Kompendium - Datorteknik
Kompendium - Datorteknik
Kompendium - Datorteknik
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
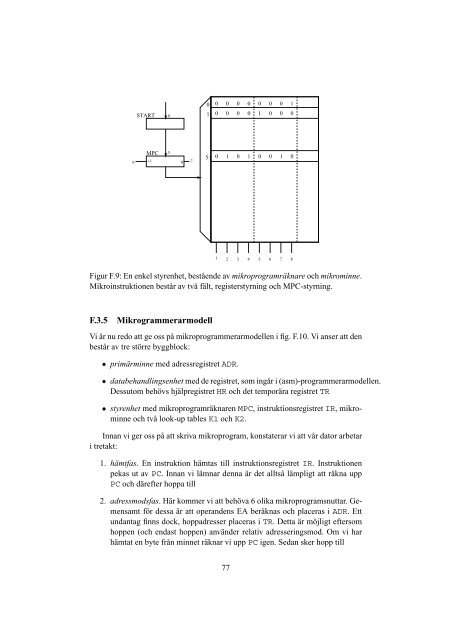
START80: 0 0 0 0 0 0 0 11: 0 0 0 0 1 0 0 0MPC 56 +10 75:0 1 0 1 0 0 1 01 2 3 4 5 678Figur F.9: En enkel styrenhet, bestående av mikroprogramräknare och mikrominne.Mikroinstruktionen består av två fält, registerstyrning och MPC-styrning.F.3.5MikrogrammerarmodellVi är nu redo att ge oss på mikroprogrammerarmodellen i fig. F.10. Vi anser att denbestår av tre större byggblock:• primärminne med adressregistret ADR.• databehandlingsenhet med de registret, som ingår i (asm)-programmerarmodellen.Dessutom behövs hjälpregistret HR och det temporära registret TR• styrenhet med mikroprogramräknaren MPC, instruktionsregistret IR, mikrominneoch två look-up tables K1 och K2.Innan vi ger oss på att skriva mikroprogram, konstaterar vi att vår dator arbetari tretakt:1. hämtfas. En instruktion hämtas till instruktionsregistret IR. Instruktionenpekas ut av PC. Innan vi lämnar denna är det alltså lämpligt att räkna uppPC och därefter hoppa till2. adressmodsfas. Här kommer vi att behöva 6 olika mikroprogramsnuttar. Gemensamtför dessa är att operandens EA beräknas och placeras i ADR. Ettundantag finns dock, hoppadresser placeras i TR. Detta är möjligt eftersomhoppen (och endast hoppen) använder relativ adresseringsmod. Om vi harhämtat en byte från minnet räknar vi upp PC igen. Sedan sker hopp till77