1577_W14_Uklady,prze..
1577_W14_Uklady,prze..
1577_W14_Uklady,prze..
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
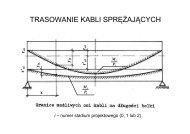
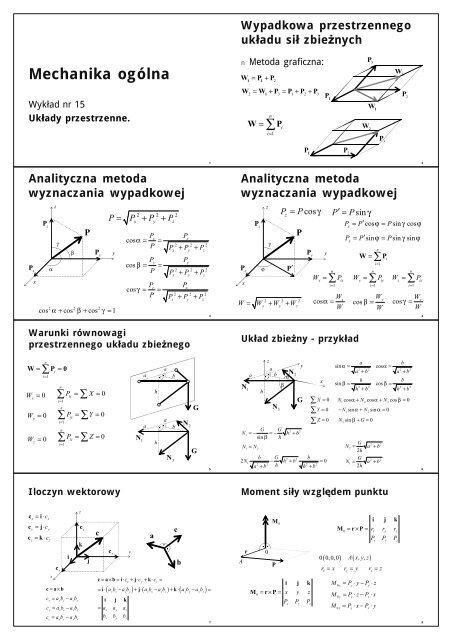
Moment siły względempunktur 0M 0Pi j kM = r× P = r r r0 x y z0A( x0, y0,z0)A( xyz , , )i j kM = r× P = x−x y− y z−z0 0 0 0P P Px y zr x xx= −0ryy y0P P Px y z= − rz= z−z0( ) ( )( ) ( )( ) ( )M = P ⋅ y− y −P ⋅ z−z0x z 0 y 0M = P ⋅ z−z −P ⋅ x−x0y x 0 z 0M = P ⋅ x−x −P ⋅ y−y0z y 0 x0Moment wypadkowejwzględem punktunW = ∑Pii= 1n n n∑ ∑ ∑M = r× W = r× P = r× P = M0 i i i0i= 1 i= 1 i=1• Moment wypadkowej układu siłwzględem punktu równy jest sumiemomentów od sił składowych tegoukładu względem tego punktu.910Moment siły względem osiMoment siły względem osiπzr ⊥′rr′PP′M ′ ′z= r× P = r × PM = P′⋅r ⊥′• Moment siły względem osi równy jestmomentowi rzutu siły na płaszczyznęprostopadłą do osi względem punktu, wktórym oś <strong>prze</strong>bija płaszczyznę.z• Moment siły względem osi jest równyjest równy 0, gdy:–Rzut P′ na płaszczyznę π prostopadłą doosi z jest równy 0 (siła równoległa do osi);–Długość ramienia r ⊥′ jest równa 0 (liniadziałania siły <strong>prze</strong>cina oś).• Moment siły względem osi równy jestrzutowi na oś momentu siły względemdowolnego punktu leżącego na osi.1112Moment siły względem osiukładu współrzędnychMoment siły względem osiukładu współrzędnychzzP zP zP zPPP yP yP xP xzP xyyyxP yMz =−Px ⋅ y+ Py⋅xxMy=−Pz ⋅ x+ Px⋅zxP xx1314Moment siły względem osiukładu współrzędnychDowolny <strong>prze</strong>strzennyukład siłxxzzP xP zyP zPP yyP yMx =−Py ⋅ z+ Pz⋅y• Dowolny <strong>prze</strong>strzenny układ sił możnazastąpić siłą wypadkową przyłożonądo dowolnego bieguna redukcji 0 iparą sił o momencie równym sumiemomentów od sił składowychwzględem tego bieguna redukcji.nW = ∑PiMi= 1n=∑M0 i0i= 1-wektor główny-moment główny1516
Dowolny <strong>prze</strong>strzennyukład siłRedukcja do początkuukładu współrzędnychWWxWyzn= ∑ Pixi=1n= ∑ Piyi=1n= ∑ Pizi=1Wcosα = xWW ycos β =WWzcosγ =Wn∑W = W + W + W2 2 2x y zn∑( ( ) ( ))M = M = P ⋅ y − y −P ⋅ z −z0x ix iz i 0 iy i 0i= 1 i=1WWxWyzn= ∑ Pixi=1n= ∑ Piyi=1n= ∑ Pizi=1Wcosα = xWW ycos β =WWzcosγ =Wn∑W = W + W + Wn∑( )M = M = P ⋅y −P ⋅z0x ix iz i iy ii= 1 i=12 2 2x y zn∑n∑( ( ) ( ))M = M = P ⋅ z −z −P ⋅ x −x0y iy ix i 0 iz i 0i= 1 i=1n∑n∑( ( ) ( ))M = M = P ⋅ x − x −P ⋅ y − y0z iz iy i 0 ix i 0i= 1 i=117n∑n∑( )M = M = P ⋅z −P ⋅x0y iy ix i iz ii= 1 i=1n∑n∑( )M = M = P ⋅x −P ⋅ y0z iz iy i ix ii= 1 i=118Warunki równowagi dowolnego<strong>prze</strong>strzennego układu siłUkłady prętowennW = ∑Pi= 00 ∑ i0i= 1i= 1n∑W = 0 P = X = 0 M = 0 0i=1n∑i=1n∑i=1ixiy∑∑P = Y = 0P = Z = 0iz∑M = M = 0n∑i=1n∑i=1n∑i=1MMMixiyiz∑= M = 0∑= M = 0∑= M = 0xyz• Kratownice <strong>prze</strong>strzenne• Ruszty–O węzłach <strong>prze</strong>gubowych–O węzłach sztywnych• Ramy <strong>prze</strong>strzenne–Na siatce prostopadłościanu–Z prętami ukośnymi• Pręty zakrzywione w <strong>prze</strong>strzeni• Układy prętów różnego typu1920PodporyPodporyM xRxR zM zRyM y• Sztywnezamocowanie – 6reakcji (3 siły, 3momenty)R xR zR zR yR zRyR zRy• Podpora<strong>prze</strong>gubowa<strong>prze</strong>suwnawzdłuż prostej –2 reakcje (2 siły)RxR zRyRxRxRyR zRy• Podpora<strong>prze</strong>gubowanie<strong>prze</strong>suwna – 3reakcje (3 siły)R xR yR z• Podpora<strong>prze</strong>gubowa<strong>prze</strong>suwna popłaszczyźnie– 1reakcja (1 siła)R z2122Przeguby• Przegub Cardana (możliwe zginanie,brak możliwości skręcania –wzajemnego obrotu prętów względemosi)• Przegub walcowy (możliwe tylkozginanie w jednym kierunku)• Przegub kulisty (całkowita swobodawzajemnego obrotu )Siły wewnętrzne• Wypadkowa siła i wypadkowy momentwzajemnego oddziaływania• Wypadkowa siła:–Siła normalna (osiowa)–Dwie składowe siły tnącej (po<strong>prze</strong>cznej)• Wypadkowy moment:–Moment skręcający–Dwie składowe momentu zginającego2324
Siły wewnętrznePrzykład – ruszt owęzłach <strong>prze</strong>gubowychyzxWMT zT yM yNMWM xM zMxNW = Wx + Wy + WzM = Mx + My + MzT zM yT yMzM= MW = N xW = TyzyW = Tx szg xzy=y=yM M MM = M = Mzg xyz z zz25AB5 kN mD10kNF2m 2m 2mGEC20kNm2m2m26Przykład – ruszt owęzłach <strong>prze</strong>gubowychBelka B-D-GD5 kN mGEC2m5 kN mDG2m10kNm-10kN+BRD10kNFRE2mBR D2mM α-10kNT αARDRE2m 2m 2m20kNm27∑∑R BkN 1MB= RD⋅2m−5 ⋅4m⋅ 2m=0m 2kNY = RB+ RD−5 ⋅ 4m=0mRDRB= 20kN= 0kN28Belka C-E-FBelka C-E-F10kN∑FM = R ⋅2m−10kN⋅ 4m=0CEER EC2mR C2m20kNm∑ Y = R E+ R C− 10 kN = 0RB= 0kNM α-RE= 20kN-10kN10kN+T αM AAR A140kNmRD= 20kNR = 20kN2m 2m 2m-+∑∑Y = R + R − R = 0D E AEM = M + R ⋅ 2m+ R ⋅ 4m+ 20kNm= 060kNm40kNA A D E-+20kN20kNm-RAMA20kNm20kNm= 40kN=−140kNmM αT αRB∑Sprawdzenie reakcjiMAARA=−140kNm= 40kN= 0kN5 kN mD10kNGRCEZ = RA + RB + RC−10kN −5kN⋅ 4m = 40kN + 0kN −10kN −10kN − 20kN= 0m∑ Mx=−M A−20kNm−RA⋅6m−RB ⋅ 4m+ 5kN⋅4m⋅4m−RC⋅ 2m+ 10kN⋅ 2m=m= 140kNm−20kNm−40kN ⋅6m−0kN ⋅ 4m+ 5kN⋅4m⋅ 4m+ 10kN⋅ 2m+ 10kN⋅ 2m=0m2 5kN4 2 4 40 2 5kN∑M = yR ⋅ Am − m m RCm kN m 4m 2m 10kN 4m0m⋅ ⋅ + ⋅ = ⋅ − m⋅ ⋅ − ⋅ =C=−10kNBFyx2m 2m 2mz20kNm2m2m2931Przykład – rama<strong>prze</strong>strzenna2m3m15kNm4m5 kN mMAyRAyx10kNzR AxM AxR AzM Azy∑∑∑X = R + 10kN= 0∑∑AxY = R Ay= 0Z = RAz−5kN⋅ 3m= 0m∑RAx=−10kNR = 0Mx= MAx− 15kNm+ 5kN⋅3m⋅ 4m= 0mMAx=−15kNm1M 5 3 3 10 2 0y= M kNAy− ⋅ m⋅ m+ kN⋅ m =m 2M = M = 0zAzMAyAyRAz= 2,5kNmM = 0Az= 15kN3032
Siły normalne i tnąceMomentyskręcający i zginająceN α15kN-15kN+15kN-15kN-10kN+m α22,5kNm15kNm22,5kNm45kNm45kNm15kNT α10kNM α2,5kNm45kNm3334