Mehatronski sistemi_motorji - lrtme - Univerza v Ljubljani
Mehatronski sistemi_motorji - lrtme - Univerza v Ljubljani
Mehatronski sistemi_motorji - lrtme - Univerza v Ljubljani

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
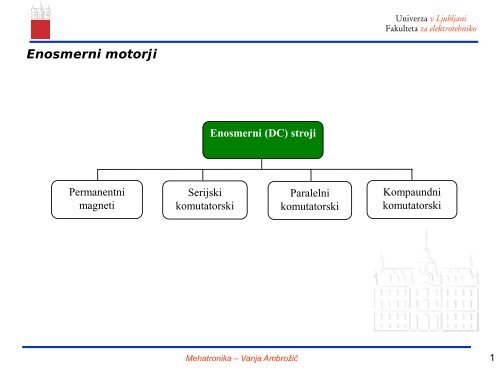
Enosmerni <strong>motorji</strong><br />
Enosmerni (DC) stroji<br />
Permanentni<br />
magneti<br />
Serijski<br />
komutatorski<br />
Paralelni<br />
komutatorski<br />
Kompaundni<br />
komutatorski<br />
Mehatronika – Vanja Ambrožič<br />
1
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Izmenični <strong>motorji</strong><br />
Izmenični<br />
(AC) stroji<br />
Enofazni<br />
Polifazni<br />
Sinhronski<br />
Asinhronski<br />
Sinhronski<br />
Asinhronski<br />
- Cilindrični rotor<br />
- Z zasenčenimi poli S kratkostično kletko<br />
- Izraženi poli<br />
- Histerezni<br />
- Permanentni magneti<br />
- Reluktančni<br />
- S permanentimi magneti Z navitim rotorjem<br />
- Kratkostična kletka<br />
- Deljene faze<br />
- Zagonski kond.<br />
- Zasenčeni poli<br />
- Trajni kond.<br />
- Repulzijski<br />
- Repulz. zagon<br />
- Repulz. indukcijski<br />
- Naviti rotor<br />
Mehatronika – Vanja Ambrožič<br />
2
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Značilne navorne karakteristike bremen<br />
M br<br />
[Nm]<br />
M br = k<br />
P br = M br ω = k ω<br />
ω [rad/s]<br />
Delovni stroji, ki opravljajo dela dviganja, trenja ali preoblikovanja: dvigala, vozila<br />
z majhno hitrostjo, obdelovalni stroji, transportni trakovi, industrijski pogoni z valji.<br />
Mehatronika – Vanja Ambrožič<br />
3
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Značilne navorne karakteristike bremen<br />
M br<br />
[Nm]<br />
M br = k ω 2<br />
P br = M br ω = k ω 3<br />
ω [rad/s]<br />
Zračni ali tekočinski upor: ventilatorji, centrifugalne črpalke, mešalniki, ladijski<br />
vijaki.<br />
Mehatronika – Vanja Ambrožič<br />
4
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Značilne navorne karakteristike bremen<br />
M br<br />
[Nm]<br />
M br = k ω 2 + M 0<br />
P br = M br ω = k ω 3 + M 0 ω<br />
M 0<br />
ω [rad/s]<br />
Trenje + zračni upor: tirna vozila, cestna vozila, transportne naprave.<br />
Mehatronika – Vanja Ambrožič<br />
5
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Značilne navorne karakteristike bremen<br />
M br<br />
[Nm]<br />
M br = k/ω<br />
P br = M br ω = k<br />
v=k 1 ,<br />
F=k 2<br />
M = Fr = Fv/ω = k 2 k 1 /ω = k/ω<br />
Navijalni stroji: navijanje papirja, tekstila, pločevine.<br />
ω [rad/s]<br />
Mehatronika – Vanja Ambrožič<br />
6
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Značilne navorne karakteristike električnih motorjev<br />
M el<br />
[Nm]<br />
Karakteristike veljajo za stacionarno<br />
stanje ter ob konstantni (amplitudi)<br />
napetosti ter konstantni frekvenci<br />
(pri izmeničnih strojih)<br />
Sinhronska karakteristika: sinhronski stroji.<br />
ω [rad/s]<br />
Mehatronika – Vanja Ambrožič<br />
7
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Značilne navorne karakteristike električnih motorjev<br />
M el<br />
[Nm]<br />
ω [rad/s]<br />
Trda karakteristika: asinhronski stroji, komutatorski stroji z vzporednim vzbujanjem<br />
Mehatronika – Vanja Ambrožič<br />
8
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Značilne navorne karakteristike električnih motorjev<br />
M el<br />
[Nm]<br />
ω [rad/s]<br />
Mehka karakteristika: komutatorski stroji z zaporednim vzbujanjem<br />
Mehatronika – Vanja Ambrožič<br />
9
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Dinamično stanje (ω = var. → α ≠ 0, Md ≠ 0)<br />
M<br />
el<br />
=<br />
M<br />
br<br />
+<br />
M<br />
d<br />
dω<br />
J<br />
dt<br />
⎛<br />
⎜<br />
⎝<br />
M d<br />
2<br />
dω d ε ⎞<br />
= Jα = J = J<br />
⎟<br />
2<br />
dt dt ⎠<br />
Stacionarno stanje (ω = const. → α = 0, Md = 0)<br />
M = M<br />
el br<br />
Mehatronika – Vanja Ambrožič<br />
10
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
M<br />
[Nm]<br />
Mel = Mbr<br />
stacionarno stanje<br />
Mbr<br />
Mel<br />
ω [rad/s]<br />
Mehatronika – Vanja Ambrožič<br />
11
Sila na aktivni vodnik v magnetnem polju<br />
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
<br />
( <br />
) F = l × B i<br />
Mehatronika – Vanja Ambrožič<br />
12
Komutatorski <strong>motorji</strong><br />
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
<br />
M<br />
el<br />
= 2⋅<br />
= 2<br />
<br />
( r × F ) = 2⋅( r × ( l × B)<br />
i<br />
) = 2⋅( l ( r ⋅ B)<br />
−B( r ⋅l<br />
))<br />
<br />
⎛ Φ ⎞ ⎛ Φ ⎞ <br />
( l ( rB cosθ<br />
)) i = 2l<br />
l⎜r<br />
⎟i<br />
cosθ<br />
= 2l<br />
l⎜r<br />
⎟i<br />
cosυ<br />
= l Φi<br />
cosθ.<br />
en<br />
⎝<br />
A ⎠<br />
en<br />
⎜<br />
⎝<br />
i =<br />
<br />
0<br />
2rl<br />
⎟<br />
⎠<br />
en<br />
υ<br />
l<br />
r<br />
Mehatronika – Vanja Ambrožič<br />
13
Komutatorski <strong>motorji</strong><br />
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Mehatronika – Vanja Ambrožič<br />
14
Komutatorski <strong>motorji</strong><br />
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
M el M el M el<br />
Mehatronika – Vanja Ambrožič<br />
15
Enosmerni komutatorski <strong>motorji</strong><br />
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
R a<br />
L a<br />
i a<br />
u a ψ<br />
S N vz<br />
e<br />
EM<br />
di<br />
a<br />
ua= Ri<br />
a a+ La<br />
+ e<br />
e=<br />
kψ ω<br />
e<br />
vz<br />
M = k ψ i<br />
el M vz a<br />
dt<br />
dω J = Mel<br />
− M<br />
dt<br />
br<br />
Mehatronika – Vanja Ambrožič<br />
16
Enosmerni komutatorski <strong>motorji</strong><br />
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
=<br />
+<br />
1<br />
k<br />
T -1<br />
1<br />
i a<br />
+<br />
1<br />
J -1 1<br />
c M<br />
M br<br />
u a T a<br />
M el Jα<br />
+<br />
_<br />
k<br />
T<br />
R a<br />
-1<br />
dy ( t)<br />
T + yt = kxt ⋅<br />
dt<br />
x<br />
( ) ( )<br />
y'<br />
y<br />
α ω ε<br />
e<br />
c e<br />
Mehatronika – Vanja Ambrožič<br />
17
Enosmerni komutatorski <strong>motorji</strong> - regulacija<br />
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
ω *<br />
+ _<br />
regulator<br />
momenta<br />
M el<br />
*<br />
REGULACIJSKO<br />
VEZJE<br />
i a<br />
*<br />
regulator<br />
+ _ toka +<br />
_<br />
regulator<br />
napetosti<br />
u a<br />
*<br />
MOČNOSTNI<br />
VEZJI<br />
usmernik/<br />
presmernik<br />
MOTOR<br />
e<br />
_ M br<br />
_<br />
u a<br />
+<br />
i a M el dinamika α, ω, ε<br />
i a = f(u a )<br />
pogona<br />
u vz ψ vz<br />
M el = f(ψ vz , i a )<br />
filter<br />
k e,M<br />
ω<br />
ψ vz * = f(ω)<br />
+<br />
_<br />
regulator<br />
fluksa<br />
u vz<br />
*<br />
usmernik/<br />
presmernik<br />
ψ vz , i vz =<br />
f(u vz )<br />
ω<br />
Mehatronika – Vanja Ambrožič<br />
18
Koračni <strong>motorji</strong><br />
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
-Trajni magnet na rotorju<br />
-Navitja (lahko različno število, npr. 3) na<br />
statorju<br />
-Navitja napajamo z bipolarnimi<br />
enosmernimi napetostmi (pošiljamo tokove)<br />
Mehatronika – Vanja Ambrožič<br />
19
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Koračni <strong>motorji</strong><br />
tok navitja<br />
negativna<br />
smer vrtenja<br />
tok navitja<br />
pozitivna smer<br />
vrtenja<br />
Oblike tokov pri koračnem motorju<br />
Mehatronika – Vanja Ambrožič<br />
20
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Koračni <strong>motorji</strong><br />
Mehatronika – Vanja Ambrožič<br />
21
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Brezkrtačni enosmerni motor (BLDC)<br />
Mehatronika – Vanja Ambrožič<br />
22
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Brezkrtačni enosmerni motor (BLDC)<br />
Mehatronika – Vanja Ambrožič<br />
23
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Brezkrtačni enosmerni in izmenični motor (BLDC in BLAC)<br />
Mehatronika – Vanja Ambrožič<br />
24
<strong>Univerza</strong> v <strong>Ljubljani</strong><br />
Fakulteta za elektrotehniko<br />
Asinhronski <strong>motorji</strong><br />
pretvornik<br />
omrežje<br />
R<br />
S<br />
3 ∼<br />
L<br />
C<br />
R<br />
T<br />
T 1 D 1 T 2 D 2 T 3 D 3<br />
T 4 D 4 T 5 D 5 T 6 D 6<br />
T<br />
=<br />
µ P<br />
PWM/<br />
čas.dis.<br />
T 1 ... T 6<br />
i S1<br />
i S2<br />
motor<br />
i S3<br />
RAM<br />
DIO<br />
EPROM<br />
ser. vm.<br />
D<br />
A<br />
ovred.<br />
ω in ε<br />
2<br />
3<br />
TD<br />
dajalnik hitrosti oz. pozicije<br />
procesni mikroračunalnik<br />
Mehatronika – Vanja Ambrožič<br />
25