Pobierz PDF - Elektronika Praktyczna
Pobierz PDF - Elektronika Praktyczna
Pobierz PDF - Elektronika Praktyczna

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
System nawigacji<br />
satelitarnej GPS, część 7<br />
Pozycja, prędkość i czas<br />
Z dotychczasowych rozważań<br />
wynika, że odbiornik GPS<br />
ustala położenie użytkownika<br />
(x, y, z) w prostokątnym układzie<br />
współrzędnych ECEF WGS–84.<br />
Takich współrzędnych nie<br />
znajdziemy jednak na żadnej<br />
mapie, a więc posługiwanie się<br />
nimi jest mało praktyczne.<br />
K U R S<br />
Bardziej użyteczne jest przeliczenie<br />
uzyskanego położenia do postaci<br />
współrzędnych elipsoidalnych<br />
(ϕ, λ, h), które stanowią odpowiednio<br />
szerokość geodezyjną, długość geodezyjną<br />
i wysokość nad elipsoidą odniesienia.<br />
Kształt i rozmiary ziemskiej<br />
elipsoidy odniesienia są określone<br />
w definicji układu WGS–84.<br />
Jest to teoretyczna powierzchnia wybrana<br />
w taki sposób, aby możliwie<br />
dokładnie odzwierciedlała nieregularny<br />
kształt naszej planety. Długość i szerokość<br />
geodezyjna punktu o współrzędnych<br />
prostokątnych (x, y, z) jednoznacznie<br />
określają położenie rzutu prostokątnego<br />
tego punktu na powierzchni<br />
elipsoidy odniesienia. Wysokość jest<br />
natomiast odległością punktu (x, y, z)<br />
od tej elipsoidy. Zależności służące do<br />
przeliczenia współrzędnych prostokątnych<br />
na elipsoidalne są na pierwszy<br />
rzut oka dość zawiłe, ale nie są kłopotliwe<br />
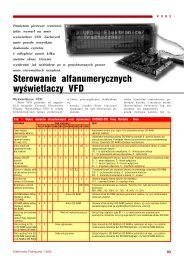
w praktycznym użyciu. Relację<br />
pomiędzy współrzędnymi prostokąt-<br />
Rys. 29. Relacja współrzędnych prostokątnych i elipsoidalnych<br />
nymi, a elipsoidalnymi wyjaśniono na<br />
rys. 29, gdzie przedstawiono również<br />
jeden z możliwych sposobów transformacji<br />
współrzędnych. Warto zauważyć,<br />
że ze względu na spłaszczenie Ziemi,<br />
kierunek prostej biegnącej z punktu<br />
(x, y, z) do jej środka na ogół nie pokrywa<br />
się z kierunkiem przechodzącej<br />
przez ten punkt prostej prostopadłej<br />
do elipsoidy.<br />
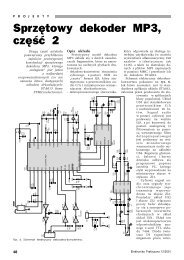
Warto też zwrócić uwagę, że podawana<br />
przez odbiornik GPS wysokość<br />
nad ziemską elipsoidą odniesienia<br />
nie jest równa ani wysokości nad<br />
p o w i e r z c h n i ą<br />
Ziemi, ani wysokości<br />
nad poziomem<br />
morza, od<br />
której lokalnie<br />
może się różnić<br />
nawet do 100 m.<br />
Po w i e r z c h n i a<br />
przebiegająca na<br />
średnim poziomie<br />
morza MSL<br />
(ang. Mean Sea<br />
Level) jest nazywana<br />
geoidą,<br />
a odległość N<br />
pomiędzy elipsoidą i geoidą określa<br />
się jako separację (undulację) geoidy.<br />
Relację pomiędzy wysokością elipsoidalną<br />
h, wysokością nad poziomem<br />
morza H i nad powierzchnią Ziemi h z<br />
wyjaśniono na rys. 30.<br />
Prędkość i kurs<br />
Oprócz położenia i czasu, system<br />
GPS umożliwia również wyznaczenie<br />
prędkości i kierunku ruchu użytkownika,<br />
czyli tzw. kursu drogi. Teoretycznie,<br />
wielkości te można by wyznaczać<br />
na podstawie dwóch kolejnych wartości<br />
położenia, otrzymanych podczas<br />
przetwarzania pseudoodległości, jednak<br />
znacznie dokładniejsze i szybciej reagujące<br />
na zmiany ruchu użytkownika<br />
wyniki uzyskuje się dzięki wykorzystaniu<br />
efektu Dopplera. Ze względu<br />
na szybki ruch satelitów GPS nawet<br />
odbiornik stacjonarny odbiera sygnały<br />
o częstotliwości zauważalnie różniącej<br />
się od nominalnej.<br />
Dopplerowskie przesunięcie częstotliwości<br />
spowodowane ruchem satelity<br />
jest zależne od wzajemnego położenia<br />
satelity względem odbiornika i może<br />
się zmieniać w zakresie ±5 kHz.<br />
<strong>Elektronika</strong> <strong>Praktyczna</strong> 8/2006<br />
97
K U R S<br />
odbieranych od satelitów, śledzą również<br />
bezpośrednio przekłada się na błąd<br />
fazę fali nośnej tych sygnałów pomiaru dopplerowskiego przesu-<br />
za pomocą pętli śledzenia fazy PLL nięcia częstotliwości, a tym samym<br />
(ang. Phase–Locked Loop) lub częstotliwość<br />
na błąd obliczanych w odbiorniku<br />
fali nośnej za pomocą pę-<br />
zmian pseudoodległości. Wyrażony<br />
tli śledzenie częstotliwości FLL (ang. w jednostkach prędkości, czyli w m/s<br />
Frequency–Locked Loop). W skład pętli<br />
błąd częstotliwości zegara nosi na-<br />
PLL lub FLL wchodzi generator zwę dryftu zegara i jest często ozna-<br />
przestrajany numerycznie NCO (ang. czany symbolem d. Podobnie jak<br />
Numerically Controlled Oscillator). Odbiorniki<br />
w przypadku pseudoodległości, błąd<br />
GPS obliczają wartość prze-<br />
ten jest na szczęście identyczny we<br />
Rys. 30. Relacja pomiędzy różnymi<br />
rodzajami wysokości<br />
sunięcia dopplerowskiego poprzez wszystkich<br />
w jednostkach<br />
równocześnie<br />
prdkoci,<br />
wykonanych<br />
zegara pomiarach nosi zmian nazw pseudoodle-<br />
dryftu zeg<br />
czy<br />
odczyt częstotliwości chwilowej ustawionej<br />
w NCO lub metodą zliczania głości, symbolem dzięki d. czemu Podobnie może być jak on w p<br />
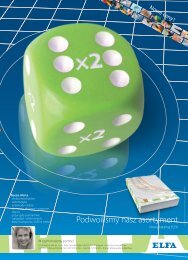
Największe wartości tego przesunięcia<br />
częstotliwości występują, kiedy satelita<br />
znajduje się tuż nad horyzontem, w stosunkowo krótkich odcinkach przynajmniej jednego nadmiarowego<br />
okresów sygnału wyjściowego NCO łatwo usunięty poprzez wykonanie<br />
w jednostkach prdkoci, ten czyli jest na w m/s szczcie błd czstotl identy<br />
ponieważ wtedy najszybciej zbliża czasu zegara (zwykle poniżej nosi 1 nazw s). Na podstawie<br />
symbolem tych obserwacji d. Podobnie w odbiorniku jak by Równanie w on przypadku łatwo przedstawiające usunity pseudoodległo<br />
zależ-<br />
poprze<br />
dryftu wykonanych<br />
pomiaru. zegara i pomiarach jest czsto zmian ozna p<br />
się lub oddala od odbiornika GPS.<br />
Zerowe przesunięcie występuje natomiast,<br />
gdy satelita znajduje się w naj-<br />
zmianami wykonanych pseudoodległości. pomiarach Zmiany zmian łożenia Równanie pseudoodległoci, i prędkości przedstawiajce odbiornika oraz dzik zal<br />
GPS ten są wyznaczane jest na wielkości szczcie zwane ność nadmiarowego identyczny zmian pseudoodległości we pomiaru. wszystkich od po-<br />
rów<br />
wyższym położeniu nad horyzontem pseudoodległości są wyrażone w m/s satelity GPS, a także od dryftu zegara<br />
odbiornika GPS, można zapisać<br />
by on łatwo usunity połoenia poprzez wykonanie i prdkoci przynajmni odbior<br />
względem odbiornika. Na rys. 31 i stanowią prędkości względne ruchu<br />
przedstawiono sposób, w jaki zmienia odbiornika nadmiarowego i odpowiedniego pomiaru. dryftu zegara odbiornika GPS<br />
satelity, korzystając z zasad geometrii. Przykładowe<br />
zasad zaleno równanie, geometrii. zapisane zmian Przykładowe<br />
dla pseudoodl<br />
po-<br />
się częstotliwość odbieranego sygnału<br />
wraz ze zmianą położenia satelity niem połoenia w tych pomiarach i prdkoci jest oczywimiaru<br />
pochodzcego odbiornika pochodzącego oraz od pierwszego satelity GPS s<br />
wzdłuż Równanie łączącej je przedstawiajce prostej. Odniesie-<br />
GPS.<br />
ście<br />
dryftu<br />
zegar odbiornika<br />
zegara<br />
GPS,<br />
odbiornika<br />
który jak satelity, nastpujco:<br />
GPS,<br />
przedstawia<br />
mona<br />
się<br />
zapisa<br />
następująco:<br />
korzys<br />
Dopplerowskie przesunięcie częstotliwości<br />
może być jeszcze większe, wysoką<br />
pamiętamy charakteryzuje się niezbyt<br />
zasad<br />
dokładnością.<br />
geometrii.<br />
Efekt tej ograniczonej<br />
pochodzcego dokładności był już od widoczny pierwszego<br />
Przykładowe ( x −równanie, X<br />
1<br />
)( vx<br />
−Vx<br />
1<br />
) + zapisane ( y − Y1<br />
)( v<br />
y<br />
−Vdl<br />
y1<br />
jeśli oprócz ruchu satelity uwzględnimy<br />
także ruch użytkownika. W przy-<br />
w pomiarach nastpujco:<br />
DR1<br />
=<br />
satelity, przedstawia 2<br />
2 s<br />
( X<br />
kodowych odległości satelita–odbiornik,<br />
1<br />
− x) + ( Y1<br />
− y)<br />
+<br />
padku pieszych, pojazdów lądowych<br />
( x −które X<br />
jak się okazało Wielkociami znanymi w tej z<br />
1<br />
)( vx<br />
−Vx<br />
1<br />
) + ( y − Y1<br />
)( v<br />
y<br />
−Vy<br />
1<br />
) + ( z − Z1<br />
)( vz<br />
−Vz1<br />
)<br />
i statków, prędkości są na tyle małe, nie są DRodległościami tylko pseudoodległościami.<br />
2<br />
2<br />
2<br />
1<br />
=<br />
pseudoodległoci DR 1 + , doblicz<br />
że ich wpływ na zmianę częstotliwości<br />
może być pominięty, jednak ruch Generator kwarcowy zegara od-<br />
( X<br />
1<br />
− x) + ( Ynawigacyjnej 1<br />
− y) + ( Z1<br />
− z)<br />
połoenie satel<br />
szybkich samolotów odrzutowych biornika Wielkociami GPS charakteryzuje znanymi się błędem<br />
pseudoodległoci częstotliwości, którego wartość DR 1 , obliczane leżności uzyskane są mierzona w wyniku podstawie zmiana rozwizani<br />
pseu-depeplerowskie<br />
w (Vtej Wielkościami x1 , zalenoci V y1 , V z1 znanymi<br />
), a s take<br />
w tej mierzona za-<br />
poło<br />
może wprowadzać dodatkowe dop-<br />
przesunięcie częstotliwości jest nawigacyjnej zwykle rzędu kilku połoenie lub więcej doodległości równaniu satelity DRwystpuj 1 (X , obliczane 1 , Y 1 , na Zrównie 1<br />
podstawie<br />
depeszy nawigacyjnej położe-<br />
) i jego c<br />
sięgające 5 kHz, a więc porównywalne kHz, a więc może nawet przekraczać<br />
(V<br />
z tym, które jest spowodowane ruchem<br />
satelity GPS.<br />
go sygnału uzyskane względem w wyniku częstotliwości rozwizania (V x1<br />
odchyłkę x1 , V<br />
częstotliwości y1 , V z1 ), a take poszukiwana połoenie uytkownika prdko uytkow (x, y<br />
odbieranenie<br />
satelity (X 1<br />
, Y 1<br />
, Z 1<br />
) i jego prędkość<br />
współrzdnych (v<br />
, V y1<br />
, V z1<br />
), równa a także położenie pseudoodległo<br />
x , v<br />
użytkownika<br />
przypadku cztery (x, y, z), wyznaczania uzyskane niewiadome, w wyniku połoe któr<br />
y , v z ) or<br />
Odbiorniki GPS śledzące fazę nominalnej równaniu spowodowaną wystpuj efektem równie<br />
kodu pseudolosowego C/A sygnałów Dopplera. poszukiwana Błąd częstotliwości prdko zegara uytkownika rozwiązania jego prdkoci równań w pseudoodległości.<br />
prostoktnym konieczne jes uk<br />
współrzdnych (v W przynajmniej równaniu występują czterech również czte-<br />
x , v y , v z ) oraz dryft zegara sateli d. Pod<br />
cztery<br />
niewiadome,<br />
równania<br />
którymi są<br />
zmian<br />
poszukiwana<br />
prędkość użytkownika w pro-<br />
przypadku wyznaczania połoenia uytkownika, pseudo przy<br />
jego prdkoci konieczne stokątnym<br />
równa jest wyznaczajc<br />
układzie odbieranie współrzędnych<br />
z sygnałów niego c<br />
przynajmniej czterech (v prdkoci satelitów. x<br />
, v y<br />
, v z<br />
) oraz dryft i Wówczas dryft zegara d. zegara Podobnie<br />
moe pseudoodległoci jak by w przypadku obliczana wyznaczania i w rozwiza odbiorn<br />
moemy odb sf<br />
cztery równania zmian<br />
równa wyznaczajc z niego<br />
położenia nawigacyjnego cztery<br />
użytkownika,<br />
niewiadome wyznaczanego przy wyznaczaniu<br />
jego prędkości konieczne jest<br />
(trzy p<br />
prdkoci i dryft zegara punktowe rozwizanie równa<br />
odbieranie<br />
odbiornika<br />
sygnałów od<br />
GPS).<br />
przynajmniej<br />
Prdko<br />
moe by obliczana w odbiorniku czterech analogiczny satelitów. GPS Wówczas do jako przedstawione<br />
możemy cz roz<br />
nawigacyjnego wyznaczanego sformułować połoenia przez cztery na filtr równania podstawie Kalmana, zmian równa lu<br />
punktowe rozwizanie równa pseudoodległości iteracyjn, zmian i z pseudoodległoci<br />
rozwiązać wykorzystaniem<br />
układ<br />
tych Podobnie równań, jak wyznaczając to ma z miejsce niego<br />
analogiczny do przedstawionego wczeniej sposobu w<br />
cztery niewiadome (trzy składowe<br />
połoenia na podstawie uytkownika (v<br />
prędkości równa i dryft pseudoodległoci, zegara x , v<br />
odbiornika y , v z ) jest tj<br />
iteracyjn, z wykorzystaniem GPS). prostoktnym Prędkość linearyzacji.<br />
użytkownika układzie może współr<br />
Podobnie jak to ma miejsce być widzenia obliczana w przypadku w uytkownika odbiorniku połoenia,<br />
GPS jako bardzie<br />
uytkownika (v część prdkoci rozwiązania wyraone nawigacyjnego w wyznaczanego<br />
x , v y , v z ) jest wyznaczana przez tzw. odbi lo<br />
współrzdnych<br />
przez filtr<br />
NED.<br />
Kalmana,<br />
Pocztek<br />
lub<br />
prostoktnym układzie współrzdnych ECEF WGS–84. Z<br />
poprzez punktowe rozwiązanie równań<br />
Rys. 31. Ilustracja wpływu położenia satelity na widzenia dopplerowskie uytkownika przesunięcie bardziej połoenia<br />
zmian pseudoodległości przydatne uytkownika byłyby w sposób<br />
a jego analogiczny lokalnym osie do s przedstawionego<br />
horyzontalnym skierowane nau<br />
współrzdnych NED. Pocztek w dół (D). tego Przeliczenie układu znajduje skłas<br />
połoenia uytkownika układzie (x, y, z) ECEF i przemieszcza XYZ do układu si<br />
(x, jed y,<br />
częstotliwości sygnału odbieranego przez nieruchomy prdkoci odbiornik wyraone GPS w tzw.<br />
98<br />
wektora <strong>Elektronika</strong> prdkoci <strong>Praktyczna</strong> zgodnie 8/2006<br />
a jego osie s skierowane na północ (N), wschód z (E<br />
w dół (D). Przeliczenie rys. składowych 31. prdkoci wyra
K U R S<br />
wcześniej sposobu wyznaczania położenia<br />
na podstawie równań pseudoodległości,<br />
tj. metodą iteracyjną,<br />
z wykorzystaniem linearyzacji.<br />
Podobnie jak to ma miejsce<br />
w przypadku położenia, prędkość<br />
użytkownika (v x<br />
, v y<br />
, v z<br />
) jest wyznaczana<br />
przez odbiornik GPS w prostokątnym<br />
układzie współrzędnych<br />
ECEF WGS–84. Z punktu widzenia<br />
użytkownika bardziej przydatne byłyby<br />
jednak składowe prędkości wyrażone<br />
w tzw. lokalnym horyzontalnym<br />
układzie współrzędnych NED. Początek<br />
tego układu znajduje się w miejscu<br />
położenia użytkownika (x, y, z)<br />
i przemieszcza się wraz z nim, a jego<br />
osie są skierowane na północ (N),<br />
wschód (E) i pionowo w dół (D).<br />
Przeliczenie składowych prędkości<br />
wyrażonych w układzie ECEF XYZ<br />
do układu NED wymaga dokonania<br />
obrotu wektora prędkości zgodnie<br />
z zależnościami, przedstawionymi na<br />
rys. 31.<br />
Większość użytkowników nawigacyjnych<br />
odbiorników GPS potrzebuje<br />
jedynie informacji o prędkości<br />
poziomej (horyzontalnej) oraz kursie<br />
INYNIER PROGRAMISTA (ref. SE)<br />
drogi i te właśnie dane<br />
dotyczące prędkości są<br />
zwykle podawane na<br />
wyjściu typowo skonfigurowanego<br />
odbiornika<br />
GPS, przekazującego<br />
wiadomości w formacie<br />
tekstowym, zgodnym<br />
Wieloletnie doskonalenie uczyniło nas najbardziej wszechstronnym producentem czci i systemów samochodowych.<br />
Zatrudniamy prawie 200 odbiorników tysicy pracowników w prawie GPS. 200 zakładach produkcyjnych na całym wiecie. Nowoczesna<br />
technologia i jako stały si podstaw szerokiej gamy rozwiza technicznych. W Polsce działamy ju od 1995 roku.<br />
Jestemy laureatem nagrody Piotr dla Najlepszego Kaniewski<br />
Inwestora Zagranicznego, a w 2003 roku zostalimy uhonorowani<br />
godłem Inwestor w Kapitał Ludzki.<br />
Do pracy w Centrum Technicznym w Krakowie poszukujemy osób na stanowiska:<br />
Zakres obowizków:<br />
Tworzenie oprogramowania dla samochodowych systemów sterowania,<br />
multimedialnych lub nawigacji satelitarnej.<br />
Wymagania:<br />
•Wykształcenie wysze (informatyka, elektronika, telekomunikacja lub<br />
pokrewne)<br />
•Znajomo jzyka C lub C++<br />
Dodatkowym atutem bdzie znajomo:<br />
•Systemów czasu rzeczywistego i systemów wbudowanych<br />
•Technologii obiektowych oraz jzyka UML<br />
•Inynierii oprogramowania<br />
•Cyfrowego przetwarzania sygnałów<br />
•Systemów multimedialnych<br />
•Pakietu Matlab<br />
prdkoci s zwykle podawane na wyjciu typowo<br />
skonfigurowanego odbiornika GPS, przekazujcego<br />
formacie tekstowym,<br />
Rys. 32. Układy<br />
zgodnym<br />
współrzędnych<br />
ze<br />
ECEF<br />
standardem<br />
i NED<br />
NMEA–0<br />
horyzontalna i kurs drogi s obliczane zgodnie z<br />
zalenociami:<br />
ze standardem NMEA–<br />
–0183. Prędkość horyzontalna<br />
i kurs drogi<br />
są obliczane zgodnie<br />
z następującymi zależnościami:<br />
Prdko = +<br />
v<br />
Kurs = arctg E<br />
vN<br />
2 2<br />
v N<br />
v E<br />
W dotychczasowej czci kursu, została omówiona<br />
komunikatów podaje proste w interpretacji<br />
sygnałów wielkości wyjściowe, GPS, prowadzce<br />
tj. po-<br />
kolejne przekształcenia<br />
wydzielenia z nich informacji łożenie, prędkość istotnej i czas. W jednym z punktu<br />
uytkownika. Mimo wielu z kolejnych uproszcze odcinku cyklu w opisie, zostanie wył<br />
bliżej omówiony format i zawartość<br />
niego obraz systemu bardzo skomplikowanego, w kt<br />
danych wyjściowych typowych nawigacyjnych<br />
odbiorników wiedzy GPS. z wielu<br />
było wykorzystanie zaawansowanej<br />
najnowszych osigni Piotr technologicznych. Kaniewski<br />
Z punktu<br />
uytkownika, cała ta pkaniewski@wat.edu.pl<br />
komplikacja jest jednak mał<br />
poniewa korzysta on z prostego w obsłudze odbio<br />
postaci prostych komunikatów podaje proste w int<br />
wielkoci wyjciowe, tj. połoenie, prdko i c<br />
z kolejnych odcinku cyklu zostanie bliej omówio<br />
zawarto danych wyjciowych typowych nawigacyjn<br />
W dotychczasowej części kursu,<br />
została omówiona struktura i kolejne<br />
przekształcenia sygnałów GPS, prowadzące<br />
do wydzielenia z nich informacji<br />
istotnej z punktu widzenia<br />
użytkownika. Mimo wielu uproszczeń<br />
w opisie, wyłania się z niego obraz<br />
systemu bardzo skomplikowanego,<br />
w którym konieczne było wykorzystanie<br />
zaawansowanej wiedzy z wielu<br />
dziedzin i najnowszych osiągnięć<br />
technologicznych. Z punktu widzenia<br />
użytkownika, cała ta komplikacja jest<br />
jednak mało widoczna, ponieważ korzysta<br />
on z prostego w obsłudze odbiornika,<br />
który w postaci prostych<br />
Rys. 28. Relacja współrzdnych prostoktnych i e<br />
Rys. 29. Relacja INYNIER pomidzy DS. TESTÓWrónymi rodzajami wyso<br />
OPROGRAMOWANIA (ref. STV)<br />
Rys. 30. Ilustracja wpływu połoenia satelity na<br />
przesunicie czstotliwoci sygnału odbieranego<br />
nieruchomy odbiornik GPS<br />
Rys. 31. Układy współrzdnych ECEF i NED<br />
Zakres obowizków:<br />
Tworzenie scenariuszy testowych, projektowanie rodowiska testowego<br />
(w tym do testów automatycznych)<br />
i wykonywanie testów oprogramowania.<br />
Wymagania:<br />
•Wykształcenie wysze (elektronika, informatyka, automatyka,<br />
telekomunikacja lub pokrewne)<br />
•Znajomo podstaw elektroniki<br />
•Znajomo zagadnie z zakresu miernictwa elektronicznego<br />
(oscyloskopy, generatory, analizatory itp.)<br />
•Znajomo systemów pomiarowych<br />
•Znajomo podstaw programowania (np. jzyk C lub C++)<br />
Dodatkowym atutem bdzie znajomo:<br />
•Jzyków skryptowych (Perl, TCL itp.)<br />
•Zagadnie z zakresu testowania systemów<br />
i oprogramowania<br />
Wymagania ogólne: dobra znajomo jzyka angielskiego, mobilno (czste podróe słubowe), umiejtno pracy w zespole<br />
Zaakceptowanym kandydatom oferujemy: interesujc prac w midzynarodowym zespole, w dynamicznie rozwijajcej si firmie * kontakt z najnowszymi<br />
technologiami * współprac z najwikszymi producentami samochodów * moliwo rozwoju i doskonalenia zawodowego * konkurencyjne wynagrodzenie<br />
i atrakcyjny pakiet socjalny * przyjazn atmosfer i bardzo dobre warunki pracy<br />
Osoby zainteresowane prosimy o przesyłanie CV i listu motywacyjnego w jzyku polskim i angielskim na adres:<br />
Magda Szyndera, Delphi Poland S.A. – Centrum Techniczne, ul. Podgórki Tynieckie 2, 30-399 Kraków, e-mail: magda.szyndera@delphi.com<br />
Prosimy o podanie w licie motywacyjnym symbolu referencyjnego.<br />
Przesyłamy potwierdzenie otrzymania aplikacji. W przypadku braku potwierdzenia, prosimy przesła dokumenty poczt tradycyjn.<br />
Uprzejmie informujemy, e kontaktujemy si tylko z wybranymi kandydatami. Na aplikacji prosimy o zawarcie nastpujcej klauzuli: Wyraam zgod na przetwarzanie moich danych osobowych<br />
zawartych w mojej ofercie pracy dla potrzeb niezbdnych do realizacji procesu rekrutacji (zgodnie z ustaw o ochronie danych osobowych z dnia 29.08.97 Dz. U. 133 Poz. 883)<br />
<strong>Elektronika</strong> <strong>Praktyczna</strong> 8/2006<br />
99