Koncepti automatizovanog pozicioniranja totalne stanice
Koncepti automatizovanog pozicioniranja totalne stanice Koncepti automatizovanog pozicioniranja totalne stanice
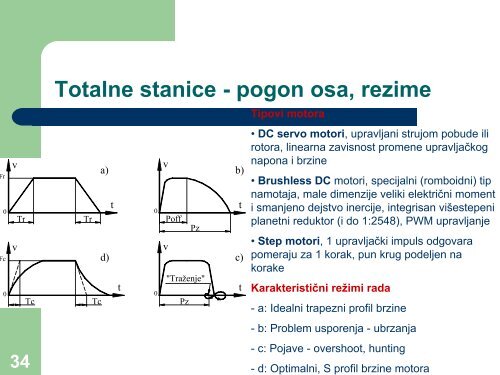
0 c 0 v v 34 Totalne stanice - pogon osa, rezime Tr Tr Tc Tc v a) b) d) t t 0 0 Poff v Pz Pz "Traženje" t c) t Tipovi motora • DC servo motori, upravljani strujom pobude ili rotora, linearna zavisnost promene upravljačkog napona i brzine • Brushless DC motori, specijalni (romboidni) tip namotaja, male dimenzije veliki električni moment i smanjeno dejstvo inercije, integrisan višestepeni planetni reduktor (i do 1:2548), PWM upravljanje • Step motori, 1 upravljački impuls odgovara pomeraju za 1 korak, pun krug podeljen na korake Karakteristični režimi rada - a: Idealni trapezni profil brzine - b: Problem usporenja - ubrzanja - c: Pojave - overshoot, hunting - d: Optimalni, S profil brzine motora
35 Klasifikacija digitalnih senzora pomeraja APSOLUTNI (kodirani) ENKODERI: merenje ugla od 0 do 360° ili do punih 1000 obrtaja. Vrsta AD konvertora. Na cilindričnoj ploči se sistemom fotoćelije prijemnik – predajnik očitavaju kodovi za binarni zapis. Spoljašnji prsten ima kod 2 0 , sledeći 2 1 itd ... U zavisnosti od osvetljenosti polja dobija se kod koji predstavlja ugaoni pomeraj. Koristi se Grejev kod da bi se sprečile greške pri očitavanju. RELATIVNI (inkrementalni) ENKODERI: kontinuirano merenje ugla (relativne pozicije) LINEARNI (direktni – merna letva) I OBRTNI (indirektni) enkoderi Zaštita od dejstva sile radijalno na vratilo enkodera, IP zaštita, otpornost na vibracije
- Page 1 and 2: 1 Koncepti automatizovanog pozicion
- Page 3 and 4: 3 Totalne stanice - tehnike merenja
- Page 5 and 6: 5 Totalne stanice - tehnike merenja
- Page 7 and 8: 7 Totalna stanica - ose, upravljane
- Page 9 and 10: 9 Totalna stanica - sistematske gre
- Page 11 and 12: 11 Totalne stanice - kretanje po os
- Page 13 and 14: 13 y2 y1 Totalne stanice - tip upra
- Page 15 and 16: 15 Nezavisne upravljačke petlje M
- Page 17 and 18: 17 Regulacija pozicije i brzine: ot
- Page 19 and 20: 19 Regulacija pozicije i brzine: ot
- Page 21 and 22: 21 Regulacija pozicije i brzine: br
- Page 23 and 24: 23 Totalne stanice - motion control
- Page 25: 25 Servo regulacija pozicije i brzi
- Page 28 and 29: 28 Direktno i indirektno merenje po
- Page 30 and 31: 30 Motion control - modovi kretanja
- Page 32: 32 Motion control - karakteristike
- Page 37 and 38: 37 APSOLUTNI ENKODERI - obrtni
- Page 39 and 40: 39 Inkrementalni enkoderi - primene
- Page 41 and 42: 41 Merenje brzine 1 METODE: a) enko
- Page 43 and 44: 43 Totalne stanice - princip merenj
- Page 45 and 46: 45 Totalne stanice - merenje rastoj
- Page 47 and 48: 47 Totalne stanice - ATR mod - prin
0<br />
c<br />
0<br />
v<br />
v<br />
34<br />
Totalne <strong>stanice</strong> - pogon osa, rezime<br />
Tr Tr<br />
Tc<br />
Tc<br />
v<br />
a) b)<br />
d)<br />
t<br />
t<br />
0<br />
0<br />
Poff<br />
v<br />
Pz<br />
Pz<br />
"Traženje"<br />
t<br />
c)<br />
t<br />
Tipovi motora<br />
• DC servo motori, upravljani strujom pobude ili<br />
rotora, linearna zavisnost promene upravljačkog<br />
napona i brzine<br />
• Brushless DC motori, specijalni (romboidni) tip<br />
namotaja, male dimenzije veliki električni moment<br />
i smanjeno dejstvo inercije, integrisan višestepeni<br />
planetni reduktor (i do 1:2548), PWM upravljanje<br />
• Step motori, 1 upravljački impuls odgovara<br />
pomeraju za 1 korak, pun krug podeljen na<br />
korake<br />
Karakteristični režimi rada<br />
- a: Idealni trapezni profil brzine<br />
- b: Problem usporenja - ubrzanja<br />
- c: Pojave - overshoot, hunting<br />
- d: Optimalni, S profil brzine motora


