İpe Tırmanan Robot Tırtıl
İpe Tırmanan Robot Tırtıl
İpe Tırmanan Robot Tırtıl
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
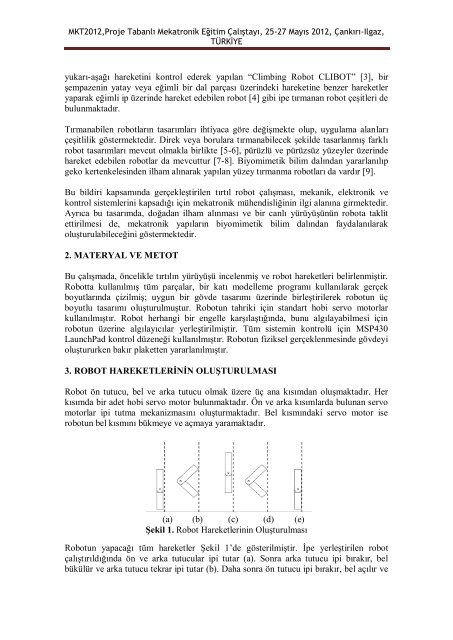
MKT2012,Proje Tabanlı Mekatronik Eğitim Çalıştayı, 25-27 Mayıs 2012, Çankırı-Ilgaz,TÜRKİYEyukarı-aşağı hareketini kontrol ederek yapılan “Climbing <strong>Robot</strong> CLIBOT” [3], birşempazenin yatay veya eğimli bir dal parçası üzerindeki hareketine benzer hareketleryaparak eğimli ip üzerinde hareket edebilen robot [4] gibi ipe tırmanan robot çeşitleri debulunmaktadır.Tırmanabilen robotların tasarımları ihtiyaca göre değişmekte olup, uygulama alanlarıçeşitlilik göstermektedir. Direk veya borulara tırmanabilecek şekilde tasarlanmış farklırobot tasarımları mevcut olmakla birlikte [5-6], pürüzlü ve pürüzsüz yüzeyler üzerindehareket edebilen robotlar da mevcuttur [7-8]. Biyomimetik bilim dalından yararlanılıpgeko kertenkelesinden ilham alınarak yapılan yüzey tırmanma robotları da vardır [9].Bu bildiri kapsamında gerçekleştirilen tırtıl robot çalışması, mekanik, elektronik vekontrol sistemlerini kapsadığı için mekatronik mühendisliğinin ilgi alanına girmektedir.Ayrıca bu tasarımda, doğadan ilham alınması ve bir canlı yürüyüşünün robota taklitettirilmesi de, mekatronik yapıların biyomimetik bilim dalından faydalanılarakoluşturulabileceğini göstermektedir.2. MATERYAL VE METOTBu çalışmada, öncelikle tırtılın yürüyüşü incelenmiş ve robot hareketleri belirlenmiştir.<strong>Robot</strong>ta kullanılmış tüm parçalar, bir katı modelleme programı kullanılarak gerçekboyutlarında çizilmiş; uygun bir gövde tasarımı üzerinde birleştirilerek robotun üçboyutlu tasarımı oluşturulmuştur. <strong>Robot</strong>un tahriki için standart hobi servo motorlarkullanılmıştır. <strong>Robot</strong> herhangi bir engelle karşılaştığında, bunu algılayabilmesi içinrobotun üzerine algılayıcılar yerleştirilmiştir. Tüm sistemin kontrolü için MSP430LaunchPad kontrol düzeneği kullanılmıştır. <strong>Robot</strong>un fiziksel gerçeklenmesinde gövdeyioluştururken bakır plaketten yararlanılmıştır.3. ROBOT HAREKETLERİNİN OLUŞTURULMASI<strong>Robot</strong> ön tutucu, bel ve arka tutucu olmak üzere üç ana kısımdan oluşmaktadır. Herkısımda bir adet hobi servo motor bulunmaktadır. Ön ve arka kısımlarda bulunan servomotorlar ipi tutma mekanizmasını oluşturmaktadır. Bel kısmındaki servo motor iserobotun bel kısmını bükmeye ve açmaya yaramaktadır.(a) (b) (c) (d) (e)Şekil 1. <strong>Robot</strong> Hareketlerinin Oluşturulması<strong>Robot</strong>un yapacağı tüm hareketler Şekil 1’de gösterilmiştir. İpe yerleştirilen robotçalıştırıldığında ön ve arka tutucular ipi tutar (a). Sonra arka tutucu ipi bırakır, belbükülür ve arka tutucu tekrar ipi tutar (b). Daha sonra ön tutucu ipi bırakır, bel açılır ve