M - Katedra vozidel a motorů
M - Katedra vozidel a motorů
M - Katedra vozidel a motorů

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
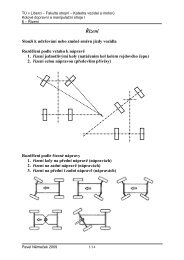
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Rozvodovky<br />
Konstrukčně nenahraditelná, propojuje převodovku a rozvodovku<br />
Je konstantním činitelem v celkovém převodovém poměru HÚ<br />
Složení :<br />
- skříň rozvodovky<br />
- stálý převod<br />
- diferenciál<br />
Skříň rozvodovky :<br />
- u tuhých náprav součástí mostu hnací nápravy<br />
- u dělených náprav spojena s karoserií nebo součástí uzlu M + o P + R<br />
Stálý převod<br />
Uspořádání soukolí :<br />
- kuželové soukolí (u klasického uspořádání s motorem podélně)<br />
- čelní soukolí u uspořádání s motorem napříč<br />
Účel :<br />
spolu se o P realizovat potřebný převod pro pohon vozidla<br />
Rozdělení podle počtu stupňů :<br />
- Jednostupňové rozvodovky<br />
- Dvoustupňové rozvodovky<br />
Jednostupňové rozvodovky (jednoduché stálé převody)<br />
i = 3,5 ÷ 4 – osobní automobily<br />
i > 6 - nákladní automobily<br />
kuželové soukolí<br />
- přímé zuby (hlučné, nízká životnost, citlivé na montáž a tolerance, menší<br />
axiální síly, nízké obvodové rychlosti)<br />
- zakřivené zuby (nehlučný chod, menší citlivost na nepřesnost výroby a<br />
montáže, vyšší hodnoty převodu, vyšší obvodové rychlosti, vyšší axiální síly)<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Ozubené soukolí rozvodovky<br />
- trvale v záběru na všech převodových stupních ⇒ velký rozsah momentů a<br />
otáček ⇒ nároky na životnost<br />
- požadavek na malé rozměry<br />
- požadavek nízkého hluku a vibrací<br />
- požadavek na vysokou účinnost<br />
Spirální zuby – křivka zubu<br />
• kružnice (Gleason)<br />
• evolventa (Klingelberg)<br />
• epicykloida (Spiromatic)<br />
Hypoidní kola<br />
• umožňují vyosení kola<br />
- max. 0,2 D – osobní vozy<br />
- max. 0,1 D – nákladní vozy<br />
Výhody<br />
- snížení výstupu kloubového hřídele<br />
- zvýšení převodu<br />
Při stejném průměru talířového kola se zvětšuje pastorek ⇒ silnější zuby ⇒<br />
lze jich použít méně. Vyosováním se zvětšuje stoupání šroubovice ⇒ zvyšuje<br />
se počet zubů v záběru<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Nevýhody<br />
- Vyosením kloužou hypoidní zuby ve směru osy pastorku ⇒ nutnost<br />
mazání speciálními oleji ⇒ snížení účinnosti ( cca 0,96)<br />
- Nesymetrie zubu<br />
Uložení kuželových kol<br />
Nutno zachytit velké radiální i axiální síly<br />
Způsoby uložení pastorku :<br />
► Letmé uložení ve dvou kuželíkových ložiskách<br />
► Letmé uložení ve dvou kuželíkových a jednom válečkovém ložisku<br />
► Na hlavě pastorku válečkové ložisko + dvě kuželíková ložiska<br />
Uložení talířového kola :<br />
► Převážně na dvou kuželíkových ložiskách<br />
Poloha pastorku a kuželového kola se kontroluje pomocí zrcadlového otisku<br />
U skříně rozvodovky je nutná tuhá konstrukce s žebrováním<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
A) Dvoustupňové rozvodovky<br />
Jednostupňová převodovka i MAX = 7 ⇒ nelze použít u těžkých nákladních<br />
automobilů ⇒ nutno přidat další převod<br />
VSTUP<br />
VSTUP<br />
VÝSTUP<br />
VÝSTUP<br />
VÝSTUP<br />
VÝSTUP<br />
VSTUP<br />
VÝSTUP<br />
VÝSTUP<br />
VSTUP<br />
VÝSTUP<br />
VÝSTUP<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Diferenciál<br />
Planetové soukolí se 2 stupni volnosti :<br />
• Pro rozdělení výkonu na hnací kola<br />
• Pro vyrovnání rozdílných otáček kol při průjezdu zatáčkou<br />
Vozidla bez diferenciálu<br />
• Nadměrně opotřebovávají pneumatiky<br />
• Část výkonu ztrácejí při prokluzu pneumatiky<br />
• Znesnadňují ovládání vozidla<br />
Rozdělení podle funkce<br />
• Mezikolové (nápravové)<br />
• Mezinápravové<br />
• Mezivozidlové<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Rozdělení podle převodu<br />
• Symetrické<br />
• Nesymetrické<br />
Nápravové diferenciály<br />
R poloměr zatáčky (středu nápravy)<br />
n L , n P otáčky kol (levé, pravé viděno z dopředného směru jízdy)<br />
v L , v P obvodové rychlosti kol<br />
v obvodová rychlost středu nápravy<br />
M L , M P momenty na kolech<br />
a rozchod kol<br />
r d poloměr kola (dynamický)<br />
M moment za rozvodovkou<br />
Momentová rovnováha<br />
M<br />
L<br />
= M<br />
P<br />
=<br />
Energetická rovnováha PL = M L<br />
ω<br />
L<br />
PP = M P<br />
ω<br />
P<br />
PL<br />
ω<br />
L<br />
=<br />
PP<br />
ω<br />
P<br />
kinematické vztahy (zatáčka vlevo)<br />
M<br />
2<br />
r d<br />
a<br />
v R −<br />
L = 2<br />
v R<br />
a<br />
v R +<br />
P = 2<br />
v R<br />
a<br />
R −<br />
ω<br />
L<br />
= v 2<br />
rd<br />
R<br />
a<br />
R +<br />
ω<br />
P<br />
= v 2<br />
rd<br />
R<br />
ω P<br />
+ ω<br />
ω =<br />
L<br />
2<br />
a<br />
v P<br />
v L<br />
v<br />
ω L<br />
ω P<br />
R<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
snížení otáček na levé straně = přírůstku otáček na pravé straně<br />
R<br />
ρ =<br />
a<br />
⎛ a ⎞<br />
v = ⎜ R + ⎟ω =<br />
⎝ 2 ⎠<br />
v<br />
P<br />
r d<br />
⎛ a ⎞<br />
= ⎜ R − ⎟ω =<br />
⎝ 2 ⎠<br />
L<br />
r d<br />
ω<br />
ω<br />
P<br />
L<br />
⇒<br />
⇒<br />
ω<br />
P<br />
v ⎛ 1 ⎞<br />
= ⎜1<br />
+ ⎟<br />
r ⎝ 2 ρ<br />
d ⎠<br />
v ⎛ 1 ⎞<br />
ω = L<br />
⎜1<br />
− ⎟<br />
r ⎝ 2 ρ<br />
d ⎠<br />
v<br />
v<br />
P<br />
L<br />
ω<br />
P<br />
=<br />
ω<br />
L<br />
=<br />
2ρ<br />
+ 1<br />
2ρ<br />
−1<br />
Konstrukce diferenciálů<br />
1) Planetový diferenciál<br />
Talířové kolo<br />
= unašeč<br />
Pastorek<br />
rozvodovky<br />
ω U<br />
ω S<br />
ω L<br />
Levé kolo<br />
ω P<br />
Pravé kolo<br />
Satelit<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Kinematická vazba<br />
Základní rovnice<br />
Otáčky satelitu<br />
i<br />
( U )<br />
LP<br />
ω<br />
L<br />
=<br />
ω<br />
P<br />
−ωU<br />
−ω<br />
U<br />
z<br />
= −<br />
z<br />
⎛ z ⎞ z<br />
ω ⎟<br />
U<br />
⎜ +<br />
+<br />
⎝ ⎠<br />
( U ) ω<br />
L<br />
−ωU<br />
z<br />
S<br />
i<br />
LS<br />
= =<br />
ω z<br />
P<br />
L<br />
1<br />
P<br />
P<br />
P<br />
L<br />
z ⎟ = ω ω (1) M<br />
L<br />
z<br />
L = M P ⇒ z L = z P<br />
L<br />
S<br />
( ω −ω<br />
)<br />
L<br />
(2)<br />
P<br />
P L<br />
z<br />
L<br />
z<br />
L<br />
ω<br />
S<br />
=<br />
.<br />
z<br />
P z<br />
(1)→(2)<br />
S<br />
1 +<br />
z<br />
L<br />
z<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
2) Čelní diferenciál<br />
Pastorek rozvodovky<br />
Talířové kolo<br />
= unášeč<br />
Satelit<br />
pravý<br />
Satelit<br />
levý<br />
Levé kolo<br />
Pravé kolo<br />
Kinematická vazba<br />
Klasické provedení :<br />
i<br />
( U )<br />
LP<br />
ω<br />
ω<br />
L U P S 2 S1<br />
=<br />
P<br />
−ω<br />
−ω<br />
z S1 = z S2 ; z P = z L<br />
U<br />
z<br />
= −<br />
z<br />
S 2<br />
z<br />
z<br />
S1<br />
z<br />
z<br />
L<br />
=<br />
−<br />
z<br />
z<br />
P<br />
L<br />
Levé kolo<br />
Satelit levý<br />
Satelit pravý<br />
Pravé kolo<br />
Talířové kolo = unášeč<br />
Pastorek<br />
rozvodovky<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Závěr diferenciálu<br />
• uzamyká diferenciál z důvodu nutnosti přenosu M L = M P<br />
• pomáhá jízdě terénem<br />
Konstrukční provedení<br />
Pevné propojení libovolných dvou částí diferenciálu. Nejčastěji :<br />
• spojení výstupního hřídele s talířovým kolem zubovou spojkou<br />
(pneumaticky)<br />
Závěr diferenciálu = skoková změna ⇒ nutno ovládat řidičem (za klidu vozidla)<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Samosvorný diferenciál (diferenciál se samočinným uzavíráním)<br />
Plynule vyrovnává M L a M P v závislosti na velikosti rozdílu ω L - ω P<br />
Typy samosvorných diferenciálů<br />
1) vačkové<br />
2) se zvýšeným třením<br />
Vačkové<br />
Unášeč nese vačky, jejichž počet je nesoudělný s výstupky na centrálním a<br />
korunovém kole. Při stejných otáčkách C a K se vačky na výstupcích příčí. Při<br />
různých otáčkách se vačky začnou naklápět, ale zvyšuje se tření mezi vačkami a<br />
koly. Dnes se nepoužívá.<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Se zvýšeným třením<br />
• šroubový (Torsen) – kombinace nesamosvorného čelního a šnekového<br />
diferenciálu. Centrální šroubová kola jsou v záběru se šroubovými<br />
satelity. Satelity jsou navzájem propojeny čelním soukolím. Při relativním<br />
pohybu výstupních hřídelů vzniká relativní pohyb ozubených kol, při<br />
kterém špatná účinnost šroubového ozubení vyvolá reakční točivý<br />
moment na kole s pohonem.<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
• Kuželové – mezi kuželovými koly na hnacích hřídelích a skříní jsou<br />
vytvořeny třecí plochy s vysokým třením (např. lamelovou brzdou).<br />
• Lok-O-Matic – satelity jsou uloženy na čepech v klínové drážce. Při<br />
působení momentu se přítlačné kroužky roztahují a přes lamely brzdí o<br />
klec.<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
• Borg-Warner – mezi skříní a planetovými koly jsou třecí spojky. Třecí<br />
moment je vyvozen axiálními silami a přítlačnými vinutými pružinami.<br />
• Diferenciál Borg & Beck<br />
• Diferenciál ZF. Mezi výstupními koly a klecí je viskózní spojka<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
• Řízené diferenciály – přítlak lamel je řízen elektricky, pneumaticky nebo<br />
hydraulicky<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
M<br />
M<br />
P<br />
M<br />
M<br />
L<br />
= −i<br />
= −i<br />
L<br />
RP<br />
P<br />
RL<br />
Diferenciály – účinnosti<br />
Momentové poměry bez uvažování ztrát<br />
1<br />
= −<br />
1 − i<br />
1<br />
= −<br />
1 − i<br />
R<br />
PL<br />
R<br />
LP<br />
R R<br />
Symetrický diferenciál : i i = i = −1<br />
LP<br />
=<br />
PL R<br />
index R ≈ rozvodovka (talířové kolo)<br />
M<br />
M<br />
P<br />
L<br />
= 1<br />
M<br />
M<br />
= M<br />
M<br />
1<br />
= −<br />
2<br />
P L<br />
M 0 ; M < 0<br />
Momenty při uvažování ztrát<br />
P<br />
<<br />
L<br />
V diferenciálu vznikají ztráty výkonu vlivem η<br />
V diferenciálu vzniká „potenciální výkon“<br />
Jízda zatáčkou – vozidlo hnáno motorem (moment roztáčí kola)<br />
moment na kolech je spotřebováván – v motoru vzniká<br />
Δω<br />
Δω<br />
= ω<br />
P<br />
−ω<br />
> 0<br />
= ω − ω < 0<br />
P P<br />
< 0<br />
L L<br />
L<br />
< 0<br />
Z (1) a (2) plyne pro potenciální výkony :<br />
ΔPP = M P<br />
Δω<br />
P<br />
< 0<br />
ΔP = Δω<br />
> 0<br />
L<br />
M L<br />
L<br />
M (1)<br />
M (2)<br />
Tok potenciálního výkonu bude z kola L na kolo P<br />
M<br />
M<br />
M<br />
P<br />
L<br />
= −iPLη<br />
PL<br />
(3)<br />
+ M + M<br />
= 0<br />
P L<br />
(4)<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
Z (3) + (4) plyne :<br />
M<br />
M<br />
P<br />
i<br />
η<br />
PL PL<br />
= 1<br />
;<br />
− iPLη<br />
PL<br />
M<br />
M<br />
L<br />
=<br />
i<br />
PL<br />
1<br />
η<br />
PL<br />
− 1<br />
Symetrický diferenciál : i PL = -1<br />
M<br />
P<br />
M<br />
M<br />
L<br />
M<br />
−η<br />
PL<br />
= 1<br />
;<br />
+ ηPL<br />
− 1<br />
=<br />
+η = 1<br />
PL<br />
M<br />
P<br />
η<br />
M<br />
PL<br />
⇒ větší moment na vnitřním kole<br />
B)<br />
Jízda zatáčkou – vozidlo hnáno koly<br />
moment na kolech vzniká – motor jej spotřebovává<br />
Δω<br />
Δω<br />
= ω<br />
P<br />
−ω<br />
> 0<br />
= ω − ω < 0<br />
P P<br />
> 0<br />
L L<br />
L<br />
> 0<br />
Z (5) a (6) plyne pro potenciální výkony :<br />
ΔPP = M P<br />
Δω<br />
P<br />
> 0<br />
ΔP = Δω<br />
< 0<br />
L<br />
M L<br />
L<br />
M (5)<br />
M (6)<br />
Tok potenciálního výkonu bude z kola P na kolo L<br />
M<br />
M<br />
M<br />
L<br />
P<br />
= −iLPη<br />
LP<br />
(7)<br />
+ M + M<br />
= 0<br />
P L<br />
(8)<br />
Z (7) + (8) plyne :<br />
M<br />
M<br />
L<br />
i<br />
η<br />
LP LP<br />
= 1<br />
;<br />
− iLPη<br />
LP<br />
M<br />
M<br />
P<br />
=<br />
i<br />
LP<br />
1<br />
η<br />
LP<br />
− 1<br />
Symetrický diferenciál : i PL = -1<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + Diferenciál<br />
M<br />
M<br />
L<br />
M<br />
P<br />
M<br />
−η<br />
M<br />
LP P<br />
= = ηLP<br />
1<br />
;<br />
+ ηLP<br />
M<br />
− 1<br />
= 1 +η<br />
LP<br />
⇒ větší moment na vnějším kole<br />
Silové poměry nápravy s diferenciálem při jízdě zatáčkou<br />
Momentům na kolech jsou přímo úměrné hnací síly na obvodu kol F KP ; F KL<br />
resp. suvné síly v ložiskách X P ; X L .<br />
X = F K<br />
− O<br />
M<br />
K<br />
f<br />
F<br />
K<br />
=<br />
rd<br />
Poháněná náprava X L > X P<br />
Bržděná náprava X L < X P<br />
F KL<br />
X L<br />
O fL<br />
ΔM<br />
Δ<br />
X<br />
B/2 B/2<br />
B<br />
F KP<br />
X P<br />
O fP<br />
Pásmo neurčitosti pro přímou jízdu<br />
X L<br />
ΔM<br />
Δ<br />
X<br />
B/2 B/2<br />
B<br />
X P<br />
v<br />
Pohon<br />
Brždění<br />
Poloha výslednice dává v důsledku vyosení moment ΔM, který se snaží vytáčet<br />
nápravu (a přes zavěšení i celé vozidlo). Diferenciál je tedy jedním z činitelů,<br />
které způsobují nedotáčivost vozidla. Moment ΔM je tím větší, čím nižší (horší)<br />
je účinnost diferenciálu.<br />
Pavel Němeček 2009
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + diferenciál<br />
M = F r = +<br />
P<br />
L<br />
KP<br />
M = F r = +<br />
KL<br />
M<br />
P<br />
< M L<br />
X<br />
X<br />
P<br />
L<br />
−<br />
−<br />
M<br />
r<br />
r<br />
d<br />
M<br />
d<br />
P<br />
L<br />
d<br />
d<br />
= O<br />
= O<br />
fP<br />
fL<br />
=<br />
=<br />
( X P<br />
O fP<br />
) r d<br />
( X L<br />
O fL<br />
) r d<br />
M<br />
M<br />
P<br />
L<br />
− M<br />
rd<br />
− M<br />
r<br />
d<br />
fP<br />
fL<br />
M<br />
M<br />
P<br />
L<br />
= F<br />
= F<br />
KP<br />
KL<br />
M<br />
P<br />
> M L<br />
X<br />
X<br />
P<br />
L<br />
−<br />
−<br />
M<br />
r<br />
r<br />
d<br />
M<br />
d<br />
P<br />
L<br />
r<br />
r<br />
d<br />
d<br />
= O<br />
= O<br />
fP<br />
fL<br />
=<br />
=<br />
=<br />
=<br />
( X P<br />
− O fP<br />
) r d<br />
( X L<br />
− O fL<br />
) r d<br />
M<br />
M<br />
P<br />
L<br />
+ M<br />
rd<br />
+ M<br />
r<br />
Rovnováha M k podélné ose vozidla<br />
X = X L<br />
+ X P<br />
1<br />
ΔM<br />
= X. Δ = B X L<br />
− X P<br />
2<br />
B XL<br />
− XP<br />
Δ =<br />
2X<br />
d<br />
fP<br />
fL<br />
Při pomalé jízdě zatáčkou, kdy X L není omezeno adhezí při symetrickém<br />
diferenciálu i R = -1 bude :<br />
ΔM<br />
=<br />
MR<br />
B 1− η<br />
.<br />
2 r 1+ η<br />
d<br />
R<br />
R<br />
Pavel Němeček 2009 26/30
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + diferenciál<br />
F<br />
F<br />
K<br />
1<br />
K max<br />
Adhezní schopnost nápravy – při poklesu μ K<br />
0,5<br />
bez diferenciálu<br />
η R =1<br />
η R =0,75<br />
η R =0,5<br />
η R =0,25<br />
μ KO =μ Kmax = maximální hodnota součinitele adheze<br />
1<br />
μ<br />
μ<br />
KP<br />
KO<br />
1. náprava bez diferenciálu :<br />
F<br />
F<br />
K<br />
=<br />
K max<br />
ZP<br />
F<br />
=<br />
KL<br />
+ F<br />
KP<br />
=<br />
F<br />
Z<br />
( F ZL<br />
+ F ZP<br />
) μ KO<br />
ZL<br />
Z<br />
KO<br />
Z<br />
KP<br />
Z<br />
( μ μ )<br />
μ + F μ = F +<br />
F = F = F = konst. ⇒ F + F = 2F<br />
F<br />
F<br />
K<br />
K max<br />
1 ⎛ μ<br />
⎜1<br />
+<br />
2 ⎝ μ<br />
= KP<br />
KO<br />
2. náprava s diferenciálem bez tření<br />
F<br />
K<br />
F<br />
F<br />
K<br />
K max<br />
= FKL<br />
+ F<br />
μ<br />
KP<br />
=<br />
μ<br />
KO<br />
KP<br />
⎞<br />
⎟<br />
⎠<br />
= 2 F = 2F<br />
KP<br />
Z<br />
ZL<br />
μ<br />
KP<br />
ZP<br />
KO<br />
Z<br />
KP<br />
Pavel Němeček 2009 27/30
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + diferenciál<br />
3. náprava s třením (0 < η R < 1)<br />
F<br />
K<br />
1 ⎛ 1<br />
= F + = + =<br />
⎜<br />
KL<br />
FKP<br />
FKP<br />
FKP<br />
FZ<br />
μ<br />
KP<br />
1 +<br />
η<br />
R ⎝ η<br />
R<br />
F ⎛ ⎞<br />
K<br />
1 μ =<br />
KP<br />
1<br />
⎜1<br />
+<br />
⎟<br />
FK<br />
max<br />
2 μ<br />
KO ⎝ ηR<br />
⎠<br />
Adhezní schopnost nápravy – při poklesu F Z (vlivem odstředivé síly)<br />
⎞<br />
⎟<br />
⎠<br />
F<br />
F<br />
K<br />
1<br />
K max<br />
bez diferenciálu<br />
η R =1<br />
0,5<br />
η R =0,25<br />
η R =0,75<br />
η R =0,5<br />
μ KO =μ Kmax = maximální hodnota součinitele adheze<br />
1<br />
F<br />
F<br />
ZL<br />
Z<br />
1. náprava bez diferenciálu :<br />
K<br />
( FZL<br />
+ FZP<br />
) μ<br />
KO<br />
= 2FZ<br />
KO<br />
FK<br />
max<br />
F = μ =<br />
F<br />
F<br />
K<br />
K max<br />
= 1<br />
2. náprava s diferenciálem bez tření<br />
F<br />
F<br />
F<br />
=<br />
2<br />
K<br />
F ZL<br />
K<br />
K max<br />
F<br />
=<br />
F<br />
ZL<br />
Z<br />
μ<br />
KO<br />
Pavel Němeček 2009 28/30
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + diferenciál<br />
3. náprava s třením (0 < η R < 1)<br />
F K<br />
F ZL<br />
μ<br />
F<br />
F<br />
K<br />
K max<br />
⎛ 1<br />
⎜1<br />
+<br />
⎝ η<br />
=<br />
KO<br />
R<br />
1<br />
F<br />
⎛ 1 ⎞<br />
⎜1<br />
+<br />
⎟<br />
⎝ η ⎠<br />
=<br />
ZL<br />
2 FZ<br />
R<br />
⎞<br />
⎟<br />
⎠<br />
Výsledná účinnost diferenciálu<br />
Pohon :<br />
η<br />
Cp<br />
M<br />
P<br />
M<br />
η<br />
Cp<br />
P<br />
= −<br />
P<br />
+ P<br />
P<br />
η<br />
L<br />
R<br />
= − ; 1 + η<br />
R<br />
1 −η<br />
R<br />
= 1−<br />
1+<br />
η<br />
MPωP<br />
+ MLω<br />
= −<br />
M ω<br />
R<br />
1<br />
2ρ<br />
M<br />
L<br />
M<br />
=<br />
R<br />
ztráty<br />
L<br />
⎛ MP<br />
= −<br />
⎜<br />
⎝ M<br />
η<br />
R<br />
−<br />
1 + η<br />
R<br />
ω<br />
ω<br />
P<br />
R<br />
+<br />
ML<br />
M<br />
ω<br />
ω<br />
L<br />
R<br />
⎞<br />
⎟<br />
⎠<br />
Brždění :<br />
η<br />
Cb<br />
=<br />
P<br />
P<br />
P<br />
+<br />
P<br />
L<br />
=<br />
M<br />
Pω<br />
P<br />
Mω<br />
R<br />
1<br />
+<br />
M<br />
Lω<br />
L<br />
Mω<br />
R<br />
η<br />
Cb<br />
=<br />
1<br />
1 −η<br />
R<br />
1 +<br />
1+<br />
η<br />
R<br />
1<br />
2ρ<br />
ρ =<br />
R<br />
B<br />
Pavel Němeček 2009 29/30
TU v Liberci – Fakulta strojní – <strong>Katedra</strong> <strong>vozidel</strong> a motorů<br />
Kolové dopravní a manipulační stroje I<br />
4 – Rozvodovka + diferenciál<br />
Ozubená kola poloos<br />
4 satelity<br />
D =<br />
6,937 3 M<br />
R<br />
2 satelity<br />
D = 6,353 3 M<br />
R<br />
Návrh diferenciálu<br />
D … roztečný průměr kol planetového soukolí spojených s poloosami [mm]<br />
M R .. moment na talířovém kole [Nm]<br />
Zatížení zubů<br />
bez tření<br />
F<br />
max<br />
=<br />
M<br />
M max ..<br />
i p …<br />
m …<br />
η p …<br />
M<br />
M<br />
max<br />
i<br />
p<br />
mD<br />
η<br />
p<br />
maximální moment motoru<br />
převod na převodovém stupni<br />
počet satelitů<br />
účinnost převodovky<br />
s uvažováním tření<br />
M<br />
2M<br />
maxi<br />
pη<br />
p<br />
F =<br />
( 1 + η)mD<br />
η … účinnost diferenciálu<br />
diferenciál se závěrkou (může být přenášen celý moment)<br />
M<br />
2Mmaxi<br />
pη<br />
p<br />
F =<br />
mD<br />
Pavel Němeček 2009 30/30