KÅivky a plochy v E3
KÅivky a plochy v E3
KÅivky a plochy v E3

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
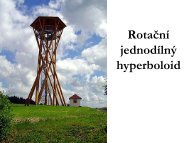
c) Rotační válcová plocha<br />
Rotační válcovou plochu získáme rotací přímky, která je s osou rotace rovnoběžná.<br />
Příklad:<br />
Odvodíme parametrizaci rotační válcové <strong>plochy</strong>, která vznikne rotací přímky p, která je<br />
parametrizována bodovou funkcí<br />
1<br />
X u O R e ,<br />
1<br />
u e3 u R,<br />
kolem osy z.<br />
Řešení:<br />
Rotační válcová plocha je parametrizována bodovou funkcí<br />
X u O R t v u e O R cos v,sin<br />
v,0<br />
u 0,0,1 Rcos<br />
v,<br />
Rsin<br />
v,<br />
u , u R,<br />
v 0,2 .<br />
<br />
Plocha má parametrické rovnice<br />
x Rcos<br />
v<br />
z u,<br />
1 3<br />
<br />
y Rsin<br />
v<br />
v <br />
0,2<br />
,<br />
u R,<br />
což jsou tytéž rovnice jako v příkladu, kdy jsme vytvořili rotační válcovou plochu jako translační<br />
plochu.<br />
Rotace kolem obecné přímky:<br />
Nyní ukážeme odvození parametrizace libovolné rotační <strong>plochy</strong>, kdy osa rotace nemusí být osou<br />
souřadnic.<br />
Nechť osa rotace je libovolná přímka o, která prochází počátkem O a její směrový vektor je<br />
jednotkový vektor t 3<br />
. Dále nechť t 1<br />
a t 2<br />
jsou vektory, které tvoří ortonormální bázi zaměření roviny<br />
kolmé k ose rotace. Rotovat necháme rovinnou křivku M, která má parametrické vyjádření<br />
x xu, y 0, z zu,<br />
u I .<br />
Křivku umístíme do roviny, která je určena osou rotace a přímkou, která prochází počátkem O a její<br />
směrový vektor je t 1<br />
. Potom je křivka M parametrizována bodovou funkcí<br />
1<br />
X<br />
u O xut<br />
zut<br />
, u I<br />
1<br />
3<br />
. (23)<br />
Rotaci vektorů t 1<br />
a t 2<br />
kolem osy o popisují vektorové funkce<br />
v<br />
1v cos vt1<br />
sin vt2<br />
, v2v sin<br />
vt1<br />
cos vt2<br />
, v 0,2<br />
. (24)<br />
Rotační plocha, která vznikne rotací křivky M kolem osy o, je parametrizována bodovou<br />
funkcí (23), ve které vektor t 1<br />
nahradíme vektorovou funkcí<br />
X , (25)<br />
v 1<br />
v<br />
z (24). Potom bodová funkce<br />
u<br />
v O xuv<br />
v zut<br />
O xucos<br />
v t xusin<br />
v t zut<br />
, u I,<br />
v 0,2<br />
,<br />
1 3<br />
1<br />
2 3<br />
<br />
je parametrizací rotační <strong>plochy</strong>.<br />
Nahradíme-li počátek O bodem S, pak (25) je parametrizací rotační <strong>plochy</strong> posunuté o průvodní<br />
vektor OS bodu S.<br />
40