KÅivky a plochy v E3
KÅivky a plochy v E3
KÅivky a plochy v E3

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Cvičení:<br />
2. Přímka je dána body<br />
a) M 5,0,0<br />
a V 0,0,10,<br />
b) M 3,4,0<br />
a V 0,0,10.<br />
Napište parametrické vyjádření části rotační <strong>plochy</strong>, která vznikne rotací úsečky MV kolem osy z.<br />
Nakreslete obrázek a porovnejte části ploch ze zadání a) a b).<br />
3. Přímka p je dána bodem M 4,0,0<br />
<br />
o<br />
, leží v rovině xz a její odchylka od osy x je 45 . Odvoďte<br />
parametrizaci rotační <strong>plochy</strong>, která vznikne rotací přímky p jednak kolem osy z a jednak kolem<br />
osy x.<br />
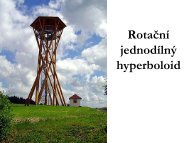
b) Rotační jednodílný hyperboloid<br />
Jestliže přímka je s osou rotace mimoběžná, pak její rotací dostaneme rotační jednodílný hyperboloid,<br />
který má opět parametrické vyjádření (20).<br />
p <br />
Příklad:<br />
Kolem osy o z rotuje přímka p, která je dána bodem A 2,0,0<br />
a směrovým vektorem<br />
0,1,2 , jak je zakresleno na obr. 3.16. Odvodíme parametrizaci rotační <strong>plochy</strong>.<br />
<br />
<br />
Obr. 3.16<br />
Řešení:<br />
Přímka je s osou rotace mimoběžná, a proto rotační plocha je jednodílný rotační hyperboloid. Z<br />
(20) dostaneme její parametrické vyjádření:<br />
x 2cos<br />
v usin<br />
v ,<br />
y 2sin<br />
v ucos<br />
v , (21)<br />
z 2u , u R, v 0,2<br />
.<br />
Pro u 6, 6 jsme plochu zobrazili na obr. 3.17.<br />
38