KÅivky a plochy v E3
KÅivky a plochy v E3
KÅivky a plochy v E3

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Odvodíme parametrizaci rotačního hyperboloidu:<br />
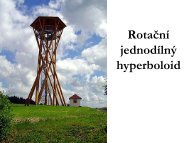
a) Jednodílný hyperboloid<br />
Jedna větev hyperboly, která leží v rovině xz (obr. 3.13), je parametrizována bodovou funkcí<br />
1 a<br />
<br />
X u<br />
O e1<br />
b tgu e3,<br />
u ,<br />
<br />
cosu<br />
2 2 .<br />
<br />
Rotuje-li větev hyperboly kolem osy z, dostaneme jednodílný hyperboloid, který je parametrizován<br />
bodovou funkcí<br />
a<br />
a a<br />
<br />
X u, v O cosv,sin<br />
v,0<br />
b tgu<br />
0,0,1<br />
cos , sin , tg , , ,<br />
0,2<br />
.<br />
cos<br />
v v b u<br />
cos cos u<br />
v (15)<br />
u<br />
u u 2 2 <br />
π π<br />
Pro volbu a 2, b 4,u<br />
, je plocha zobrazena na obr. 3.14.<br />
4 4<br />
Obr. 3.13 Obr. 3.14<br />
b) Dvojdílný hyperboloid<br />
Jedna část dvojdílného hyperboloidu vznikne rotací části hyperboly, která je parametrizována bodovou<br />
<br />
funkcí (15), ale u 0,<br />
, kolem osy x. Tato část je parametrizována bodovou funkcí<br />
2 <br />
a<br />
X u,<br />
v O 1,0,0<br />
<br />
b tgu<br />
0,cos<br />
v,sin<br />
v<br />
<br />
cos u<br />
(16)<br />
a<br />
<br />
<br />
<br />
, b tgusin<br />
v,<br />
b tgu<br />
cos v , 0, ,<br />
0,2<br />
.<br />
cos<br />
<br />
u v<br />
u<br />
2 <br />
Druhá část dvojdílného hyperboloidu vznikne rotací části hyperboly, která je parametrizována<br />
<br />
bodovou funkcí (15), kdy u , . Tato část hyperboloidu je parametrizována bodovou funkcí<br />
2<br />
<br />
(16), ale u <br />
, , v 0,2<br />
.<br />
2<br />
3<br />
Obě části <strong>plochy</strong> jsou pro volbu a 2, b 1,<br />
u 0, , , jsou zobrazeny na obr. 3.15.<br />
4 4<br />
36