M - Katedra vozidel a motorů
M - Katedra vozidel a motorů
M - Katedra vozidel a motorů

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
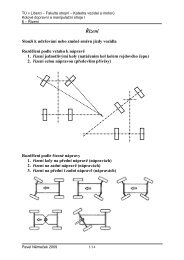
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + diferenciál<br />
M = F r = +<br />
P<br />
L<br />
KP<br />
M = F r = +<br />
KL<br />
M<br />
P<br />
< M L<br />
X<br />
X<br />
P<br />
L<br />
−<br />
−<br />
M<br />
r<br />
r<br />
d<br />
M<br />
d<br />
P<br />
L<br />
d<br />
d<br />
= O<br />
= O<br />
fP<br />
fL<br />
=<br />
=<br />
( X P<br />
O fP<br />
) r d<br />
( X L<br />
O fL<br />
) r d<br />
M<br />
M<br />
P<br />
L<br />
− M<br />
rd<br />
− M<br />
r<br />
d<br />
fP<br />
fL<br />
M<br />
M<br />
P<br />
L<br />
= F<br />
= F<br />
KP<br />
KL<br />
M<br />
P<br />
> M L<br />
X<br />
X<br />
P<br />
L<br />
−<br />
−<br />
M<br />
r<br />
r<br />
d<br />
M<br />
d<br />
P<br />
L<br />
r<br />
r<br />
d<br />
d<br />
= O<br />
= O<br />
fP<br />
fL<br />
=<br />
=<br />
=<br />
=<br />
( X P<br />
− O fP<br />
) r d<br />
( X L<br />
− O fL<br />
) r d<br />
M<br />
M<br />
P<br />
L<br />
+ M<br />
rd<br />
+ M<br />
r<br />
Rovnováha M k podélné ose vozidla<br />
X = X L<br />
+ X P<br />
1<br />
ΔM<br />
= X. Δ = B X L<br />
− X P<br />
2<br />
B XL<br />
− XP<br />
Δ =<br />
2X<br />
d<br />
fP<br />
fL<br />
Při pomalé jízdě zatáčkou, kdy X L není omezeno adhezí při symetrickém<br />
diferenciálu i R = -1 bude :<br />
ΔM<br />
=<br />
MR<br />
B 1− η<br />
.<br />
2 r 1+ η<br />
d<br />
R<br />
R<br />
Pavel Němeček 2009 26/30