Przegląd Mechaniczny 12/2014
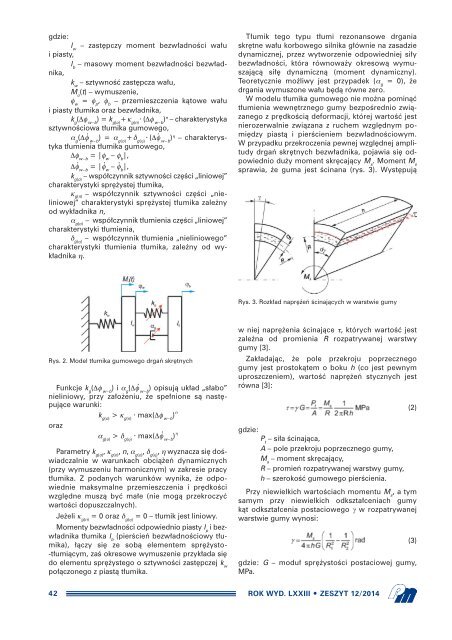
gdzie: I w – zast´pczy moment bezw∏adnoÊci wa∏u i piasty, I b – masowy moment bezw∏adnoÊci bezw∏adnika, k w – sztywnoÊç zast´pcza wa∏u, M o (t) – wymuszenie, φ w = φ p , φ b – przemieszczenia kàtowe wa∏u i piasty t∏umika oraz bezw∏adnika, k g (∆φ w–b ) = k g(o) +κ g(n)·(∆φ w–b ) n – charakterystyka sztywnoÊciowa t∏umika gumowego, . . α g (∆φ w–b ) = α g(o) +δ g(η) ·(∆φ w –b ) η – charakterystyka t∏umienia t∏umika gumowego, ∆φ w–b = |φ w – φ b |, . . . ∆φ w–b = |φ w – φ b |, k g(o) – wspó∏czynnik sztywnoÊci cz´Êci „liniowej” charakterystyki spr´˝ystej t∏umika, κ g(n) – wspó∏czynnik sztywnoÊci cz´Êci „nieliniowej” charakterystyki spr´˝ystej t∏umika zale˝ny od wyk∏adnika n, α g(o) – wspó∏czynnik t∏umienia cz´Êci „liniowej” charakterystyki t∏umienia, δ g(η) – wspó∏czynnik t∏umienia „nieliniowego” charakterystyki t∏umienia t∏umika, zale˝ny od wyk∏adnika η. T∏umik tego typu t∏umi rezonansowe drgania skr´tne wa∏u korbowego silnika g∏ównie na zasadzie dynamicznej, przez wytworzenie odpowiedniej si∏y bezw∏adnoÊci, która równowa˝y okresowà wymuszajàcà si∏´ dynamicznà (moment dynamiczny). Teoretycznie mo˝liwy jest przypadek (α g = 0), ˝e drgania wymuszone wa∏u b´dà równe zero. W modelu t∏umika gumowego nie mo˝na pominàç t∏umienia wewn´trznego gumy bezpoÊrednio zwiàzanego z pr´dkoÊcià deformacji, której wartoÊç jest nierozerwalnie zwiàzana z ruchem wzgl´dnym pomi´dzy piastà i pierÊcieniem bezw∏adnoÊciowym. W przypadku przekroczenia pewnej wzgl´dnej amplitudy drgaƒ skr´tnych bezw∏adnika, pojawia si´ odpowiednio du˝y moment skr´cajàcy M s . Moment M s sprawia, ˝e guma jest Êcinana (rys. 3). Wyst´pujà Rys. 3. Rozk∏ad napr´˝eƒ Êcinajàcych w warstwie gumy Rys. 2. Model t∏umika gumowego drgaƒ skr´tnych . Funkcje k g (∆φ w–b ) i α g (∆φ w–b ) opisujà uk∏ad „s∏abo” nieliniowy, przy za∏o˝eniu, ˝e spe∏nione sà nast´pujàce warunki: k g(o) > κ g(n) · max(∆φ w–b ) n oraz . α g(o) > δ g(η) · max(∆φ w–b ) η Parametry k g(o) , κ g(n) , n, α g(o) , δ g(η) , η wyznacza si´ doÊwiadczalnie w warunkach obcià˝eƒ dynamicznych (przy wymuszeniu harmonicznym) w zakresie pracy t∏umika. Z podanych warunków wynika, ˝e odpowiednie maksymalne przemieszczenia i pr´dkoÊci wzgl´dne muszà byç ma∏e (nie mogà przekroczyç wartoÊci dopuszczalnych). Je˝eli κ g(n) = 0 oraz δ g(η) = 0 – t∏umik jest liniowy. Momenty bezw∏adnoÊci odpowiednio piasty I p i bezw∏adnika t∏umika I b (pierÊcieƒ bezw∏adnoÊciowy t∏umika), ∏àczy si´ ze sobà elementem spr´˝ysto- -t∏umiàcym, zaÊ okresowe wymuszenie przyk∏ada si´ do elementu spr´˝ystego o sztywnoÊci zast´pczej k w po∏àczonego z piastà t∏umika. w niej napr´˝enia Êcinajàce τ, których wartoÊç jest zale˝na od promienia R rozpatrywanej warstwy gumy [3]. Zak∏adajàc, ˝e pole przekroju poprzecznego gumy jest prostokàtem o boku h (co jest pewnym uproszczeniem), wartoÊç napr´˝eƒ stycznych jest równa [3]: gdzie: P t – si∏a Êcinajàca, A – pole przekroju poprzecznego gumy, M s – moment skr´cajàcy, R – promieƒ rozpatrywanej warstwy gumy, h – szerokoÊç gumowego pierÊcienia. Przy niewielkich wartoÊciach momentu M s , a tym samym przy niewielkich odkszta∏ceniach gumy kàt odkszta∏cenia postaciowego γ w rozpatrywanej warstwie gumy wynosi: gdzie: G – modu∏ spr´˝ystoÊci postaciowej gumy, MPa. (2) (3) 42 ROK WYD. LXXIII ZESZYT 12/2014
W przyj´tym modelu, wartoÊci I p , α g , k g sà funkcjami parametrów geometrycznych t∏umika oraz w∏asnoÊci fizycznych elementu spr´˝ysto-t∏umiàcego. Przy wyprowadzaniu wspó∏czynników α g i k g przyjmuje si´, ˝e pod wp∏ywem dzia∏ania momentu M s , w materiale gumy panuje stan czystego Êcinania, a napr´˝enia styczne sà sta∏e na ca∏ej szerokoÊci gumowego pierÊcienia. Teoretycznie kszta∏t przekroju poprzecznego gumy (rys. 6) mo˝e byç dowolny, przy czym stosunek szerokoÊci h tego przekroju do promienia R = d g /2, winien byç mo˝liwie sta∏y: 2h ≈ const. Rys. 4. Gumowy t∏umik drgaƒ skr´tnych – parametry geometryczne d g By spe∏niç ten warunek, na etapie projektowania profili t∏umika (piasty i pierÊcienia bezw∏adnoÊciowego) powinno si´ pami´taç o warunku: τ = const ⇔ R 2 h = const (5) Poniewa˝ warunek ten jest trudny do realizacji, proces wulkanizacji gumy umo˝liwiajàcy po∏àczenia elementów t∏umika zastàpiono procesem wt∏aczania Rys. 5. Masowe momenty bezw∏adnoÊci pierÊcienia bezw∏adnoÊciowego gumowego t∏umika drgaƒ skr´tnych WartoÊci masowych momentów bezw∏adnoÊci cz´Êci t∏umika (np. pierÊcienia I p przy za∏o˝eniu prostokàtnego przekroju poprzecznego pierÊcienia bezw∏adnoÊciowego) mo˝na wyznaczyç w stosunkowo prosty sposób z zale˝noÊci: l p = 2πbr p3 g b ρ (4) gdzie: b – szerokoÊç pierÊcienia bezw∏adnoÊciowego, r p – Êredni promieƒ pierÊcienia, g b – gruboÊç pierÊcienia bezw∏adnoÊciowego, ρ – masa w∏aÊciwa materia∏u pierÊcienia bezw∏adnoÊciowego, czy te˝ z wykorzystaniem programów CAD (rys. 5). Natomiast w celu okreÊlenia wspó∏czynników α g , k g konieczne jest przyj´cie odpowiedniego modelu reologicznego. Rys. 6. PierÊcieƒ gumowy gumy – gumowy pierÊcieƒ wciskany jest w szczelin´ pomi´dzy piastà a pierÊcieniem bezw∏adnoÊciowym t∏umika. ROK WYD. LXXIII ZESZYT 12/2014 43
- Page 1 and 2: Cena 24 z∏ (w tym 5% VAT) PL ISSN
- Page 3 and 4: ROK WYD. LXXIII PRZEGLÑD MECHANICZ
- Page 5 and 6: PROBLEMY • NOWOÂCI • INFORMACJ
- Page 7 and 8: PROBLEMY • NOWOÂCI • INFORMACJ
- Page 9 and 10: PROBLEMY • NOWOÂCI • INFORMACJ
- Page 11 and 12: PROBLEMY • NOWOÂCI • INFORMACJ
- Page 13 and 14: PROBLEMY • NOWOÂCI • INFORMACJ
- Page 15 and 16: PROBLEMY • NOWOÂCI • INFORMACJ
- Page 17 and 18: PROBLEMY • NOWOÂCI • INFORMACJ
- Page 19 and 20: PROBLEMY • NOWOÂCI • INFORMACJ
- Page 21 and 22: PROBLEMY • NOWOÂCI • INFORMACJ
- Page 23 and 24: PROBLEMY • NOWOÂCI • INFORMACJ
- Page 25 and 26: WARUNKI PRENUMERATY „Przeglàdu M
- Page 27 and 28: Dostrajanie wirtualnego modelu wrze
- Page 29 and 30: kontroli nad sztywnoÊcià poprzecz
- Page 31 and 32: Wp∏yw rodzaju obcià˝enia na sta
- Page 33 and 34: Wyniki badaƒ rejestrowano przy u˝
- Page 35 and 36: Obcià˝enia nieproporcjonalne - ba
- Page 37 and 38: pracoch∏onnoÊç produkcji i u∏
- Page 39 and 40: Porównujàc zale˝noÊci na pr´dk
- Page 41 and 42: jazdu ∏atwy demonta˝ na modu∏y
- Page 43: Ma∏owymiarowe gumowe t∏umiki dr
- Page 47 and 48: Wzrost temperatury pracy t∏umika
- Page 49 and 50: Badania wp∏ywu ciep∏a na stan e
- Page 51 and 52: atury lub innych) podawane sà prze
- Page 53 and 54: ków pomiarów kàta zwil˝ania dij
- Page 55 and 56: PRZEGLÑD MECHANICZNY miesi´cznik
- Page 57 and 58: Dorociak Robert in˝., Nadowski Rys
- Page 59 and 60: Cichy i szybki w monta˝u system pr
- Page 61: Zakoƒczy∏ si´ trzeci mi´dzynar
gdzie:<br />
I w<br />
– zast´pczy moment bezw∏adnoÊci wa∏u<br />
i piasty,<br />
I b<br />
– masowy moment bezw∏adnoÊci bezw∏adnika,<br />
k w<br />
– sztywnoÊç zast´pcza wa∏u,<br />
M o<br />
(t) – wymuszenie,<br />
φ w<br />
= φ p<br />
, φ b<br />
– przemieszczenia kàtowe wa∏u<br />
i piasty t∏umika oraz bezw∏adnika,<br />
k g<br />
(∆φ w–b<br />
) = k g(o)<br />
+κ g(n)·(∆φ w–b<br />
) n – charakterystyka<br />
sztywnoÊciowa t∏umika gumowego,<br />
. .<br />
α g<br />
(∆φ w–b<br />
) = α g(o)<br />
+δ g(η) ·(∆φ w –b<br />
) η – charakterystyka<br />
t∏umienia t∏umika gumowego,<br />
∆φ w–b<br />
= |φ w<br />
– φ b<br />
|,<br />
. . .<br />
∆φ w–b<br />
= |φ w<br />
– φ b<br />
|,<br />
k g(o)<br />
– wspó∏czynnik sztywnoÊci cz´Êci „liniowej”<br />
charakterystyki spr´˝ystej t∏umika,<br />
κ g(n)<br />
– wspó∏czynnik sztywnoÊci cz´Êci „nieliniowej”<br />
charakterystyki spr´˝ystej t∏umika zale˝ny<br />
od wyk∏adnika n,<br />
α g(o)<br />
– wspó∏czynnik t∏umienia cz´Êci „liniowej”<br />
charakterystyki t∏umienia,<br />
δ g(η)<br />
– wspó∏czynnik t∏umienia „nieliniowego”<br />
charakterystyki t∏umienia t∏umika, zale˝ny od wyk∏adnika<br />
η.<br />
T∏umik tego typu t∏umi rezonansowe drgania<br />
skr´tne wa∏u korbowego silnika g∏ównie na zasadzie<br />
dynamicznej, przez wytworzenie odpowiedniej si∏y<br />
bezw∏adnoÊci, która równowa˝y okresowà wymuszajàcà<br />
si∏´ dynamicznà (moment dynamiczny).<br />
Teoretycznie mo˝liwy jest przypadek (α g<br />
= 0), ˝e<br />
drgania wymuszone wa∏u b´dà równe zero.<br />
W modelu t∏umika gumowego nie mo˝na pominàç<br />
t∏umienia wewn´trznego gumy bezpoÊrednio zwiàzanego<br />
z pr´dkoÊcià deformacji, której wartoÊç jest<br />
nierozerwalnie zwiàzana z ruchem wzgl´dnym pomi´dzy<br />
piastà i pierÊcieniem bezw∏adnoÊciowym.<br />
W przypadku przekroczenia pewnej wzgl´dnej amplitudy<br />
drgaƒ skr´tnych bezw∏adnika, pojawia si´ odpowiednio<br />
du˝y moment skr´cajàcy M s<br />
. Moment M s<br />
sprawia, ˝e guma jest Êcinana (rys. 3). Wyst´pujà<br />
Rys. 3. Rozk∏ad napr´˝eƒ Êcinajàcych w warstwie gumy<br />
Rys. 2. Model t∏umika gumowego drgaƒ skr´tnych<br />
.<br />
Funkcje k g<br />
(∆φ w–b<br />
) i α g<br />
(∆φ w–b<br />
) opisujà uk∏ad „s∏abo”<br />
nieliniowy, przy za∏o˝eniu, ˝e spe∏nione sà nast´pujàce<br />
warunki:<br />
k g(o)<br />
> κ g(n)<br />
· max(∆φ w–b<br />
) n<br />
oraz<br />
.<br />
α g(o)<br />
> δ g(η)<br />
· max(∆φ w–b<br />
) η<br />
Parametry k g(o)<br />
, κ g(n)<br />
, n, α g(o)<br />
, δ g(η)<br />
, η wyznacza si´ doÊwiadczalnie<br />
w warunkach obcià˝eƒ dynamicznych<br />
(przy wymuszeniu harmonicznym) w zakresie pracy<br />
t∏umika. Z podanych warunków wynika, ˝e odpowiednie<br />
maksymalne przemieszczenia i pr´dkoÊci<br />
wzgl´dne muszà byç ma∏e (nie mogà przekroczyç<br />
wartoÊci dopuszczalnych).<br />
Je˝eli κ g(n)<br />
= 0 oraz δ g(η)<br />
= 0 – t∏umik jest liniowy.<br />
Momenty bezw∏adnoÊci odpowiednio piasty I p<br />
i bezw∏adnika<br />
t∏umika I b<br />
(pierÊcieƒ bezw∏adnoÊciowy t∏umika),<br />
∏àczy si´ ze sobà elementem spr´˝ysto-<br />
-t∏umiàcym, zaÊ okresowe wymuszenie przyk∏ada si´<br />
do elementu spr´˝ystego o sztywnoÊci zast´pczej k w<br />
po∏àczonego z piastà t∏umika.<br />
w niej napr´˝enia Êcinajàce τ, których wartoÊç jest<br />
zale˝na od promienia R rozpatrywanej warstwy<br />
gumy [3].<br />
Zak∏adajàc, ˝e pole przekroju poprzecznego<br />
gumy jest prostokàtem o boku h (co jest pewnym<br />
uproszczeniem), wartoÊç napr´˝eƒ stycznych jest<br />
równa [3]:<br />
gdzie:<br />
P t<br />
– si∏a Êcinajàca,<br />
A – pole przekroju poprzecznego gumy,<br />
M s<br />
– moment skr´cajàcy,<br />
R – promieƒ rozpatrywanej warstwy gumy,<br />
h – szerokoÊç gumowego pierÊcienia.<br />
Przy niewielkich wartoÊciach momentu M s<br />
, a tym<br />
samym przy niewielkich odkszta∏ceniach gumy<br />
kàt odkszta∏cenia postaciowego γ w rozpatrywanej<br />
warstwie gumy wynosi:<br />
gdzie: G – modu∏ spr´˝ystoÊci postaciowej gumy,<br />
MPa.<br />
(2)<br />
(3)<br />
42 ROK WYD. LXXIII ZESZYT <strong>12</strong>/<strong>2014</strong>


