PDF datoteka - LES
PDF datoteka - LES
PDF datoteka - LES

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
GENERATORJI IN TRANSFORMATORJI<br />
LABORATORIJSKA VAJA 1<br />
Ime in priimek<br />
Datum in ura:<br />
Ocena poročila:<br />
1 BESEDILO NALOGE<br />
Trifazni sinhronski generator avtomatsko sinhronizirajte na omrežje.<br />
V generatorskem in motorskem režimu delovanja sinhronskega stroja izvedite meritve električnih količin<br />
pri različnih obratovalnih stanjih. V obeh načinih delovanja, s stroboskopom opazujte kolesni kot.<br />
Izdelajte švedski diagram in vanj vrišite obratovalna stanja generatorja, za motorska obratovanja pa<br />
narišite kazalčne diagrame.<br />
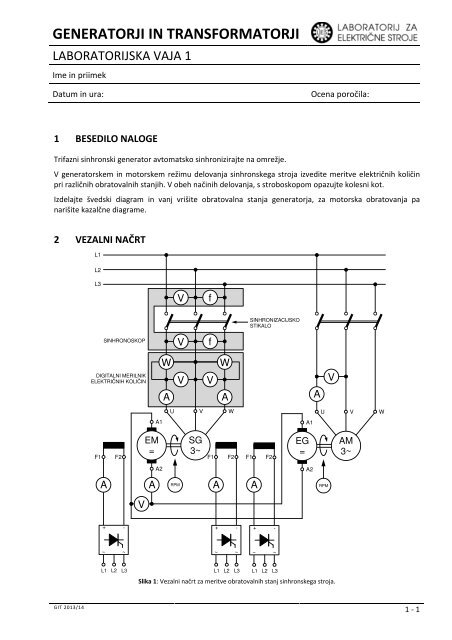
2 VEZALNI NAČRT<br />
L1<br />
L2<br />
L3<br />
V<br />
f<br />
SINHRONIZACIJSKO<br />
STIKALO<br />
SINHRONOSKOP<br />
V<br />
f<br />
DIGITALNI MERILNIK<br />
ELEKTRIČNIH KOLIČIN<br />
W<br />
A<br />
V<br />
V<br />
W<br />
A<br />
A<br />
V<br />
U<br />
V<br />
W<br />
U<br />
V<br />
W<br />
A1<br />
A1<br />
F1<br />
F2<br />
EM<br />
=<br />
SG<br />
3~<br />
F1<br />
F2<br />
F1<br />
F2<br />
EG<br />
=<br />
AM<br />
3~<br />
A2<br />
A2<br />
A<br />
A<br />
RPM<br />
A<br />
A<br />
RPM<br />
V<br />
+<br />
-<br />
+<br />
-<br />
+<br />
-<br />
~<br />
~<br />
~<br />
~<br />
~<br />
~<br />
L1 L2<br />
L3<br />
L1 L2 L3 L1 L2 L3<br />
Slika 1: Vezalni načrt za meritve obratovalnih stanj sinhronskega stroja.<br />
GIT 2013/14<br />
1 - 1
GENERATORJI IN TRANSFORMATORJI<br />
3 OPIS MERILNIH METOD<br />
3.1 Avtomatska sinhronizacija<br />
Pred priklopom sinhronskega stroja na omrežje, je potrebno izvesti postopek sinhronizacije, ki zagotovi<br />
izpolnitev pogojev za uspešno sinhronizacijo:<br />
1. efektivni napetosti sinhronskega stroja in omrežja morata biti enaki,<br />
2. frekvenci obeh sistemov morata biti enaki,<br />
3. zaporedji faz obeh sistemov morata biti enaki,<br />
4. napetosti istih faz obeh sistemov morajo biti v fazi.<br />
Postopek sinhronizacije se lahko izvede ročno ali avtomatsko. Ključni sestavni del sistema za avtomatsko<br />
sinhronizacijo je sinhronizator. To je naprava, ki na podlagi merjenja časovnega poteka napetosti obeh<br />
električnih sistemov (omrežje/generator), izdaja ukaze za spreminjanje hitrosti in napetosti generatorja ter<br />
izda ukaz za vklop sinhronizacijskega stikala. Avtomatski sinhronizatorji so komercialno dobavljivi. To so<br />
naprave z ustreznimi merilnimi ter vhodnimi in izhodnimi kanali, same periferne enote (merilni pretvorniki,<br />
napetostni in hitrostni regulator, vhodna in izhodna stikala idr.) pa je potrebno ustrezno izbrati oz. izdelati<br />
glede na lastnosti in nazivne vrednosti sistema, ki se ga želi sinhronizirati.<br />
V našem primeru je kot sinhronizator uporabljena naprava ABB Synchrotact 5 – SYN 5202 (donacija ABB<br />
Slovenija). Na sliki 2 je shema celotnega Ward Leonardovega (WL) pogona in sistema za avtomatsko<br />
sinhronizacijo. Trifazna napetostna merilna transformatorja sta izvedena z dvema enofaznima<br />
transformatorjema v vezavi V. Sinhronizator ima za avtomatsko vodenje sinhronizacije pet relejskih<br />
izhodov: U+ in U- (višanje in nižanje napetosti), f+ in f- (večanje in manjšanje frekvence) ter izhod<br />
ORDER, preko katerega se vključi sinhronizacijko stikalo (kontaktor).<br />
L1<br />
L2<br />
L3<br />
N<br />
NAPETOSTNI MERILNI<br />
TRANSFORMATOR<br />
SINHRONIZACIJSKI<br />
KONTAKTOR<br />
U GEN U OMR ORDER<br />
ABB SYN 5202 L1<br />
U+ U- f+ f-<br />
I+<br />
I-<br />
AVTOMATSKI<br />
SINHRONIZATOR<br />
3-FAZNI<br />
KRMILJENI<br />
USMERNIK<br />
U SG<br />
U EG<br />
U EM<br />
+ - + - + -<br />
MIKROKRMILNIŠKI<br />
PRETVORNIK<br />
SIGNALOV<br />
L1 L2 L3 L1 L2 L3 L1 L2 L3<br />
Slika 2: Ward Leonardov pogon s sistemom za avtomatsko sinhronizacijo sinhronskega stroja na omrežje.<br />
1 - 2<br />
GIT 2013/14
GENERATORJI IN TRANSFORMATORJI<br />
Izhodi sinhronizatorja so v praksi načeloma vezani na regulatorja hitrosti (turbinski regulator) in napetosti<br />
(regulator vzbujanja), ki sta običajno sestavna dela postroja v elektrarni. Zaradi posebnosti našega pogona<br />
(WL sistem), pa izhodi sinhronizatorja krmilijo usmernika za napajanje vzbujalnih navitij enosmernega<br />
generatorja (nastavljanje hitrosti) in sinhronskega stroja (nastavljanje napetosti).<br />
3.2 Obratovalna stanja sinhronskega generatorja<br />
Po sinhronizaciji na omrežje, na generatorju nastavimo pet obratovalnih stanj. V vseh primerih bo<br />
generator nazivno obremenjen (I = I n ), različen bo le faktor moči (cosϕ) in sicer: 0.6 (L), 0.8 (L), 1.0, 0.8 (C)<br />
in 0.6 (C). Ko sinhronski stroj deluje kot generator, je pretok moči v uporabljenem postroju tak, kot je<br />
prikazano na sliki 3.<br />
OMREŽJE<br />
P el3<br />
P el2<br />
P el1<br />
P meh2<br />
P meh1<br />
SG EM EG AM<br />
Slika 3: Pretok moči v postroju, ko sinhronski stroj obratuje kot generator.<br />
Pri vsakem obratovalnem stanju izmerimo vse električne količine na statorskem navitju (U, I, P) ter<br />
vzbujalni tok (I v ). Velikost delovne moči generatorja nastavljamo z velikostjo mehanske moči na gredi (v<br />
našem primeru gre za spreminjanje napetosti na pogonskem enosmernem motorju), na velikost jalove<br />
moči pa vplivamo z vzbujalnim tokom sinhronskega generatorja (slika 4).<br />
I X s<br />
E 0<br />
I v<br />
δ<br />
U<br />
ϕ<br />
I<br />
Slika 4: Poenostavljen kazalčni diagram obremenjenega sinhronskega cilindričnim rotorjem.<br />
Na osnovi karakteristik in delovnih točk, ki so podani v prilogi ter z izmerjenimi podatki za posamezno<br />
obratovalno stanje, narišemo švedski diagram (glej literaturo) in grafično določimo potreben vzbujalni tok<br />
(slika 5). Dobljeno vrednost toka primerjamo z izmerjeno. Ker je v vseh obratovalnih stanjih bremenski tok<br />
enak nazivnemu, narišemo vsa stanja v en švedski diagram.<br />
GIT 2013/14<br />
1 - 3
GENERATORJI IN TRANSFORMATORJI<br />
E, I k<br />
KPT<br />
obrem. karak. za I=I n<br />
,cosϕ L =0<br />
U n<br />
B<br />
E<br />
(1-1.1) I vk<br />
I v<br />
KKS<br />
ϕ<br />
0<br />
I v0<br />
A<br />
D<br />
I n<br />
I vk<br />
I vL<br />
I v<br />
(pri cosϕ)<br />
C<br />
(I = I n , cosϕ L = 0)<br />
I v<br />
Slika 5: Primer določanja vzbujalnega toka sinhronskega generatorja s švedskim diagramom.<br />
3.2.1 Opazovanje kolesnega kota<br />
Kot med napetostjo E 0 in U imenujemo kolesni kot (δ - slika 4). Kolesni kot predstavlja kot med fizičnim<br />
položajem rotorja in rezultirajočim magnetnim poljem v stroju. Pomemben je zato, ker nam podaja<br />
informacijo o stabilnosti obratovanja. Pri sinhronskih strojih s cilindričnim rotorjem je navor in s tem<br />
mehanska oz. delovna moč največja takrat, ko je kolesni kot 90°, saj velja:<br />
M = M max ⋅sinδ<br />
(1)<br />
Moč pri kolesnem kotu 90° imenujemo omahna delovna moč (P om ). Stroj s cilindričnim rotorjem obratuje<br />
stabilno, če je kolesni kot manjši od 90°, če pa preseže 90°, pade iz sinhronizma. Zaradi zagotavljanja<br />
varnega in stabilnega obratovanja, generatorji nazivno obratujejo pri kolesnem kotu, ki je manjši od<br />
maksimalnega.<br />
Kolesni kot (δ) lahko opazujemo in merimo s stroboskopom, ki je sinhroniziran na statorsko frekvenco in<br />
osvetljuje vrtečo gred sinhronskega stroja. Zaradi sinhronizma slika rotorja miruje, pri obremenitvah stroja<br />
pa se značka premakne za vrednost kolesnega kota.<br />
3.3 Obratovalna stanja sinhronskega motorja<br />
Sinhronski stroj (SS) bomo uporabili kot motor. Da dosežemo to stanje, je potrebno spremeniti smer<br />
pretoka električne energije, ki jo v primeru generatorskega obratovanja, v obliki mehanske energije,<br />
dovajamo SS z enosmernim motorjem. Smer pretoka električne v enosmernem tokokrogu (EM-EG) določa<br />
višina inducirane napetosti. V primeru, ko sinhronizirani SS obratuje kot generator je inducirana napetost<br />
EG višja od tiste v EM zato moramo doseči obratno stanje, če želimo, da SS pravzame motorsko funkcijo.<br />
To dosežemo z znižanjem vzbujanja EG ali povečanjem vzbujanja EM.<br />
Ko SS obratuje kot motor mora asinhronski stroj, ki je prej deloval kot motor, obratovati kot generator in<br />
vračati energijo v omrežje. To se nazorno vidi tudi na tahometru, ki meri hitrost asinhronskega stroja, saj je<br />
vrtilna hitrost rotorja v tem primeru višja od sinhronske. Primarne funkcije strojev, za katere veljajo tudi<br />
nazivni podatki, podani na napisnih tablicah, so v tem primeru ravno nasprotne in pretok moči je v postroju<br />
usmerjen v drugo smer (slika 6).<br />
1 - 4<br />
GIT 2013/14
GENERATORJI IN TRANSFORMATORJI<br />
OMREŽJE<br />
P el1<br />
P el2<br />
P el3<br />
P meh1<br />
P meh2<br />
SG<br />
(SM)<br />
EM<br />
(EG)<br />
EG<br />
(EM)<br />
AM<br />
(AG)<br />
Slika 6: Pretok moči v postroju, ko sinhronski stroj obratuje kot motor.<br />
Sinhronskemu motorju bomo izmerili tri obratovalna stanja pri katerih bo vrednost statorskega toka<br />
znašala 2/3 nazivnega, faktor moči pa bo: 0.8 (L), 1.0 in 0.8 (C). Uporabimo enake oznake kot pri<br />
generatorju in izmerimo električne količine na statorskem navitju sinhronskega motorja (U, I, P) ter<br />
vzbujalni tok (I v ). Na osnovi izmerjenih električnih količin in karakteristike prostega teka narišemo<br />
poenostavljen kazalčni diagram za vsa tri obratovalna stanja sinhronskega motorja (slika 7).<br />
I X s<br />
E 0<br />
U<br />
δ<br />
I v<br />
ϕ<br />
I<br />
C<br />
L<br />
Slika 7: Kazalčni diagram sinhronskega motorja.<br />
Izračunamo fazni kot ϕ in narišemo kazalca U in I, pri čemer uporabimo ustrezno merilo, tako da bodo<br />
dolžine kazalcev sorazmerne relativnim vrednostim količin (normirane na nazivne vrednosti). Sedaj<br />
poznamo tudi smer kazalca padca napetosti na sinhronski reaktanci, ker pa vrednosti sinhronske reaktance<br />
ne poznamo, bomo vrh dobili tako, da s šestilom narišemo krožnico z dolžino inducirane napetosti E 0 .<br />
Karakteristika prostega teka (KPT) sicer podaja odvisnost inducirane napetosti sinhronskega stroja od<br />
vzbujalnega toka, vendar njeno področje ponavadi ne pokrije vrednosti vzbujalnih tokov, ki nastopajo, ko je<br />
sinhronski stroj obremenjen. Če bi karakteristiko prostega teka merili do nazivnega vzbujalnega toka, bi<br />
prišli globoko v nasičenje, kakršne pa niso dejanske magnetne razmere pri obremenjenem stroju, saj je<br />
zaradi reakcije indukta, magnetenje v stroju dosti manjše. Za določanje velikosti fiktivne inducirane<br />
napetosti E 0 tako uporabimo linearno karakteristiko prostega teka, ki jo na KPT določa nazivna napetost<br />
(slika 8):<br />
U k I (2)<br />
n = v0<br />
Z izmerjenim vzbujalnim tokom I v in linearno KPT določimo velikost kazalca E 0 :<br />
E0 = k I v<br />
(3)<br />
GIT 2013/14<br />
1 - 5
GENERATORJI IN TRANSFORMATORJI<br />
E<br />
KPT<br />
U n<br />
Linearna KPT<br />
0<br />
I v0 I v<br />
Slika 8: Izmerjena in linearna karakteristika prostega teka.<br />
4 VPRAŠANJA ZA RAZMISLEK<br />
a) Zakaj imajo sinhronski generatorji podan nazivni cosϕ? Ali generator lahko obratuje z drugačnim<br />
faktorjem moči?<br />
b) Ali lahko sinhronski stroj deluje istočasno kot motor in kompenzator jalove energije?<br />
c) Kako v uporabljenem postroju ugotovimo, da sinhronski stroj deluje kot motor?<br />
5 LITERATURA<br />
[1] F. Avčin, P. Jereb, Preizkušanje električnih strojev, Tehniška založba Slovenije, 1983.<br />
[2] Damijan Miljavec, Peter Jereb, Električni stroji - temeljna znanja, FE, Ljubljana, 2008.<br />
[3] I. Zagradišnik, B. Slemnik, Električni rotacijski stroji, FERI, Maribor, 2001.<br />
6 NEVARNOSTI PRI DELU<br />
POZOR, NEVARNOST ELEKTRIČNEGA UDARA!<br />
NAPAJALNA IZMENIČNA IN ENOSMERNA NAPETOST DO 400 V.<br />
MERILNO VEZJE, INSTRUMENTE IN NAPRAVE VEDNO VEŽITE, PRIKLAPLJAJTE ALI<br />
ODKLAPLJAJTE V BREZNAPETOSTNEM STANJU!<br />
MED MERITVIJO SE NE DOTIKAJTE MERILNIH VEZI, PRIKLJUČNIH SPONK IN<br />
MERJENCA!<br />
POZOR, NEVARNOST OBLOKA IN VISOKE INDUCIRANE NAPETOSTI!<br />
OB PREKINITVI ENOSMERNIH TOKOKROGOV OBSTAJA MOŽNOST NASTANKA<br />
ELEKTRIČNEGA OBLOKA IN INDUCIRANJA VISOKIH NAPETOSTI.<br />
1 - 6<br />
GIT 2013/14
PRILOGA - Merilni rezultati preizkusov sinhronskega stroja<br />
GENERATORJI IN TRANSFORMATORJI<br />
1. Karakteristika prostega teka<br />
I v / A E / V<br />
0 6.1<br />
0.14 17.3<br />
0.36 35.9<br />
0.63 61.3<br />
0.91 88.7<br />
1.33 130.5<br />
1.63 160.0<br />
1.97 192.1<br />
2.33 226.0<br />
2.75 268.5<br />
3.20 298.3<br />
3.67 329.1<br />
4.27 367.2<br />
4.61 381.1<br />
5.06 399.6<br />
5.62 417.1<br />
6.22 435.6<br />
6.88 450.3<br />
7.87 468.9<br />
8.27 478.7<br />
E / V<br />
500<br />
450<br />
400<br />
350<br />
300<br />
250<br />
200<br />
150<br />
100<br />
50<br />
0<br />
0 1 2 3 4 5 6 7 8 9<br />
I v<br />
/ A<br />
2. Karakteristika kratkega stika<br />
I v / A I k / A<br />
0 0.6<br />
0.92 10.0<br />
1.92 20.1<br />
2.93 30.5<br />
3.85 39.9<br />
4.85 50.2<br />
5.80 60.0<br />
I k<br />
/ A<br />
60<br />
50<br />
40<br />
30<br />
20<br />
10<br />
0<br />
0 1 2 3 4 5 6<br />
I v<br />
/ A<br />
3. Nazivna obremenitev s čistim induktivnim bremenom<br />
U = 390 V<br />
I = 58 A<br />
cosϕ = 0<br />
I v = 11,3 A<br />
GIT 2013/14<br />
1 - 7