3. POSPEŠEK DELCA Po prostoru gibajoči se delec se v času t ...
3. POSPEŠEK DELCA Po prostoru gibajoči se delec se v času t ...
3. POSPEŠEK DELCA Po prostoru gibajoči se delec se v času t ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>3.</strong> <strong>POSPEŠEK</strong> <strong>DELCA</strong><br />
<strong>Po</strong> <strong>prostoru</strong> <strong>gibajoči</strong> <strong>se</strong> <strong>delec</strong> <strong>se</strong> v <strong>času</strong> t nahaja v točki T na krivulji, podani s<br />
krajevnim vektorjem v r = v r (t), pri čemer znaša njegova hitrost tedaj, ko <strong>se</strong> nahaja v<br />
v v<br />
navedeni točki T, v = v (t). <strong>Po</strong> preteku (končnega) časovnega intervala ∆ t <strong>se</strong> <strong>delec</strong> nahaja<br />
v<br />
v točki T’, ki je podana s krajevnim vektorjem r ’= v r (t+ ∆ t) kjer znaša tedaj trenutna<br />
v v<br />
hitrost delca v ’= v (t+ ∆ t). V danem časovnem intervalu ∆ t, <strong>se</strong> je hitrost delca<br />
spremenila za (končno) vrednost ∆ v , ki je definirana z izrazom, = v ∆ ’ -<br />
v v<br />
v v v =<br />
v v<br />
v (t+ ∆ t) - v (t). V<br />
T<br />
v (t)<br />
v r (t) v r (t+∆t)<br />
T’<br />
v (t+∆t)<br />
v v<br />
∆ v (t+ ∆ t)<br />
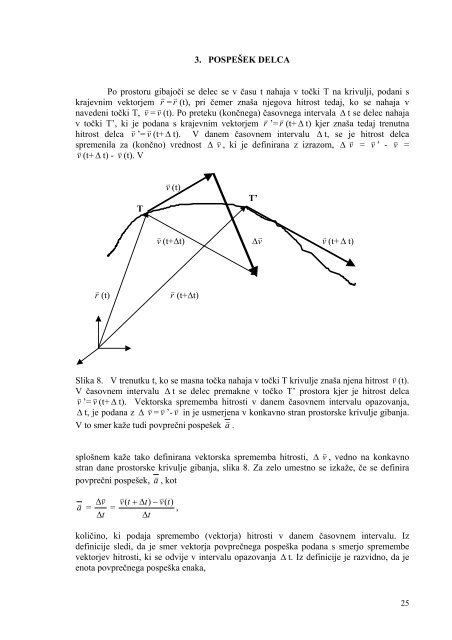
Slika 8. V trenutku t, ko <strong>se</strong> masna točka nahaja v točki T krivulje znaša njena hitrost v (t).<br />
V časovnem intervalu t <strong>se</strong> <strong>delec</strong> premakne v točko T’ prostora kjer je hitrost delca<br />
’= v ∆<br />
v v (t+ ∆ t). Vektorska sprememba hitrosti v danem časovnem intervalu opazovanja,<br />
∆ t, je podana z ∆ v = v ’- v v v in je usmerjena v konkavno stran prostorske krivulje gibanja.<br />
v<br />
V to smer kaže tudi povprečni pospešek a .<br />
splošnem kaže tako definirana vektorska sprememba hitrosti, ∆ v v , vedno na konkavno<br />
stran dane prostorske krivulje gibanja, slika 8. Za zelo umestno <strong>se</strong> izkaže, če <strong>se</strong> definira<br />
povprečni pospešek, v a , kot<br />
v<br />
a = ∆<br />
v<br />
∆t<br />
=<br />
v v<br />
v(<br />
t + ∆t)<br />
− v(<br />
t)<br />
,<br />
∆t<br />
količino, ki podaja spremembo (vektorja) hitrosti v danem časovnem intervalu. Iz<br />
definicije sledi, da je smer vektorja povprečnega pospeška podana s smerjo spremembe<br />
vektorjev hitrosti, ki <strong>se</strong> odvije v intervalu opazovanja ∆ t. Iz definicije je razvidno, da je<br />
enota povprečnega pospeška enaka,<br />
25
[ ]<br />
v<br />
a =<br />
m/ s<br />
s<br />
= m<br />
. 2<br />
s<br />
<strong>Po</strong>vprečni pospešek, v a , sam po <strong>se</strong>bi ne predstavlja pomembnejše kinematične<br />
karakteristike gibajočega delca, marveč služi le za definicijo (trenutnega) pospeška v a , ki<br />
je podan z izrazom,<br />
v<br />
a = lim ∆ t → 0 ∆<br />
v<br />
∆<br />
t = lim ∆ t → 0<br />
v v<br />
v(<br />
t + ∆t)<br />
− v(<br />
t)<br />
∆t<br />
= dv<br />
v<br />
dt<br />
= dr<br />
2v<br />
2<br />
dt<br />
= v &&<br />
r .<br />
<strong>Po</strong>spešek delca, v a , je enak kvocientu infinitezimalne spremembe hitrosti, d v , ki <strong>se</strong> je<br />
odvila v infinitezimalnem časovnem intervalu dt. Iz definicije je razvidno, da ima<br />
(trenutni) pospešek smer infinitezimalne spremembe hitrosti d v , ki v splošnem tudi kaže<br />
na konkavno stran prostorske krivulje gibanja.<br />
Ob tej definiciji je tokrat potrebno podrobneje navesti smer vektorja pospeška v a . Naj<br />
bo v r krajevni vektor do točke T na krivulji. Enotni vektor tangente v tej točki je podan z<br />
)<br />
etg . Od prej je poznano, da je<br />
) e tg =<br />
v<br />
v =<br />
v<br />
s&<br />
v<br />
dr<br />
=<br />
ds<br />
= v r ’,<br />
kjer črtica pomeni, da gre za odvod krajevnega vektorja po naravni koordinati s.<br />
Kot je znano iz matematike, je oblika prostorske krivulje natančno določena, če sta<br />
poznani t.im. fleksijska in torzijska ukrivljenost krivulje v odvisnosti od parametra s. S tem<br />
v zvezi je najprej potrebno definirati normalno ravnino prostorske krivulje kot tisto<br />
ravnino, ki poteka skozi izbrano točko T(x,y,z) krivulje in stoji pravokotno na tangenti ) e tg .<br />
Če vektor v R =(X, Y, Z) označuje krajevni vektor poljubne točke (X, Y, Z) na normalni<br />
ravnini je vektorska razlika v R - v r vektor, ki leži v normalni ravnini in zato stoji pravokotno<br />
na ) e tg . Enačba normalne ravnine <strong>se</strong> zato v vektorski obliki glasi<br />
( v R - v r ) v &r = 0.<br />
Tista ravnina, ki poteka skozi tangento, ) e tg , in <strong>se</strong> dani prostorski krivulji v izbrani točki<br />
T(x,y,z) najtesneje prilega <strong>se</strong> imenuje pritisnjena ravnina (v primeru, da gre za ravninsko<br />
krivuljo je pritisnjena ravnina kar tista ravnina v kateri leži krivulja sama). V splošnem je<br />
pritisnjena ravnina tista ravnina, ki poteka skozi dano točko krivulje T in dve ali več točk,<br />
ki<br />
v<br />
ležijo na krivulji in <strong>se</strong> nahajajo v infinitezimalno bližnji okolici dane točke T. Če <strong>se</strong>daj<br />
R pomeni krajevni vektor, do poljubne točke (X,Y,Z), ki leži v pritisnjeni ravnini, vektor<br />
v<br />
r pa krajevni vektor izbrane točke T krivulje <strong>se</strong>, kot je znano iz matematike, enačba<br />
pritisnjene ravnine v vektorski obliki zapiše,<br />
( v R - v r ) ( v &r x v &&<br />
r ) = 0,<br />
oziroma, če je krivulja izražena z naravno koordinato s, v obliki<br />
( v R - v r ) ( ) e t x ) e t ’) = 0<br />
26
kjer je ) e t = ) e t (s) in črtica pomeni odvod enotnega vektorja v smeri tangente, ) e t , po naravni<br />
koordinati. Iz slednjega izraza izhaja, da je vektorski produkt ) e t x ) e t ’ vektor, ki stoji<br />
pravokotno na pritisnjeno ravnino in ker mora biti mešani produkt vektorjev, od katerih sta<br />
dva enaka po definiciji nič, je<br />
)et ’ ( ) e t x ) e t ’) = ( ) e t ’, ) e t , ) e t ’) = 0.<br />
Od tod izhaja, da leži vektor ) et ’ v pritisnjeni ravnini in ker je ) et enotni vektor stoji<br />
) ' ) '<br />
e te<br />
t enaka recipročni<br />
pravokotno na njega. Izkaže <strong>se</strong>, da je velikost vektorja ) e t<br />
' =<br />
vrednosti polmera pritisnjenega kroga, rpr, na krivuljo v točki T(x,y,z),<br />
1<br />
r pr<br />
=<br />
) )<br />
e e<br />
' '<br />
t t<br />
2 2<br />
= x'' + y'' + z''<br />
2 .<br />
Enotni vektor, ki leži na premici v pritisnjeni ravnini ter poteka skozi izbrano točko T tako,<br />
da stoji pravokotno na tangenti, ) e t , in kaže proti središču pritisnjenega kroga (torej na<br />
konkavno stran krivulje) <strong>se</strong> imenuje glavna normala, ) n . Ker je tudi ) e t ’ vektor v pritisnjeni<br />
ravnini in stoji pravokotno na ) e t , leži vektor ) e t ’ na glavni normali in ker je njegova<br />
absolutna vrednost enaka 1/rpr, sledi,<br />
)<br />
et ’ = 1<br />
rpr ) n .<br />
Vektorski produkt enotnih vektorjev tangente in glavne normale je vektor, ki po definiciji<br />
stoji pravokotno na oba vektorja in je torej pravokoten na pritisnjeno ravnino. Če <strong>se</strong><br />
navedeni vektorski produkt označi z vektorjem ) e bi , torej<br />
)ebi = ) e t x ) n<br />
le-ta definira binormalo, to je enotni vektor, ki stoji pravokotno na vektorja ) e t in ) n (in<br />
definirata pritisnjeno ravnino). Da je velikost (t.j. absolutna vrednost) vektorja ) e bi v resnici<br />
enaka 1 je razvidno iz definicije, saj je ) e bi = sin 90 o = 1.<br />
Iz zapisanega je očitno, da določa krivulja v <strong>prostoru</strong> v vsaki svoji točki T tri med <strong>se</strong>boj<br />
pravokotne enotne vektorje, tangento ) e t , glavno normalo, ) n , in binormalo, ) e bi , ki tvorijo<br />
desnosučni koordinatni sistem, poimenovan naravni, oziroma osnovni trieder. Le-ta je<br />
torej definiran z izrazom,<br />
)et x ) n = ) e bi .<br />
Iz definicije pospeška delca, v a , sledi<br />
v<br />
a = v && r = d( &s ) et )/dt = && s ) et + &s de<br />
)<br />
t<br />
dt<br />
,<br />
27
pri čemer je potrebno izračunati še odvod enotnega vektorja v smeri tangente na krivuljo v<br />
točki T po <strong>času</strong>. Iz definicije odvoda sledi,<br />
)<br />
det<br />
dt<br />
= lim ∆t→o ∆<br />
)<br />
et<br />
,<br />
∆t<br />
kjer je ∆ ) et = ) )<br />
et (t+ ∆ t) - et (t) in vektor ) et (t+ ∆ t) je enotni vektor tangente v točki T’ na<br />
krivulji katere koordinate so (x(t+ ∆ t), y(t+ ∆ t),z(t+ ∆ t)). Ker velja,<br />
lim ∆t→o ∆<br />
)<br />
et<br />
= lim ∆t→o<br />
∆t<br />
∆<br />
)<br />
et<br />
∆s<br />
= &s lim∆s→o<br />
∆s<br />
∆t<br />
∆<br />
)<br />
et<br />
=<br />
∆s<br />
)<br />
det<br />
&s<br />
ds<br />
=<br />
&s ) e t ’<br />
zaradi že prej izpeljanih izrazov sledi, da je pospešek delca pri poljubnem gibanju po<br />
prostorski krivulji opisan z enačbo,<br />
v<br />
a = && s ) et + &s<br />
kjer je<br />
2<br />
r pr<br />
) n ,<br />
&& s = d( &s )/dt = d(v)/dt = atg<br />
&s<br />
2<br />
r pr<br />
= v<br />
2<br />
rpr = an<br />
atg komponenta vektorja pospeška vzdolž tangente na krivuljo in je povezana s časovno<br />
spremembo absolutne vrednosti (velikosti) vektorja hitrosti in an je komponenta pospeška<br />
delca vzdolž glavne normale, ) n .<br />
V splošnem <strong>se</strong> da dokazati, da je vrednost polmera pritisnjenega kroga na krivuljo v<br />
točki T, rpr, enaka recipročni vrednosti fleksijske ukrivljenosti (ali upognjenosti) krivulje,<br />
1/ ρ , pri čemer je upognjenost definirana kot,<br />
1<br />
ρ = lim ∆s→o ∆ϑ<br />
∆s<br />
,<br />
kjer je kot ∆ ϑ definiran kot kot med vektorjema ) et (t) in ) et (t+ ∆ t) in torej pomeni kot<br />
zavrtitve enotnega vektorja tangente krivulje v časovnem intervalu ∆ t, ko <strong>se</strong> naravna<br />
koordinata spremeni za vrednost ∆ s.<br />
Na podoben način je definirana torzijska ukrivljenost ali zvitost krivulje, τ. Binormali<br />
)<br />
ebi (t) v točki T in ) ebi (t+ ∆ t) v točki T’ v splošnem med <strong>se</strong>boj oklepata od nič različen kot<br />
∆ψ. Tedaj meri kvocient ∆ψ/ ∆ s hitrost s katero <strong>se</strong> suče binormala, če gre točka od T do<br />
T’. Limita tega kvocienta, ko gre T’ proti T je definirana kot torzijska ukrivljenost ali<br />
zvitost,<br />
28
1<br />
τ<br />
= lim∆s→o ∆<br />
ψ<br />
∆s<br />
Mogoče je pokazati, da je recipročna zvitost krivulje 1/τ, enaka absolutni vrednosti odvoda<br />
. Med navedenimi količinami v splošnem velja<br />
binormale po spremenljivki s, t.j. ) '<br />
e bi<br />
naslednja povezava,<br />
)<br />
ebi ’ = - 1<br />
τ ) n .<br />
Iz definicije pospeška delca, v a = v&v = v && r , je kaj enostavno zapisati komponente<br />
pospeška izraženega v različnih koordinatnih sistemih, tako n. pr. velja za:<br />
1. kartezični koordinatni sistem,<br />
v a = && x ) i + &&y +<br />
v j && z ) k ,<br />
kjer <strong>se</strong> komponente pospeška vzdolž koordinatnih osi izražajo kot<br />
ax = && x<br />
ay =<br />
&&y<br />
az = && z ,<br />
in velikost pospeška a tedaj znaša,<br />
2 2<br />
a = && x + && y + && z<br />
2 ,<br />
2. polarni koordinatni sistem,<br />
v a = d/dt( d( ρ ) eρ +z ) k )/dt) = d/dt( &ρ ) eρ + ρ &ϕ ) eϕ ) + && z ) k<br />
)<br />
v 2<br />
a = ( && ρ−ρϕ& )<br />
) eρ + ( r&& ϕ + 2 r&&<br />
ϕ ) ) eϕ + && z k<br />
od koder je razvidno, da <strong>se</strong> pospešek zapiše kot vektorska vsota med <strong>se</strong>boj pravokotnih<br />
komponent aρ, aϕ in az, kjer so,<br />
v 2<br />
a = ( && &<br />
)<br />
ρ ρ−ρϕ ) eρ<br />
v )<br />
a = ( r&& ϕ ϕ + 2 r&&<br />
ϕ ) eϕ v )<br />
a z = && z k ,<br />
količine, ki definirajo radialni pospešek v aρ , prečni (cirkularni) pospešek v a ϕ in<br />
v<br />
komponente pospeška v smeri stalne osi z, a z tako da je absolutna vrednost pospeška<br />
podana z,<br />
a =<br />
2 2<br />
(&& ρ− ρϕ& )<br />
2<br />
+ ( ρϕ&& + 2 & ρϕ&<br />
)<br />
2<br />
+ && z ,<br />
<strong>3.</strong> krogelni koordinatni sistem<br />
29
V tem sistemu je najlažje izračunati komponente pospeška delca s pomočjo časovnega<br />
v<br />
odvoda kartezičnih komponent krajevnega vektorja r izraženega s krogelnimi<br />
koordinatami, r, θ in ϕ ,<br />
x = r sin θ cos ϕ<br />
y = r sin θ sin ϕ<br />
z = r cos θ ,<br />
2 2<br />
tako, da <strong>se</strong> iz izraza a = && x + && y + && z<br />
2 , po preureditvi členov lahko zapiše,<br />
2 2 2<br />
r ϑ ϕ ,<br />
a = a + a + a<br />
kjer so komponente pospeška podane z izrazi,<br />
ar = && r - r &ϕ sin<br />
2 2 θ - r &θ 2<br />
aθ = r && θ + 2 r && θ - r &ϕ sin<br />
2<br />
θ cos θ<br />
a = r<br />
ϕ<br />
Zgled:<br />
&& ϕ sin θ + 2 & &<br />
rϕ sin θ + 2 r & ϕθ& cos θ<br />
Kroženje delca po krožnici polmera r v stalni ravnini. Ker je ρ =konstanta sledi, da je<br />
&ρ = &&ρ = 0 in če <strong>se</strong> vzame, da krožnica leži v x-y ravnini je z = 0 in zato je<br />
va =<br />
−ρϕ& 2 ) eρ + r &&<br />
ϕ ) e ϕ<br />
kar pomeni, da pospešek delca <strong>se</strong>stoji iz radialne in tangentne komponente.<br />
at<br />
ar a v<br />
Slika 9. <strong>Po</strong>spešek v a delca, ki <strong>se</strong> giblje po<br />
krožnici (v stalni ravnini) polmera r <strong>se</strong>stoji<br />
iz komponente v smeri tangente (tangentni<br />
pospešek) in komponente v smeri glavne<br />
normale (radialni pospešek).<br />
Če je gibanje takšno, da velja ϕ =konst. sledi, da je v a = v a ρ = &&ρ ) e ρ , kar pa predstavlja<br />
pospešeno premočrtno gibanje delca.<br />
30
2. Gibanje delca po vijačnici. Enačba vijačnice v parametrični obliki je podana (glej<br />
zgled v prejšnjem poglavju) v parametrični obliki: x=Rcosωt, y=Rsinωt in z=Ct, pri čemer<br />
so R, ω in C konstante.<br />
V danem primeru <strong>se</strong> skalarni produkt v &r v &r zapiše v enostavni obliki, v &r v &r = (Rω) 2 +<br />
C 2 od koder sledi, da je ločna dolžina enaka, s= ( Rω) C<br />
2 + 2 t = c t, pri čemer je c<br />
definiran kot c=<br />
2 2<br />
R ω<br />
2<br />
+ C . Krajevni vektor v <strong>se</strong>daj zapiše,<br />
r v odvisnosti od naravne koordinate <strong>se</strong><br />
vr = (Rcos(ωs/c), Rsin(ωs/c), (C/c)s)<br />
in zato je enotni vektor na tangenti vijačnice v točki T, ki je za ločno dolžino s oddaljena<br />
od začetne točke To,<br />
)et = v r ’ = (-(Rω/c)sin(ωs/c), (Rω/c)cos(ωs/c), (C/c)).<br />
V tej točki je odvod enotnega vektorja po naravni koordinati podan z izrazom,<br />
)et ’ = v r ’’ = (-(Rω 2 /c 2 )cos(ωs/c), -(Rω 2 /c 2 )sin(ωs/c), 0)<br />
in dolžina (absolutna vrednost) zapisanega vektorja znaša tedaj,<br />
1<br />
r pr<br />
=<br />
v v<br />
r'′ r'<br />
′ = R<br />
c<br />
ω 2<br />
2<br />
,<br />
tako, da je polmer pritisnjenega kroga na vijačnico v točki T enak,<br />
rpr = R<br />
2 2 2<br />
ω<br />
2<br />
2<br />
+ C C<br />
= R + 2<br />
Rω<br />
Rω<br />
.<br />
Iz gornjega izraza je razvidno, da je polmer pritisnjenega kroga rpr večji kot je polmer<br />
krožnice R, ki je projekcija vijačnice na xy ravnino. Samo za C=0 je tedaj rpr = R, toda<br />
tedaj kroži <strong>delec</strong> po krožnici v xy ravnini.<br />
Enotni vektor vzdolž glavne normale ) n je <strong>se</strong>daj podan z,<br />
)n = rpr ) e t ’ = (-cos(ωs/c), -sin(ωs/c), 0) = (-cosωt, -sinωt, 0).<br />
Glavna normala ) n je vzporedna z ravnino xy in poteka skozi os valja. Binormala, ki stoji<br />
pravokotno na pritisnjeni ravnini je tedaj,<br />
)ebi = ) e t x ) n = ((C/c)sin(ωs/c), -(C/c)cos(ωs/c), Rω/c)<br />
tako, da je odvod binormale po naravni koordinati, ) e bi ’, podan z<br />
31
)<br />
e bi ’ = ((Cω/c 2 )cos(ωs/c), (Cω/c 2 )sin(ωs/c), 0).<br />
Torzijska ukrivljenost τ je tedaj,<br />
τ = C<br />
ω = 2<br />
c<br />
C<br />
2 2 2<br />
R ω + C<br />
ω<br />
in je prav tako kot fleksijska ukrivljenost, 1/rpr, ki je enaka recipročni vrednosti polmera<br />
pritisnjenega kroga, konstantna.<br />
V polarnih koordinatah <strong>se</strong> komponente hitrosti delca v v zapišejo,<br />
vv = v &r = R ω ) e + C<br />
ϕ<br />
vρ = 0<br />
vϕ = Rω<br />
vz = C<br />
)<br />
k<br />
tako. da je v danem primeru velikost hitrosti delca v=<br />
delca tedaj znaša,<br />
2 2<br />
R ω<br />
2<br />
+ C = konstanta. <strong>Po</strong>spešek<br />
va v<br />
= && r = v&v v<br />
= Rω &e ϕ = Rω (-<br />
&ϕ ) e ρ ) = -Rω 2 ) e ρ ,<br />
pri čemer je bil upoštevan izraz ϕ =ωt. Komponente pospeška v polarnem koordinatnem<br />
sistemu <strong>se</strong> <strong>se</strong>daj glasijo,<br />
aρ = - Rω 2<br />
aϕ = 0<br />
az = 0.<br />
<strong>3.</strong><br />
.<br />
ϕ E<br />
R<br />
Slika 10. Krožna plošča polmera R je<br />
vrtljivo vpeta v točki, ki je od središča<br />
oddaljena za razdaljo E. Plošča <strong>se</strong><br />
enakomerno vrti pri čemer <strong>se</strong> kot ϕ<br />
spreminja po enačbi, ϕ=Kt kjer je K<br />
konstanta. Oboda plošče <strong>se</strong> dotika palica, ki<br />
je vpeta tako, da dovoljuje gibanje palice<br />
samo v navpični smeri. Izpelji enačbo<br />
gibanja konice palice ter izračunaj hitrost in<br />
pospešek te točke v odvisnosti od časa.<br />
Palica <strong>se</strong> giblje samo v navpični smeri. Trenutno lego konice palice podaja krajevni vektor<br />
v<br />
r , ki ima v izbranem koordinatnem izhodišču komponente v r =(0,y). Iz skice je razvidno,<br />
da velja,<br />
32
2 2 2<br />
y=E cosϕ + R − E sin ϕ<br />
in hitrost ter pospešek krajišča palice <strong>se</strong> dobi s časovnim odvajanjem zapisanega izraza.<br />
vv = v &r = (0, vy)<br />
⎡<br />
⎢<br />
⎣<br />
vy = - EK sin(Kt) 1<br />
v<br />
a = v &&<br />
r = (0, ay)<br />
ay = K vy ctgKt +<br />
4.<br />
v e tg<br />
θ<br />
+<br />
EcosKt 2 2 2<br />
R E sin Kt<br />
V splošnem velja v = &s , zato je,<br />
v = kbe kt = ks<br />
2 kt 2<br />
at = &v = bk e = k s<br />
at = a cos Θ = k 2 s<br />
2 2<br />
an = a sin Θ = a − at Iz poslednjih dveh enačb sledi,<br />
−<br />
2 2 2<br />
2 2<br />
EKsin Kt ⎡ E cos Kt ⎤<br />
2 2 2 ⎢1<br />
− 2 2 2 ⎥<br />
R − E sin Kt ⎣ R − E sin Kt⎦<br />
v a<br />
⎤<br />
⎥<br />
⎦<br />
Slika 11. Delec potuje po krivulji opisani z<br />
izrazom s=be kt tako, da vektor pospeška ves<br />
čas oklepa konstanten kot Θ s tangento na<br />
krivuljo. Kolikšen je krivinski polmer<br />
pritisnjenega kroga in kolikšni so hitrost<br />
delca, v, pospešek a ter tangentna, at in<br />
normalna, an, komponenta pospeška.<br />
33
tg Θ = an<br />
at<br />
zato je<br />
an = at tg Θ.<br />
Ker pa velja, da je<br />
an = v<br />
2<br />
rpr je polmer pritisnjenega kroga enak<br />
rpr = v<br />
2<br />
an = ks<br />
2 2<br />
2<br />
kstgθ<br />
= s<br />
tgθ = b ekt ctg Θ<br />
<strong>Po</strong>spešek delca, a, je tedaj enak<br />
2<br />
a = an + at<br />
2 = at 1<br />
2<br />
+ tg θ = k 2 b e kt 2<br />
1+<br />
tg θ .<br />
34