyjściowej impedancji mechanicznej51
Następnie zbadano działanie siłownika w roli napędu z regulowaną wyjściową impedancjąmechaniczną. W tym celu należało przejść w tryb demo (rozkaz demo). Eksperyment polegałna zadaniu pewnej sztywności k i poruszaniu efektorem siłownika. Otrzymane wyniki pokazanesą na rysunku 59.Widać, że zależności siły F l od położenia X m , w przybliżeniu, jest liniowa. Wokolicach zerowego położenia pojawia się pewna nieliniowość. Jej obecność wynika z istnienianiezerowej strefy nieczułości silnika (opis w punkcie 6.1). Dla małych sił F l , uchyb regulacjipodawany na wzmacniacz (regulator prądu) jest niewystarczający na pokonanie oporów tarciasilnika i przekładni. Sprężyny zaczynają się sprężać, wartość pomiarowa z czujnika siły wzrasta,niestety, silnik jeszcze się nie obraca.6.3 Wyniki eksperymentówWyniki otrzymane w eksperymentach przeprowadzone na siłowniku z elastycznością szeregowązostały zebrane w tabeli 9Parametr Symbol Wymiar Wartośćjedn.Wsp. skalujący czujnik siły dla przesunięcia WS X mm110jedn.Wsp. skalujący czujnik siły dla siły WS F N4.4jedn.Wsp. skalujący czujnik położenia WS Xm m1638400jedn.Wsp. skalujący czujnik prądu WS I A620NWsp. skalujący siłę F m WS F m jedn.0.3224Strefa nieczułości siły F m Zero F m jedn. 110kgZastępcza sprężystość sprężyn k s s250002Zastępcza masa silnika m m kg 15.9kgZastępcze tarcie lepkie b m s948.1Opóźnienie T del ms 16Tabela 9: Tabela z wynikami eksperymentu7 PodsumowanieW wyniku niniejszej pracy powstał siłownik z siłowym sprzężeniem zwrotnym, który z powodzeniemmoże być zastosowany do napędzania przegubów obrotowych różnego typu robotówmanipulacyjnych i mobilnych (kroczących). Powstało również stanowisko badawcze umożliwiającebadanie tego typu napędu.Pierwszy etap prac polegał na zapoznaniu się z ideą sterowania siłowego oraz ze stosowanymirozwiązaniami w tej dziedzinie. Analizując istniejące rozwiązania zdecydowano się nakonstrukcję liniowego siłownika z elastycznością szeregową, który charakteryzuje się bardzo dobrymiparametrami ważnymi z punktu widzenia sterowania siłowego. Został zaproponowanymodel matematyczny – transmitancyjny, opisujący dynamikę siłownika. Zaproponowano równieżsposób przeniesienia napędu z liniowego na obrotowy. Była to kluczowa kwestia jeżelichodzi o zastosowanie siłownika w roli napędu dla przegubów obrotowych robotów.Następny etap prac polegał na zaprojektowaniu i wykonaniu konstrukcji mechanicznej i elektronicznejrobota. Zdecydowano się na zastosowanie silnika bezkomutatorowego prądu stałego(BLDC), ponieważ przy niewielkich wymiarach i małej masie oferuje dużą moc oraz moment52
- Page 4 and 5: Spis treści1 Wstęp 51.1 Cel i zak
- Page 6 and 7: 44 Widok stanowiska badawczego (1)
- Page 8 and 9: 1 WstępWiększość komercyjnych a
- Page 10 and 11: Znając działająca siłę, moment
- Page 12 and 13: 2.3 Model matematycznyRysunek 3 pok
- Page 14 and 15: Rysunek 4: Model części energetyc
- Page 16 and 17: Równanie swobodnie poruszającej s
- Page 18 and 19: 14. Czujnik siły.15. Podstawa.16.
- Page 20 and 21: Rysunek 15: Widok czujnika siłyRys
- Page 22 and 23: Widok silnika przedstawiony jest na
- Page 24 and 25: Rysunek 22: Płytka sterownika - st
- Page 26 and 27: cechuje się dużą szybkością dz
- Page 28 and 29: • układ czuwający COP (ang. Com
- Page 30 and 31: Złącze Z6 umożliwia połączenie
- Page 32 and 33: 14000 obr , dlatego częstotliwoś
- Page 34 and 35: 3.2.3 ZasilaczDo zasilania całośc
- Page 36 and 37: • narzędzie zarządzające budow
- Page 38 and 39: Rysunek 38: Diagram głównej pętl
- Page 40 and 41: o rozmiarze maksymalnie 250 punktó
- Page 42 and 43: ENMASKbit 15-11 10 9 8 7 - 6 5 4 3
- Page 44 and 45: • K p — wzmocnienie części pr
- Page 46 and 47: 5 Interfejs użytkownika - dostępn
- Page 48 and 49: 3. Naciśnij ENTER.4. Czekaj na nap
- Page 50 and 51: 40009003500800Odczyt z czujnika3000
- Page 52 and 53: pokonanie których potrzebny jest p
- Page 56 and 57: napędowy. Ze względu na to że ni
- Page 58 and 59: DodatekRysunek 60: Rysunek złożen
- Page 60 and 61: Rysunek 62: Tylnia ściana efektora
- Page 62 and 63: Rysunek 65: Przednia ściana siłow
- Page 64 and 65: Rysunek 69: Główna prowadnica si
nień wyliczonych tą metodą układ miał tendencje do wzbudzania się. Z tego względu nastawyzostały dobrane eksperymentalnie. Badano odpowiedź układu na różne wymuszenia, przy różnychwarunkach obciążenia. Ostatecznie poszczególne wzmocnienia dla regulatora siły ustalonona poziomie: K p ≈ 1.6357, K d ≈ 0.1585.F l[N]25020015010050wartosc zadanawartosc zmierzona00 50 100 150 200 250 300 350 400 450 500t [ms]F l[N]14012010080604020wartosc zadanawartosc zmierzona00 50 100 150 200 250 300 350 400 450 500t [ms]600500wartosc zadanawartosc zmierzona300250wartosc zadanawartosc zmierzona400200F m[N]300200F m[N]1501001005000−1000 50 100 150 200 250 300 350 400 450 500t [ms]−500 50 100 150 200 250 300 350 400 450 500t [ms]Rysunek 57: Odpowiedzi siłownika z zablokowanymefektorem na wymuszenie F d = 234N ∗ 1(t − 10)Rysunek 58: Odpowiedzi siłownika z zablokowanymefektorem na wymuszenie F d = 117N ∗ 1(t − 10)Następnie zbadano odpowiedź układu na skok wartości zadanej siły F d . Rysunki57, 58 pokazują odpowiedzi układu na wymuszenie, odpowiednio F d = 234N ∗ 1(t − 10) iF d = 117N ∗ 1(t − 10). Można zauważyć że odpowiedź układu ma charakter oscylacyjny. Za powstanieoscylacji odpowiedzialne są elastyczności siłownika. Ich wpływ na układ jest mniejszydla większych wartości sił zewnętrznych F l . Widać też że rzeczywista wartość siły jest mniejszaniż wartość zadana. Wynika to z postaci zastosowanego regulatora. W celu zminimalizowaniabłędu regulacji w stanie ustalonym należałoby wprowadzić człon całkujący. Charakterystyki57, 58 pokazują również przebieg wartość zadanej i mierzonej siły F m (prądu), gdzie wyraźniewidoczne jest opisane w punkcie 6.1 opóźnienie wzmacniacza (regulatora prądu).180160k=500k=1000k=2000140120100Fl [N]806040200−20−0.12 −0.1 −0.08 −0.06 −0.04 −0.02 0 0.02Xm [m]Rysunek 59: Odpowiedź siłownika w trybie regulacji wyjściowej impedancji mechanicznej51


