Translatorni mehaniÄki sistemi
Translatorni mehaniÄki sistemi
Translatorni mehaniÄki sistemi

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2008.01.09.<br />
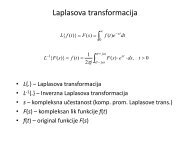
<strong>Translatorni</strong> mehanički <strong>sistemi</strong><br />
Modeli fizičkih sistema<br />
Modeliranje i simulacija sistema<br />
Promenljive<br />
Osnovne promenljive:<br />
• x – rastojanje [m]<br />
• v – brzina [m/s]<br />
• a – ubrzanje [m /s2]<br />
• f – sila [N]<br />
Sve su funkcije<br />
vremena<br />
dx<br />
v <br />
dt<br />
2<br />
dv d x<br />
a <br />
2<br />
dt dt<br />
Dodatne promenljive:<br />
• w – energija [J]<br />
• p – snaga [W]<br />
p f v<br />
x<br />
m<br />
x<br />
m<br />
v<br />
m<br />
p <br />
dw<br />
dt<br />
t1<br />
w( t)<br />
p(<br />
t)<br />
dt w(<br />
t0)<br />
v<br />
f<br />
m<br />
m<br />
f<br />
t o<br />
1
2008.01.09.<br />
Elementi i njihovi zakoni<br />
Posmatramo elemente i pojave:<br />
• Masa<br />
• Trenje<br />
• Elastičnost<br />
• Masa tela M [kg]<br />
• II Njutonov zakon:<br />
d<br />
dt<br />
Masa tela<br />
dv<br />
( M v)<br />
f za M=const M f<br />
dt<br />
• Energija<br />
– Kinetička<br />
– Potencijalna<br />
w k<br />
<br />
1 v 2<br />
2<br />
M <br />
w p<br />
Mgh<br />
2
2008.01.09.<br />
Trenje<br />
• Sila trenja se javlja kada se dva tela dodiruju i<br />
kredu različitim brzinama<br />
f f ( v)<br />
v<br />
v 2<br />
v<br />
<br />
1<br />
• Linearizovana zavisnost: f cv<br />
c – koeficijent trenja (viskoznosti) [Nm/s]<br />
• direktno je srazmeren površi dodira, a<br />
obrnuto srazmeren debljini uljanog filma.<br />
zanemarujemo<br />
trenje<br />
c 0<br />
česta oznaka:<br />
c<br />
c<br />
v 2<br />
m<br />
v 1<br />
v 2<br />
m<br />
v 1<br />
• Karakteristika<br />
trenja<br />
linearno<br />
f<br />
suvo<br />
f<br />
povlačenje<br />
f<br />
A<br />
v<br />
-A<br />
v<br />
v<br />
• Opruga<br />
Elastičnost<br />
– Pod dejstvom spoljašnje sile f opruga se isteže za x<br />
• d o - istegnutost opruge bez dejstva sile<br />
• Sila u opruzi:<br />
f f ( x)<br />
x<br />
x 2<br />
x 1<br />
d o +x<br />
x<br />
f<br />
• Za mala istezanja važi<br />
(linearizovano ponašanje)<br />
f k x<br />
k - koeficijent elastičnosti [N/m]<br />
f<br />
x 1<br />
d o +x 1 +x 2<br />
x 2<br />
f<br />
• Energija opruge:<br />
w p<br />
<br />
1 ) 2<br />
2<br />
k( x<br />
3
2008.01.09.<br />
Zakonitosti kod uzajamnog dejstva elemenata<br />
1. Dalamberov zakon (drugačuja formulacija II Njutnovog zakona)<br />
dv<br />
dv<br />
( fext<br />
)<br />
i<br />
M ( fext<br />
)<br />
i<br />
M 0 <br />
dt<br />
dt<br />
i<br />
i<br />
2. Zakon akcije i reakcije (III Njutnov zakon)<br />
i<br />
inercijalna sila<br />
D`Alambert-ova sila<br />
f i<br />
0<br />
k<br />
<br />
f k f k<br />
f k<br />
v 2<br />
m<br />
v 1<br />
3. Zakon pomeraja: suma pomeraja duž zatvorene putanje je 0<br />
m<br />
0 xi<br />
<br />
x 1 x 2<br />
B 1 B 2<br />
M 1<br />
<br />
x1 ( x2<br />
x1<br />
) <br />
<br />
<br />
x2<br />
<br />
pomeraj pomeraj pomeraj<br />
B1<br />
B2 k<br />
k<br />
<br />
i<br />
0<br />
Dobijanje modela sistema – primer 1<br />
• Kombinuju se zakonitosti elemenata i<br />
zakonitosti interakcije (međusobnih<br />
veza) elemenata<br />
x 1<br />
x 2<br />
c M<br />
M 2<br />
1<br />
k 1 k 2<br />
f a (t)<br />
– Za svako telo posmatramo sile<br />
koje na njega deluju<br />
– Na osnovu Dalamberovog zakona<br />
pišemo jednačine<br />
k x 1 1<br />
M 1<br />
c( x 2<br />
x<br />
1)<br />
M1x<br />
<br />
k<br />
1<br />
2( x2<br />
x1)<br />
c( x 2<br />
x<br />
1)<br />
M<br />
k2( x2<br />
x<br />
2 f<br />
1)<br />
a<br />
M 2x <br />
2<br />
c(<br />
x<br />
2<br />
x<br />
) k ( x<br />
1<br />
f ( t)<br />
c(<br />
x<br />
a<br />
2<br />
2<br />
x ) M x k x<br />
x<br />
) k ( x<br />
1<br />
2<br />
1<br />
2<br />
2<br />
1 1<br />
x ) M x<br />
1<br />
1 1<br />
2<br />
0<br />
2<br />
0<br />
M x cx<br />
( k k ) x cx<br />
1 1<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
2<br />
2<br />
cx<br />
k x M x cx<br />
k x f ( t)<br />
1<br />
2<br />
2<br />
k x 0<br />
2<br />
2<br />
2<br />
2<br />
a<br />
4
2008.01.09.<br />
Primer 2<br />
c 1<br />
k 2<br />
x(t)<br />
z(t)<br />
M 2 f a (t)<br />
c 2<br />
k<br />
k2(<br />
x z)<br />
M2<br />
1<br />
c<br />
M<br />
2<br />
z<br />
1<br />
M ( x<br />
<br />
)<br />
c 3<br />
2<br />
z<br />
c x<br />
1<br />
c<br />
3 x<br />
M x<br />
1 <br />
M 1<br />
f a<br />
c2z<br />
k 1<br />
x<br />
Primer 3<br />
k 1<br />
k 2<br />
x 2<br />
B/2<br />
M 2<br />
k 3<br />
B/2<br />
f a (t)<br />
M 1<br />
x 1<br />
M 1<br />
1<br />
M1x<br />
k x 1 1<br />
k 2<br />
x2<br />
k<br />
2<br />
2x 2<br />
k 3x M ( <br />
2<br />
x<br />
1<br />
x<br />
2)<br />
M 2<br />
k3x 2<br />
g M 2<br />
f a<br />
B x<br />
k 3<br />
x 2 2<br />
M 1<br />
g<br />
5
2008.01.09.<br />
Primer 4<br />
x 1<br />
k 1<br />
B 2<br />
f(t)<br />
M 1<br />
M 2<br />
M 2<br />
2<br />
B 1 x 2<br />
k 2<br />
f (t)<br />
B1x<br />
1<br />
M k x )<br />
1<br />
x 1<br />
M 1<br />
1( 1<br />
x2<br />
M 2x 2<br />
k1( x1<br />
x2)<br />
M 2<br />
g k 2<br />
x B 2<br />
x<br />
2<br />
6