KÅivky a plochy v E3
KÅivky a plochy v E3
KÅivky a plochy v E3

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
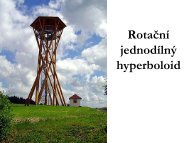
3.3 Rotační <strong>plochy</strong><br />
Rotace v prostoru je dána pevně zvolenou přímkou o – osou rotace. Rotační plocha vzniká rotací<br />
křivky M kolem osy o. Budeme předpokládat, že M je rovinná křivka a osa rotace leží v rovině<br />
křivky M.<br />
Parametrizace rotační <strong>plochy</strong>:<br />
<strong>plochy</strong>.<br />
Příklad:<br />
Rotační plocha vznikne rotací grafu M funkce<br />
4<br />
z , x<br />
R<br />
x<br />
<br />
, kolem osy z. Odvodíme parametrizaci<br />
Řešení:<br />
4 <br />
Graf funkce z , x<br />
R , je parametrizován bodovou funkcí<br />
x<br />
1<br />
4<br />
<br />
X u<br />
O u e1<br />
e3,<br />
u R . (12)<br />
u<br />
Vektory e 1<br />
a e 3<br />
tvoří ortonormální bázi roviny xz, ve které leží křivka M. Rotaci vektoru e 1<br />
kolem<br />
osy z popisuje vektorová funkce<br />
t v cosv,sin<br />
,0 , v 0,2<br />
. (13)<br />
<br />
1 v<br />
Parametrizaci rotační <strong>plochy</strong> dostaneme tak, že v (12) nahradíme vektor e 1<br />
vektorovou funkcí<br />
(13). Potom bodová funkce<br />
4<br />
4 <br />
4<br />
X u, v O u t1v<br />
<br />
e3<br />
O ucosv,sin<br />
v,0<br />
0,0,1<br />
u<br />
cosv,<br />
usin<br />
v,<br />
,<br />
u R , v<br />
0,2<br />
,<br />
u<br />
u <br />
u <br />
1<br />
je parametrizací <strong>plochy</strong>. Na obr. 3.11 jsme znázornili část této rotační <strong>plochy</strong> pro u , 2 .<br />
2<br />
Parametrické křivky pro u konst.<br />
jsou kružnice, které nazýváme rovnoběžkové kružnice, a<br />
parametrické křivky pro v konst.<br />
jsou křivky shodné s křivkou M, které nazýváme meridiány.<br />
Obr. 3.11<br />
34