

rama i kratownica - Instytut Konstrukcji Budowlanych
rama i kratownica - Instytut Konstrukcji Budowlanych
rama i kratownica - Instytut Konstrukcji Budowlanych

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
POLITECHNIKA POZNAŃSKA<br />
INSTYTUT KONSTRUKCJI BUDOWLANYCH<br />
ZAKŁAD MECHANIKI BUDOWLI<br />
Projekt wykonał:<br />
Krzysztof Wójtowicz<br />
Konsultacje:<br />
dr inż. Przemysław Litewka<br />
Obliczanie układów statycznie niewyznaczalnych<br />
metodą sił.<br />
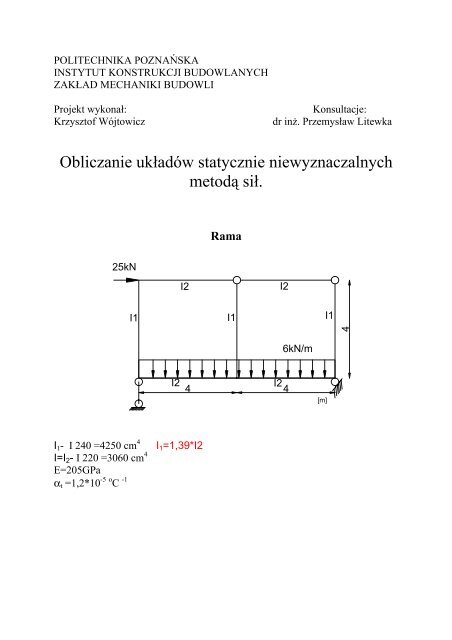
Rama<br />
25kN<br />
I2<br />
I2<br />
I1<br />
I1<br />
I1<br />
4<br />
6kN/m<br />
I2<br />
I2<br />
4 4<br />
[m]<br />
I 1 - I 240 =4250 cm 4<br />
I=I 2 - I 220 =3060 cm 4<br />
E=205GPa<br />
α t =1,2*10 -5 o C -1<br />
I 1 =1,39*I2
Układ podstawowy<br />
25kN<br />
X1<br />
X2<br />
X2<br />
X1<br />
4<br />
X3<br />
6kN/m<br />
4<br />
X3<br />
4<br />
[m]<br />
Warunki kinematycznej zgodności układu rzeczywistego z układem podstawowym<br />
⎧∆u<br />
= ul<br />
+ u p = 0 ⎧X1δ11<br />
+ X 2δ12<br />
+ X 3δ13<br />
+ ∆1P<br />
= 0<br />
⎪<br />
⎪<br />
⎨∆v<br />
= vl<br />
+ v p = 0 ⇒ ⎨X1δ<br />
21 + X 2δ<br />
22 + X 3δ<br />
23 + ∆2P<br />
= 0<br />
⎪<br />
⎪<br />
⎩<br />
∆ϕ = ϕd<br />
+ ϕ g = 0 ⎩X1δ<br />
31 + X 2δ32<br />
+ X 3δ33<br />
+ ∆3P<br />
= 0<br />
Stan „p”<br />
25kN<br />
I2<br />
I2<br />
I1<br />
I1<br />
I1<br />
4<br />
6kN/m<br />
a<br />
I2<br />
4 I2 4<br />
Va=11,5kN<br />
[m]<br />
b Hb=25kN<br />
Vb=36,5kN<br />
∑<br />
∑<br />
8 * V<br />
V<br />
b<br />
X :<br />
M<br />
a<br />
b<br />
H<br />
b<br />
: - V<br />
= 100 + 192<br />
= 36,5kN<br />
= 25kN<br />
b<br />
*8 + 25 * 4 + 6 *8 * 4<br />
∑<br />
8V<br />
V<br />
a<br />
M<br />
a<br />
b<br />
: V<br />
z<br />
= 192 −100<br />
= 11,5kN<br />
*8 + 25* 4 − 6*8* 4 = 0
Wykres momentów w stanie „p”<br />
Mp [kNm]<br />
100<br />
100<br />
98<br />
Stan X 1 =1 Wykres momentów w stanie X 1<br />
I2<br />
1=X1<br />
1=X1<br />
I2<br />
I1<br />
I1<br />
I1<br />
4<br />
M1 [m]<br />
Va=0<br />
I2<br />
4<br />
I2<br />
4<br />
Vb=0<br />
4<br />
Hb=0<br />
4<br />
4<br />
4<br />
Stan X 2 =1 Wykres momentów w stanie X 2<br />
I2<br />
X2=1<br />
I2<br />
4<br />
X2=1<br />
4<br />
I1<br />
I1<br />
I1<br />
4<br />
M2 [m]<br />
Va=0<br />
I2<br />
4<br />
I2<br />
4<br />
Vb=0<br />
Hb=0<br />
4<br />
4
Stan X 3 =1 Wykres momentów w stanie X 3<br />
I2<br />
I2<br />
I1 I1 I1<br />
4<br />
M3 [-]<br />
Va=0<br />
I2<br />
X3=1<br />
1=X3<br />
I2<br />
4 4<br />
Vb=0<br />
Hb=0<br />
1<br />
1<br />
1<br />
1<br />
δ<br />
=<br />
δ<br />
12 = δ21<br />
= ∫<br />
55,02<br />
EI<br />
2<br />
13 = δ31<br />
= ∫<br />
5,33<br />
= − −<br />
EI *1,39<br />
2<br />
δ23 = δ32<br />
= 0<br />
δ<br />
11<br />
158,7<br />
=<br />
EI<br />
δ<br />
=<br />
δ<br />
=<br />
22<br />
2<br />
M1*M2<br />
EI<br />
1<br />
dx = ( *4*4*4)*<br />
2<br />
1<br />
EI<br />
EI*[ δ ] = (m*m*m) + (m*m*m) = m<br />
M1* M3<br />
dx = -<br />
EI<br />
16<br />
EI<br />
2<br />
1<br />
(<br />
2<br />
19,83<br />
= −<br />
EI<br />
2<br />
1<br />
2<br />
* 4 * 4 * *1) *<br />
3<br />
M1* M1 1 2<br />
= ∫ dx = 2( * 4 * 4 * * 4) *<br />
EI 2 3<br />
88,71<br />
EI<br />
33<br />
= ∫<br />
2<br />
M2 * M2<br />
EI<br />
EI *[ δ ] =<br />
1<br />
EI<br />
1<br />
1<br />
+ ( *4*4*4)*<br />
2<br />
1<br />
EI<br />
1<br />
−<br />
3<br />
1<br />
EI<br />
(4 * 4 *1) *<br />
2<br />
-(m * m) - (m * m)<br />
+ (4 *8* 4) *<br />
EI *[δ ] = (m * m * m) + (m * m * m) = m<br />
dx =<br />
1 2<br />
2 * ( * 4 * 4 * * 4) *<br />
2 3<br />
M3* M3 1 2<br />
= ∫ dx = 2( *1* 4 * *1) *<br />
EI 2 3<br />
5,92<br />
EI<br />
2<br />
1<br />
EI<br />
2<br />
1<br />
EI<br />
EI *[ δ ] = (m * m * m) + (m * m * m) = m<br />
1<br />
EI<br />
EI * [δ ] = (m) + (m) = m<br />
1<br />
+<br />
3<br />
2<br />
(4 * 4 * 4) *<br />
+ (1* 4 *1) *<br />
1<br />
EI<br />
2<br />
32<br />
= +<br />
EI *1,39<br />
1<br />
EI<br />
2<br />
=<br />
2<br />
= m<br />
2<br />
2<br />
42,67<br />
= +<br />
EI *1,39<br />
1<br />
EI<br />
3<br />
1<br />
=<br />
2<br />
128<br />
EI<br />
42,67<br />
+<br />
EI EI<br />
2,67<br />
= +<br />
EI *1,39<br />
2<br />
4<br />
EI<br />
2<br />
2<br />
2<br />
32<br />
EI<br />
=<br />
2<br />
64<br />
=<br />
*1,39<br />
=
Mp * M1<br />
2<br />
1 2 1 1<br />
2 6 *8<br />
∆1P<br />
= ∫ dx = −(<br />
*100 * 4 * * 4) * − ( *100 *8* 4 + *<br />
EI 2 3 EI1<br />
2<br />
3 8<br />
533,33 2624 3007,69<br />
= − − = −<br />
EI 2 *1,39 EI 2 EI 2<br />
kN 2<br />
3<br />
EI *[∆ ] = (kNm * m * m) − (kNm * m * m + * m * m * m) = kNm<br />
m<br />
1<br />
*8* 4) *<br />
EI 2<br />
=<br />
∆ 2P = ∫<br />
1<br />
[<br />
2<br />
2<br />
* 4 * 4(<br />
3<br />
Mp * M2<br />
EI<br />
1<br />
1<br />
dx = −(<br />
*100 * 4 * 4) * −<br />
2<br />
EI1<br />
2<br />
1 2 6 * 4 1 1<br />
*100 + * 98) + * * 4 * * 4]*<br />
3 3 8 2 EI2<br />
800 858,67<br />
= − −<br />
EI2<br />
*1,39 EI2<br />
1434,21<br />
= −<br />
EI2<br />
kN 2<br />
EI *[ ∆ ] = (kNm * m * m) − [m * m(kNm + kNm) + * m * m * m] = kNm<br />
m<br />
3<br />
∆3P<br />
= ∫<br />
Mp * M3<br />
dx =<br />
EI<br />
1<br />
(<br />
2<br />
* 98 * 4 *1 +<br />
2<br />
2 6 * 4<br />
*<br />
3 8<br />
kN 2<br />
EI *[ ∆ ] = (kNm * m + * m * m) = kNm<br />
m<br />
2<br />
* 4 *1) *<br />
1<br />
EI<br />
2<br />
=<br />
228<br />
EI<br />
2<br />
Ms= M1+M2+M3<br />
Sprawdzenie globalne współczynników<br />
4<br />
4<br />
M s [kNm ]<br />
8<br />
8<br />
1<br />
4<br />
3<br />
3<br />
3<br />
∫<br />
MsMs<br />
dx =<br />
EI<br />
3<br />
3<br />
∑∑<br />
i= 1 k=<br />
1<br />
323,71<br />
=<br />
EI<br />
MsMs 1 2 1<br />
∫ dx = [ *4*4*( *4 + *8) +<br />
EI 2 3 3<br />
1 2 1 2<br />
+ [ *4*4* *4 + *4*4*( *4 +<br />
2 3 2 3<br />
δ<br />
ik<br />
1<br />
*8*4*(<br />
2<br />
1<br />
*8)<br />
3<br />
+<br />
1 2<br />
*4 + *8) +<br />
3 3<br />
2<br />
*8 +<br />
3<br />
1<br />
*8*4*(<br />
2<br />
1<br />
*1*4*<br />
2<br />
1<br />
*4)<br />
3<br />
2 1 2<br />
*1+<br />
*3*4* *3]*<br />
3 2 3 EI<br />
1 323,69<br />
+ 3*4*3]* =<br />
EI EI<br />
1<br />
*1,39<br />
+
Sprawdzenie wierszowe współczynników<br />
4<br />
Ms<br />
M1 [m]<br />
8<br />
1<br />
4<br />
3<br />
3<br />
3<br />
4<br />
4<br />
4<br />
4<br />
Ms * M1<br />
193,89<br />
∫ dx = δ11<br />
+ δ12<br />
+ δ13<br />
=<br />
EI<br />
EI<br />
Ms * M1 1<br />
2 1 2<br />
∫ dx = [ * 4 * 4 * (4 + * 4) + * 4 * 4 * * 3) *<br />
EI 2<br />
3 2 3 EI<br />
1<br />
1 193,89<br />
[4 * 4 * (4 + * 4) + 4 * 4 * 3]* =<br />
2<br />
EI EI<br />
1<br />
*1,39<br />
Sprawdzenie kolumnowe współczynników<br />
+<br />
4<br />
4<br />
8<br />
Ms [kNm]<br />
8<br />
1<br />
4<br />
3<br />
3<br />
3<br />
100<br />
100<br />
Mp [kNm]<br />
98<br />
∫<br />
∫<br />
Ms*Mp<br />
4213,9<br />
dx = ∆1P<br />
+ ∆ 2P + ∆3P<br />
= −<br />
EI<br />
EI<br />
Ms*Mp 1 2<br />
1 1 2 1 1<br />
dx = − *100*4*( *4 + 4)* −[<br />
*100*4*( *4 + 4) + *98*4*( *4 + 4) +<br />
EI 2 3 EI*1.39 2 3 2 2<br />
2<br />
*<br />
3<br />
6*4<br />
8<br />
2<br />
1<br />
*4*( *4 + 4) +<br />
2<br />
1<br />
*98*4*3<br />
2<br />
+<br />
2<br />
*<br />
3<br />
6*4<br />
8<br />
2<br />
1 4213,9<br />
*4*6]* = −<br />
EI EI
Obliczenie nadliczbowych<br />
⎪<br />
⎪<br />
⎪<br />
⎩<br />
⎪<br />
⎪<br />
⎪<br />
⎨<br />
⎧<br />
=<br />
+<br />
+<br />
−<br />
=<br />
−<br />
+<br />
=<br />
−<br />
−<br />
+<br />
2<br />
2<br />
2<br />
3<br />
2<br />
1<br />
2<br />
2<br />
2<br />
2<br />
2<br />
1<br />
2<br />
2<br />
2<br />
3<br />
2<br />
2<br />
2<br />
1<br />
*EI<br />
0 |<br />
EI<br />
228<br />
)<br />
EI<br />
5,92<br />
*(<br />
X<br />
)<br />
EI<br />
19,83<br />
*(<br />
X<br />
*EI<br />
0 |<br />
EI<br />
1434,2<br />
)<br />
EI<br />
88,71<br />
*(<br />
X<br />
)<br />
EI<br />
55,02<br />
*(<br />
X<br />
*EI<br />
0 |<br />
EI<br />
3007,7<br />
)<br />
EI<br />
19,83<br />
*(<br />
X<br />
)<br />
EI<br />
55,02<br />
*(<br />
X<br />
)<br />
EI<br />
158,7<br />
*(<br />
X<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
= −<br />
+<br />
−<br />
=<br />
+<br />
=<br />
−<br />
+<br />
228<br />
5,92*X<br />
19,83*X<br />
1434,2<br />
88,71*X<br />
55,02*X<br />
3007,7<br />
19,83X<br />
55,02*X<br />
158,7*X<br />
3<br />
1<br />
2<br />
1<br />
3<br />
2<br />
1<br />
⎪<br />
⎩<br />
⎪<br />
⎨<br />
⎧<br />
=<br />
=<br />
=<br />
kNm<br />
X<br />
kN<br />
X<br />
kN<br />
X<br />
39,51<br />
1,72<br />
23,29<br />
3<br />
2<br />
1<br />
[m]<br />
4<br />
4<br />
4<br />
39,51=X3<br />
39,51=X3<br />
X2=1,72<br />
X1=23,29<br />
X1=23,29<br />
25kN<br />
11,5<br />
36,5<br />
25<br />
6kN/m<br />
Wykres momentów dla układu rzeczywistego<br />
39,51 53,64<br />
53,64<br />
4,84<br />
44,35<br />
0,04<br />
0,04<br />
6,84<br />
6,84<br />
M[kNm]
Kontrola kinematyczna<br />
Do kontroli kinematycznej (zgodnie z twierdzeniem redukcyjnym) przyjmujemy nowy<br />
układ podstawowy i obliczamy przemieszczenie kątowe w punkcie „b”, które po<br />
wyliczeniu powinno wynieść „0”<br />
4<br />
M o<br />
Va=0<br />
4 4<br />
1<br />
b<br />
1<br />
Vb=0<br />
H b=0<br />
1 1<br />
1<br />
1<br />
1 2 1 2<br />
*1*4* *53,64 *1*4* *39,51<br />
ϕ =<br />
2 3<br />
−<br />
2 3<br />
+<br />
EI*1,39 EI*1,39<br />
51,45 − 37,9 + 107,28 − 88,7 − 32 0,13<br />
=<br />
= ≈ 0<br />
EI<br />
EI<br />
0,13<br />
*100%<br />
107,28<br />
= 0,12%<br />
−<br />
1* ϕ<br />
= ∑∫<br />
M *M<br />
dx = 0<br />
EI<br />
1<br />
*53,64 4*1* *44,35<br />
− 2 −<br />
EI<br />
EI<br />
1<br />
4*1*<br />
2<br />
Wykresy sił normalnych i poprzecznych dla układu rzeczywistego<br />
o<br />
2<br />
2 6*4<br />
* *4*1<br />
3 8<br />
=<br />
EI<br />
-23,29 -23,29<br />
-<br />
+<br />
N[kN]<br />
-1,72<br />
-13,41<br />
-<br />
-<br />
-13,41<br />
-1,72<br />
-<br />
1,71<br />
+<br />
13,22<br />
T[kN]<br />
-1,72<br />
+<br />
9,88<br />
+<br />
13,41<br />
-1,71<br />
-<br />
-1,72<br />
-<br />
-1,71<br />
-11,59 -11,59<br />
1,71<br />
+<br />
-<br />
-10,78<br />
9,88<br />
-<br />
13,41<br />
-12,5<br />
-36,5
Dla miejsca zerowego siły poprzecznej znajdujemy wartość max. momentów.<br />
T(x) = −6x<br />
+ 13,22 = 0 ⇒ x = 2,2m<br />
M(x) = -6x<br />
M(2,2) = 14,52kNm<br />
2<br />
+ 13,22x − 0,04<br />
6,84<br />
6,84<br />
M[kNm]<br />
53,64<br />
0,04<br />
0,04<br />
39,51 53,64<br />
4,84<br />
14,52<br />
44,35
Obciążenie zmianą temperatury<br />
tm=+25°C<br />
+20°C<br />
I2<br />
I2<br />
+20°C<br />
I1<br />
+15°C<br />
I1<br />
+15°C<br />
I1<br />
4<br />
+20°C<br />
I2<br />
4<br />
K<br />
-5°C<br />
4<br />
I2<br />
[m]<br />
I1- I 240 =4250 cm 4<br />
I2- I 220 =3060 cm 4 Układ podstawowy<br />
X2<br />
X1<br />
X2 X1<br />
+20°C<br />
+20°C<br />
+15°C<br />
+15°C<br />
4<br />
+20°C<br />
a<br />
Va<br />
4<br />
X3<br />
X3<br />
-5°C<br />
4<br />
[m]<br />
b<br />
Vb<br />
Hb<br />
Warunki kinematycznej zgodności układu rzeczywistego z układem podstawowym<br />
⎧∆u<br />
= ul<br />
+ u p = 0 ⎧X1δ11<br />
+ X 2δ12<br />
+ X 3δ13<br />
+ ∆1P<br />
= 0<br />
⎪<br />
⎪<br />
⎨∆v<br />
= vl<br />
+ v p = 0 ⇒ ⎨X1δ<br />
21 + X 2δ<br />
22 + X 3δ<br />
23 + ∆2P<br />
= 0<br />
⎪<br />
⎪<br />
⎩<br />
∆ϕ = ϕd<br />
+ ϕ g = 0 ⎩X1δ<br />
31 + X 2δ32<br />
+ X 3δ33<br />
+ ∆3P<br />
= 0<br />
tm=+25°C<br />
to= -7,5°C<br />
+20°C<br />
|∆t|=5°C<br />
+20°C<br />
to= -7,5°C |∆ t|=5°C<br />
+15°C<br />
to= -10°C |∆t|=0<br />
+15°C<br />
to= -7,5°C |∆t|=5°C<br />
4<br />
+20°C<br />
to= -20°C |∆t|=20°C<br />
4<br />
-5°C<br />
4<br />
[m]
Stan X 1 =1 Wykres sił normalnych w stanie X 1<br />
1=X1<br />
1=X1<br />
-1<br />
-<br />
-<br />
-1 -1<br />
-1<br />
4<br />
N1[-]<br />
Va=0<br />
4<br />
4<br />
Hb=0<br />
Vb=0<br />
1<br />
+<br />
1 1<br />
+<br />
1<br />
Stan X 2 =1 Wykres sił normalnych w stanie X 2<br />
X2=1<br />
1<br />
-1<br />
X2=1<br />
4<br />
+<br />
N2[-]<br />
-<br />
Va=0<br />
4<br />
4<br />
Vb=0<br />
H b=0<br />
1<br />
-1<br />
Stan X 3 =1 Wykres sił normalnych w stanie X 3<br />
4<br />
N3[1/m]<br />
+<br />
0,25 0,25<br />
Va=0<br />
X3=1<br />
1=X3<br />
4 4<br />
Vb=0<br />
Hb=0<br />
-0,25<br />
-<br />
-0,25
Do obliczenia sił nadliczbowych od obciążeń spowodowanych zmianą temperatury został<br />
przyjęty układ podstawowy identyczny jak w przypadku obliczeń od obciążeń zewnętrznych,<br />
dlatego współczynniki δ 11 , δ<br />
22,<br />
δ33,<br />
δ12,<br />
δ13,<br />
δ 23 nie zmieniają swej wartości. Obliczamy tylko<br />
przemieszczenia po kierunku X1,X2,X3 ( ∆ 1 P , ∆2P<br />
, ∆3P<br />
) spowodowane zmianą temperatury.<br />
−<br />
−<br />
∆t<br />
∆iP<br />
= ∑∫ N α t t odx<br />
+ Miα<br />
t dx<br />
i<br />
∑∫<br />
h<br />
1<br />
*4*4*5<br />
−5<br />
4*8*20<br />
∆<br />
2<br />
1P = 1,2*10 [( −1*(<br />
−7,5)*8<br />
+ 1*( −20)*8)<br />
+ ( − *2 + )] = 0,02971[m]<br />
0,24 0,22<br />
1 1<br />
*4*4*5 *4*4*20<br />
−5<br />
2 2<br />
4*4*5<br />
∆2P = 1,2*10 [(1*4*( −7,5)<br />
+ ( −1)*4*(<br />
−10))<br />
+ ( − +<br />
− )] = 0,00267 [m]<br />
0,22 0,22 0,24<br />
1<br />
*1*4*5<br />
−5<br />
2 1*4*20<br />
∆3P=<br />
1,2*10 [(0,25*4*( −7,5)<br />
+ ( −0,25)*4*(<br />
−20)<br />
+ ( − )] = −0,00371[-]<br />
0,24 0,22<br />
2<br />
6 kN<br />
−8<br />
4<br />
2<br />
EI=EI 2 = 205GPa *3060cm = 205*10 *3060*10 m = 6273kNm<br />
2<br />
m<br />
⎧<br />
⎪X<br />
⎪<br />
⎪<br />
⎨<br />
⎪<br />
⎪<br />
⎪<br />
⎩<br />
1<br />
2<br />
2<br />
Obliczenia nadliczbowych<br />
158,7 55,02 19,83<br />
*( ) + X 2 *( ) − X3<br />
*( ) + 0,02971 = 0 | *EI<br />
EI2<br />
EI2<br />
EI2<br />
55,02 88,71<br />
X1<br />
*( ) + X 2 *( ) + 0,00267 = 0 | *EI2<br />
EI2<br />
EI2<br />
19,83 5,92<br />
− X1<br />
*( ) + X3<br />
*( ) − 0,00371 = 0 | *EI2<br />
EI EI<br />
⎧X1<br />
*(158,7) + X 2 *(55,02) − X3<br />
*(19,83) + 0,02971*6273 = 0<br />
⎪<br />
⎨ X1<br />
*(55,02) + X 2 *(88,71) + 0,00267*6273 = 0<br />
⎪<br />
⎩ − X1<br />
*(19,83) + X3<br />
*(5,92) − 0,00371*6273 = 0<br />
⎧158,7*X1<br />
+ 55,02*X 2 −19,83X3<br />
= -186,371<br />
⎪<br />
⎨ 55,02*X1<br />
+ 88,71*X 2 = −16,75<br />
⎪<br />
⎩ −19,83*X1<br />
+ 5,92*X3<br />
= 23,273<br />
⎧ X1 = −1,686 kN<br />
⎪<br />
⎨ X 2 = 0,857 kN<br />
⎪<br />
⎩X3<br />
= −1,715 kNm<br />
2
X1=1,686<br />
X1=1,686<br />
X2=0,857<br />
X2=0,857<br />
4<br />
X3=1,715<br />
Hb=0<br />
Va=0<br />
4<br />
X3=1,715<br />
4<br />
[m]<br />
Vb=0<br />
Wykres momentów od zmiany temperatury<br />
3,428<br />
3,428<br />
M[kNm]<br />
3,316<br />
3,316<br />
5,029<br />
6,744<br />
1,715<br />
5,029<br />
5,029<br />
Kontrola kinematyczna<br />
Do kontroli kinematycznej (zgodnie z twierdzeniem redukcyjnym) przyjmujemy nowy<br />
układ podstawowy i obliczamy wzajemne przemieszczenie kątowe w punkcie „a”, które po<br />
obliczeniu powinno wynieść „0”<br />
4<br />
M<br />
1<br />
a<br />
1<br />
Va=0<br />
4 4<br />
Hb=0<br />
Vb=0<br />
1 1<br />
1 1
-0,25<br />
-<br />
N[1/m]<br />
-0,25<br />
0,25<br />
+<br />
0,25<br />
3,428<br />
Wykres momentów od zmiany temperatury<br />
3,428<br />
M[kNm]<br />
3,316<br />
3,316<br />
5,029<br />
6,744<br />
1,715<br />
5,029<br />
5,029<br />
ϕ = [<br />
1<br />
2<br />
20<br />
1*4*<br />
0,22<br />
*1*4*( −<br />
−<br />
1* ϕ =<br />
2<br />
*3,316<br />
3<br />
+<br />
_<br />
M *M<br />
EI<br />
1<br />
*3,428)<br />
3<br />
∑∫<br />
dx +<br />
−<br />
∑∫<br />
1<br />
*1*4*<br />
2<br />
_<br />
M αt<br />
∆t<br />
h<br />
dx +<br />
2<br />
*1,715]*<br />
3<br />
∑∫<br />
1<br />
6273*1,39<br />
(3,316 + 6,744)<br />
+ ( −0,25)*4*(<br />
−7,5)<br />
+ 0,25*4*( −20)]<br />
+ [ −<br />
2<br />
_<br />
Nαttodx<br />
= 0<br />
−5<br />
1 5<br />
+ 1,2*10 *[ − *1*4* +<br />
2 0,24<br />
1<br />
*4*1]<br />
6273<br />
Wykresy sił normalnych oraz poprzecznych spowodowanych zmianą temperatury<br />
−7<br />
= −9,778*10<br />
rad ≈ 0<br />
0,857<br />
1,686<br />
+<br />
1,686<br />
1,257<br />
+<br />
-0,857<br />
1,257<br />
1,686<br />
-0,857<br />
-<br />
-0,857<br />
-0,429<br />
-1,275<br />
+<br />
N[kN] -<br />
+<br />
T[kN]<br />
-<br />
-<br />
0,857<br />
-1,686 -1,686<br />
-1,257 -1,257<br />
-<br />
-<br />
-0,857<br />
1,686<br />
0,857<br />
+<br />
0,857<br />
-0,429<br />
-1,275
Przemieszczenie pionowe punktu K od temperatury<br />
Przyjmujemy dowolny układ podstawowy ( zgodnie z twierdzeniem redukcyjnym) i<br />
obliczamy przemieszczenie w pkt. K<br />
I2<br />
I2<br />
I1<br />
I1<br />
I1<br />
4<br />
M[m]<br />
V a = 0 ,5<br />
I2<br />
K I2<br />
4 1 4<br />
H b = 0<br />
V b = 0 ,5<br />
2<br />
Wykres momentów od zmiany temperatury<br />
3,428<br />
3,428<br />
M[kNm]<br />
3,316<br />
3,316<br />
5,029<br />
6,744<br />
1,715<br />
5,029<br />
5,029<br />
δ<br />
t<br />
= [<br />
1<br />
2<br />
2<br />
* 2* 4*( *6,744 +<br />
3<br />
1<br />
*3,316)<br />
3<br />
+<br />
1<br />
2<br />
* 2* 4*5,029]*<br />
1<br />
EI<br />
−<br />
1 20<br />
( * 2* 4* *1,2*10<br />
2 0,22<br />
−5<br />
) * 2 = −0,004092[m]<br />
Przemieszczenie pionowe punktu K od obciążenia zewnętrznego<br />
Do obliczenia przemieszczenia od sił zewnętrznych posłużymy się tym samym układem<br />
podstawowym, co powyżej.<br />
6,84<br />
6,84<br />
M[kNm]<br />
53,64<br />
0,04<br />
0,04<br />
39,51<br />
14,52<br />
4,84<br />
53,64<br />
44,35<br />
δ = [<br />
P<br />
1<br />
2<br />
1<br />
* 2* 4*( *0,04 +<br />
3<br />
2<br />
2 6* 4<br />
+ *<br />
3 8<br />
1<br />
* 4*<br />
2<br />
* 2]*<br />
1<br />
EI<br />
2<br />
3<br />
* 4,84) +<br />
= 0,01972[m]<br />
2<br />
2 6* 4<br />
*<br />
3 8<br />
1<br />
* 4*<br />
2<br />
* 2 +<br />
1 2<br />
* 2* 4*(<br />
2 3<br />
* 44,35 −<br />
1<br />
*53,64)<br />
3<br />
+
Kratownica<br />
G − 1EA D -1EA K -1,5EA S -1,5EA α = 45 sinα<br />
= cosα<br />
= 0, 707<br />
o<br />
20 kN<br />
30 kN<br />
1 2 3 4<br />
7<br />
5,66<br />
α=45°<br />
5<br />
6<br />
α=45°<br />
8<br />
9 10<br />
α=45°<br />
11 12<br />
α=45°<br />
13<br />
4<br />
14 15 16 17<br />
4x4<br />
SSN=2<br />
Układ podstawowy<br />
20 kN<br />
30 kN<br />
X2<br />
A<br />
B<br />
X2<br />
4<br />
C<br />
4x4<br />
X1<br />
Warunki kinematycznej zgodności układu rzeczywistego z układem podstawowym<br />
⎧Vc<br />
= 0 ⎧δ11X1+<br />
δ12X2<br />
+ ∆1P<br />
= 0<br />
⎨ ⇒ ⎨<br />
⎩∆AB<br />
= 0 ⎩δ21X1+<br />
δ22X2<br />
+ ∆2P<br />
= 0
Stan „P”<br />
20 kN 30 kN<br />
1 2 3 4<br />
5 6 9<br />
8<br />
10<br />
11<br />
12 13<br />
4<br />
45°<br />
14 15 16 17<br />
4x4<br />
*w przypadku, gdy pręt 7 nie jest obciążony siłą X2 wartość siły normalnej w tym pręcie wynosi „0” i nie<br />
uwzględniamy tego pręta na rysunku<br />
Np [kN]<br />
140<br />
90<br />
60<br />
30<br />
70,72<br />
30 30 30<br />
42,433<br />
42,433<br />
42,433<br />
90<br />
60<br />
30<br />
Stan X 1 =1<br />
1 2 3 4<br />
X1=1<br />
7<br />
5 6<br />
7<br />
8 9<br />
11<br />
X1=1<br />
10<br />
12<br />
13<br />
4<br />
14 15 16 17<br />
4x4
0,707<br />
N1 [-]<br />
0,707<br />
1<br />
1<br />
0,707<br />
0,707<br />
Stan X 2 =1<br />
1 2 3 4<br />
5<br />
6<br />
8<br />
9<br />
10<br />
11<br />
12 13<br />
4<br />
14 15 16 17<br />
4x4<br />
X2=1<br />
N2 [-]<br />
3 2 1<br />
1,414<br />
1<br />
1,414<br />
1 1<br />
1,414<br />
2 1
Tabela z obliczeniami współczynników δ 11,δ22,δ12<br />
= δ21,∆1P<br />
, ∆2P<br />
, zestawienie sił<br />
normalnych dla układu rzeczywistego w poszczególnych prętach oraz kontrola kinematyczna.<br />
*kreska w tabeli oznacza wartość równą „0”<br />
1 2 3 4 5 6 7 8 9 10 11 12 13<br />
Lp.<br />
L (N1N1)L (N2N2)L (N1N2)L (N1Np)L (N2Np)L N(H)[-] dla N*N(H)*L<br />
Np [kN] N1 [-] N2 [-]<br />
N [kN]<br />
EA EA EA EA EA EA H1=1 EA<br />
1 4 140 0 -3 - 36,000 - - -1680,000 4,319 0,999 17,259<br />
2 4 90 0,707 -2 1,999 16,000 -5,656 254,520 -720,000 8,584 0,666 22,867<br />
3 4 60 0 -1 - 4,000 - - -240,000 14,773 0,333 19,678<br />
4 4 30 0 0 - - - - - 30,000 0 -<br />
5 3,8 -70,721 0 1,414 - 7,544 - - -377,331 -6,770 -0,471 12,032<br />
6 2,7 30 0,707 -1 1,333 2,667 -1,885 56,560 -80,000 -6,189 0,333 -5,496<br />
7 3,8 0 -1 0 3,773 - - - - -12,783 0 -<br />
8 3,8 -42,433 -1 1,414 3,773 7,544 -5,335 160,114 -226,401 8,735 -0,471 -15,524<br />
9 2,7 30 0,707 -1 1,333 2,667 -1,885 56,560 -80,000 -6,189 0,333 -5,496<br />
10 3,8 -42,433 0 1,414 - 7,544 - - -226,401 21,518 -0,471 -38,243<br />
11 2,7 30 0 -1 - 2,667 - - -80,000 -15,227 0,333 -13,522<br />
12 3,8 -42,433 0 0 - - - - - -42,433 0 -<br />
13 2,7 0 0 0 - - - - - 0,000 0 -<br />
14 4 -90 0 2 - 16,000 - - -720,000 0,454 -0,666 -1,209<br />
15 4 -60 0,707 1 1,999 4,000 2,828 -169,680 -240,000 -5,735 -0,333 7,640<br />
16 4 -30 0 0 - - - - - -30,000 0 -<br />
17 4 0 0 0 - - - - - 0,000 0 -<br />
δ=<br />
14,211 106,633 -11,934 358,074 -4670,133 -0,016<br />
EA EA EA EA EA EA<br />
*kolumna 1 zawiera zestawienie numeracji prętów<br />
* w kolumnie 2 dla prętów o sztywności EA (1-4 oraz 14-17) została podana długość prętów<br />
natomiast dla prętów o sztywności 1,5EA (5-13) długość prętów została podzielona przez 1,5 w celu<br />
ujednolicenia sztywności.<br />
*Kolumna 3-5 zawiera zestawienie sił normalnych dal poszczególnych stanów<br />
*Ostatni wiersz kolumn 6-10 zawiera obliczone współczynniki δ 11,δ22,δ12<br />
= δ21,∆1P<br />
, ∆2P<br />
N N<br />
N N<br />
obliczone ze wzoru δ<br />
i ⋅ k<br />
L ; ∆<br />
i ⋅ P<br />
ik = ∑ ⋅ iP = ∑ ⋅L<br />
EA<br />
EA<br />
*Kolumna 11 zawiera zestawienie sił normalnych dla układu rzeczywistego<br />
*Kolumna 12 zestawienie sił normalnych N(H) powstałych od siły H1=1 (patrz poniżej „Kontrola<br />
kinematyczna”)<br />
*Wiersz ostatni kolumny 13 – przemieszczenie punktu A (patrz poniżej „Kontrola kinematyczna”)<br />
Po podstawieniu wartości z tabeli do równań kinematycznej zgodności otrzymujemy<br />
⎧14,211<br />
11,934 358,074<br />
⎪<br />
X1−<br />
X2 + = 0<br />
EA EA EA<br />
⎨<br />
⎪ 11,934 106,633 4670,133<br />
− X1+<br />
X2 − = 0<br />
⎩ EA EA EA<br />
| *EA<br />
| *EA<br />
⎧14,211X1−11,934X2<br />
= −358,074<br />
⎧X1<br />
= 12,783 kN<br />
⎨<br />
⇒ ⎨<br />
⎩−11,934X1+<br />
106,633X2 = 4670,133 ⎩X2<br />
= 45,227 kN<br />
Obliczenia sił normalnych w kratownicy zostały przedstawione w tabeli powyżej (kol.11)<br />
Do obliczenia sił posłużono się zasadą superpozycji korzystając ze wzoru:<br />
= Np + X ⋅ N1 + X N2<br />
N 1 2 ⋅
Wykres sił normalnych dla układu rzeczywistego<br />
20 kN<br />
N[kN]<br />
30 kN<br />
4,319<br />
8,584<br />
14,733<br />
30<br />
6,770<br />
6,189<br />
8,735<br />
6,189<br />
21,518<br />
15,227<br />
42,433<br />
12,783<br />
0,454<br />
5,735<br />
30<br />
X2=45,227<br />
Kontrola kinematyczna<br />
Przyjmujemy nowy układ podstawowy (zgodnie z tw. redukcyjnym).<br />
20 kN 30 kN<br />
H1<br />
A<br />
1 2 3 4<br />
X1<br />
7<br />
6<br />
8<br />
5<br />
7<br />
X1<br />
4x4<br />
9<br />
11<br />
10<br />
12 13<br />
14 15 16 17<br />
4<br />
Obliczamy przemieszczenie po kierunku H(A) , które w naszym przypadku powinno<br />
wynieść „0”<br />
δ A<br />
= 0
Stan H1=1<br />
1 2 3 4<br />
5<br />
6<br />
8<br />
9<br />
10 11<br />
12 13<br />
H1=1 A<br />
14 15 16 17<br />
0,333 kN<br />
Wykres sił normalnych od H1=1<br />
N(H) [-]<br />
0,999<br />
0,666<br />
0,333<br />
0,471<br />
0,333<br />
0,471<br />
0,333<br />
0,471<br />
0,333<br />
A<br />
0,666<br />
0,333<br />
Zgodnie z zasada pracy wirtualnej oraz twierdzeniem redukcyjnym nasze przemieszczenie<br />
obliczamy ze wzoru;<br />
N ⋅ N(H)<br />
δ A = ∑ ⋅L<br />
EA<br />
Obliczenia zamieszczono w tabelce powyżej.<br />
0,016<br />
Wartość obliczonego przemieszczenia wynosi δ A = − , co stanowi błąd rzędu 0,04%,<br />
EA<br />
zatem możemy przyjąć, że nasze przemieszczenie jest równe „0”














