Zbirka rijesenih zadataka - PBF - Sveučilište u Zagrebu
Zbirka rijesenih zadataka - PBF - Sveučilište u Zagrebu Zbirka rijesenih zadataka - PBF - Sveučilište u Zagrebu
Ž. Kurtanjek: PBF Mjerenja i automatizacija 2007/2008 28 Zadatak 12 Na slici je prikazan standardni regulacijski krug s negativnom povratnom vezom. Na proces djeluju dvije ulazne veličine X P1 i X P2 . Prva ulazna procesna veličina X P1 je promjenljiva i njezina promjena je poremećaj koji se kompenzira djelovanjem regulatora. Druga ulazna procesna veličina X P2 je podesiva (mainpulativna) i ona se podešava djelovanjem regulatora. Na sustav takoñer djeluje i ulazna informacijska veličina X I koja je informacija o referentnoj vrijednosti izlazne veličine Y R . Dinamika procesa je odreñena sa dvije prijenosne funkcije W P1 i W P2 , a regulacijski krug ima slijedeće prijenosne funkcije: W M za mjerni sustav, W R je prijenosna funkcija regulatora, a izvršni sustav ima prijenosnu funkciju W I . X P1 WP 1 + Y + + WP 2 X P2 - X I W I W M + W R - Zadaci: a) Odredite prijenosne funkcije sustava W 1 , W 2 i W 3 za tri ulazne veličine, dvije procesne i jednu ulaznu veličinu. b) Zadane su prijenosne funkcije mjernog i izvršnog sustava, W M =1 i W I =1. Prijenosne funkcije procesa su prvog stupnja, k1 k2 WP 1 = WP2 = . Odredite kako polovi prijenosne funkcije τ 1 ⋅ s + 1 τ 2 ⋅ s + 1 W 1 za poremećaj X P1 i za W 3 ulaznu informacijsku veličini X I zavisi o pojačanju regulatora, W R =k R , za slijedeće vrijednosti vrijednosti parametara procesa k 1 = 1, τ 1 = 2, k 2 = 0,5 i τ 2 = 1. c) Odredite promjenu izlazne veličine za pojačanje regulatora k R =2 pobuñenu trenutačnim impulsnim poremećajem prve ulazne veličine x P1 =δ(t). d) Odredite promjenu izlazne veličine za pojačanje regulatora k R =2 pobuñenu trenutačnim impulsnim poremećajem informacijske ulazne veličine X I =δ(t).
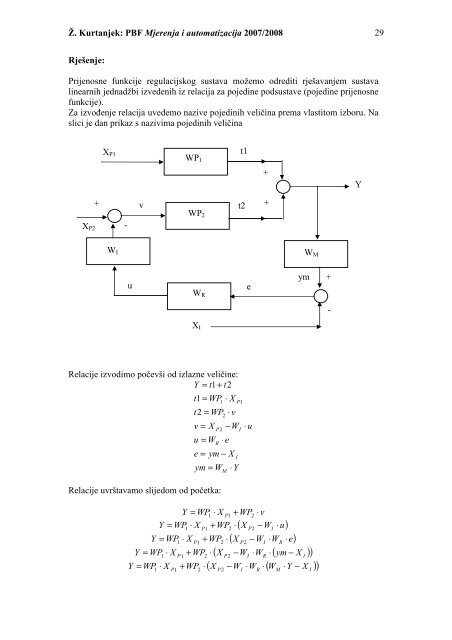
Ž. Kurtanjek: PBF Mjerenja i automatizacija 2007/2008 29 Rješenje: Prijenosne funkcije regulacijskog sustava možemo odrediti rješavanjem sustava linearnih jednadžbi izvedenih iz relacija za pojedine podsustave (pojedine prijenosne funkcije). Za izvoñenje relacija uvedemo nazive pojedinih veličina prema vlastitom izboru. Na slici je dan prikaz s nazivima pojedinih veličina X P1 t1 WP 1 + Y + v t2 + WP 2 X P2 - X I W M u W I + W R e ym - Relacije izvodimo počevši od izlazne veličine: Y = t1 + t2 t1 = WP ⋅ X t2 = WP ⋅ v v = X u = W P2 R 1 e = ym − X ym = W Relacije uvrštavamo slijedom od početka: Y 2 −W ⋅ e M P1 I ⋅Y I ⋅ u Y = WP1 ⋅ X P1 + WP2 ⋅ v WP ⋅ X + WP ⋅ X −W Y = 1 P1 2 Y = WP1 ⋅ X P + 1 2 = WP1 ⋅ X P + WP 1 2 2 = WP1 ⋅ X P + WP ⋅ 1 2 P2 I R Y 2 ( P I ⋅ u) WP2 ⋅ ( X P −WI ⋅WR ⋅ e) ⋅ ( X P −WI ⋅WR ⋅ ( ym − X I )) ( X −W ⋅W ⋅ ( W ⋅Y − X )) M I
- Page 1 and 2: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 3 and 4: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 5 and 6: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 7 and 8: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 9 and 10: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 11 and 12: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 13 and 14: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 15 and 16: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 17 and 18: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 19 and 20: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 21 and 22: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 23 and 24: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 25 and 26: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 27: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 31 and 32: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 33 and 34: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 35 and 36: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 37 and 38: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 39 and 40: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 41 and 42: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 43 and 44: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 45 and 46: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 47 and 48: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 49 and 50: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 51 and 52: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 53 and 54: Ž. Kurtanjek: PBF Mjerenja i autom
- Page 55: Ž. Kurtanjek: PBF Mjerenja i autom
Ž. Kurtanjek: <strong>PBF</strong> Mjerenja i automatizacija 2007/2008 29<br />
Rješenje:<br />
Prijenosne funkcije regulacijskog sustava možemo odrediti rješavanjem sustava<br />
linearnih jednadžbi izvedenih iz relacija za pojedine podsustave (pojedine prijenosne<br />
funkcije).<br />
Za izvoñenje relacija uvedemo nazive pojedinih veličina prema vlastitom izboru. Na<br />
slici je dan prikaz s nazivima pojedinih veličina<br />
X P1<br />
t1<br />
WP 1<br />
+<br />
Y<br />
+ v<br />
t2 +<br />
WP 2<br />
X P2 -<br />
X I<br />
W M<br />
u<br />
W I<br />
+<br />
W R<br />
e<br />
ym<br />
-<br />
Relacije izvodimo počevši od izlazne veličine:<br />
Y = t1<br />
+ t2<br />
t1<br />
= WP ⋅ X<br />
t2<br />
= WP ⋅ v<br />
v = X<br />
u = W<br />
P2<br />
R<br />
1<br />
e = ym − X<br />
ym = W<br />
Relacije uvrštavamo slijedom od početka:<br />
Y<br />
2<br />
−W<br />
⋅ e<br />
M<br />
P1<br />
I<br />
⋅Y<br />
I<br />
⋅ u<br />
Y = WP1<br />
⋅ X<br />
P1<br />
+ WP2<br />
⋅ v<br />
WP ⋅ X + WP ⋅ X −W<br />
Y =<br />
1 P1<br />
2<br />
Y = WP1<br />
⋅ X<br />
P<br />
+<br />
1<br />
2<br />
= WP1<br />
⋅ X<br />
P<br />
+ WP<br />
1 2 2<br />
= WP1<br />
⋅ X<br />
P<br />
+ WP ⋅<br />
1 2 P2<br />
I R<br />
Y<br />
2<br />
(<br />
P I<br />
⋅ u)<br />
WP2<br />
⋅ ( X<br />
P<br />
−WI<br />
⋅WR<br />
⋅ e)<br />
⋅ ( X<br />
P<br />
−WI<br />
⋅WR<br />
⋅ ( ym − X<br />
I<br />
))<br />
( X −W<br />
⋅W<br />
⋅ ( W ⋅Y<br />
− X ))<br />
M<br />
I


