

vektor-esasi-asenkron-motor-kontrolu - 320Volt
vektor-esasi-asenkron-motor-kontrolu - 320Volt
vektor-esasi-asenkron-motor-kontrolu - 320Volt

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
MATERYAL VE METOT<br />
CEYHUN YILDIZ<br />
y m<br />
e m<br />
u A<br />
u r<br />
u<br />
y<br />
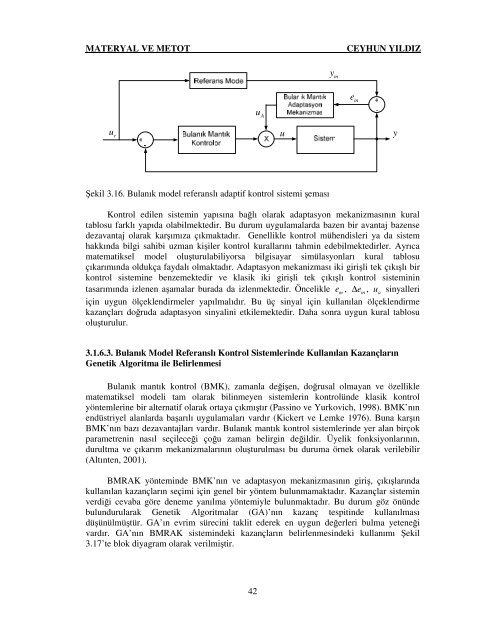
Şekil 3.16. Bulanık model referanslı adaptif kontrol sistemi şeması<br />
Kontrol edilen sistemin yapısına bağlı olarak adaptasyon mekanizmasının kural<br />
tablosu farklı yapıda olabilmektedir. Bu durum uygulamalarda bazen bir avantaj bazense<br />
dezavantaj olarak karşımıza çıkmaktadır. Genellikle kontrol mühendisleri ya da sistem<br />
hakkında bilgi sahibi uzman kişiler kontrol kurallarını tahmin edebilmektedirler. Ayrıca<br />
matematiksel model oluşturulabiliyorsa bilgisayar simülasyonları kural tablosu<br />
çıkarımında oldukça faydalı olmaktadır. Adaptasyon mekanizması iki girişli tek çıkışlı bir<br />
kontrol sistemine benzemektedir ve klasik iki girişli tek çıkışlı kontrol sisteminin<br />
tasarımında izlenen aşamalar burada da izlenmektedir. Öncelikle e , m<br />
∆ em<br />
, u<br />
a<br />
sinyalleri<br />
için uygun ölçeklendirmeler yapılmalıdır. Bu üç sinyal için kullanılan ölçeklendirme<br />
kazançları doğruda adaptasyon sinyalini etkilemektedir. Daha sonra uygun kural tablosu<br />
oluşturulur.<br />
3.1.6.3. Bulanık Model Referanslı Kontrol Sistemlerinde Kullanılan Kazançların<br />
Genetik Algoritma ile Belirlenmesi<br />
Bulanık mantık kontrol (BMK), zamanla değişen, doğrusal olmayan ve özellikle<br />
matematiksel modeli tam olarak bilinmeyen sistemlerin kontrolünde klasik kontrol<br />
yöntemlerine bir alternatif olarak ortaya çıkmıştır (Passino ve Yurkovich, 1998). BMK’nın<br />
endüstriyel alanlarda başarılı uygulamaları vardır (Kickert ve Lemke 1976). Buna karşın<br />
BMK’nın bazı dezavantajları vardır. Bulanık mantık kontrol sistemlerinde yer alan birçok<br />
parametrenin nasıl seçileceği çoğu zaman belirgin değildir. Üyelik fonksiyonlarının,<br />
durultma ve çıkarım mekanizmalarının oluşturulması bu duruma örnek olarak verilebilir<br />
(Altınten, 2001).<br />
BMRAK yönteminde BMK’nın ve adaptasyon mekanizmasının giriş, çıkışlarında<br />
kullanılan kazançların seçimi için genel bir yöntem bulunmamaktadır. Kazançlar sistemin<br />
verdiği cevaba göre deneme yanılma yöntemiyle bulunmaktadır. Bu durum göz önünde<br />
bulundurularak Genetik Algoritmalar (GA)’nın kazanç tespitinde kullanılması<br />
düşünülmüştür. GA’ın evrim sürecini taklit ederek en uygun değerleri bulma yeteneği<br />
vardır. GA’nın BMRAK sistemindeki kazançların belirlenmesindeki kullanımı Şekil<br />
3.17’te blok diyagram olarak verilmiştir.<br />
42














