PDF datoteka - LES
PDF datoteka - LES
PDF datoteka - LES

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
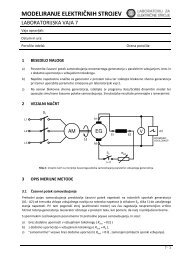
MODELIRANJE ELEKTRIČNIH STROJEV<br />
LABORATORIJSKA VAJA 4<br />
Vajo opravljali:<br />
Datum in ura:<br />
Poročilo izdelal:<br />
Ocena poročila:<br />
1 BESEDILO NALOGE<br />
Sinhronskemu stroju z izraženimi poli izmerite vzdolžno in prečno sinhronsko reaktanco ter medsebojno<br />
induktivnost dveh faznih navitij.<br />
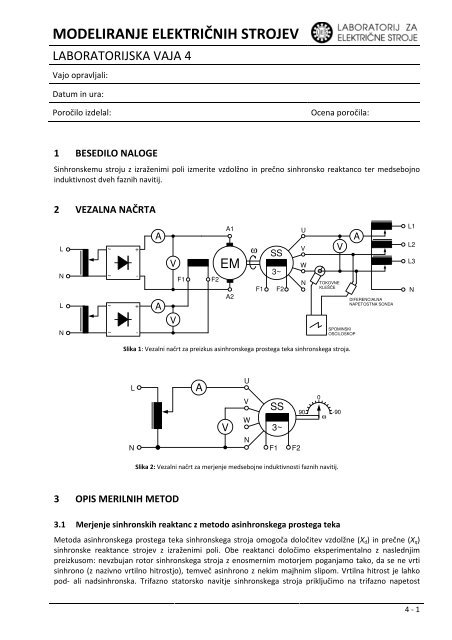
2 VEZALNA NAČRTA<br />
L<br />
N<br />
L<br />
N<br />
~ +<br />
~ -<br />
~ +<br />
~ -<br />
A<br />
A<br />
V<br />
V<br />
F1<br />
A1<br />
EM<br />
F2<br />
A2<br />
ω<br />
F1<br />
SS<br />
3~<br />
F2<br />
U<br />
V<br />
W<br />
N<br />
TOKOVNE<br />
KLEŠČE<br />
V<br />
A<br />
SPOMINSKI<br />
OSCILOSKOP<br />
DIFERENCIALNA<br />
NAPETOSTNA SONDA<br />
L1<br />
L2<br />
L3<br />
N<br />
Slika 1: Vezalni načrt za preizkus asinhronskega prostega teka sinhronskega stroja.<br />
L<br />
N<br />
A<br />
V<br />
U<br />
V<br />
W<br />
N<br />
SS<br />
3~<br />
F1<br />
F2<br />
0<br />
90 -90<br />
Θ<br />
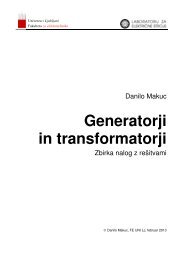
Slika 2: Vezalni načrt za merjenje medsebojne induktivnosti faznih navitij.<br />
3 OPIS MERILNIH METOD<br />
3.1 Merjenje sinhronskih reaktanc z metodo asinhronskega prostega teka<br />
Metoda asinhronskega prostega teka sinhronskega stroja omogoča določitev vzdolžne (X d ) in prečne (X q )<br />
sinhronske reaktance strojev z izraženimi poli. Obe reaktanci določimo eksperimentalno z naslednjim<br />
preizkusom: nevzbujan rotor sinhronskega stroja z enosmernim motorjem poganjamo tako, da se ne vrti<br />
sinhrono (z nazivno vrtilno hitrostjo), temveč asinhrono z nekim majhnim slipom. Vrtilna hitrost je lahko<br />
pod- ali nadsinhronska. Trifazno statorsko navitje sinhronskega stroja priključimo na trifazno napetost<br />
4 - 1
MODELIRANJE ELEKTRIČNIH STROJEV<br />
nazivne frekvence. Višina priključene napetosti znaša približno 25% nazivne napetosti U n . Tok, ki priteka iz<br />
omrežja v statorsko navitje je relativno velik, a v kolikor je večji od nazivnega, ustrezno zmanjšamo<br />
pritisnjeno napetost.<br />
Ker se rotor ne vrti sinhrono z vrtilnim poljem, se tudi njegov kot glede na os statorskega vrtilnega polja<br />
nenehno spreminja. V nekem trenutku je vzdolžna os rotorja poravnana z osjo vrtilnega polja statorja, v<br />
drugem pa leži rotor prečno na os vrtilnega polja (slika 3).<br />
(a)<br />
(b)<br />
Slika 3: Silnice magnetnega polja, ko je (a) rotor v vzdolžni legi in (b) v prečni legi glede na os vrtilnega polja.<br />
Zaradi različnih reluktanc (magnetnih upornosti) v eni in drugi osi, se amplituda izmeničnega toka iz<br />
omrežja spreminja med vrednostjo I d in večjo vrednostjo I q (slika 4).<br />
Napetost in tok statorskega navitja opazujemo na osciloskopu. Vrednost amplitude toka I d odčitamo z<br />
oscilograma takrat, ko je statorski tok najmanjši in je rotor v vzdolžni legi, največji statorski tok pa<br />
predstavlja vrednost I q , ko je rotor v prečni legi. Napetost se lahko zaradi napetostnih padcev v napajalnem<br />
viru utripajoče spreminja, kar razberemo iz oscilograma napetosti. Napetost je nižja (U q ), ko je tok večji (I q )<br />
in obratno (U d , I d ), tako da iz oscilograma odčitamo amplitudni vrednosti U d in U q .<br />
i<br />
I q<br />
I d<br />
t<br />
Slika 4: Tok v statorskem navitju pri preizkusu asinhronskega prostega teka.<br />
Navitje ima pretežno induktiven karakter, zato lahko nenasičeni vrednosti vzdolžne in prečne sinhronske<br />
reaktance enostavno izenačimo z absolutno vrednostjo impedanc:<br />
X<br />
Z<br />
U<br />
d<br />
d<br />
≐<br />
d<br />
= , (1)<br />
3 ⋅Id<br />
4 - 2
MODELIRANJE ELEKTRIČNIH STROJEV<br />
X<br />
U<br />
q<br />
q<br />
≐ Zq<br />
= . (2)<br />
3 ⋅Iq<br />
Čeprav so vse odčitane vrednosti amplitude, vrednosti le-teh nismo preračunali v efektivne vrednosti, saj<br />
nastopajo v enačbi tako v števcu in imenovalcu in so končne vrednosti enake. V kolikor je utripanje<br />
napetosti zanemarljivo, lahko merimo napetost le z voltmetrom (efektivna vrednost), a takrat poskrbimo<br />
za potrebno ustrezno uskladitev vrednosti obeh količin.<br />
Običajno sinhronskih reaktanc ne podajajamo v absolutnih vrednostih, temveč kot relativne oziroma<br />
normirane vrednosti. Relativno vrednost sinhronske reaktance dobimo, če njeno dejansko vrednost delimo<br />
z vrednostjo osnovne ali nazivne impedance. Osnovna impedanca stroja je podana z njegovimi nazivnimi<br />
količinami:<br />
Z<br />
U<br />
n<br />
osn<br />
= =<br />
3 ⋅ In<br />
U<br />
S<br />
2<br />
n<br />
n<br />
. (3)<br />
Relativni sinhronski reaktanci x d in x q torej izračunamo:<br />
x<br />
x<br />
X<br />
d<br />
d<br />
= , (4)<br />
Zosn<br />
X<br />
q<br />
q<br />
= . (5)<br />
Zosn<br />
3.2 Merjenje medsebojnih induktivnosti<br />
Medsebojno induktivnost dveh statorskih faznih navitij bomo merili v stanju, ko rotor miruje in ni vzbujen.<br />
Meritev bomo izvedli z metodo transformirane inducirane napetosti. Na sliki 5 je sistem dveh, med seboj<br />
magnetno sklopljenih tuljav. Inducirana napetost v drugi tuljavi je posledica izmeničnega magnetnega<br />
pretoka, ki ga v drugi tuljavi ustvarja tok prve (napajane) tuljave.<br />
ω<br />
~<br />
L 12<br />
I 1<br />
U 2<br />
V<br />
Slika 5: Merjenje medsebojne induktivnosti z metodo transformirane inducirane napetosti.<br />
Pri izmeničnem napajanju lahko inducirano (transformirano) napetost v drugi tuljavi izrazimo s pomočjo<br />
medsebojne induktivnosti:<br />
U = ω⋅L ⋅ I = 2π ⋅ f ⋅L ⋅ I . (6)<br />
2 12 1 12 1<br />
Medsebojna induktivnost je tako:<br />
U<br />
2<br />
12<br />
= . (7)<br />
2 π ⋅ f ⋅ I1<br />
L<br />
V našem primeru navitje prve faze napajamo z izmenično napetostjo in merimo tok, ki teče v to navitje, na<br />
sponkah navitja druge faze pa merimo inducirano napetost (slika 2). Ker gre v našem primeru za sinhronski<br />
stroj z rotorjem, ki ima izražene pole, je medsebojna induktivnost navitij odvisna tudi od položaja rotorja.<br />
Meritve opravimo pri različnih kotih rotorja, tako da je končni rezultat izmerjena medsebojna iduktivnost v<br />
odvisnosti od kota rotorja L 12 = f(Θ). Izračunane rezultate prikažemo v diagramu.<br />
4 - 3
MODELIRANJE ELEKTRIČNIH STROJEV<br />
4 VPRAŠANJA ZA RAZMISLEK<br />
a) Kdaj govorimo o nasičenih in nenasičenih reaktancah sinhronskega stroja<br />
b) Kakšna bi bila oblika toka v statorskih navitjih pri asinhronskem teku sinhronskega stroja z<br />
neizraženimi poli (turbogeneratorji)<br />
c) Ali lahko z metodo asinhronskega prostega teka merimo sinhronske reaktance stroja, ki ima na<br />
rotorju dušilno kratkostično kletko<br />
d) Zakaj je tok pri asinhronskem teku, v prečni legi rotorja večji od tistega, ko je rotor v vzdolžni legi.<br />
e) Ali je pri metodi za merjenje medsebojne induktivnosti le-ta odvisna od napajalnega toka<br />
5 PRIPOROČENA LITERATURA<br />
[1] France Avčin, Peter Jereb, Preizkušanje električnih strojev, Tehniška založba Slovenije, Ljubljana,<br />
1983;<br />
[2] Peter Jereb, Damijan Miljavec, Vezna teorija električnih strojev, Založba FE in FRI, Ljubljana, 2009.<br />
[3] Miljavec Damijan, Peter Jereb, Električni stroji - temeljna znanja, Ljubljana, 2005.<br />
[4] Ivan Zagradišnik, Bojan Slemnik, Električni rotacijski stroji, FERI, Maribor, 2001.<br />
[5] Bhag S. Guru, Hüseyin R. Hiziroglu, Electric Machinery and Transformers, Oxford University Press,<br />
New York, 2001.<br />
6 NEVARNOSTI PRI DELU<br />
POZOR, NEVARNOST ELEKTRIČNEGA UDARA!<br />
NAPAJALNA IZMENIČNA IN ENOSMERNA NAPETOST DO 400 V.<br />
MERILNO VEZJE, INSTRUMENTE IN NAPRAVE VEDNO VEŽITE, PRIKLAPLJAJTE ALI<br />
ODKLAPLJAJTE V BREZNAPETOSTNEM STANJU!<br />
MED MERITVIJO SE NE DOTIKAJTE MERILNIH VEZI, PRIKLJUČNIH SPONK IN<br />
MERJENCA!<br />
POZOR, NEVARNOST OBLOKA IN VISOKE INDUCIRANE NAPETOSTI!<br />
OB PREKINITVI ENOSMERNIH TOKOKROGOV OBSTAJA MOŽNOST NASTANKA<br />
ELEKTRIČNEGA OBLOKA IN INDUCIRANJA VISOKIH NAPETOSTI.<br />
POZOR, NEVARNOST DOTIKA VRTEČIH SE DELOV STROJA!<br />
ZARADI IZVAJANJA MERITEV, VSI VRTEČI DELI NISO MEHANSKO ZAŠČITENI.<br />
MED OBRATOVANJEM STROJA SE NE DOTIKAJTE IN NE SEGAJTE V OBMOČJE<br />
VRTEČIH SE DELOV STROJA!<br />
PO IZKLJUČITVI STROJA POČAKAJTE, DA SE LE-TA USTAVI!<br />
4 - 4
MODELIRANJE ELEKTRIČNIH STROJEV<br />
PRIPRAVA NA LABORATORIJSKO VAJO 4<br />
Statorsko navitje nevzbujenega trifaznega sinhronskega stroja z nazivnimi podatki 400 V, 5 kVA, 50 Hz,<br />
cosϕ = 0,8, 1500 vrt/min, priključimo na napetost 100 V. Z elektromotorjem poganjamo rotor, da se vrti<br />
asinhrono in na osciloskopu opazujemo časovni potek statorskega toka ene faze.<br />
Izračunajte relativni vrednosti vzdolžne in prečne sinhronske reaktance ter določite hitrost vrtenja rotorja.<br />
1 A/div<br />
50 ms/div<br />
6 - 5