

pid-ile-kontrolor-tasarim - 320Volt
pid-ile-kontrolor-tasarim - 320Volt
pid-ile-kontrolor-tasarim - 320Volt
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
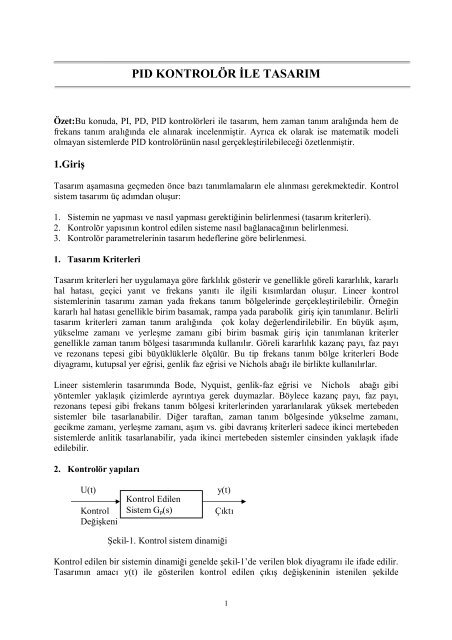
PID KONTROLÖR İLE TASARIMÖzet:Bu konuda, PI, PD, PID kontrolörleri <strong>ile</strong> tasarım, hem zaman tanım aralığında hem defrekans tanım aralığında ele alınarak incelenmiştir. Ayrıca ek olarak ise matematik modeliolmayan sistemlerde PID kontrolörünün nasıl gerçekleştir<strong>ile</strong>b<strong>ile</strong>ceği özetlenmiştir.1.GirişTasarım aşamasına geçmeden önce bazı tanımlamaların ele alınması gerekmektedir. Kontrolsistem tasarımı üç adımdan oluşur:1. Sistemin ne yapması ve nasıl yapması gerektiğinin belirlenmesi (tasarım kriterleri).2. Kontrolör yapısının kontrol ed<strong>ile</strong>n sisteme nasıl bağlanacağının belirlenmesi.3. Kontrolör parametrelerinin tasarım hedeflerine göre belirlenmesi.1. Tasarım KriterleriTasarım kriterleri her uygulamaya göre farklılık gösterir ve genellikle göreli kararlılık, kararlıhal hatası, geçici yanıt ve frekans yanıtı <strong>ile</strong> ilgili kısımlardan oluşur. Lineer kontrolsistemlerinin tasarımı zaman yada frekans tanım bölgelerinde gerçekleştir<strong>ile</strong>bilir. Örneğinkararlı hal hatası genellikle birim basamak, rampa yada parabolik giriş için tanımlanır. Belirlitasarım kriterleri zaman tanım aralığında çok kolay değerlendir<strong>ile</strong>bilir. En büyük aşım,yükselme zamanı ve yerleşme zamanı gibi birim basmak giriş için tanımlanan kriterlergenellikle zaman tanım bölgesi tasarımında kullanılır. Göreli kararlılık kazanç payı, faz payıve rezonans tepesi gibi büyüklüklerle ölçülür. Bu tip frekans tanım bölge kriterleri Bodediyagramı, kutupsal yer eğrisi, genlik faz eğrisi ve Nichols abağı <strong>ile</strong> birlikte kullanılırlar.Lineer sistemlerin tasarımında Bode, Nyquist, genlik-faz eğrisi ve Nichols abağı gibiyöntemler yaklaşık çizimlerde ayrıntıya gerek duymazlar. Böylece kazanç payı, faz payı,rezonans tepesi gibi frekans tanım bölgesi kriterlerinden yararlanılarak yüksek mertebedensistemler b<strong>ile</strong> tasarlanabilir. Diğer taraftan, zaman tanım bölgesinde yükselme zamanı,gecikme zamanı, yerleşme zamanı, aşım vs. gibi davranış kriterleri sadece ikinci mertebedensistemlerde anlitik tasarlanabilir, yada ikinci mertebeden sistemler cinsinden yaklaşık ifadeed<strong>ile</strong>bilir.2. Kontrolör yapılarıU(t)KontrolDeğişkeniKontrol Ed<strong>ile</strong>nSistem G p (s)y(t)ÇıktıŞekil-1. Kontrol sistem dinamiğiKontrol ed<strong>ile</strong>n bir sistemin dinamiği genelde şekil-1’de ver<strong>ile</strong>n blok diyagramı <strong>ile</strong> ifade edilir.Tasarımın amacı y(t) <strong>ile</strong> göster<strong>ile</strong>n kontrol ed<strong>ile</strong>n çıkış değişkeninin isten<strong>ile</strong>n şekilde1
davranmasıdır. Sorun temelde tasarım amaçlarının tümü gerçekleşecek biçimde u(t) kontrolişaretini belirli bir zaman aralığında belirtmektedir.Tasarım yönteminde, tasarımcı kontrolörünü kontrol ed<strong>ile</strong>n prosese göre nereye yerleştirmesigerektiğini genellikle önceden belirler ve sisteme sabit yapıda bir tasarım uygular. Budurumda sorun kontrolör elemanlarını belirlemeye dönüşür.Yaygın olarak kullanılan kontrol yapıları: Seri kompanzasyon Geribeslemeli kompanzasyon Durum geribeslemeli kompanzasyon Seri-geribeslemeli kompanzasyon İleri beslemeli kompanzasyonBu kontrol yapılarının içerisinde en yaygın kullanılanı seri kompanzasyon olup yapısı şekil-2de gösterilmiştir.r(t) e(t)KONTROLÖR KONTROLy(t)G c (s)EDİLEN SİSTEMG p (s)Şekil-2. Seri kompanzasyonYukarıdaki kompanzasyon yapıları içinde PID kontrolörü yaygın uygulama alanı bulan veetkin işaretin oransal, integral ve türevsel bir b<strong>ile</strong>şimini sisteme uygulayan bir kontroldür. Buişaret b<strong>ile</strong>şenleri zaman tanım bölgesinde kolaylıkla gerçekleştirilip görüntülenebildiğinden,PID kontrolü genellikle zaman tanım bölgesi yöntemleri <strong>ile</strong> tasarlanır.3. Tasarım ilkeleriBelirli bir kontrolör yapısı seçildikten sonra, tasarımcı tüm tasarım koşullarını gerçekleyen birkontrolör türünü, eleman değerleri <strong>ile</strong> birlikte belirlenmelidir. Mühendislik uygulamalarıgereği tüm tasarım koşullarını sağlayan en basit yapılı kontrolörün seçimi tercih edilir.Genellikle kontrolörün karmaşıklığı artıkça fiyatı artar, güvenirliği azalır ve tasarımı güçleşir.Bir kontrolde karar kıldıktan sonra ikinci adım kontrolör parametre değerlerini belirlemektir.Bu parametre değerleri kontrolörü oluşturan bir yada daha fazla transfer fonksiyona ilişkinkatsayılardır.Tasarım, zaman yada frekans, hangi tanım bölgesinde sürdürülürse sürdürülsün , bazı yöntemyada tasarım kurallarını izlemelidir. Zaman tanım bölgesi tasarımın özellikle s-düzlemine vekök eğr<strong>ile</strong>rine dayandığını göz önünde bulundurulmalıdır. Frekans tanım bölgesi tasarımındaise, çevrim transfer fonksiyonu genlik ve faz etk<strong>ile</strong>nerek, kriterler sağlatmaya çalışılır.Tasarımda kullanılmak amacıyla zaman ve frekans tanım bölgesi özelliklerini özetlemekteyarar vardır:2
1. Kapalı çevrim transfer fonksiyonunda karmaşık eşlenik kutuplar az sönümlü basamakyanıtlarına neden olur. Tüm kutupların gerçek olması durumunda birim basamak yanıtıaşırı sönümlüdür. Ancak, kapalı çevrim transfer fonksiyonundaki sıfırlar, sistem aşırısönümlü olsa b<strong>ile</strong>, aşıma neden olabilir.2. Sistem yanıtı, s-düzleminde koordinat merkezine en yakın kutuplar tarafından belirlenir.Sola doğru uzaklaşan kutuplar geçici yanıtta daha hızlı söner.3. Baskın sistem kutupları s-düzleminde sola doğru uzaklaştıkça, sistem yanıtı hızlanır vebandgenişliği artar.4. Baskın sistem kutupları s-düzleminde sola doğru uzaklaştıkça, iç işaret genlikleri büyür vesistemin işletim masrafı artar. Bu her ne kadar analitik doğrulansa da, bir çiviye çekiçledaha sert vurulduğunda, çivinin daha fazla ötelendiği ve her darbede daha fazla enerjiyeihtiyaç duyulduğu gerçeğinden kaynaklanır. Benzer şekilde bir spor arabasının ivmesifazladır, ancak normal bir arabaya göre daha fazla yakıt harcar.5. Sistem transfer fonksiyonunda bir sıfır bir kutbun yanında yer alması halinde, kutupsistem yanıtını çok küçük bir genlikle etk<strong>ile</strong>r (sıfır-kutup silmesi).6. Zaman ve frekans tanım bölgesi kriterleri kendi aralarında ilişkilidir. Yükselme zamanı vebandgenişliği ters orantılıdır. Faz payı, kazanç payı, rezonans tepesi ve sönüm oranı tersorantılıdır.2. Zaman ve Frekans Tanım Bölgesi KriterleriAnaliz problemlerinde sistemlere referans giriş işaretleri uygulanır ve bu işaretlere ver<strong>ile</strong>nyanıtlar incelenerek sistemlerin davranışı değerlendirilmeye çalışılır. Bir kontrol sistemindeeğer çıkış işareti giriş işaretini belirli koşullar altında takip etmesi isteniyorsa, giriş ve çıkışişaretleri zaman fonksiyonu olarak karşılaştırılır. Bu nedenle kontrol sistemlerinde sistemdavranışının son değerlendirilmesi genellikle hep zaman alanında yapılır.Bir kontrol sisteminin zaman yanıtı genellikle iki kısımdan oluşur: geçici hal yanıtı ve süreklihal yanıtı. Eğer y(t) bir sürekli sistem yanıtını ifade ediyorsa, y t (t) geçici yanıtı ve y ss (t)sürekli yanıtı ifade etmek üzere, genelde y(t)= y t (t) + y ss (t) yazılabilir. Kontrol sistemlerindegeçici hal yanıtı, zaman yanıtının, zaman <strong>ile</strong>rledikçe sıfıra doğru giden kısmı olaraktanımlanır. buna göre y t (t)özelliklidir.lim y t(t) 0t Sürekli hal yanıtı ise, geçici hal yanıtı söndükten sonra, zaman yanıtının geriye kalankısmıdır.2.1. Birim Basamak Yanıtı ve Zaman Tanım Bölgesi Kriterleri3
Geçici hal, daha önce belirtildiği gibi, sistem yanıtının zaman <strong>ile</strong>rledikçe sıfıra giden kısmıolarak tanımlanır. Bir kontrol sisteminde geçici hal yanıtının genliği ve süresi katlanabilir birsınırın altında tutulmalıdır.Doğrusal kontrol sistemlerinde geçici hal yanıtının değerlendirilmesi genellikle u s (t) birimbasamak yanıtından yararlanılarak yapılır. Kontrol sisteminin birim basamak girişe cevabıbirim basamak yanıtı olarak adlandırılır. Şekil-3 de doğrusal bir kontrol sisteminin örnekselbirim basamak yanıtı görülmektedir.Şekil-3. Birim basamak Yanıtı.Şekil-4 te gösterildiği gibi, ikinci mertebeden bir sistem ele alındığında, birim basmak yanıtı<strong>ile</strong> ilgili olarak kontrol sistemlerinin zaman tanım bölgesi özellikleri, formüllerle aşağıdakidavranış kriterleri <strong>ile</strong> değerlendirilir.2r(t) e(t) wny(t)-s(s 2wn)+Şekil-4. İkinci mertebeden sistem dinamiği1. En büyük aşım. Y(t) birim basamak yanıtı olmak üzere, y(t)’nin en büyük değeri y max vesürekli hal değeri y ss <strong>ile</strong> belirlenmiş olsun. Buna göre en büyük aşım=y max -y ss olaraktanımlanır ve denklem-2.1 <strong>ile</strong> gösterilir.Y max -1= 21 e (2.1)2. Gecikme zamanı. Gecikme zamanı t d basamak yanıtının son değerinin yüzde 50 değerineulaşma zamanı olarak tanımlanır ve denklem-2.2 <strong>ile</strong> gösterilir.4
1 0.7td , 0 1.0(2.2)wn3. Yükselme zamanı. Yükselme zamanı t r , basmak yanıtının son değerin yüzde 10değerinden yüzde 90 değerine ulaşma zamanı olarak tanımlanır ve denklem-2.3 <strong>ile</strong>gösterilir.0.8 2.5tr , 0 1.0(2.3)wn4. Yerleşme zamanı. Yerleşme zamanı t s , basmak yanıtı son değerinin belirli bir yüzdesinekadar azalması ve bu değerin altında kalması için geçmesi gereken zaman olaraktanımlanır ve denklem-2.4 <strong>ile</strong> gösterilir. Yüzde 5 çok kullanılan bir değerdir.3.24.5ts , 0 0.69ts , 0.69 (2.5)wwn2.2. Frekans Tanım Bölgesi KriterleriUygulamada bir kontrol sisteminin davranışı, en gerçekçi ve doğru olarak ancak zaman tanımbölgesi kriterleri <strong>ile</strong> belirlenir. Bunun nedeni, kontrol sistemlerinde davranışların genelliklesisteme uygulanan test işaretleri etkisinde sistem yanıtlarına göre değerlendirilir. Fakatyüksek mertebeden kontrol sistemlerinde zaman tanım bölgesi yanıtlarına ilişkin analitikifadelerin çok zor elde edilmektedir. Diğer taraftan frekans tanım bölgesinde düşükmertebeden sistemlerle sınırlı kalmayan çok sayıda grafiksel yöntem bulunmaktadır. Kontrolsistemlerinin analiz ve tasarımların frekans bölgesinde yapılmasının nedenlerin başındakolaylık ve uygun analitik yöntemlerinin olmasıdır.Kapalı çevrimli bir sistemin frekans yanıtını tanımlayacak olursak, bilindiği gibi tek çevrimlibir kontrol sisteminin kapalı çevrim fonksiyonuY(s) G(s)M(s)= = şeklindedir.R(s) 1+G(s)H(s)Sinüsoidal sürekli halde s= j yazıldığında sinüsoidal sürekli hal M(j) transfer fonksiyonuM(j)= M(j) M(j) şeklinde genlik ve faz olarak tanımlanır.M(s) bir elektrik filtresinin giriş-çıkış transfer fonksiyonu ifade etmesi halinde, M(j)’ nıngenlik ve fazı filtrenin giriş işaretini filtreleme özelliğini belirler. Şekilde c frekansındakeskin kesme özelliği olan ideal bir alçak geçiren bir filtrenin genlik ve faz karakteristiğigörülmektedir. Kontrol sistemlerinin tasarımı pek çok yönden filtre tasarımına benzer vekontrol sistemi bir işaret işlemcisi gibi değerlendir<strong>ile</strong>bilir.0 M(j)n0 c M (j)5
Frekans tanım bölgesi yöntemleri kullanılarak tasarlanan doğrusal kontrol sistemlerindesistemlerin davranışlarını belirlemek için bir dizi kriter tanımlamak gerekir. En büyük aşımsönüm oranı gibi zaman bölgesinde tanımlanmış kriterler frekans tanım bölgesinde doğrydankullanılamaz. Fakat frekans tanım bölgesinde kullanılan kriterler aşağıda verilmiştir.Rezonans Tepesi M rM r rezonans tepesi M(j) ‘ nin maksimum değeridir. Genelde M r genliği bize görelikararlılığı hakkında bilgi verir. Genellikle büyük bir M r sistem basamak yanıtında büyük biraşıma karşı düşer. Uygulamada kontrol sistemlerinde rezonans tepesi 1.1 <strong>ile</strong> 1.5 arasındabulunması istenir. İkinci mertebeden sistemlerde rezonans tepesi ’nin fonksiyonu olarakdenklem-2.6 <strong>ile</strong> ifade edilir.1Mr 0.707 (2.6)221 M(j)Bandgenişliği BG M (j)Şekil-5 Rezonans Tepesi.BG bandgenişliği M(j) ‘nın sıfır frekansına göre yüzde 70.7 ya da 3 dB düştüğüfrekanstır. Genelde bandgenişliği kontrol sisteminin zaman tanım bölgesinde geçici hal yanıtıhakkında bilgi verir. Büyük bandgenişliği yüksek frekanslı işaretlerin sistemden <strong>ile</strong>tilmesiniolanak kıldığından, kısa yükselme zamanına düşer. Bandgenişliğinin küçük olması sistemdensadece göreli düşük frekanslar aktarılabilir ve sistemin zaman yanıtı ağırlaşır. Buna göreikinci mertebeden bir sistemin bandgenişliği denklem-2.7 <strong>ile</strong> ifade edilir.24 21 24 4 2 1/ 2BG (2.7)buna göre ikinci mertebeden sistemlerde terimler arasındaki ilişkiyi özetleyecek olursak: Bandgenişliği ve yükselme zamanı ters orantılıdır. Bandgenişliği arttıkça sistem yanıtı hızlanır. n arttıkça bandgenişliği artar yükselme zamanı azalır. arttıkça bandgenişliği azalır ve yükselme zamanı artar.6
Göreli Kararlılık: Kazanç Payı ve Faz PayıTasarımcı sistemin mutlak kararlılığı kadar ne kadar kararlı olduğu <strong>ile</strong> de ilgilidir. Bu kavramgenellikle göreli kararlılık olarak bilinir. Zaman tanım bölgesinde göreli kararlılık aşım vesönüm oranı gibi parametrelerle ölçülür. Frekans tanım bölgesinde ise M r rezonans tepesi <strong>ile</strong>ifade edilir.Kazanç payı ve faz payının bode diyagramı üzerinde gösterilişi şekil-6’da verilmiştir.3. PD Kontrolörüyle TasarımŞekil-6. Bode diyagramı kriterleri.Bir kontrol işleminde, kontrol işareti kontrolör çıkışına sabit bir oranla aktarıldığında, oransalkontrol olarak adlandırılır. Sezgisel olarak, oransal işleve ilave olarak, giriş işaretinintürevinden veya integralinden de yararlanılabilir. Uygulamada çok sık kullanılan PIDkontrolörü, oransal (P=Proportional), integral (I=Integral) vr türevsel (D=Derivative)işlevleri ifade eden kelimelerin baş harfleriyle adlandırılır. Bu kontrolörleri özümseyebilmekiçin önce PD kontrolörünü göz önüne alalım.Şekil 3-1 deki geribeslemeli bir kontrol sistemine ait blok diyagramında, kontrol ed<strong>ile</strong>nsistemin transfer fonksiyonuG p (s)=w2ns(s 2wn)(3.1)İkinci mertebeden bir örnek sistem olarak verilmiş olsun. Seri kontrolör transfer fonksiyonuG c (s)= K p +K D sŞeklinde oransal-türevsel (PD) türdendir. Buna göre sisteme uygulanan kontrol işareti, K p veK D orantı ve türev katsayıları olmak üzere,7
şeklindedir.de(t)u( t) Kpe(t) KD(3.2)dtR(s) E(s) U(s) Y(s)K p2wns(s 2wn)K D sŞekil-3.1. PD Kontrol sistemi blok diyagramıUygun tasarlanmış bir PD kontrolörü kontrol sistem davranışını şu şekilde etk<strong>ile</strong>r:sönümü arttırır ve en büyük aşımı azaltır.Yükselme zamanı ve yerleşme zamanı azaltır.Bandgenişliğini arttırır.Kazanç payı, faz payı ve rezonans tepesini düzeltir.Yüksek frekans gürültüsünü arttırabilir.Az sönümlü ya da kararsız sistemlerde etkili olmaz.Devrenin tasarımında göreli büyük kapasitelere ihtiyaç duyabilir.Aşağıdaki örnekte ikinci mertebeden bir sistemin PD kontrolörüyle zaman ve frekans tanımbölgesinde nasıl etk<strong>ile</strong>ndiği tartışılacaktır.Örnek:Transfer fonksiyonu4500KG P( s)(3.3)s(s 361.2)olarak ver<strong>ile</strong>n ikinci mertebeden bir kontrol sisteminin davranış kriterleri aşağıdaki şekildeseçildiğini varsayalım: Birim basamak girişe karşı kararlı hal hatası 0.000443 Aşım %5 Yükselme zamanı t r 0.005 saniye Yerleşme zamanı t s 0.005 saniyeKararlı hal hataları <strong>ile</strong> ilgili kriterleri sağlamak için K kazancı:4500K1KV lim s.GP(s) K 181.17 olmalıdır. Ancak bu K değeri içins 0 361.2 0.000443sistemin sönüm oranı 0.2 ve aşım %52.7’ dir. Birim basamak yanıtında kararlı hal hatası0.000443 kalacak, sistemin sönüm oranı ve en büyük aşım düzelecek şekilde sisteme bir seriPD kontrolörü uygulayalım.8
Zaman Tanım Bölgesi TasarımıPD kontrolörü ve K=181.17 için sistem <strong>ile</strong>ri yol transfer fonksiyonu815265( Kp KDs)G(s) GP ( s)GC( s)(3.4)s(s 361.2)olarak elde edilir. Bu durumda kapalı çevrim transfer fonksiyonu:y(s)815265( Kp KDs) (3.5)2r(s)s (361.2 815265K) s 815265KDpve hız katsayısı815265KpKv lim sG(s) 2257. 1Ks 0 361.2p(3.6)şeklindedir. Birim basamak rampa girişi için kararlı hal hatası e ss =1/K v =0.000443/K p olarakhesaplanır. Kapalı çevrim transfer fonksiyonunda görüldüğü gibi PD kontrolörü sistemi ikişekilde etk<strong>ile</strong>r:1. Kapalı çevrimli sisteme s=-K p /K D ’ de bir sıfır ekler.2. s teriminin çarpanı 361.2’ den 361.2+815265K D ’ arttırarak sönüm oranını etk<strong>ile</strong>r.Karakteristik denklems 2 +(361.2+815265K D )s+815265K p =0 (3.7)şeklinde yazılır. Kararlı hal hatası <strong>ile</strong> ilgili koşul sağlandığına göre K p =1 olarak seç<strong>ile</strong>bilir. Budurumda, sistemin sönüm oranı361.2 815265KD 0.2 451.46KD(3.8)1805.84ilişkisinde görüldüğü gibi, K D sönümü davranışı olumlu yönde etk<strong>ile</strong>r. Eğer =1 ya da sönümoranının kritik olması istenirse K D =0.001772 olması gerektiği görülür. Ancak denklem-3.4artık ikinci mertebeden bir sistemi ifade etmediğini belirtmek gerekir. Geçici yanıt transferfonksiyonunun s=-K p /K D sıfırıyla da etk<strong>ile</strong>nir. Bu ikinci mertebeden sistemde K D arttıkçasıfır koordinatına doğru yaklaşır ve neticede G(s)’in s=0’ daki kutbunu s<strong>ile</strong>r. Buna göre K Darttıkça denklem-3.4’ teki transfer fonksiyonu, kutbu s=-361.2’de bulunan, birincimertebeden bir sisteme dönüşür ve aşım oluşmaz. Yüksek mertebeden sistemlerde s=-K p /K Dsıfırı K D arttıkça genellikle aşımın artmasına neden olur.Denklem-3.7’ deki karakteristik denkleminde K p ve K D değişiminin etkisini incelemek içinkök çevreleri yöntemi uygulanabilir. Karakteristik denklemde K D sıfıra eşitlenirses 2 +361.2s+815265K p =0 (3.9)elde edilir. K p 0 <strong>ile</strong> arasında değiştirilirse şekil-3.2’ de görülen kök yer eğrisi elde edilir.9
Şekil-3.2. PD kontolör için kök eğrisiK D 0 için 3.7’ nolu karakteristik denklemeden815265KD1 Geş 1=0 (3.10)2s 361.2s 815265Kpseşdeğer denklemi yazılabilir. K p sabit K D değişken kök çevreleri G eş (s)’in kutup sıfıryerleşimine göre oluşturulur. Şekil-3.3’ de K P =0.25 ve K P =1 için çizimler verilmiştir. K P =1ve K D =0 için karakteristik denklemin köklerinin –180.6+j884.67 ve –180.6-j884.67 ve kapalıçevrim sönüm oranının 0.2 olduğu görülür. K D değeri arttıkça karakteristik denklemin kökleribir daire yayını izleyerek gerçek eksene doğru yaklaşır. K D nin değeri 0.00177’ye ulaşıncakritik sönüme karşı düşen –902.92 değerine eşit gerçek kökler elde edilir. K D değişkeni0.00177’nin ötesinde arttırılırsa, karakteristik denklemin farklı gerçek kökleri için sistem aşırısönümlüdür. Şekil-3.4’te PD kontrolsüz ve K P =1, K D =0.00177 için birim basamak yanıtıgörülmektedir. Tablo-3.1 deki yükselme ve yerleşme zamanı kriterlerinin tümü K D 0.0017710
için sağlanır. Özet olarak PD kontrolörü genellikle en büyük aşımı, yükselme zamanı veyerleşme zamanını azaltır.Şekil-3.3 Kd’ nin iki farklı değeri için kök eğrisiTablol-3.1. PD kontrolör örneğine ilişkinparametre değerleriK Dt r[saniye]t s[saniye]0 0.00125 0.0151 52.20.0005 0.0076 0.0076 25.70.00177 0.00119 0.0049 4.20.0025 0.00103 0.0013 0.7Aşım[%]11
Şekil-3.4. PD kontrolör sistem cevabıFrekans Tanım Bölgesi TasarımıAşağıdaki davranış kriterlerinin verildiğini varsayalım: Birim rampa girişe karşı kararlı hal hatası 0.000443 Faz payı 80 0 Rezonans Tepesi Mr 1.05 BG 2000 rad/snK P =1, K D =0, 0.005, 0.00177 ve 0.0025 için G(s)’ ye ilişkin Bode diyagramları Şekil-3.5’degösterilmiştir.12
Şekil-3.5. PD kontrolörünün Bode diyagramı13
Sistemin davranış kriter ölçüleri karşılaştırmak amacıyla zaman tanım bölgesi kriter değerleri<strong>ile</strong> birlikte çeşitli kontrolör parametreleri için tablo-3.2’de listelenmiştir.Tablo-3.2 PD kontrolörününfrekans tanım bölgesi kriterleriK D KP FP KGF BG M r t r t s Aşım0 22.68 868 1370 2.522 0.00125 0.0151 52.20.0005 46.2 913.5 1326 1.381 0.0076 0.0076 25.70.00177 82.92 1502 1669 1.025 0.00119 0.0049 4.20.0025 88.95 2046 2083 1.000 0.00103 0.0013 0.7Kritik çözüme karşı düşen K D =0.00177 için faz payı FP=82.92 0 ve rezonans tepesi M r =1.025ve bandgenişliği BG=1669 rad/sn’ dir. Bu durumda frekans tanım bölgesi kriterlerinin tümüsağlanır.4. PI Kontrolörüyle TasarımPD kontrolörünün sistemin sönümünü ve yükselme zamanını, daha büyük band genişliği verezonans frekansı uğruna düzelttiği ve birim basamak girişinde görüldüğü gibi zamanladeğişmeyen girişlerde kontrolörün kararlı hal hatalarını etk<strong>ile</strong>mediği görülmüştü. Buna görePD kontrolü öngörülen hedefleri sağlamayabilir.PID kontrolörünün integral kısmı kontrolör giriş işaretinin zaman integrali <strong>ile</strong> orantılı birişaret üretir. Şekil-4.1’de seri PI kontrolörü ikinci mertebeden örnek bir kontrol sistemigörülmektedir. PI kontrolörünün transfer fonksiyonuşeklindedir.KIGc( s) KP(4.1)sR(s) E(s) U(s) Y(s)K p2wns(s 2wn)K IsŞekil – 4.1. PI kontrolör blok diyagramıUygun tasarlanmış bir PI kontrolörü kontrol sistem davranışını şu şekilde etk<strong>ile</strong>r:sönümü düzeltir ve aşımı azaltır.Yükselme zamanını artırır.Bandgenişliğini azaltır.Kazanç payı, faz payı ve rezonans tepesini iy<strong>ile</strong>ştirir.Yüksek frekans gürültülerini süzer.Kontrolör devresindeki kapasite değerinin çok büyük olmaması için uygun seçilmesigereken K I ve K P değerleri PD kontrolünde daha sınırlıdır.14
Aşağıdaki örnekte ikinci mertebeden bir sistemin PD kontrolörüyle zaman ve frekans tanımbölgesinde nasıl etk<strong>ile</strong>ndiği tartışılacaktır.Örnek:Transfer fonksiyonu4500KG P( s)(4.2)s(s 361.2)olarak ver<strong>ile</strong>n bir sisteme, PI kontrolörü uygulanırsa sistemin <strong>ile</strong>ri yol transfer fonksiyonu:4500KKP(s KI/ KP)G( s) Gc ( s)Gp(s)(4.3)2s ( s 361.2)olarak elde edilir.Zaman Tanım Bölgesi TasarımıZaman tanım bölgesi kriterleri şu şekilde belirlenmiş olsun: Parabolik giriş işareti t 2 u s (t)/2 için kararlı hal hatası 0.2 Aşım %5 Yükselme zamanı t r 0.01 saniye Yerleşme zamanı t s 0.02 saniyeBu sistemi anlamlı tasarlayabilmek için yükselme ve yerleşme zamanlarını gevşetmemizgerekir.İvme hata katsayısı4500KKIKa lim s2 G(s) 12.46s 0361.2KKI(4.4)Olarak elde edilir. Parabolik giriş için kararlı hal hatasıe 1 0.08026ss ( 0.2)K KK(4.5)aIşeklindedir. PD kontrolöründe kullanılmış olan K=181.17 değerini seçelim. Parabolik girişiçin belirli bir kararlı hal hatasını sağlamak için K büyük tutuldukça K I küçülebilir. Eğer (4.5)nolu ilişkide 0.2 en küçük kararlı hal hatası koşulu ve K=181.17 için çözülürse, K I ‘ nınalab<strong>ile</strong>ceği en küçük değer 0.002215 olarak elde edilir. Gerekirse K değerinde <strong>ile</strong>rideayarlama yapılabilir. K=181.17 için kapalı çevrim sisteminin karakteristik denklemi32s 361.2s 815265Ks 815265K 0 (4.6)pIbulunur. Routh testi uygulanırsa sistemin 0 K I /K P 361.2 için karalı olduğu görülür. Bunagöre G(s) in sıfırı s=- K I /K P , s-düzleminde çok fazla sola yerleştir<strong>ile</strong>mez. Aksi halde sistemkararsız hale gelir. Bu nedenle -K I /K P sıfırı koordinat merkezine yakın yerleştirilir. Buna göreK I /K P oranı15
KI 361.2(4.7)KPkoşulu sağlanacak şekilde seçilmelidir. K I /K P =10 için kök eğrisi şekilde görülmektedir. 4.7nolu denklem şartı sağlandığında (4.3) nolu denklem815265KPG(s)(4.8)s(s 361.2)yaklaşık ifade ed<strong>ile</strong>bilir. Göreli sönüm oranının 0.707 olmasını istediğimizi varsayalım. Busönüm oranı için K P nin (4.8) ilişkisinde 0.08 olması gerektiği hesaplanır. Şu halde K P =0.08,K I =0.8 için şekil-4.2’ deki kök eğrisi iki karmaşık kökün göreli sönüm oranını yaklaşık 0.707olarak verilir. Bu durumda karakteristik denklemin üç kutbus 1 =-10.605 s 2 =-175.3+j175.4 s 3 =-175.3-j175.4olarak elde edilir. K P =0.08 ve K I değeri (4.7) nolu koşulu sağladığı sürece karmaşıkkutupların göreli sönüm oranı 0.707 ye yakın kalır.Şekil-4.2. PI kontrolöre ilişkin kök eğrisiTablo-4.1’de sönüm oranı, 0.707, K P =0.08 ve çeşitli K I /K P değerlerine karşı gelen PIkontrolörlü sistemin birim basamak yanıtına ilişkin değerler verilmiştir. Tablodaki sonuçlar,16
PI kontrolünün en büyük aşım yükselme zamanı uğruna azalttığı görülmüştür. Tabloda K I 1için yerleşme zamanında ani bir azalma görülür. K P yi 0.08 den küçük seçerek aşımazaltılabilir fakat yükselme ve yerleşme zamanları artar.Tablo-4.1. PI kontrolör örneğine ilişkinparametre değerleriK I /K P K I K P Aşım (%) t r (s) t s (s)0 0 1.00 52.7 0.00135 0.01520 1.60 0.08 15.16 0.0074 0.04910 0.80 0.08 9.93 0.0078 0.02945 0.40 0.08 7.17 0.0080 0.0232 0.160 0.08 5.47 0.0083 0.01941 0.08 0.08 4.89 0.0084 0.01140.5 0.04 0.08 4.61 0.0084 0.01140.1 0.008 0.08 4.38 0.0084 0.0115Şekil-4.3’ de K P =0.08 ve çeşitli K I değerleri için PI kontrolörlü sistemin birim basamakyanıtı verilmiştir. Karşılaştırılmak için PD kontrolörüde eklenmiştir.Frekans Tanım Bölgesi TasarımıŞekil-4.3. PI kontrolörü sistem yanıtıÖzgün sistemin G(s) <strong>ile</strong>ri yol transfer fonksiyonu (4.9) ilişkisinde K P =1 ve K I =0 alınarak eldeedilir.4500KKP( s KI/ KP)G( s) Gc ( s)Gp( s)(4.9)2s ( s 361.2)17
Şekil-4.4’ de görülen Bode diyagramına göre özgün sistemin faz payı 22.68 0 ve kazanç geçişfrekansı 868 rad/s’dir.Ön görülen faz payının en az 65 0 olacağını kabul ederek PI kontrolörünü tasarlayalım. PIkontrolöründe aşağıdaki adımlar atılmalıdır.1. 65 0 faz payının gerçekleştiği yeni kazanç geçiş frekansı g | belirlenir. Şekil-4.4’te budeğerin 170 rad/s olduğu görülür. Bu frekansta G(j)’ nın modülü 21.5 dB’ dir. Bunagöre PI kontrolörü g | =170 rad/s’ de –21.5 dB lik zayıflama getirmelidir. Bunun eldeedilmesi için:K P 10|g G(j)dB/ 20 1021.5 / 20 0.084(4.10)elde edilir. Daha önceki zaman tanım bölgesinde K P değerinin 0.08 olarak seçildiğihatırlanırsa, karmaşık karakteristik denklemin köklerine ilişkin göreli sönüm oranınınyaklaşık 0.707 olacağı görülür.2. Frekans tanım bölgesi sonuçlarını daha önceki zaman tanım bölgesi sonuçları <strong>ile</strong>karşılaştırabilmek için K P =0.08 seçilir. K P seçildiğinde K I nın seçilmesi gerektiğinibelirler. Buna göreKI|gK10P170*0.08 1.3610(4.11)alınmalıdır. Daha önce belirtildiği gibi K I /K P oranı G(s)’nin –361.2’ deki kutbun genliğindenyeterli derecede küçük olduğu sürece K I değeri değiştir<strong>ile</strong>bilir.Şekil-4.4’te K P =0.08 ve K I =0.008, 0.08 ve 1.6 için <strong>ile</strong>ri yol transfer fonksiyonuna ilişkin Bodediyagramları ve tablo-4.2’de ilgili frekans tanım bölgesi kriterleri görülmektedir. Yeterliderecede küçük K I /K P oranları için faz payı, M r , BG ve kazanç geçiş frekansı gibi değerlerinçok az değiştiği görülmektedir.Tablo-4.2.PI kontrolörününfrekans tanım bölgesi kriterleriK I /K P K I K P KP (dB) FP(derece)M r BG(rad/s)KGF(rad/s)FGF(rad/s)0 0 1.00 22.6 2.55 1390.87 868 20 1.6 0.08 58.45 1.12 268.92 165.73 10 0.8 0.08 61.98 1.06 262.38 164.96 5 0.4 0.08 63.75 1.03 258.95 164.77 1 0.08 0.08 63.15 1.01 256.13 164.71 0.1 0.008 0.08 65.47 1.00 255.49 164.70 18
Şekil-4.4. PI kontrolörüne ilişkin Bode diyagramı19
5. PID Kontrolörüyle TasarımÖnceki tartışmalarda PD kontrolünün sisteme zayıflama getirdiği ancak sistemin kararlı haldavranışını etk<strong>ile</strong>mediği görülmüştü. PI kontrolörünün ise, göreli kararlılığı ve aynı zamandakararlı hal hatalarını düzelttiği, ancak yükselme zamanının arttığı belirtilmişti. Bu sonuçlarbizi, PI ve PD kontrolörlerinin iyi yönlerinden yararlanmayı sağlayan, PID kontrolünükullanmaya yöneltir. PID kontrolörünün tasarımı için aşağıdaki yol izlenebilir.1. PID kontrolörü seri bağlı PI ve PD kısımlarından oluşur. PID kontrolörünün transferfonksiyonuGCKIK12( s) KP KDs (1 KD1s)(KP2 ) (5.1)ssşeklinde yazılabilir. PID kontrolünde sadece üç parametreye ihtiyaç olduğundan PDkısmının orantı katsayısı birim alınır. Denklem-5.1’in iki tarafı eşitlenirseK P = K P2 + K D1 K 12K D = K D1 K P2K I = K 12Elde edilir.2. Sadece PD kısmının etkin olduğunu varsayalım. K D1 değerini göreli kararlılığın birkısmı yerine gelecek şekilde seçilir. Zaman tanım bölgesinde bu göreli kararlılık enbüyük aşım ve frekans tanım bölgesinde faz payı <strong>ile</strong> değerlendirilir.3. K 12 ve K P2 parametreleri tüm göreli kararlılık koşulları sağlanacak şekilde seçilir.Örnek:Transfer fonksiyonu71.5 *10 KG P( s)(5.2)2s(s 3408.3s 1204000)olarak ver<strong>ile</strong>n üçüncü mertebeden bir sistemi göz önüne alalım. K=181.17 için transferfonksiyonuŞeklindedir.92.718*10G P( s)(5.3)s(s 400.26)( s 3008)20
Zaman Tanım Bölgesi TasarımıZaman tanım bölgesi kriterleri şu şekilde verilmiş olsun: Parabolik t 2 u s (t)/2 girişi için kararlı hal hatası 0.2, Aşım %5, Yükselme zamanı t r 0.005 saniye, Yerleşme zamanı t s 0.005 saniye.İlk olarak transfer fonksiyonu (1+K D1 s) olan PD kontrolörünün uygulandığını varsayalım. Budurumda <strong>ile</strong>ri yol transfer fonksiyonu92.718 *10 (1 KD!s)G(s) GP ( s)GC( s)(5.4)s(s 400.26)( s 3008)şekline gelir. Kapalı çevrim sisteminin karakteristik denklemi3299s 3408.3s (1204000 2.718 *10 KD) s 2.718 *10 0 (5.5)Şeklinde yazılabilir. Eşdeğer transfer fonksiyonu elde edilirseGeş92.718 *10 K s( s) D( s 3293.3)( s 57.49 j906.6)(s 57.49 j906.6)(5.6)elde edilir. Karakteristik denklemin G eş (s)’ in kutup-sıfırına göre şekil-5.1’ deki gibi eldeedilir.Buna göre K D1 =0.002 için % 11.37 lik en küçük aşım, yükselme zamanı=0.0008 ve yerleşmezamanı=0.00255 olarak elde edilir. Böylece yükselme ve yerleşme zamanı kriterleri sağlanmışolur.İkinci olarak sisteme PI kontrolörü eklenirse <strong>ile</strong>ri yol transfer fonksiyonu65.436 *10 KP2( s 500)( s K12/ KP2))G( s) GP ( s)GC( s)(5.7)2s ( s 400.26)( s 3008)şekline gelir. Tasarım yöntemine uygun göreli küçük bir K I2 /K P2 belirlemek için K I2 /K P2=15 seçelim. Bu durumda (5.7) nolu ilişki65.436 *10 KP2( s 500)( s 15)G( s)2s ( s 400.26)( s 3008)(5.8)şekline dönüşür. Tablo-5.1’dedeğerleri verilmiştir.çeşitli K P2 değerleri için zaman tanım bölgesi kriter ve21
Şekil-5.1. PID kontrolörüne ilişkin kök eğrisi22
Tablo-5.1. PID kontrolörüne ilişkinzaman tanım bölgesi kriterleriK P2 Aşım (%) t r (s) t s (s)1.0 11.1 0.00088 0.00250.9 10.8 0.00111 0.002020.8 9.3 0.00127 0.003030.7 8.2 0.00130 0.003030.6 6.9 0.00155 0.003030.5 5.6 0.00172 0.004040.4 5.1 0.00214 0.005050.3 4.8 0.00271 0.003030.2 4.5 0.00400 0.004040.1 5.6 0.00747 0.007470.08 6.5 0.00895 0.04545Görüldüğü gibi optimal değerler 0.2 ve 0.4 civarında yer alır. K P2 =0.3 seçilirseK P = K P2 + K D1 K 12 = 0.3+0.002*4.5=0.309K D = K D1 K P2 = 0.002*0.3=0.0006K I = K 12 = 4.5Olarak elde edilir. Şekil-5.2’ de, PID kontrolörlü sistemin birim basamak yanıtı PI ve PDkontrolörlü sistem yanıtları <strong>ile</strong> beraber verilmiştir.Şekil-5.2. PID kontrolörü sistem yanıtı23
Frekans Tanım Bölgesi TasarımıPD kontrolörünün başarab<strong>ile</strong>ceği K D =0.002 için en iyi aşım %11.37 olarak elde edilmiş idi.Bundan yararlanılarak <strong>ile</strong>ri yol transfer fonksiyonu92.718 *10 (1 0.002s)G(s) GP ( s)GC( s)(5.9)s(s 400.26)( s 3008)olarak elde edilir. Buna ilişkin bode diyagramı şekil-5.3’ de verilmiştir. Bu problemde, zamantanım bölgesi kriterlerine karşı düşen, aşağıdaki frekans tanım bölgesi kriterlerinin verilmişolduğunu varsayalım: Faz payı 70 0 , BG 1000 rad/s, M r 1.1.Bode diyagramında 70 0 lik faz payını gerçeklemek için yeni faz geçiş frekansının g =811rad/s olması gerektiği ve bu frekansta G(j) genliğinin 7 dB olduğu görülür. Buna göre K P2katsayısı|g G(j)/ 20dB7 / 20K P 210 10 0.45 (5.10)olarak hesaplanır. Zaman tanım bölgesi tasarımında geçerli K P2 aralığı K 12 / K P2 =15ilişkisinde 0.2 <strong>ile</strong> 0.4 arasında bulunmuştu. (5.10) nolu ilişkide elde ed<strong>ile</strong>n sonuç bu bölgeninaz dışına düşer. Tablo-5.2’de frekans tanım bölgesi kriterlerinden K D =0.002 için, K 12 / K P2azaldıkça faz payının sürekli azaldığını, ancak K P2 = 0.2’ nin altında aşımın ilginç olarakarttığını kaydedelim.Şekil-5.3. PID kontrolörü Bode diyaframı.24
Tablo-5.2. PID kontrolörüfrekans tanım bölgesi kriterleriK P2 K I2 KP (dB) FP(derece)M r BG(rad/s)t r (s) t s (s) Aşım(%)1.00 0 58.45 1.07 2607 0.0008 0.00255 11.370.45 6.75 68.5 1.03 1180 0.0019 0.0040 5.60.40 6.00 69.3 1.027 1061 0.0021 0.0050 5.00.30 4.50 71.45 1.024 1024 0.0027 0.00303 4.80.20 3.00 73.88 1.031 528.8 0.0040 0.00404 4.50.10 1.5 76.91 1.054 269.5 0.0076 0.0303 5.60.08 1.2 77.44 1.065 216.9 0.0092 0.00469 6.56. Dijital PID Kontrolörü TasarımıDijital kontrol sistemlerin tasarımı sürekli kontrol sistemlerin tasarımına eşdeğerdir. Buradakihedef de sistem kriterlerine uygun bir şekilde davranmaya yönelten, bir kontrolörtasarlamaktır. Gerçekte kontrol ed<strong>ile</strong>cek sistem aynıdır, tek fark dijital sistemlerdeörneklenmiş veriyi işleyeb<strong>ile</strong>cek yetenekte olmasıdır.Sürekli PID kontrolörünün transfer fonksiyonuGCKI( s) KP KDs (6.1)solarak ifade edilmişti. Ayrıca sayısal türev alıcının z-transformu, K D orantı katsayısı olmaküzere,GD( z 1)( z) KD(6.2)Tzşeklindedir. Bir fonksiyon alanını sayısal yaklaşık olarak elde etmenin temel üç yöntemivardır; yamuk integrasyon, <strong>ile</strong>ri dikdörtgen integrasyon ve geri dikdörtgen integrasyon. Bunagöre yamuk integrasyonda, K I orantı katsayısı olmak üzere, sayısal integratörün transferfonksiyonuKIT(z 1)GI ( z)(6.3)2( z 1)olarak elde edilir. İleri dikdörtgen integrasyonda ise K I katsayı olmak üzere, transferfonksiyonu,( ) K Tz IGI z(6.4)( z 1)olarak bulunur. Geri dikdörtgen integrasyonda ise K I katsayı olmak üzere, transferfonksiyonu,25
( ) K T IGI z(6.5)( z 1)olarak elde edilir.Yukarıdaki açıklanan oran, türev ve integral alma işlemleri birleştirilirse, bir sayısal PIDkontrolörünün aşağıdaki farklı transfer fonksiyonları <strong>ile</strong> modelleneb<strong>ile</strong>ceği görülür:Yamuk integrasyon2( KP TKI/ 2 KD/ T)z ( TKI/ 2 KP 2KD/ T)z KD/ TGC ( z)(6.6)z(z 1)İleri dikdörtgen integrasyon2( KP TKI KD/ T ) z ( KP 2KD/ T ) z KD/ TGC ( z)(6.7)z(z 1)Geri dikdörtgen integrasyon2( KP KD/ T ) z ( TKI KP 2KD/ T ) z KD/ TGC ( z)(6.8)z(z 1)Bilinear-Dönüşüm integrasyonu222(2KPT KIT 2KD) z ( KIT 2KPT 4KD) z 2KDGc ( z)(6.9)2Tz(z 1)olarak yazılabilirler.Dijital PD Kontrolör Tasarımı6.6-6.9 denklemlerinde K I =0 yazıldığında dijital PD kontrolörüGC( KPT KD) z KD( z)(6.10)Tztransfer fonksiyonu <strong>ile</strong> ifade edilir. G c (z)’ nin sistem kararlı hal hatasını etk<strong>ile</strong>memesi yadaG c (1)=1 koşulunu sağlanması için K p =1 olarak seçilir.ÖrnekÖrnekleme periyodu 0.01 saniye olarak ver<strong>ile</strong>n sistemin transfer fonksiyonu2500KG P( s)(6.11)s(s 25)olarak ver<strong>ile</strong>n sistemde Zero order hold <strong>ile</strong> beraber z-dönüşümü:1 2500K 0.1152z 0.106G ( ) (1 )2( 25)hoGPz z (6.12) s s ( z 1)(z 0.7788)26
olarak bulunur. Sistemin <strong>ile</strong>ri yol transfer fonksiyonu(1 100KG(z)D) z 100KzD0.1152z 0.106.( z 1)(z 0.7788)(6.13)K D etkisini incelemek için kök çevreleri yönteminden yararlanılabilir. Kapalı çevrimlisistemin karakteristik denklemiz( z2 1.663z 0.8848) 11.52KD( z 1)( z 0.9217) 0 (6.14)şeklindedir. Karakteristik denklemden faydalanılarak eşdeğer <strong>ile</strong>ri yol transfer fonksiyonu11.52KD( z 1)( z 0.9217)Geş ( z)(6.15)2z(z 1.6636z 0.8848)olarak bulunur. Şekil-6.1’de K D > 0 için sistemin kök çevreleri verilmiştir. Bu kökçevrelerinde görüldüğü gibi PD kontrolörünün sisteme etkisi eğri gerçek eksene fazlayaklaştığından çok sımırlıdır. Aşım yönünden en uygun K D değerinin %28 aşım <strong>ile</strong> 0.022olduğu göster<strong>ile</strong>bilir.Şekil-6.1 Dijital PD kontrolörüne ilişkin kök eğrisi27
Dijital PI Kontrolör TasarımıBuradaki tasarımda PID kontrolörünün, geri dikdöretgen entegrasyon yöntemi <strong>ile</strong>gerçekleştireceğiz. Buna göre K D =0 için dijital PI kontrolörünün transfer fonksiyonuKPz ( KP KIT)GC ( z)(6.16)z 1olarak elde edilir. PI kontrolörü daha önceden de ifade edildiği gibi kararlı-hal hatasınıdüzeltmek için kullanılır.ÖrnekKontrol ed<strong>ile</strong>cek sistemin transfer fonksiyonu10G P( s)(6.17)( s 1)( s 2)olarak verilmiş ve örnekleme periyodu T=0.1s olarak verilmiştir. Kompanze edilmemişsistemin açık çevrim transfer fonksiyonu0.0453( z 0.905)Gho GP( z)(6.18)( z 0.905)( z 0.819)olarak elde edilir. Ver<strong>ile</strong>n performans kriterleri: Rampa-hata sabiti K v 5, Maksimum aşım %5, Maksimum açım zamanı t max 1s.PI kontrolörlü açık çevrim transfer fonksiyonu0.0453[( KPz ( KP KIT)](z 0.905)G(z)( z 1)(z 0.905)( z 0.819)(6.19)olarak yazılır ve rampa-hata sabiti1Kv lim( z 1)G(z) 5.0187KIT z1 5 (6.20)olarak yazılarak K I =1 seç<strong>ile</strong>bilir. K I bulunduktan sonra K P nin etkisi kök yer eğrisi <strong>ile</strong>incelenebilir. K I =1 iken kompanze edilmiş sistemin karakteristik denklemini( 1)(z 0.905)( z 0.819) 0.00453( z 0.905) 0.00453K( z 1)( z 0.905) 0zPson denklemi K P içermeyen terime bölersek0.0453KP( z 1)( z 0.905) Geş 1 0 (6.21)3z 2.7236z 2.469z 0.73671228
G eş (z) denkleminde çarpıcı faktör sadece K P olduğuna göre kök eğrisi gerçekleştir<strong>ile</strong>bilir veşekil-6.2’de verilmiştir.Şekil-6.2. Dijital PI kontrolörüne ilişkin kök eğrisiAşağıdaki tabloda K I =1 için K P , Aşım ve t max değerleri verilmiştir. Bu sonuçlara göre PIkontrolörü kararlı hal hatasını elimine ederken aşım ve t max kriterleri üzerine fazla etkilideğildir.Dijital PID Kontrolör TasarımıÖrnekTablo-6.1. Dijital PI kontrolöre ilişkinbazı parametreleriK P Aşım T max (s)1.5 1.476 91.4 1.473 101.0 1.464 120.9 1.476 120.5 1.617 16Bu örneğimizde kontrol ed<strong>ile</strong>cek sistemin transfer fonksiyonu10G P( s)(6.22)( s 1)( s 2)29
olarak verilmiş ve örnekleme periyodu T=0.1s olarak verilmiştir. Kompanze edilmemişsistemin açık çevrim transfer fonksiyonu0.0453( z 0.905)Gho GP( z)(6.23)( z 0.905)( z 0.819)olarak elde edilir. Ver<strong>ile</strong>n performans kriterleri: Rampa-hata sabiti K v 5, Maksimum aşım %5, Maksimum açım zamanı t max 1s.Dijital PID kontrolöründe bilinmeyen K P , K I , K D parametrelerinin bulunması gerekmektedir.Rampa-hata sabitini bulmak için PI kontrolörü uygulanırsa0.0453[( KPz ( KP KIT)](z 0.905)G(z)( z 1)(z 0.905)( z 0.819)(6.24)olarak yazılır ve rampa-hata sabitiKv1 lim( z 1)G(z) 5.0187KT z1I 5yazılarak K I =1 seç<strong>ile</strong>bilir. G ho G P (z)’in z=0.905 ve z=0.819 daki kutupları G c (z)’e iki sıfıreklenerek yok ed<strong>ile</strong>bilir. Bu işlem222(2KPT KIT 2KD) z ( KIT 2KPT 4KD) z 2KDGc ( z)(6.25)2Tz(z 1)Bilinear transfer fonksiyonunu aşagıdaki gibi düzenleyerek kullanırsakz22KIT 2KPT22KT K TPI 4K 2KDDz 2KTP2K KD2IT 2KD ( z 0.905)( z 0.819)(6.26)yazılabilir. T=0.1s ve K I =1 ise K P ve K D değerleri son denklemden 1.454 ve 0.431 olarakbulunur. Bu değerler denklm-6.25’de yazılırsa( z 0.905)( z 0.819)G c( z) 5.811(6.27)z(z 1)olarak yazılır ve PID kontrolörlü sistemin açık çevrim transfer fonksiyonu0.263( z 0.905)G(z) Gc ( z)GhoGp( z)(6.28)z(z 1)30
olarak yazılır. Şekil-6.3’de birim basamak cevabı verilmiş olup maksimum aşım=%3.8 vet max =0.6 saniye olarak elde edilir.Şekil-6.3. Dijital kontrolör sistem yanıtı.7. PID Kontrolör Sistemlerinde Ziegler-Nichols Kuralları <strong>ile</strong> AyarlamaTransfer fonksiyonu1Gc( s) KP(1 Tds)(7.1)Tİsolan bir PID kontrolör sisteminde, Zeigler ve Nichols oransal kazanç K P , integral zamanı T i ,ve diferansiyel zamanı T d değerlerinin hesaplamasında basit kurallar sunmuşlardır. Bukurallarda maksimum aşım %25 olarak hedeflenmektedir.Birinci MetotBirinci metotta deneysel olarak sisteme birim basamak uygulanır şekil-7.1’de gösterildiği gibibir yanıt alınır. Şayet sistem integratör yada baskın kompleks eşlenik kutup içeriyorsa bukural uygulanamaz.Birim basamak yanıtı şekil-7.2’dekine benzeterek T ve L değerleri ölçülür ve K P , T i ve T dparametreleri aşağıdaki tabloya göre hesaplanır.31
Tablo-7.1.Parametre seçim tablosu.Kontrolör K P T i T dtipiP T/L 0PI 0.9T/L L/0.3 0PID 1.2T/L 2L 0.5Lİkinci Metotİkinci metotta ilk olarak T i = ve T d =0 ‘ set ed<strong>ile</strong>rek sadece oransal kontrol yapılır. Şekil-7.3Şekil-7.3. PID kontrolör blok diyagramı.32
Bu kuralda K P değeri 0 dan kritik değer olan K cr değerine kadar arttırılır ve bu değerde sistemçıkışı sürekli salınıma girer. Böylelikle K cr ve buna karşı düşen P cr periyodu not edilir şekil-7.4.Şekil-7.4. Kritik salınımın bulunması.Bu işlem gerçekleştikten sonra K P , T i ve T d parametreleri aşağıdaki tabloya göre hesaplanır.ÖrnekTablo-7.2.Parametre seçim tablosu.Kontrolör K P T i T dtipiP 0.5K cr 0PI 0.45K cr 0.83P cr 0PID 0.6K cr 0.5P cr 0.125P crTransfer fonksiyonu1G P( s)(7.2)s(s 1)( s 5)olan bir sisteme PID kontrolörü uygulandığında K P , T i ve T d parametrelerini bulunuz.Sistem integratör içerdiğine göre Zeigler ve Nichols’un ikinci metedu kullanılacaktır.T i = ve T d =0 değerlerini ayarlayarak kapalı çevrim sisteminin transfer fonksiyonuKPG( s)s(s 1)( s 5) KP(7.3)olarak yazılır. Sistemin salınımı, Routh kararlılık kriteri kullanılarak bulunabilir. Kapalıçevrim sisteminin karakteristik denklemis 3 6s2 5s KP 0(7.4)olarak yazılır. Buradan Routh dizisis 3 1 5s 2 6 K Ps 1s 030-K P6K P33
olarak elde edilir. Burada K P =30 değerinde sistem salınıma geçer kritik kazanç K cr =30 olur.K P =30’da karakteristik denklems 3 6s2 5s 30 0(7.5)olarak yazılır. Salınım frekansını bulmak için s=j yazılırsa karakteristik denklem32( j ) 6( j) 5( j) 30 0 (7.6)veya226(5 ) j (5 ) 0 (7.7)yazılır ve salınım frekansı =5 olur ve salınım periyodu ise22Pcr 2.81(7.8) 5olarak bulunur ve tablo-7.2’ ye göre diğer parametrelerK p = 0.6K cr =18T i = 0.5P cr = 1.405T d = 0.125P cr =0.35124Olarak bulunur. Sistemin birim basamak yanıtı şekil-7.5’te verilmiş olup sistemin aşımı %62olup bu parametrelerin tekrardan bilgisayarda veya kök eğri yöntemi kullanılarak hassasolarak düzeltilmesi gerekmektedir.Şekil-7.5. PID kontrolöre ilişkin Sistem yanıtı.PID kontrolörün transfer fonksiyonunu aşağıdaki formda tekrar yazarsakKiGc( s) KP KDs (7.9)sKp = oransal kazançKI = Integral kazançKd = diferansiyel kazanç34
Olarak yazılır ve özetlersek, (Kp) yükselme zamanını ve kararlı hal hatasını azaltır fakattamamen ortadan kaldırmaz. İntegral kontrol (Ki) kararlı hal hatasını yok eder fakat geçicidurum yanıtını kötüleştirir. Diferansiyel kontrol (Kd) sistemin kararlılığını arttırır aşımıazaltır. Kapalı çevrimli bir sistemin Kp, Kd, ve Ki katsayılarının etk<strong>ile</strong>ri aşağıdakitabloya göre özetlenebilir.Tablo-7.3. PID kontrolördeparametrelerin etk<strong>ile</strong>riCL RESPONSE RISE TIME OVERSHOOT SETTLING TIME S-S ERRORKp Decrease Increase Small Change DecreaseKi Decrease Increase Increase EliminateKd Small Change Decrease Decrease Small ChangeKp, Ki ve Kd kazanç sabitleri K P , T i ve T d sabitleri cinsinden ifade ed<strong>ile</strong>bilirKp = K PKi = 1/T iKd = T dBağıntıları yazılarak Kp=39.42, Ti=3.077, Td=0.7692 değerlerinde sistemin aşımı veyerleşme zamanı düzeltilmiş olur.Şekil-7.6. PID kontrolöre ilişkin düzeltilmiş sistem yanıtı8. Matematik Modeli Bilinmeyen Sistemlerde PID Kontrolör TasarımıZiegler-Nichols, PID kontrolünde Kp, Ti, ve Td parametrelerinin belirlenmesi için ikimetoddan oluşan ve deneysel basmaklarla gerçekleştir<strong>ile</strong>n yöntemler sunmaktadır. Buyöntemler sistemin matematik modeli bilinmiyorsa PID parametrelerinin belirlenmesinde iyibir yöntem olmaktadır. İşletme mühendisi sistem üzerinde deneyler yaparak en uygun PIDparametrelerinin belirlenmesinden sonra bir daha gerekmedikçe bu değerler değiştirilmez.Şekil-7’de özetlenen algoritma Zeigler-Nichols yönteminin ikinci basamağından yola çıkarakgeliştirilmiş olup en pratik ve en çok kullanılanıdır.35
Şekil-7 PID parametrelerinin ayarlanması algoritmasıBu yöntemde ilk olarak şekil-8 de gösterildiği gibi Ti’yi sonsuza Td’yi sıfıra getirereksadece oransal kontrol gerçekleştirilir.Daha sonra set değerini küçük bir değere ayarlayıp sistemin salınımı işletmeye zararvermeyecek şekle getirilir. Sistem bu değere geldiğinde set değeri tekrar orjinal değerinegetirilir ve sistemin salınımı gözlenir. Şayet sistem salınımı daralarak set değerineyaklaşıyorsa Kp azaltılır, tam tersi durumda ise Kp’ yi çoğaltarak sabit salınımı elde edenekadar Kp <strong>ile</strong> oynanır. Sabit salınım elde edildiği anda bu Kp kritik değeri Kcr olarak notedilir, aynı anda salınımın iki tepe arasındaki kritik zamanı Tc olarak not edilir. Bu değerleralındıktan sonra kullanılacak kontrol sistemine göre Kp, Ti ve Td tabloya göre hesaplanır. Buhesaplamalar sisteminizi optimum performansla çalışmasını sağlayacaktır. Bu şekildeayarlanan sistemlerin kararlı duruma oturması şekil-9’da gösterildiği gibi gerçekleşir veoturma zamanı (Ts) değişik şartlara göre 1-5 saat arasında değişmektedir[2].36













