

Manipulator przeznaczony do celów dydaktycznych - Laboratorium ...
Manipulator przeznaczony do celów dydaktycznych - Laboratorium ...
Manipulator przeznaczony do celów dydaktycznych - Laboratorium ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
37<br />
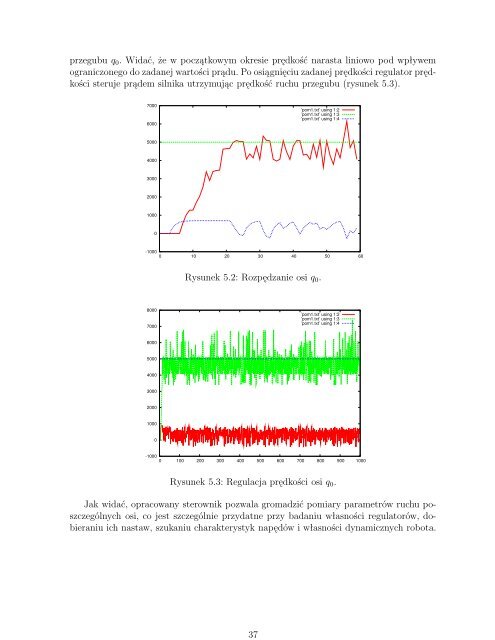
przegubu q 0 . Widać, że w początkowym okresie prędkość narasta liniowo pod wpływem<br />
ograniczonego <strong>do</strong> zadanej wartości prądu. Po osiągnięciu zadanej prędkości regulator prędkości<br />
steruje prądem silnika utrzymując prędkość ruchu przegubu (rysunek 5.3).<br />
7000<br />
6000<br />
’pom1.txt’ using 1:2<br />
’pom1.txt’ using 1:3<br />
’pom1.txt’ using 1:4<br />
5000<br />
4000<br />
3000<br />
2000<br />
1000<br />
0<br />
-1000<br />
0 10 20 30 40 50 60<br />
Rysunek 5.2: Rozpędzanie osi q 0 .<br />
8000<br />
7000<br />
’pom1.txt’ using 1:2<br />
’pom1.txt’ using 1:3<br />
’pom1.txt’ using 1:4<br />
6000<br />
5000<br />
4000<br />
3000<br />
2000<br />
1000<br />
0<br />
-1000<br />
0 100 200 300 400 500 600 700 800 900 1000<br />
Rysunek 5.3: Regulacja prędkości osi q 0 .<br />
Jak widać, opracowany sterownik pozwala gromadzić pomiary parametrów ruchu poszczególnych<br />
osi, co jest szczególnie przydatne przy badaniu własności regulatorów, <strong>do</strong>bieraniu<br />
ich nastaw, szukaniu charakterystyk napędów i własności dynamicznych robota.














