Koncepti automatizovanog pozicioniranja totalne stanice
Koncepti automatizovanog pozicioniranja totalne stanice Koncepti automatizovanog pozicioniranja totalne stanice
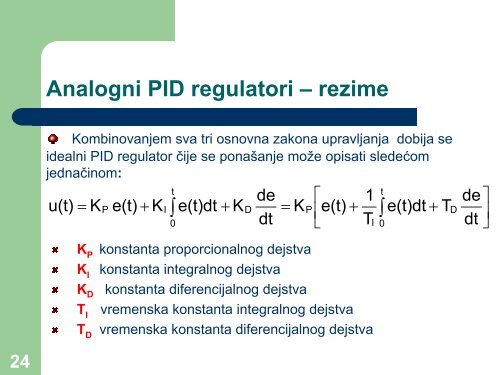
24 Analogni PID regulatori – rezime Kombinovanjem sva tri osnovna zakona upravljanja dobija se idealni PID regulator čije se ponašanje može opisati sledećom jednačinom: t t de ⎡ 1 = KP e(t) + KI ∫ e(t)dt + KD = KP ⎢e(t) + ∫ e(t)dt + T 0 dt ⎣ TI 0 u(t) D K P konstanta proporcionalnog dejstva K I konstanta integralnog dejstva K D konstanta diferencijalnog dejstva T I vremenska konstanta integralnog dejstva T D vremenska konstanta diferencijalnog dejstva de⎤ dt ⎥ ⎦
25 Servo regulacija pozicije i brzine 2 Tri regulacione petlje: strujna, brzinska i poziciona Spoljašnja petlja: Regulacija pozicije, (PID), merenje pozicije enkoderom Središnja petlja: Regulacija brzine, PI regulacija, V-Kvf vrednost upravljanja u ustaljenom stanju (bez poremećaja), ako je greška nula da strujni regulator nema ulaz 0, ograničava se vrednost struje, merenje brzine enkoderom ili tahogenerat., prelazni režim struje je završen pre procesa regulacije brzine Unutrašnja petlja: Strujni regulator, PI regulacija, dinamika strujnih procesa je mnogo brža nego kod mehaničkih, finija regulacija, povratna sprega merenjem struje, pretvara se naponsko upravljanje u strujno
- Page 1 and 2: 1 Koncepti automatizovanog pozicion
- Page 3 and 4: 3 Totalne stanice - tehnike merenja
- Page 5 and 6: 5 Totalne stanice - tehnike merenja
- Page 7 and 8: 7 Totalna stanica - ose, upravljane
- Page 9 and 10: 9 Totalna stanica - sistematske gre
- Page 11 and 12: 11 Totalne stanice - kretanje po os
- Page 13 and 14: 13 y2 y1 Totalne stanice - tip upra
- Page 15 and 16: 15 Nezavisne upravljačke petlje M
- Page 17 and 18: 17 Regulacija pozicije i brzine: ot
- Page 19 and 20: 19 Regulacija pozicije i brzine: ot
- Page 21 and 22: 21 Regulacija pozicije i brzine: br
- Page 23: 23 Totalne stanice - motion control
- Page 28 and 29: 28 Direktno i indirektno merenje po
- Page 30 and 31: 30 Motion control - modovi kretanja
- Page 32: 32 Motion control - karakteristike
- Page 35 and 36: 35 Klasifikacija digitalnih senzora
- Page 37 and 38: 37 APSOLUTNI ENKODERI - obrtni
- Page 39 and 40: 39 Inkrementalni enkoderi - primene
- Page 41 and 42: 41 Merenje brzine 1 METODE: a) enko
- Page 43 and 44: 43 Totalne stanice - princip merenj
- Page 45 and 46: 45 Totalne stanice - merenje rastoj
- Page 47 and 48: 47 Totalne stanice - ATR mod - prin
24<br />
Analogni PID regulatori – rezime<br />
Kombinovanjem sva tri osnovna zakona upravljanja dobija se<br />
idealni PID regulator čije se ponašanje može opisati sledećom<br />
jednačinom:<br />
t<br />
t<br />
de ⎡ 1<br />
= KP<br />
e(t) + KI<br />
∫ e(t)dt + KD<br />
= KP<br />
⎢e(t)<br />
+ ∫ e(t)dt + T<br />
0 dt ⎣ TI<br />
0<br />
u(t) D<br />
K P konstanta proporcionalnog dejstva<br />
K I konstanta integralnog dejstva<br />
K D konstanta diferencijalnog dejstva<br />
T I vremenska konstanta integralnog dejstva<br />
T D vremenska konstanta diferencijalnog dejstva<br />
de⎤<br />
dt<br />
⎥<br />
⎦


