Manipulator przeznaczony do celów dydaktycznych - Laboratorium ...
Manipulator przeznaczony do celów dydaktycznych - Laboratorium ... Manipulator przeznaczony do celów dydaktycznych - Laboratorium ...
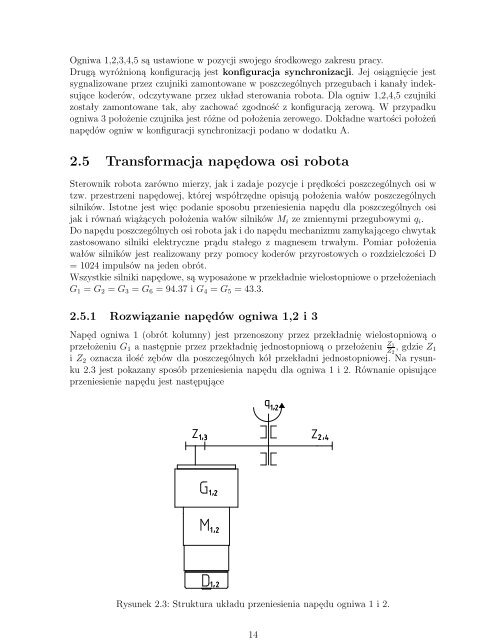
14 Ogniwa 1,2,3,4,5 są ustawione w pozycji swojego środkowego zakresu pracy. Drugą wyróżnioną konfiguracją jest konfiguracja synchronizacji. Jej osiągnięcie jest sygnalizowane przez czujniki zamontowane w poszczególnych przegubach i kanały indeksujące koderów, odczytywane przez układ sterowania robota. Dla ogniw 1,2,4,5 czujniki zostały zamontowane tak, aby zachować zgodność z konfiguracją zerową. W przypadku ogniwa 3 położenie czujnika jest różne od położenia zerowego. Dokładne wartości położeń napędów ogniw w konfiguracji synchronizacji podano w dodatku A. 2.5 Transformacja napędowa osi robota Sterownik robota zarówno mierzy, jak i zadaje pozycje i prędkości poszczególnych osi w tzw. przestrzeni napędowej, której współrzędne opisują położenia wałów poszczególnych silników. Istotne jest więc podanie sposobu przeniesienia napędu dla poszczególnych osi jak i równań wiążących położenia wałów silników M i ze zmiennymi przegubowymi q i . Do napędu poszczególnych osi robota jak i do napędu mechanizmu zamykającego chwytak zastosowano silniki elektryczne prądu stałego z magnesem trwałym. Pomiar położenia wałów silników jest realizowany przy pomocy koderów przyrostowych o rozdzielczości D = 1024 impulsów na jeden obrót. Wszystkie silniki napędowe, są wyposażone w przekładnie wielostopniowe o przełożeniach G 1 = G 2 = G 3 = G 6 = 94.37 i G 4 = G 5 = 43.3. 2.5.1 Rozwiązanie napędów ogniwa 1,2 i 3 Napęd ogniwa 1 (obrót kolumny) jest przenoszony przez przekładnię wielostopniową o przełożeniu G 1 a następnie przez przekładnię jednostopniową o przełożeniu Z 1 Z 2 , gdzie Z 1 i Z 2 oznacza ilość zębów dla poszczególnych kół przekładni jednostopniowej. Na rysunku 2.3 jest pokazany sposób przeniesienia napędu dla ogniwa 1 i 2. Równanie opisujące przeniesienie napędu jest następujące Rysunek 2.3: Struktura układu przeniesienia napędu ogniwa 1 i 2.
15 q 1 − q 01 = Z 12π Z 2 DG 1 (M 1 − M 01 ), (2.24) gdzie q 0i jest wartością zmiennej przegubowej q i w konfiguracji zerowej, a M 0i jest wartością zmiennej napędowej M i w konfiguracji zerowej. Transformacja prosta napędu c 1 = cos q 1 (2.25) s 1 = sin q 1 , ostatecznie ma postać a transformacja odwrotna czyli c 1 = cos (q 01 + s 1 = sin (q 01 + Z 12π Z 2 DG 1 (M 1 − M 01 )), (2.26) Z 12π Z 2 DG 1 (M 1 − M 01 )), (2.27) q 1 = Atan2(s 1 , c 1 ), (2.28) M 1 = M 01 + Z 2DG 1 Z 1 2π (Atan2(s 1, c 1 ) − q 01 ). (2.29) W przypadku ogniwa 2 (główne ramię) sposób przeniesienia napędu jest analogiczny jak w przypadku ogniwa 1 rysunek 2.3. A mianowicie, dla ogniwa drugiego, równanie napędu wyraża się wzorem q 2 − q 02 = Z 32π (M 2 − M 02 ), (2.30) Z 4 DG 2 Transformacja prosta napędu ma postać a transformacja odwrotna c 2 = cos (q 02 + s 2 = sin (q 02 + Z 32π Z 4 DG 2 (M 2 − M 02 )), (2.31) Z 32π Z 4 DG 2 (M 2 − M 02 )), (2.32) q 2 = Atan2(s 2 , c 2 ). (2.33) Z kolei dla ogniwa trzeciego sposób przeniesienia napędu różni się od sposobu w ogniwie 1 i 2 jedynie tym, że czynne koło zębate Z 5 przekładni jednostopniowej nie jest zamocowane na osi przekładni G 3 a jest napędzane poprzez przekładnie pasową zębatą o przełożeniu równym jeden, co widać na rysunku 2.4. Równanie napędu ogniwa 3 wyraża się wzorem q 3 − q 03 = Transformacja prosta napędu ma postać a transformacja odwrotna c 3 = cos (q 03 + s 3 = sin (q 03 + Z 52π Z 6 DG 3 (M 3 − M 03 ), (2.34) Z 52π Z 6 DG 3 (M 3 − M 03 )), (2.35) Z 52π Z 6 DG 3 (M 3 − M 03 )), (2.36) q 3 = Atan2(s 3 , c 3 ). (2.37)
- Page 1 and 2: Politechnika Wrocławska Wydział E
- Page 3 and 4: 1 Spis treści 1 Wstęp 6 1.1 Cel i
- Page 5 and 6: 3 Spis rysunków 2.1 Struktura kine
- Page 7 and 8: 5 Spis tabel 2.1 Parametry Denavita
- Page 9 and 10: 7 Rozdział 2 Kinematyka manipulato
- Page 11 and 12: 9 W celu wyliczenia kinematyki mani
- Page 13 and 14: 11 Przy podejściu geometrycznym [1
- Page 15: 13 czyli Podobnie wyznaczamy kat α
- Page 19 and 20: 17 Rysunek 2.5: Struktura układu r
- Page 21 and 22: Rysunek 3.2: Rysunek złożeniowy m
- Page 23 and 24: 21 Rysunek 3.3: Zdjęcie silnika HL
- Page 25 and 26: 23 3.2 Konstrukcja elektroniczna -
- Page 27 and 28: 25 Rysunek 3.9: Moduł EM332/B. Do
- Page 29 and 30: 27 3.2.3 Opis łączówek sterownik
- Page 31 and 32: 29 oznaczenie opis styk GND masa sy
- Page 33 and 34: 31 Rozdział 4 Oprogramowanie stero
- Page 35 and 36: 33 .\\ }NAS; NAS nast; Wszystkie pr
- Page 37 and 38: 35 length++; while(length) { length
- Page 39 and 40: 37 przegubu q 0 . Widać, że w poc
- Page 41 and 42: przewidziano złącze pozwalające
- Page 43 and 44: 41 Rozdział 7 Dodatek A 7.1 Parame
- Page 62 and 63: 60 Rozdział 8 Dodatek B 8.1 Wykaz
- Page 64 and 65: 62 liczba wartość obudowa oznacze
14<br />
Ogniwa 1,2,3,4,5 są ustawione w pozycji swojego środkowego zakresu pracy.<br />
Drugą wyróżnioną konfiguracją jest konfiguracja synchronizacji. Jej osiągnięcie jest<br />
sygnalizowane przez czujniki zamontowane w poszczególnych przegubach i kanały indeksujące<br />
koderów, odczytywane przez układ sterowania robota. Dla ogniw 1,2,4,5 czujniki<br />
zostały zamontowane tak, aby zachować zgodność z konfiguracją zerową. W przypadku<br />
ogniwa 3 położenie czujnika jest różne od położenia zerowego. Dokładne wartości położeń<br />
napędów ogniw w konfiguracji synchronizacji podano w <strong>do</strong>datku A.<br />
2.5 Transformacja napę<strong>do</strong>wa osi robota<br />
Sterownik robota zarówno mierzy, jak i zadaje pozycje i prędkości poszczególnych osi w<br />
tzw. przestrzeni napę<strong>do</strong>wej, której współrzędne opisują położenia wałów poszczególnych<br />
silników. Istotne jest więc podanie sposobu przeniesienia napędu dla poszczególnych osi<br />
jak i równań wiążących położenia wałów silników M i ze zmiennymi przegubowymi q i .<br />
Do napędu poszczególnych osi robota jak i <strong>do</strong> napędu mechanizmu zamykającego chwytak<br />
zastosowano silniki elektryczne prądu stałego z magnesem trwałym. Pomiar położenia<br />
wałów silników jest realizowany przy pomocy koderów przyrostowych o rozdzielczości D<br />
= 1024 impulsów na jeden obrót.<br />
Wszystkie silniki napę<strong>do</strong>we, są wyposażone w przekładnie wielostopniowe o przełożeniach<br />
G 1 = G 2 = G 3 = G 6 = 94.37 i G 4 = G 5 = 43.3.<br />
2.5.1 Rozwiązanie napędów ogniwa 1,2 i 3<br />
Napęd ogniwa 1 (obrót kolumny) jest przenoszony przez przekładnię wielostopniową o<br />
przełożeniu G 1 a następnie przez przekładnię jednostopniową o przełożeniu Z 1<br />
Z 2<br />
, gdzie Z 1<br />
i Z 2 oznacza ilość zębów dla poszczególnych kół przekładni jednostopniowej. Na rysunku<br />
2.3 jest pokazany sposób przeniesienia napędu dla ogniwa 1 i 2. Równanie opisujące<br />
przeniesienie napędu jest następujące<br />
Rysunek 2.3: Struktura układu przeniesienia napędu ogniwa 1 i 2.


