

скачать - Акустический институт им. академика Н.Н. Андреева
скачать - Акустический институт им. академика Н.Н. Андреева
скачать - Акустический институт им. академика Н.Н. Андреева

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
УДК 534.44<br />
Badiey M., Кацнельсон Б.Г., Малыхин А.Ю.<br />
ВАРИАЦИИ ГОРИЗО<strong>Н</strong>ТАЛЬ<strong>Н</strong>ОЙ И<strong>Н</strong>ТЕРФЕРЕ<strong>Н</strong>ЦИО<strong>Н</strong><strong>Н</strong>ОЙ СТРУКТУРЫ ПОЛЯ В<br />
ПРИСУТСТВИЕ ДВИЖУЩИХСЯ <strong>Н</strong>ЕЛИ<strong>Н</strong>ЕЙ<strong>Н</strong>ЫХ В<strong>Н</strong>УТРЕ<strong>Н</strong><strong>Н</strong>ИХ ВОЛ<strong>Н</strong><br />
University of Delaware,<br />
Newark, DE, USA<br />
badiey@udel.edu<br />
Воронежский университет,<br />
Россия, 394006 Воронеж, Университетская пл.1<br />
Тел (04732208748) Факс (04732208755)<br />
katz@phys.vsu.ru<br />
Рассматриваются флуктуации поля в горизонтальной плоскости при пересечении акустической трассы<br />
пакетов нелинейных внутренних волн. Результаты теории сравниваются с экспер<strong>им</strong>ентальными данными<br />
В данной работе рассматривается вариация структуры низкочастотного поля в акустической трассе в<br />
присутствие пакета нелинейных внутренних волн (<strong>Н</strong>ВВ) пересекающих трассу. Изменчивость среды<br />
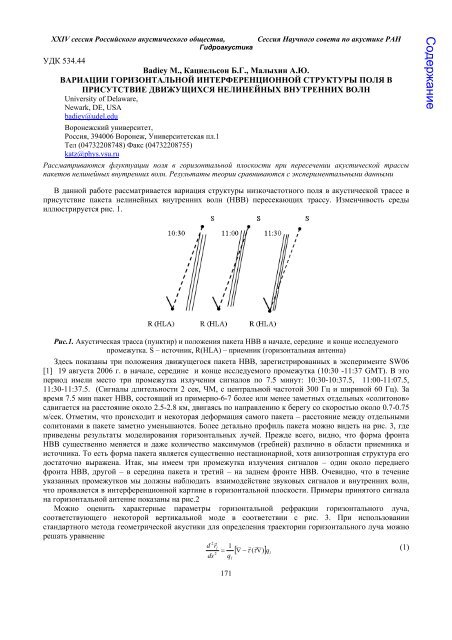
иллюстрируется рис. 1.<br />
Рис.1. Акустическая трасса (пунктир) и положения пакета <strong>Н</strong>ВВ в начале, середине и конце исследуемого<br />
промежутка. S – источник, R(HLA) – приемник (горизонтальная антенна)<br />
Здесь показаны три положения движущегося пакета <strong>Н</strong>ВВ, зарегистрированных в экспер<strong>им</strong>енте SW06<br />
[1] 19 августа 2006 г. в начале, середине и конце исследуемого промежутка (10:30 -11:37 GMT). В это<br />
период <strong>им</strong>ели место три промежутка излучения сигналов по 7.5 минут: 10:30-10:37.5, 11:00-11:07.5,<br />
11:30-11:37.5. (Сигналы длительности 2 сек, ЧМ, с центральной частотой 300 Гц и шириной 60 Гц). За<br />
время 7.5 мин пакет <strong>Н</strong>ВВ, состоящий из пр<strong>им</strong>ерно-6-7 более или менее заметных отдельных «солитонов»<br />
сдвигается на расстояние около 2.5-2.8 км, двигаясь по направлению к берегу со скоростью около 0.7-0.75<br />
м/сек. Отмет<strong>им</strong>, что происходит и некоторая деформация самого пакета – расстояние между отдельными<br />
солитонами в пакете заметно уменьшаются. Более детально профиль пакета можно видеть на рис. 3, где<br />
приведены результаты моделирования горизонтальных лучей. Прежде всего, видно, что форма фронта<br />
<strong>Н</strong>ВВ существенно меняется и даже количество макс<strong>им</strong>умов (гребней) различно в области приемника и<br />
источника. То есть форма пакета является существенно нестационарной, хотя анизотропная структура его<br />
достаточно выражена. Итак, мы <strong>им</strong>еем три промежутка излучения сигналов – один около переднего<br />
фронта <strong>Н</strong>ВВ, другой – в середина пакета и третий – на заднем фронте <strong>Н</strong>ВВ. Очевидно, что в течение<br />
указанных промежутков мы должны наблюдать вза<strong>им</strong>одействие звуковых сигналов и внутренних волн,<br />
что проявляется в интерференционной картине в горизонтальной плоскости. Пр<strong>им</strong>еры принятого сигнала<br />
на горизонтальной антенне показаны на рис.2<br />
Можно оценить характерные параметры горизонтальной рефракции горизонтального луча,<br />
соответствующего некоторой вертикальной моде в соответствии с рис. 3. При использовании<br />
стандартного метода геометрической акустики для определения траектории горизонтального луча можно<br />
решать уравнение<br />
2 r<br />
d<br />
l 1<br />
= [ ∇ −<br />
r τ (<br />
r τ∇)<br />
] q<br />
(1)<br />
2<br />
l<br />
ds q<br />
l<br />
171
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
r r радиус вектор ГЛ,<br />
где l<br />
касательной к лучу.<br />
q l - собственное значение моды с номером l, s r - длина дуги луча, τ - вектор<br />
Рис.2. Пр<strong>им</strong>еры интерференционных картин на горизонтальной антенне. Время указано над рисунками.<br />
172
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Рис.3 Схема поведения горизонтального луча в присутствии <strong>Н</strong>ВВ. Пунктиром показаны фронты <strong>Н</strong>ВВ, S-<br />
положение источника в начале координат, ось SX’ направлена вдоль акустической трассы, χ - угол<br />
горизонтальной рефракции, α - угол акустической трассы с фронтом <strong>Н</strong>ВВ.<br />
Решая соответствующие уравнения можно получить для флуктуаций горизонтального угла оценку<br />
0<br />
µ<br />
∆ χ ~ l<br />
(2)<br />
α<br />
0<br />
где µ l амплитуда добавки к показателю преломления для горизонтальных лучей, обусловленная <strong>Н</strong>ВВ.<br />
Эта величина зависит от номера моды и частоты. В частности для нашего случая наибольшее значение эта<br />
0<br />
3 −2<br />
величина <strong>им</strong>еет для 4 моды: µ ~ 5 10<br />
−<br />
l ⋅ −10<br />
. Угол α ~ 0. 1 или 5 о . Флуктуации углов в<br />
горизонтальной плоскости проявляются в появлении интерференционной картины на горизонтальной<br />
антенне, что экспер<strong>им</strong>ентально наблюдается (рис. 2). Характерное расстояние между<br />
интерференционными макс<strong>им</strong>умами (мин<strong>им</strong>умами) может быть определено с использованием, напр<strong>им</strong>ер,<br />
пространственного Фурье- преобразования. Соответствующая обработка дает Λ = 135 м , что при<br />
параметрах: λ = 5 м (для частоты 300 Гц), β = 25 . 8°<br />
дает χ = 5 ° , что более неплохо соответствует<br />
оценке (2).<br />
Картина горизонтальных лучей для одного из моментов времени и построенной по экспер<strong>им</strong>ентальным<br />
данным модели волновода, показана на рис.4<br />
Рис.4. Картина горизонтальных лучей, соответствующих моде 4, для момента времени 11:05. Звездочка<br />
показывает пр<strong>им</strong>ерное положение горизонтальной антенны.<br />
Видно, что на горизонтальной антенне <strong>им</strong>еет место приход лучей с разными углами в горизонтальной<br />
плоскости. Расчет в рамках данной численной модели дает те же значения горизонтальных углов, <strong>им</strong>енно<br />
χ ~ 5° .<br />
Л И Т Е Р А Т У Р А<br />
1. Newhall A, Duda T.et al (2007) Acoustic and oceanographic observations and configuration information for the WHOI<br />
moorings form the sw06 experiment. Technical report. WHOI-2007-04<br />
173
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
УДК 551.463.21 : 534<br />
В.А. Буров, А.В. Прудникова, С.<strong>Н</strong>. Сергеев, А.С. Шуруп<br />
ВОССТА<strong>Н</strong>ОВЛЕ<strong>Н</strong>ИЕ ОКЕА<strong>Н</strong>ИЧЕСКИХ ПОТОКОВ МЕТОДАМИ<br />
АКУСТИЧЕСКОЙ ТОМОГРАФИИ<br />
Московский государственный университет <strong>им</strong>ени М.В. Ломоносова, физический факультет<br />
Россия, 119991, ГСП-1, Москва, Ленинские горы<br />
Тел.: (495) 939-3081; Факс: (495) 932-8820; E-mail: burov@phys.msu.ru.<br />
В работе обсуждается возможность восстановления течений в океане методами акустической томографии с точки<br />
зрения необход<strong>им</strong>ых для этого измерений полевых данных, математических процедур и алгоритмов. Показано, что для<br />
восстановления потоков в океане не требуется дополнительных измерений на пер<strong>им</strong>етре региона, что предполагалось<br />
рядом авторов, а восстановление можно провести в едином подходе для всех типов потоков – как планарных течений, так<br />
и вихрей. Представлены результаты компьютерного моделирования.<br />
Акустическая томография позволяет восстановить внутреннюю структуру обширных (порядка<br />
сотен и тысяч километров) регионов океана на основе характеристик акустических сигналов, прошедших<br />
через рассматриваемую область. Основными объектами мониторинга океана являются его рефракционные<br />
неоднородности ∆ c (отклонения глубинного профиля скорости звука от, напр<strong>им</strong>ер, среднесезонных<br />
значений) и кинетические неоднородности v – глобальные течения типа Гольфстр<strong>им</strong>а и локальные<br />
синоптические вихри, аналогичные атмосферным вихрям. Последние представляют особенный интерес,<br />
поскольку, в соответствии с современными представлениями, <strong>им</strong>енно в них сосредоточено до 90%<br />
кинетической энергии океана.<br />
Полная трехмерная задача томографии океана во многих случаях может быть сведена тем или<br />
иным путём к набору двумерных задач, в которых наборы двумерных функций позволяют восстановить<br />
параметры исследуемых трёхмерных неоднородностей. Важным упрощением при решении<br />
томографической задачи является тот факт, что океанические течения можно считать горизонтальными<br />
[1], так как в большинстве случаев вертикальная составляющая скорости у них во много раз меньше<br />
горизонтальной, и ею можно пренебречь. В дальнейшем для простоты рассматривается двумерная задача<br />
в горизонтальной плоскости.<br />
Вопрос о восстановлении кинетических неоднородностей v (r)<br />
(вихрей, течений), r – радиусвектор<br />
в горизонтальной плоскости, является частным вопросом о восстановлении векторных полей. Один<br />
из разработанных ранее подходов [2] томографического восстановления векторных неоднородностей v (r)<br />
основан на представлении их в виде суммы градиента скалярного Φ (r)<br />
и ротора векторного Ψ (r)<br />
irrot sol<br />
потенциалов: v ( r)<br />
= v ( r)<br />
+ v ( r)<br />
, где v<br />
irrot ( r)<br />
= grad Φ(<br />
r)<br />
, v sol ( r)<br />
= rot Ψ(<br />
r)<br />
, div Ψ ( r)<br />
= 0 . После чего<br />
вопросы, связанные с восстановлением полного поля v (r)<br />
, рассматриваются отдельно для каждой<br />
компоненты v irrot ( r)<br />
, v sol ( r)<br />
. Показано [2], что соленоидальная составляющая v sol ( r)<br />
может быть<br />
однозначно восстановлена в лучевой томографической схеме из данных рассеяния, в то время как<br />
восстановление безвихревой компоненты v irrot ( r)<br />
возможно при рассмотрении течения несж<strong>им</strong>аемой<br />
жидкости в случае известных значениях скорости течения на границе исследуемой области. Так<strong>им</strong><br />
образом [2], векторное поле v (r)<br />
может быть полностью восстановлено при использовании<br />
проекционных данных рассеяния, граничных значений v (r)<br />
и при выполнении условия несж<strong>им</strong>аемости<br />
жидкости. Использование полученных результатов для построения томографической схемы, приводит к<br />
определенным трудностям, так как становятся необход<strong>им</strong>ыми дополнительные измерения скорости<br />
течений на границе рассматриваемой акватории. Кроме этого, если предположить, что соленоидальное<br />
поле в большинстве своем представляет вихревое движение океанической среды, а потенциальное –<br />
глобальные течения (Гольфстр<strong>им</strong>, Куросио), то, следовательно, представляется необход<strong>им</strong>ым<br />
разрабатывать разные «измерительные» схемы для этих видов потоков.<br />
<strong>Н</strong>есколько иной подход к решению задачи восстановления v (r)<br />
предложен в [3]. В случае течения<br />
несж<strong>им</strong>аемой жидкости div v ( r)<br />
= 0 , rot v ( r)<br />
= Ω(<br />
r)<br />
, Ω (r)<br />
– вектор вихря, соотношение между<br />
пространственным спектром восстанавливаемого поля скоростей<br />
~ v ( k ) и спектральными амплитудами<br />
~<br />
вектора вихря Ω ( k ) <strong>им</strong>еет вид: ~ ~<br />
2<br />
v ( k)<br />
= i[ k × Ω(<br />
k)<br />
] k , i – мн<strong>им</strong>ая единица, k = k – волновое число.<br />
~<br />
Показано [3], что Фурье-образ данных рассеяния позволяет оценить пространственный спектр Ω ( k ) и,<br />
следовательно, оценить v (r)<br />
через обратное Фурье-преобразование его спектральных компонент<br />
~ v ( k ) ,<br />
174
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
~<br />
определяемых на основании Ω ( k ) . Предложенный подход несколько упрощает рассмотрение задачи, по<br />
сравнению с [2], так как предполагает непосредственное восстановление скорости v (r)<br />
, а не ее<br />
скалярного Φ (r)<br />
и векторного Ψ (r)<br />
потенциалов. Однако использование Фурье-преобразований<br />
накладывает определенные требования на количество данных рассеяния, используемых для выполнения<br />
этих преобразований с заданной точностью, – требуется большое количество источников и приемников<br />
акустических сигналов, что существенно увеличивает сто<strong>им</strong>ость и усложняет техническую сторону<br />
реализации томографического экспер<strong>им</strong>ента в океане.<br />
В настоящей работе предлагается алгоритм восстановления векторных неоднородностей v (r)<br />
в<br />
приближении несж<strong>им</strong>аемой жидкости, основанный на их простом и экономном представлении, не<br />
требующем дополнительных измерений параметров течений на границе исследуемой области.<br />
Предлагаемая схема основана на том, что любое течение v (r)<br />
несж<strong>им</strong>аемой жидкости в ограниченной<br />
области, не содержащей источников, может быть представлено как полностью соленоидальное.<br />
Следовательно, в этом случае течение может быть восстановлено только на основе данных рассеяния без<br />
дополнительных измерений параметров v (r)<br />
на границе рассматриваемой области. Алгоритмическая<br />
реализация предлагаемой схемы основана на пр<strong>им</strong>енении полосчатого базиса для описания<br />
восстанавливаемых потоков.<br />
При решении томографической задачи далее рассматривается акватория круглой формы,<br />
окруженная по пер<strong>им</strong>етру приемно-передающ<strong>им</strong>и устройствами. Возмущение времени распространения<br />
сигнала вдоль луча, соединяющего i-ую пару «источник-приемник», которое вызвано наличием<br />
неоднородности скорости течения ∆ v ( r)<br />
= v(<br />
r) - v0(<br />
r)<br />
и возмущением скорости звука ∆ с ( r)<br />
= с(<br />
r) - с0(<br />
r)<br />
0<br />
0 0<br />
∆c(<br />
r)<br />
dl v(<br />
r)<br />
τ<br />
относительно их фоновых значений v<br />
0(<br />
r)<br />
≡ 0 и с<br />
0(<br />
r)<br />
, <strong>им</strong>еет вид [4]:<br />
i<br />
( r)<br />
dl<br />
∆t<br />
≈ −∫<br />
−<br />
0 2 ∫<br />
,<br />
i<br />
L<br />
0 2<br />
i c0<br />
( r)<br />
L<br />
i c0<br />
( r)<br />
где τ 0<br />
0<br />
i<br />
( r) – единичный вектор, касательный к траектории L<br />
i<br />
в невозмущенной среде; предполагаются<br />
справедливыми условия v ( r ) c
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
функции (а, следовательно, и их линейные комбинации) удовлетворяют условию непрерывности для<br />
несж<strong>им</strong>аемой жидкости div v ( r)<br />
= 0 , что, как показано выше, является принципиальным при<br />
восстановлении векторных неоднородностей на основе только данных рассеяния. Использование<br />
базисных функций, заданных внутри локализованных областей, напр<strong>им</strong>ер, внутри квадратов, плотно<br />
покрывающих исследуемую область, требует наложения дополнительных требований на получаемые<br />
оценки v ˆ(<br />
r)<br />
[5].<br />
5<br />
При компьютерном моделировании рассматривалась акватория радиусом R<br />
a<br />
= 10 м, окруженная<br />
19 расположенными по пер<strong>им</strong>етру приемно-передающ<strong>им</strong>и устройствами. Фоновое значение скорости<br />
звука полагалось постоянным с 0 = 1500 м/с. Правая часть в (2) была образована временными задержками<br />
∆ t i<br />
(но не их полуразностями), вызванными присутствием в акватории восстанавливаемой<br />
неоднородности. Восстанавливаемое течение представляло собой вихрь Озеена (рис. 1) с профилем<br />
2<br />
2 2<br />
аз<strong>им</strong>утальной скорости v(<br />
r ) = Ω0 0<br />
[ 1−<br />
exp( − r − r′<br />
0<br />
R0<br />
) ] r − r′<br />
0<br />
R и параметрами Ω 0.00003 рад/с,<br />
R 0. 3R a<br />
r ′<br />
0<br />
= x0, ′ y′<br />
0<br />
= 0.4R a<br />
, 0. 4R a<br />
(рис. 1а, 1г). Использовался полосчатый базис, состоящий из 8<br />
полос, поворачиваемых с равным угловым шагом π / 15 в интервале [ 0 , π)<br />
. Амплитуда базисного течения<br />
полагалась равной 1 м/с. <strong>Н</strong>а рис. 1б, 1д изображены результаты восстановления течения по предлагаемой<br />
схеме. Видно, что удалось оценить структуру и расположение исследуемой неоднородности, а также<br />
направление вектора скорости вихря с приемлемой точностью.<br />
При реализации экспер<strong>им</strong>ента в океане приходится сталкиваться с тем, что под действием<br />
подводных течений (которые всегда присутствуют в условиях реального экспер<strong>им</strong>ента), приемнопередающие<br />
устройства могут сместиться от их первоначальных положений в неизвестном направлении<br />
на неизвестное расстояние. Возникающие в этом случае ошибки определения времен распространения<br />
сигналов требуют своего учета при восстановлении рефракционных неоднородностей [6]. При<br />
0<br />
= , { } { }<br />
восстановлении течений, как это будет видно из дальнейшего, ситуация упрощается.<br />
В случае неизвестного смещения источника на радиус-вектор δ r и приемника на<br />
влияние неизвестного смещения антенн оказывается скомпенсированным.<br />
<strong>Н</strong>а рис. 1в, 1е приведены результаты томографического восстановления при тех же параметрах задачи,<br />
что и на рис. 1б, 1д, но в случае, когда приемо-передающие устройства смещены в горизонтальной<br />
плоскости в случайных направлениях на расстояния ~ 50 м. <strong>Н</strong>еявный учет эффектов, связанных с<br />
вычислением полуразности времен распространения сигналов во вза<strong>им</strong>но противоположных<br />
направлениях, происходит при вычислении матрицы A + A в М<strong>Н</strong>К-решении системы (2), что объясняет<br />
хорошие результаты восстановления на рис. 1в, 1е. <strong>Н</strong>а основании полученных оценок можно сделать<br />
вывод о том, что восстановление течений v (r)<br />
оказывается слабо чувствительным к неизвестному<br />
смещению приемо-передающих устройств в горизонтальной плоскости.<br />
В работе предложена схема восстановления течений в океане, основанная на их простом и<br />
экономном представлении в полосчатом базисе. Условие несж<strong>им</strong>аемости жидкости дает возможность<br />
176<br />
i<br />
0<br />
=<br />
δ rj<br />
, при<br />
δr i<br />
Rij<br />
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
осуществить реконструкцию полного поля скорости ее течения при использовании только данных<br />
рассеяния. Это сильно упрощает задачу построения томографической схемы и математическую сторону<br />
задачи, поскольку, во-первых, не требует дополнительных измерений скорости на пер<strong>им</strong>етре акватории<br />
(что ранее представлялось необход<strong>им</strong>ым), и, во-вторых, позволяет описать все кинетические<br />
неоднородности (вихри и глобальные течения) в едином представлении. Показано, что восстановление<br />
1<br />
v (r)<br />
, м/с<br />
1<br />
v ˆ(<br />
r)<br />
, м/с v ˆ(<br />
r)<br />
, м/с<br />
1<br />
0.5<br />
0.5<br />
0.5<br />
0<br />
0<br />
1<br />
0<br />
1<br />
1<br />
1<br />
0<br />
1<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
x, × 10 5 м -1 -1 y, × 10 5 м x, × 10 5 м -1 -1 y, × 10 5 м x, × 10 5 м -1 -1 y, × 10 5 м<br />
Рис. 1а<br />
Рис. 1б<br />
Рис. 1в<br />
y, × 10 5 м y, × 10 5 м y, × 10 5 м<br />
1<br />
1<br />
1<br />
v (r)<br />
v ˆ(<br />
r)<br />
v ˆ(<br />
r)<br />
0<br />
0<br />
0<br />
-1<br />
-1 0 1<br />
Рис. 1г x, × 10 5 м<br />
-1<br />
-1 0 1<br />
Рис. 1д x, × 10 5 м<br />
течений в океане слабо чувствительно к неизвестному смещению приемо-передающих устройств в<br />
горизонтальной плоскости, что существенно снижает требования на точность их позиционирования при<br />
проведении томографических экспер<strong>им</strong>ентов.<br />
Работа выполнена при поддержке грантов Президента РФ № <strong>Н</strong>Ш 4590.2010.2, № МК-2041.2011.5<br />
и грантов РФФИ № 10-05-00229, № 10-02-00636.<br />
Л И Т Е Р А Т У Р А<br />
1. Осташев В.Е. Распространение звука в движущихся средах. М.: <strong>Н</strong>аука, 1992. 208 с.<br />
2. Norton S.J. Unique tomographic reconstruction of vector fields using boundary data // IEEE Transactions on image processing. – 1992. – V.1. –<br />
№2. – P. 406-412.<br />
3. Рычагов М.<strong>Н</strong>. Лучевая и дифракционная акустическая томография вихревых потоков // Доклады X сессии Российского акустического<br />
общества. – М.: ГЕОС, 2000. – С. 145-148.<br />
4. Munk W., Worcester P., Wunsch C. Ocean Acoustic Tomography. Cambridge University Press, 1995. 433 р.<br />
5. Буров В.А., Сергеев С.<strong>Н</strong>., Шуруп А.С. Роль выбора базисных функций в задачах акустической томографии океана // Акустич. журнал. –<br />
2007. – T.53. – № 6. – С. 791-808.<br />
6. Буров В.А., Сергеев С.<strong>Н</strong>., Шуруп А.С. Использование информации об углах прихода сигнала в акустической томографии океана //<br />
Доклады XII школы-семинара <strong>им</strong>. Акад. Л.М. Бреховских, совмещенной с XXI сессией Российского Акустического Общества. – М.:<br />
ГЕОС, 2009. – С. 224-227.<br />
УДК 551.463.21 : 534<br />
В.А. Буров, А.В. Прудникова, С.<strong>Н</strong>. Сергеев, А.С. Шуруп<br />
АКУСТИЧЕСКАЯ ТОМОГРАФИЯ ИМПЕДА<strong>Н</strong>СА И РЕЛЬЕФА Д<strong>Н</strong>А В МЕЛКОМ МОРЕ<br />
Московский государственный университет <strong>им</strong>ени М.В. Ломоносова, физический факультет<br />
Россия, 119991, ГСП-1, Москва, Ленинские горы<br />
Тел.: (495) 939-3081; Факс: (495) 932-8820; E-mail: burov@phys.msu.ru.<br />
В работе рассматривается восстановление параметров дна мелкого моря: его <strong>им</strong>педансных параметров и рельефа.<br />
177<br />
-1<br />
-1 0 1<br />
Рис. 1е x, × 10 5 м<br />
Рис.1. Модельное распределение по акватории модуля (а) и вектора (г) скорости течения v (r)<br />
.<br />
Результаты восстановления этого распределения в лучепролетной схеме: (б, д) – восстановление в<br />
случае несмещенных антенн; (в, е) – восстановление при неизвестном смещении антенн.
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Показано, что при использовании в качестве источника зондирования модовых сигналов можно разделить влияние этих<br />
параметров на распространяющееся поле благодаря различному характеру их влияния на дисперсионные характеристики<br />
мод, что может быть использовано в томографических схемах. Само восстановление производится в представлении<br />
«горизонтальные лучи – вертикальные моды» в полосчатом базисе. Приведены результаты численного моделирования<br />
предлагаемой схемы.<br />
Распространение звука в мелком море существенным образом зависит от параметров дна, что<br />
необход<strong>им</strong>о учитывать при проведении гидроакустических исследований. Часто используют<br />
непосредственные измерения характеристик морского дна, напр<strong>им</strong>ер, с помощью судна, буксирующего<br />
цепочку гидрофонов [Ошибка! Источник ссылки не найден.]. Подобного рода измерения позволяют<br />
оценить локальные параметры дна. Получение данных о характеристиках дна во всей акватории с<br />
размерами ~ 100 км (что является актуальным, напр<strong>им</strong>ер, для целей томографии мелкого моря) при<br />
использовании локальных методов измерений требует существенных временных и материальных затрат.<br />
В связи с эт<strong>им</strong> представляет интерес разработка томографических методов оценки параметров дна<br />
мелкого моря. Ранее [1. Осташев В.Е. Распространение звука в движущихся средах. М.: <strong>Н</strong>аука, 1992. 208 с.<br />
] была показана возможность восстановления рельефа жесткого дна методами акустической<br />
томографии. В настоящей работе рассматривается вопросы совместного восстановления <strong>им</strong>педанса и<br />
рельефа дна без специальных мер по разделению эффектов их влияния на наблюдаемые данные.<br />
Предполагается, что исследуемая акватория цилиндрической формы окружена по пер<strong>им</strong>етру<br />
вертикальными антеннами, излучающ<strong>им</strong>и и прин<strong>им</strong>ающ<strong>им</strong>и акустическое поле (рис. 1). Рассматривается<br />
жидкий слой (изоскоростной волновод со скоростью звука c<br />
0<br />
= 1500 м/с, плотностью ρ<br />
0<br />
= 1000 кг/м 3 ,<br />
глубиной H<br />
0<br />
= 300 м), лежащий на полупространстве с параметрами c = 1650 м/с, ρ = 1800 кг/м 3 . Для<br />
простоты рассмотрения, поглощение не учитывается. В исследуемой акватории есть неоднородности<br />
скорости звука в дне ∆ c(r)<br />
и возмущения рельефа дна ∆ H (r)<br />
, r – радиус-вектор в горизонтальной<br />
плоскости. Предполагается, что обработка сигналов, прин<strong>им</strong>аемых гидрофонами антенн, согласованная с<br />
(m)<br />
профилями мод в местах их расположения, позволила определить времена распространения t′<br />
ij<br />
мод m -<br />
ых номеров между всеми i -ми и j -ми антеннами, окружающ<strong>им</strong>и исследуемую акваторию. Ставится<br />
задача оценки неоднородностей ∆ c(r)<br />
и ∆ H (r)<br />
томографическ<strong>им</strong>и методами на основе возмущения<br />
( m)<br />
( m)<br />
( m)<br />
(m)<br />
времен распространения модовых <strong>им</strong>пульсов ∆ tij<br />
= t′<br />
ij<br />
− tij<br />
, через акваторию ( t<br />
ij<br />
– время<br />
распространения мод в отсутствии неоднородностей ∆ c(r)<br />
и ∆ H (r)<br />
). Задача рассматривается в<br />
адиабатическом приближении. Используется представление акустического поля в виде «вертикальные<br />
моды – горизонтальные лучи», что позволяет свести трехмерную<br />
задачу распространения звука в океане к набору независ<strong>им</strong>ых<br />
двумерных задач распространения мод вдоль горизонтальных<br />
лучей. Учет неадиабатичности возможен, но усложняет<br />
рассмотрение. Для рассматриваемых далее параметров<br />
неоднородностей степень неадиабатичности не превышает 5%.<br />
Для описания океанических неоднородностей при<br />
решении томографической задачи использовался полосчатый<br />
базис [5]. Для построения базисных функций акватория<br />
разбивается на параллельные полосы, равномерно покрывающие<br />
исследуемую акваторию и поворачиваемых под различными<br />
углами. Вдоль каждой из рассматриваемых полос поочередно<br />
Рис. 1. Рассматриваемая акватория<br />
с восстанавливаемыми<br />
вводится базисное возмущение рельефа θ′<br />
n<br />
(r)<br />
в виде ступенчатого<br />
неоднородностями ∆ H (r)<br />
, ∆ c(r)<br />
.<br />
возвышения, либо в виде аналогичного возмущения скорости<br />
звука θ′ ′ (r)<br />
. Предполагается, что искомые неоднородности могут быть разложены с необход<strong>им</strong>ой<br />
k<br />
точностью по данному полосчатому базису: ∆H ( r ) = ∑ θ′ ( r)<br />
, ∆c ( r ) = ∑ θ′ ′ ( r)<br />
. Перебор всех полос,<br />
содержащих возмущение рельефа θ′<br />
n<br />
(r)<br />
, для всех пар антенн позволяет построить матрицу A′ ,<br />
(m)<br />
содержащую возмущения времен ∆ t ij<br />
, вызванных поочередным введением в акваторию<br />
неоднородностей θ′<br />
n<br />
(r)<br />
. Матрица A′ описывает влияние неоднородностей рельефа на возмущения<br />
178<br />
n<br />
x n<br />
n<br />
∆ c(r)<br />
∆H (r)<br />
k<br />
x k<br />
k
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
приемных данных. Аналогичным образом стоится матрица A′ ′ , состоящая из временных задержек мод,<br />
вызванных поочередным рассмотрением базисных неоднородностей скорости звука θ′ ′<br />
k<br />
(r)<br />
. Матрица A′ ′<br />
позволяет описать влияние восстанавливаемых неоднородностей ∆ c(r)<br />
. Предполагая, что<br />
неоднородности ∆ c(r)<br />
и ∆ H (r)<br />
вносят в принятое поле возмущения, аддитивно связанные с<br />
возмущениями, внос<strong>им</strong>ыми базисными функциями θ′<br />
n<br />
(r)<br />
и θ′ ′<br />
k<br />
(r)<br />
, эти неоднородности могут быть<br />
восстановлены путем решения системы линейных уравнений, которая в матричном виде записывается<br />
следующ<strong>им</strong> образом:<br />
AX = ∆Т, (1)<br />
где A – матрица возмущений, составленная из двух блоков A′ и A′ ′ ; X – вектор-столбец коэффициентов<br />
разложения исследуемых неоднородностей по базисным функциям. Регуляризованное решение М<strong>Н</strong>К-типа<br />
находится по формуле: Xˆ = (A Т A + γ 2 Е) -1 A Т ∆Т, где Е – единичная матрица, γ 2 – коэффициент<br />
регуляризации. <strong>Н</strong>айденные коэффициенты разложения, позволяют оценить восстанавливаемые функции:<br />
∆H ˆ ( r ) = ∑ ˆ θ′ ( r)<br />
, ∆c ˆ(<br />
r ) = ∑ ˆ θ′ ′ ( r)<br />
. <strong>Н</strong>а заключительном этапе визуализации результатов<br />
k<br />
x m<br />
m<br />
k<br />
x k<br />
k<br />
восстановления осуществлялась фильтрация, заключавшаяся в подавлении высокочастотной части<br />
пространственного спектра восстановленного изображения. Точность полученных результатов<br />
2<br />
2<br />
оценивалась с помощью невязок по решению η ∆ c<br />
= ∑ ∆c ( r<br />
d<br />
) − ∆cˆ(<br />
rd<br />
) ∑ ∆c<br />
( rd<br />
) ,<br />
η ∆ H<br />
=<br />
∑<br />
d<br />
∑<br />
∆H − ∆Hˆ<br />
2<br />
( r ) ( r ) ∆H<br />
( r ) (для неоднородностей скорости звука и рельефа,<br />
соответственно) и невязки<br />
d<br />
d<br />
2<br />
d<br />
η<br />
T<br />
по правой части<br />
d<br />
η<br />
T<br />
=<br />
2<br />
∑ ∆T<br />
′− ∆ ′ ∑ ∆ ′<br />
l<br />
Tl<br />
Tl<br />
l<br />
d<br />
2<br />
ˆ<br />
+<br />
, где T = A A X<br />
l<br />
d<br />
∆ ˆ′ ˆ ,<br />
+<br />
+<br />
∆T′ = A A X = A ∆T<br />
. Здесь ∆ c( r d<br />
) , ∆ H ( r d<br />
) – истинные дискретизованные значения<br />
неоднородности; ∆ cˆ ( rd<br />
) , ∆ Hˆ<br />
( r d<br />
) – восстановленные значения. Численные оценки невязок приведены в<br />
подписях к соответствующ<strong>им</strong> рисункам.<br />
Важно, что в предлагаемом подходе осуществляется совместное восстановление неоднородностей<br />
∆ c(r) и ∆ H (r)<br />
без разделения эффектов их влияния на данные рассеяния, что упрощает математическую<br />
и алгоритмическую сторону решаемой задачи. Возможность такого восстановления была<br />
продемонстрирована ранее в [5] на основе анализа дисперсионных характеристик мод. Было показано, что<br />
рассмотрение нескольких мод на нескольких частотах позволяет разделить эффекты влияния<br />
неоднородностей ∆ c(r)<br />
и ∆ H (r)<br />
при их совместном восстановлении.<br />
При решении прямой задачи – определении возмущения времен распространения звука между<br />
ψ r z [2. Norton S.J. Unique tomographic reconstruction of vector fields<br />
антеннами – рассматривались моды сравнения ( )<br />
m<br />
;<br />
using boundary data // IEEE Transactions on image processing. – 1992. – V.1. – №2. – P. 406-412.<br />
], являющиеся решением задачи Штурма:<br />
⎧ 2<br />
d ψm( r;<br />
z)<br />
2<br />
2<br />
⎪ + [ k ( r;<br />
z) − ξ ( )] ψ ( ; ) = 0,<br />
2<br />
m<br />
r<br />
m<br />
r z<br />
⎪ dz<br />
⎨ψ<br />
m( r;<br />
z)<br />
z=<br />
0<br />
= 0,<br />
⎪<br />
⎪⎡<br />
dψ<br />
m<br />
( ) ( )<br />
( r;<br />
z)<br />
⎤<br />
=<br />
⎪⎢ψm<br />
r;<br />
z + g r,<br />
ξm<br />
⎥ 0,<br />
⎩⎣<br />
dz ⎦ z=<br />
H ( r)<br />
где z – глубина, k 2πf<br />
c0<br />
= , f – частота сигнала, g( r , ξ )<br />
m<br />
=<br />
2<br />
m<br />
ρ<br />
1<br />
ξ ( r)<br />
− k<br />
2<br />
. Здесь<br />
2<br />
плотностей дна и жидкости в волноводе. Поиск собственных значений ξ ( r)<br />
m<br />
ρ<br />
ρ<br />
1<br />
= - отношение<br />
ρ<br />
0<br />
, фактически, сводится к<br />
поиску нулей функции одной переменной, полученной из второго граничного условия для<br />
фиксированного значения r (далее завис<strong>им</strong>ость от r для простоты опускается), которая в<br />
рассматриваемой простейшей модели изоскоростного жидкого слоя, лежащего на однородном<br />
179
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
2<br />
непоглощающем полупространстве, <strong>им</strong>еет вид: 2 2 ⎛ x<br />
2 2<br />
⎞<br />
f ( x)<br />
= sin x − ρ xcos<br />
x k − k − 0, где x = k − ξm<br />
H ,<br />
1 1 ⎜ ⎟ =<br />
k<br />
1<br />
- волновое число в дне. Поиск нуля функции f (x)<br />
осуществлялся с задаваемой точностью при<br />
простом переборе значений переменной х из диапазонов ее изменений, определяемых отдельно для мод<br />
разных номеров. Оцененные так<strong>им</strong> образом значения х позволяли рассчитать горизонтальные волновые<br />
(m)<br />
числа ξ m , которые использовались для определения возмущений времен ∆ t ij<br />
. Так, при построении<br />
правой части ∆Т системы (1) решалось двумерное уравнение эйконала для горизонтальных лучей,<br />
соответствующих отдельным модам, что дало возможность вычислить интегралы фазовой скорости вдоль<br />
( m)<br />
ξm( r)<br />
dl ( m)<br />
волновода ∆tij<br />
= ∫ − tij<br />
. Интегрирование проводилось вдоль траекторий L<br />
ik<br />
горизонтальных<br />
L<br />
ik 2πf<br />
лучей, соединяющих все i -ые и j -ые антенны, в неоднородной среде. При построении матрицы<br />
возмущений А в (1) использовался простой геометрический метод, существенно облегчающий решение<br />
прямой задачи. Предполагалось, что горизонтальные лучи являются прямыми линиями, а преломление их<br />
происходит только на границах базисных полос по закону Снеллиуса. В итоге правая часть и матрица<br />
возмущений в (1) рассчитывались разными способами.<br />
При численном моделировании рассматривалась акватория радиусом 100 км, окруженная 19<br />
∆ c , м/c<br />
20<br />
0<br />
-20<br />
1 0 -1<br />
0 -1<br />
y, × 10 5 м<br />
x, × 10 5 м<br />
Рис. 2а<br />
∆ ĉ , м/c<br />
20<br />
0<br />
-20<br />
1 0<br />
y, × 10 5 -1<br />
0 -1<br />
м<br />
x, × 10 5 м<br />
Рис. 2в<br />
Рис. 2. Модельное распределение параметров неоднодностей скорости звука ∆ c(r)<br />
(а) и рельефа ∆ H (r)<br />
(б) в<br />
дне; результаты их совместного восстановления ∆ cˆ ( r)<br />
(в) и ∆ H ˆ ( r ) (г) получены с невязками по решению<br />
∆ H<br />
10<br />
η ∆c<br />
= 0.30, η ∆H<br />
= 0.28 и правой части η T<br />
= 10 -4 .<br />
0<br />
⎝ H ⎠<br />
-10<br />
1 0 -1<br />
0-1<br />
y, × 10 5 м<br />
x, × 10 5 м<br />
Рис. 2б<br />
∆ Ĥ<br />
10<br />
0<br />
, м<br />
, м<br />
-10<br />
1 0 -1<br />
0-1<br />
y, × 10 5 м<br />
x, × 10 5 м<br />
Рис. 2г<br />
расположенными по пер<strong>им</strong>етру вертикальными антеннами. Использовался полосчатый базис, состоящий<br />
из 8 полос поворачиваемых с равным угловым шагом π / 15 в интервале [ 0 , π)<br />
. Единичное возмущение в<br />
базисной полоске представляет собой ступенчатое изменение с шириной, равной ширине полоски<br />
σ = 25 км, ось изменения проходит посередине полосы. Амплитуда возмущения рельефа в базисной<br />
полосе составляла ∆H d<br />
= 5 м; амплитуда возмущения скорости звука – ∆ cd<br />
= 10 м/с. Регуляризующий<br />
2<br />
5<br />
коэффициент γ брался равным 10 − от макс<strong>им</strong>ального собственного значения матрицы A + A .<br />
180
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Возмущение рельефа представляло собой возвышение и впадину гауссовой формы<br />
2 2<br />
2 2<br />
[ − r − r′′<br />
1<br />
σ ] + H<br />
2<br />
[ − r − r′′<br />
2<br />
]<br />
∆H ( r)<br />
= H1 exp<br />
exp σ , <strong>им</strong>еющие соответственно высоту H<br />
1<br />
= 15 м и<br />
глубину H<br />
2<br />
= −10<br />
м, с характерной шириной σ = 0.23Ra<br />
, расположенные с<strong>им</strong>метрично относительно<br />
центра акватории r ′′<br />
1<br />
= { 0.3R a<br />
, 0. 3R a<br />
}, r ′′<br />
2<br />
= { − 0.3R a<br />
, 0. 3R a<br />
}. Возмущение скорости звука в дне <strong>им</strong>ело вид:<br />
2 2<br />
2 2<br />
[ − r − r′′<br />
1<br />
σ ] + Λ2<br />
[ − r − r′′<br />
2<br />
]<br />
∆c ( r)<br />
= Λ1 exp<br />
exp σ , где амплитуды возмущения равны Λ<br />
1<br />
= 30 м/с,<br />
Λ<br />
2<br />
= −30 м/с. Следует обратить вн<strong>им</strong>ание, что расположения и характерные размеры неоднородностей<br />
∆ H (r) и ∆ c(r)<br />
совпадают, что макс<strong>им</strong>ально затрудняет совместное восстановление этих возмущений.<br />
Моделировалась ситуация, как если бы во впадине скапливались неконсолидированные осадки, а с<br />
возвышения они, напротив, смывались подводными течениями. <strong>Н</strong>а рис. 2 представлены результаты<br />
восстановления ∆ H (r)<br />
и ∆ c(r)<br />
при рассмотрении четырех низших мод на частотах 25 Гц, 50 Гц и 75 Гц.<br />
Из графиков видно, положение неоднородностей, их амплитудные значения и геометрические размеры<br />
удалось оценить с приемлемой точностью.<br />
В работе предложена схема модовой томографии <strong>им</strong>педанса и рельефа дна мелкого моря.<br />
Осуществлено совместное восстановление указанных характеристик дна. Использование ранее<br />
полученных результатов [Ошибка! Источник ссылки не найден.] восстановления возмущений<br />
гидрологии (неоднородность скорости звука в волноводе, течение), позволяет предложить схему<br />
томографирования неоднородностей океана в едином подходе, который обеспечивается разложением всех<br />
параметров (рефракционных неоднородностей, планарных течений, вихрей и геоакустических параметров<br />
дна) по полосчатому базису. Важным шагом дальнейших исследований является учет неадиабатического<br />
распространения звука и влияния внутренних волн.<br />
Работа выполнена при поддержке грантов Президента РФ № <strong>Н</strong>Ш 4590.2010.2, № МК-2041.2011.5<br />
и грантов РФФИ № 10-05-00229, № 10-02-00636.<br />
Л И Т Е Р А Т У Р А<br />
1. В.И. Романова, Л.Р. Мерклин, А.И. Хилько, А.И. Малеханов, В.А. Лазарев, А.А. Стромков. Экспер<strong>им</strong>ентальное<br />
исследование эффективности сейсмоакустического зондирования морского дна в завис<strong>им</strong>ости от спектральных и<br />
статистических характеристик шумов и помех // Труды XXII сессии Российского Акустического Общества. – М.: ГЕОС,<br />
2010. – С. 301-305.<br />
2. Буров В.А., Прудникова А.В., Сергеев С.<strong>Н</strong>., Шуруп А.С. Восстановление параметров дна мелкого моря методами<br />
акустической томографии // Доклады XIII школы-семинара <strong>им</strong>. Акад. Л.М. Бреховских, совмещенной с XXIII сессией<br />
Российского Акустического Общества. – М.: ГЕОС, 2011. (в печати)<br />
3. Буров В.А., Сергеев С.<strong>Н</strong>., Шуруп А.С. Роль выбора базисных функций в задачах акустической томографии океана //<br />
Акустич. журнал. – 2007. – T.53. – № 6. – С. 791-808.<br />
4. Б.Г. Кацнельсон, В.Г. Петников. Акустика мелкого моря. М.: <strong>Н</strong>аука, 1997. C 191.<br />
5. Буров В.А., Грачева Т.В., Сергеев С.<strong>Н</strong>., Шуруп А.С. Двумерная модель томографического восстановления океанических<br />
неоднородностей при волновом и лучевом описании акустического поля // Акустич. журнал. – 2008. – T.54. – №2. – C.<br />
291–306.<br />
УДК 551.463<br />
Р.А.Вадов<br />
ПОДВОД<strong>Н</strong>ЫЙ ЗВУКОВОЙ КА<strong>Н</strong>АЛ И КЛАССИЧЕСКИЕ ЧЕТВЕРКИ СИГ<strong>Н</strong>АЛОВ<br />
Г<strong>Н</strong>Ц РФ ФГУП «<strong>Акустический</strong> <strong>институт</strong> <strong>им</strong>. акад. <strong>Н</strong>.<strong>Н</strong>.<strong>Андреева</strong>»<br />
Россия, 117036 Москва, ул. Шверника , д. 4<br />
Тел.: 89168689601; Факс: (495) 126-8411; E-mail: vadov@akin.ru<br />
При анализе временной структуры звукового поля, формируемого в подводном звуковом канале (ПЗК), пом<strong>им</strong>о отдельных<br />
однолучевых сигналов нельзя не обратить вн<strong>им</strong>ание на классические четверки сигналов, являющиеся весьма устойчивым<br />
структурным образованием. Четверки обязаны сво<strong>им</strong> формированием ас<strong>им</strong>метрии подводного звукового канала. В<br />
четверках чисто водных однолучевых сигналов средние сигналы отличаются от первого и четвертого сигналов на одно<br />
касание каустики - от первого на одно больше, от четвертого на одно меньше. Четверка, так<strong>им</strong> образом, несет<br />
информацию о направлении изменения полярности сигналов (от положительной к отрицательной или наоборот). Введение<br />
усеченной «t-R»-характеристики, несущей информацию о местоположении четверок во временной структуре звукового<br />
поля, позволило выявить региональные различия в условиях дальнего распространения звука в ПЗК. Монотонными<br />
изменениями временных интервалов между центрами соседних четверок определяется ярко выраженная дисперсия<br />
оконечной части взрывных сигналов, распространяющихся в Черноморском ПЗК. Обсуждаются материалы<br />
экспер<strong>им</strong>ентов, проведенных в различных глубоководных регионах Мирового океана.<br />
181
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
В качестве исходного экспер<strong>им</strong>ентального материала для<br />
анализа временной структуры звукового поля, нами<br />
использовались взрывные сигналы, зарегистрированные при<br />
проведении опытов по дальнему распространению звука в<br />
подводном звуковом канале (ПЗК). Многолучевой взрывной<br />
сигнал при распространении в глубоком море распадается<br />
на три группы элементарных (однолучевых) сигналов.<br />
Первая - наиболее мощная основная группа визуально<br />
практически не разделяющихся во времени элементарных<br />
сигналов, распространяющихся вблизи от оси ПЗК. Вторая -<br />
группа элементарных сигналов, чисто водных, а также<br />
испытавших отражение от поверхности, которые приходят к<br />
приемнику с некоторым опережением относительно<br />
основной группы. Третья - группа элементарных сигналов,<br />
испытавших отражение от дна и поверхности, приходящих в<br />
точку приема с некоторым запаздыванием относительно<br />
основной.<br />
В данной работе огранич<strong>им</strong>ся анализом структуры<br />
чисто водных (не касающихся дна и поверхности океана) сигналов первой и второй групп.<br />
Временная структура зондирующего взрывного сигнала. Взрывной сигнал, принятый в полосе<br />
частот от 10-20 Гц до 1-2 кГц с дистанции 10-20 км и более, в условиях однолучевого распространения,<br />
представляет собой во временной области два кратковременных (длительностью < 1мс) <strong>им</strong>пульса, равных<br />
по величине, одного и того же знака - ударная волна и <strong>им</strong>пульс первой пульсация газового пузыря. Период<br />
пульсации определяется весом заряда и глубиной его подрыва [1].<br />
Структура классической четверки чисто водных сигналов. Классическая четверка зондирующих<br />
сигналов (не касающихся дна, поверхности), принятых на некотором расстоянии от источника,<br />
представляет собой четыре однолучевых сигнала, траектории которых различаются направлениями (вверх<br />
– к поверхности или вниз – ко дну) их выхода из источника и прихода к приемнику. Первый сигнал<br />
четверки <strong>им</strong>еет траекторию: вниз от источника и снизу к приемнику. Второй и третий сигналы четверки в<br />
завис<strong>им</strong>ости от глубин расположения источника и приемника <strong>им</strong>еют траектории: вверх от источника и<br />
снизу к приемнику или вниз от источника и сверху к приемнику. Четвертый сигнал четверки <strong>им</strong>еет<br />
траекторию: вверх от источника и сверху к приемнику. Сигналы в четверках различаются между собой<br />
количеством верхних полуциклов – полуциклов, расположенных в верхних, приповерхностных водных<br />
слоях. Количество нижних полуциклов для всех сигналов четверки неизменно. Между собой четверки<br />
различаются количеством полных циклов (N), описываемых траекториями средних сигналов<br />
относительно оси ПЗК.<br />
Пом<strong>им</strong>о различия времен распространения сигналов четверки от источника к приемнику эти<br />
сигналы различаются числом касания каустик (n). В четверках средние сигналы отличаются от первого и<br />
четвертого сигналов на одно касание каустики - от первого на<br />
одно больше, от четвертого на одно меньше. Четвертый сигнал<br />
четверки <strong>им</strong>еет столько же касаний каустики, как и первый сигнал<br />
последующей четверки. Разная кратность касания сигналом<br />
каустики приводит к различным фазовым, не зависящ<strong>им</strong> от<br />
частоты, сдвигам (на n⋅π/2). Первый сигнал четверки по фазе<br />
отличается от четвертого на π.<br />
Усеченная «τ-R»-диаграмма, региональные различия ПЗК.<br />
Для описания временной структуры <strong>им</strong>пульсного сигнала,<br />
распространяющегося в ПЗК авторами работы [2] была<br />
предложена «τ-R» -диаграмма, представляющая завис<strong>им</strong>ость<br />
времени распространения от расстояния между источником и<br />
приемником для всех однолучевых сигналов (τ- соответствующее<br />
дистанции R опережение во времени распространения сигнала по<br />
Рис.1. Классическая четверка сигналов.<br />
Цифры между <strong>им</strong>пульсами – номера сигналов.<br />
Слева от номера сигнала – ударная волна, справа<br />
– <strong>им</strong>пульс пульсации газового пузыря.<br />
Рис.2. «τ-R» – диаграммы, рассчитанные и<br />
построенные для Черного (1), Японского<br />
(2) и Филиппинского морей.<br />
отдельным лучам относительно сигнала, распространяющегося вдоль оси канала). Диаграмма состояла из<br />
бесконечного количества кривых, явно группирующихся в четверки. Такая “τ-R” - диаграмма при<br />
182
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
макс<strong>им</strong>альной ее информативности весьма громоздка и неудобна для проведения сопоставления<br />
структуры звуковых полей, формируемых в различных регионах Мирового океана.<br />
Для оценки региональной изменчивости временной структуры нами была предложена более<br />
компактная, усеченная “τ-R” – диаграмма, состоящая из одной кривой, характеризующей соотношение<br />
τ(R) для лучей, описывающих один полный цикл [3]. Такая кривая не дает представления о временных<br />
соотношениях между сигналами в классических четверках. Тем не менее, при соответствующем выборе<br />
масштаба осей (τ/N, R/N) она характеризует любой луч, описывающий в пространстве N целых циклов, и<br />
определяет местоположение любой четверки во временной структуре многолучевого сигнала. Расчеты<br />
усеченной “τ-R” – диаграммы, выполненные для нескольких регионов Мирового океана, показали их<br />
чувствительность к различиям в условиях распространения звука в ПЗК (см. рис.2). Временные<br />
соотношения между сигналами в четверках, как правило, плохо<br />
согласуются с результатами расчета, что, по-вид<strong>им</strong>ому, связано с<br />
заметной пространственно-временной изменчивостью состояния<br />
приповерхностного слоя морской среды, определяющего эти<br />
соотношения, а, следовательно, и с его неопределенностью во<br />
время проведения опыта. Временные соотношения между<br />
отдельными четверками сигналов на основе проведенного<br />
анализа были признаны более стабильными во времени.<br />
Чувствительность усеченной “τ-R”-диаграммы к<br />
региональным особенностям формирования временной<br />
структуры поля в ПЗК хорошо иллюстрируется так же и<br />
экспер<strong>им</strong>ентальными материалами, полученными для различных<br />
регионов Мирового океана. Временная структура для<br />
большинства регионов напоминает классическую,<br />
рассмотренную в работе [2]. Усеченные “τ-R”-диаграммы<br />
состоят из<br />
пологой части, где отношение δτ/δR мало и не превышает 0.001<br />
с/км, и более крутой второй части, где отношение δτ/δR достигает<br />
значений 0.005-0.015 с/км. При таком виде усеченной “τ-R”-<br />
диаграммы многолучевой сигнал, принятый в ПЗК на достаточном<br />
удалении от источника, во временной области разбивается на две<br />
части. Основная по протяженности часть сигнала состоит из<br />
раздельно приходящих четверок элементарных сигналов (в случае<br />
размещения источника и приемника на одном горизонте два<br />
средних сигнала в четверке приходят к приемнику одновременно).<br />
Эта часть многолучевого сигнала соответствует второй группе<br />
элементарных сигналов. Основная по энергетике, более короткая по<br />
протяженности часть (соответствует первой группе сигналов)<br />
представляет собой компактную группу приходящих почти<br />
одновременно и не разделяющихся визуально между собой<br />
четверок, которой и завершается весь многолучевой сигнал<br />
(сигналы, отраженные от дна, не рассматриваются).<br />
Различия условий формирования структуры звукового поля в<br />
Рис.3. Структура взрывных сигналов,<br />
принятых в разных регионах Мирового<br />
океана.<br />
Рис.4.Экспер<strong>им</strong>ентальная завис<strong>им</strong>ость<br />
τ/N от R/N<br />
различных регионах приводят к различным пропорциям в протяженности пологого и крутого участков<br />
усеченной “τ-R”-диаграммы, к большему количеству раздельно принятых на некотором расстоянии от<br />
источника четверок элементарных сигналов в одном регионе по сравнению с количеством аналогичных<br />
четверок, принятых на том же расстоянии в другом регионе (см. рис.3).<br />
Для описания завис<strong>им</strong>ости τ/N от R/N по аналогии с работой [4] использовалась степенная функция:<br />
τ ( a R )<br />
N<br />
= ⋅ N<br />
p (1)<br />
<strong>Н</strong>а основе проведенного нами анализа временной структуры звукового поля, формируемого в ПЗК,<br />
усеченные “τ-R” – диаграммы были построены для большинства обследованных нами регионов Мирового<br />
океана. <strong>Н</strong>асколько хорошо экспер<strong>им</strong>ентальные значения τ(R) описываются соотношением (1) можно<br />
судить по рис.4. В таблице 1 приведены значения параметров усеченных “τ-R” – диаграмм,<br />
экспер<strong>им</strong>ентально определенные для глубоководных регионов, где наблюдались первая и вторая группы<br />
элементарных сигналов. Экспер<strong>им</strong>ентальные материалы подтверждают целесообразность и<br />
183
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
эффективность использования усеченных “τ-R” – диаграмм для выявления региональных различий в<br />
структуре звукового поля точечного источника,<br />
Табл. 1. Экспер<strong>им</strong>ентальные значения параметров<br />
формируемого в ПЗК.<br />
усеченной “τ-R” – диаграммы<br />
Для оценки повторяемости экспер<strong>им</strong>ентальных Регион Мирового океана a р<br />
значений параметров усеченных “τ-R” – диаграмм<br />
0.0147 1.73<br />
были проанализированы материалы повторных Черное море<br />
0.0142 1.85<br />
экспер<strong>им</strong>ентов, проведенных в Черном, Японском и Охотское море (юго-западная часть) 0.0169 1.97<br />
Охотском морях (также представленные в табл.1).<br />
Опыты проводились дважды практически вдоль одних<br />
и тех же трасс с различием во времени от 2-3 месяцев<br />
Прикамчатский регион Тихого океана<br />
Гренландское море<br />
Прикурильский регион Тихого океана<br />
0.0154<br />
0.0141<br />
0.0158<br />
2.2<br />
2.28<br />
2.3<br />
(в южной части Охотского моря) до 7 лет (в Черном<br />
0.0152 2.34<br />
Охотское море (южная часть)<br />
море). Параметры усеченных “τ-R” – диаграмм<br />
0.0158 2.44<br />
Средиземное море (западная часть) 0.0155 2.9<br />
определялись для четверок, средние сигналы которых<br />
<strong>Н</strong>орвежское море (южная часть)*** 0.0095 3.11<br />
описывали до 6-8 полных циклов относительно оси<br />
0.0156 3.6<br />
ПЗК (N=1…8). Глубины подрыва зарядов ВВ и Японское море<br />
0.0157 3.87<br />
расположения приемников в этих опытах несколько Тихий океан (сороковые широты)* 0.0136 5.3<br />
отличались от глубины расположения оси ПЗК. Опыты, Тихий океан (сороковые широты)** 0.0142 5.6<br />
проведенные в Японском море, различались так же и Средиземное море (восточная часть) 0.0155 5.6<br />
положением приемного судна (у западной или Филиппинское море 0.0134 6.3<br />
восточной конечных точек трассы). Тем не менее, * - вдоль 39° сев.широты (~ 154-160º вост.долготы)<br />
** - вдоль 162° вост.долготы (~42-44° сев.широты)<br />
параметры «а» и «р» усеченных “τ-R” – диаграмм,<br />
*** - для четверок, касающихся поверхности<br />
определенных для каждого из двух проведенных в<br />
регионе опытов, различались весьма незначительно. Основная причина этих различий, как показывают<br />
расчеты, в межгодичных изменениях гидрологических условий вдоль трассы распространения и в<br />
различающемся (от опыта к опыту) расположении источника и приемника относительно оси ПЗК.<br />
Временная структура звукового поля формируемого в приосевой части ПЗК. Присутствие на<br />
усеченной “τ-R”-диаграмме пологого участка объясняется своеобразной формой профиля c(z) вблизи оси<br />
ПЗК. Действительно, как отмечалось в работе [5], достаточно реалистичное описание условий<br />
распространения звука вблизи оси ПЗК может дать аппрокс<strong>им</strong>ация профиля c(z) функциями типа<br />
гиперболического косинуса. Для такого профиля c(z) характерно практически полное отсутствие различий<br />
в горизонтальных составляющих скорости распространения сигнала вдоль различных лучей. Расчет для<br />
временной структуры поля, формируемого<br />
в приосевой части ПЗК, дает весьма сложную картину:<br />
наблюдается наложение друг на друга четверок,<br />
принадлежащих разным ветвям, нарушается привычная<br />
последовательность сигналов [6]. Как правило, в<br />
большинстве регионов Мирового океана наблюдается<br />
аналогичная картина. Исключением является Черном море<br />
[7]. Центральная часть Черного моря формой приосевой<br />
части профиля c(z), нижней границей ПЗК принципиально<br />
отличается от этих регионов - градиент скорости звука с<br />
глубиной монотонно понижается. Оконечная часть<br />
взрывного сигнала, принятого в Черном море на расстоянии<br />
200 км и более от источника представляет собой<br />
квазигармонический сигнал с плавно меняющейся частотой<br />
(рис.5.). Более того, оконечная часть сигнала <strong>им</strong>еет явно<br />
блочную структуру, хорошо согласующуюся с блочной<br />
структурой спектра взрывного сигнала. В отличие от ПЗК,<br />
формируемого, напр<strong>им</strong>ер, в Японском море [6], где<br />
наблюдается определенный “хаос” в структуре оконечной<br />
части взрывного сигнала, для Черного моря расчеты,<br />
выполненные по программе В.П.Тебякина [8], дают весьма упорядоченную картину последовательности<br />
приходящих в точку приема четверок элементарных сигналов, распространяющихся вдоль приосевых<br />
лучей. Согласно проведенным расчетам плотность прихода четверок в точку приема плавно уменьшается<br />
по мере удаления от конца сигнала. Учитывая эту особенность и пренебрегая незначительными<br />
184<br />
Рис.5. Оконечная часть взрывного сигнала,<br />
распространяющегося в Черноморском ПЗК.
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
изменениями интервала между соседн<strong>им</strong>и четверками, нетрудно показать в лучевом приближении, что<br />
Черноморский ПЗК представляет собой систему, резонирующую на некоторой частоте f o , меняющейся во<br />
времени в соответствии с изменением средней плотности прихода четверок сигналов в точку приема. При<br />
этом частота f o связана с интервалом между центрами соседних четверок ∆t соотношением:<br />
f o =(2·∆t) -1 (2)<br />
Рассчитав изменения интервала между четверками в завис<strong>им</strong>ости от времени распространения,<br />
нетрудно оценить для различных расстояний от источника частотно-временную характеристику<br />
оконечной части взрывных сигналов, распространяющихся в Черноморском ПЗК. Методика,<br />
разработанная в Акустическом <strong>институт</strong>е [7], позволяет провести оценку частотно-временной<br />
характеристики сигналов по экспер<strong>им</strong>ентальным материалам. <strong>Н</strong>е представляет особого труда решить и<br />
обратную задачу – по частотно-временной характеристике оконечной части взрывного сигнала, используя<br />
соотношение (2) определить завис<strong>им</strong>ость интервала между центрами четверок от времени их<br />
распространения.<br />
Эволюция классических четверок при дальнем распространении. Анализируя материалы опыта,<br />
проведенного в Филиппинском море [9], при оценках фазового (независящего от частоты) сдвига между<br />
однолучевыми сигналами классической четверки, различающ<strong>им</strong>ися на одно касание каустики, мы<br />
столкнулись с отличием этого сдвига от кратного 90º, достигающ<strong>им</strong> 10-20⁰. Это явление было объяснено<br />
расщеплением сигнала (луча) в точке заворота при ее расположении у границы водных слоев,<br />
различающихся градиентом скорости звука (при повышении его абсолютного значения по мере удаления<br />
от оси ПЗК), появлением дополнительного сигнала, приходящего в точку приема практически<br />
одновременно с основным (временной интервал между н<strong>им</strong>и не превышал 1 мс), но отличающегося от<br />
него на одно касание каустики, их векторным сложением. Аналогичное явление наблюдалось нами и в<br />
других регионах Мирового океана, где хорошо просматривалось и явное расщепление сигналов<br />
некоторых четверок, превращавшихся при удалении от источника на 250-300 км и более в группы трудно<br />
разделяемых сигналов [10,11]. При этом между собой эти группы практически слившихся сигналов<br />
превосходно разделялись (как и классические четверки на близких расстояниях от источника). Более того,<br />
местоположение этих групп в структуре многолучевого сигнала хорошо согласуется с усеченной “τ-R”-<br />
диаграммой, построенной для соответствующего региона по экспер<strong>им</strong>ентальным материалам,<br />
полученным на близких расстояниях от источника. Эволюция классических четверок на построении<br />
усеченной “τ-R”-диаграммы практически никак не сказывалась.<br />
Явного влияния эволюции четверок на результаты анализа частотно-временных характеристик<br />
оконечной части взрывного сигнала, распространяющегося в Черноморском ПЗК также обнаружено не<br />
было. Хотя согласно расчетам при касании каустик незначительные отклонения от 90⁰ фазового сдвига<br />
должны приводить к незначительным же отклонениям частоты f o от ее прогнозируемого значения.<br />
В заключение отмет<strong>им</strong> плодотворность проведенных исследований структурообразующей роли<br />
классических четверок чисто водных сигналов при анализе материалов по дальнему распространению<br />
взрывных сигналов в ПЗК. Выявлены региональные различия условий распространения звука, дано<br />
объяснение уникальному явлению, наблюдаемому при дальнем распространении в Черном море, -<br />
превращению оконечной части многолучевого взрывного сигнала в квазигармонический сигнал с плавно<br />
меняющейся частотой, <strong>им</strong>еющий блочную структуру.<br />
Л И Т Е Р А Т У Р А<br />
1.- Вадов Р.А. О некоторых гидроакустических характеристиках взрывного сигнала. // Акуст. журн., т. 40, N4, 1994, стр. 677-679<br />
2. - Ewing W.M., Worzel J.L. Long-range sound transmission. // Geol. Soc. Amer. Mem.,1948,V.27,Pt.3, p.1-32.<br />
3.- Вадов Р.А. Региональные особенности формирования временной структуры звукового поля в подводном звуковом канале. // В кн.<br />
Акустика океана, сб. трудов школы-семинара акад. Л.М. Бреховских, М.: "ГЕОС", 1998, стр.156-160.<br />
4.- Лерой К. Распространение звука в Средиземном море. // В кн. Подводная акустика. Пер. с англ., М.: Мир, 1970, стр.274-324<br />
5. - Толстой И., Клей К.С. Акустика океана. Пер. с англ. М.:Мир, 1969, 302 с.<br />
6.- Вадов Р.А. Поле точечного источника в подводном звуковом канале Японского моря. // Акуст. журн., 1998, т. 44, № 5, с.749-756.<br />
7.- Вадов Р.А. <strong>Н</strong>екоторые результаты исследований структуры звукового поля точечного источника в подводном звуковом канале Черного<br />
моря. // Акуст. журн., т.44, N6, 1998, C.614-621.<br />
8.- Тебякин В.П. и др. Raymod52 - базовый комплекс программ для вычисления звуковых полей в слоисто-неоднородном океане лучевым<br />
методом// Отчет АКИ<strong>Н</strong>, Москва, 1990<br />
9.- Вадов Р.А. <strong>Н</strong>аблюдения за набегом фазы при касании акустическ<strong>им</strong> сигналом каустики. // журнал Океанология, 2002, том 42, №2, стр.<br />
187-195<br />
10.- Вадов Р.А., Панкова С.Д. Структура классических четверок, формируемых в подводном звуковом канале Японского моря. // Сборник<br />
трудов XX сессии РАО, том 2, М.: ГЕОС, 2008, стр.189-193.<br />
11.- Вадов Р.А. Дальнее распространение звука в северо-западной части Тихого океана. // Акуст. журн. .,2006, т.52, №4, стр. 448-463<br />
185
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
УДК 534.29.23<br />
<strong>Н</strong>.К. Абакумова<br />
ХАРАКТЕРИСТИКИ ГИДРОАКУСТИЧЕСКОГО ПОЛЯ В СЕВЕР<strong>Н</strong>ОМ МОРЕ<br />
Г<strong>Н</strong>Ц РФ ФГУП «<strong>Акустический</strong> <strong>институт</strong> <strong>им</strong>. акад. <strong>Н</strong>.<strong>Н</strong>. <strong>Андреева</strong>»<br />
Россия, 117036 Москва, ул. Шверника, д.4<br />
Тел.: (495) 126-0100; Факс: (495) 126-8411; E-mail: bvp@akin.ru<br />
Приведены результаты компьютерного моделирования влияния полученных в реальных условиях данных по<br />
океанологическ<strong>им</strong> характеристикам на закономерности спада звукового поля с расстоянием, что необход<strong>им</strong>о для изучения<br />
возможности работы гидроакустических средств, акустической томографии и мониторинга прибрежных акваторий.<br />
<strong>Н</strong>астоящая работа посвящена сопоставлению натурного экспер<strong>им</strong>ента и численного расчета звукового поля при выборе<br />
соответствующей модели дна мелкого моря, в условиях, когда нет достаточной информации о характеристиках дна и<br />
параметрах грунта. Представляются данные исследований звуковых полей в реальных мелководных волноводах в лучевом<br />
приближении с моделью дна в виде однородного жидкого поглощающего полупространства. Глубина места вдоль трассы<br />
изменялась в пределах от 56м до 87м. Глубина тонального источника звуковых сигналов - 35м, прием сигналов<br />
осуществлялся на горизонте 30м. Экспер<strong>им</strong>ентальные законы спада звукового поля с расстоянием для исследуемой<br />
частоты 112Гц сопоставляются с результатами расчетов в лучевом приближении для пяти предполагаемых типов<br />
грунта дна рассматриваемого района (песка, илистого песка, песчанистого ила, ила, глинистого ила), для осадков с<br />
различными акустическ<strong>им</strong>и свойствами. Проведено численное моделирование спада интенсивности звукового поля в воде<br />
по предварительной оценке отражающих свойств дна.<br />
В апреле 1974 года в Северном море Акустическ<strong>им</strong> <strong>институт</strong>ом были проведены комплексные<br />
гидрофизические и акустические исследования. Многодневные измерения характеристик <strong>им</strong>пульсных<br />
акустических сигналов проводились на трассе длиной около 150км. Вблизи источника на расстояниях до<br />
2.5км проводились вертикальные разрезы звукового поля, а, в основном, анализировались горизонтальные<br />
разрезы звукового поля. В районе работ выполнялись измерения вертикальных профилей температуры,<br />
солености. Проанализированы изменения энергетических характеристик акустических сигналов при<br />
отрицательном, в среднем, градиенте скорости звука в среде с неравномерной стратификацией воды по<br />
глубине. По трассе профиль скорости звука "С(z)" также не оставался постоянным [1].<br />
Путем маневрирования приемного судна удавалось производить подробную непрерывную<br />
регистрацию сигналов на каждой из исследуемых частот. Так, в интервале расстояний от 0,5 до 5км<br />
приемное судно несколько раз повторяло переход на близкие расстояния, снова ложась в дрейф,<br />
излучающее судно стояло на якоре в исходной точке трассы. При таких повторных маневрах удавалось<br />
проводить непрерывную регистрацию сигнала вдоль этого участка трассы.<br />
Для мелководных районов доминирующую роль в спаде звукового поля с расстоянием I(r) играют<br />
потери при отражении от дна и поверхности моря [2,3]. Методы численного моделирования позволяют<br />
разработать различные геолого-акустические модели дна мелкого моря, адекватно объясняющие<br />
экспер<strong>им</strong>ентальные результаты [4,5].<br />
Что касается модели мелководного района Северного моря, то при неоднородной трассе, на ближнем<br />
участке трассы распространение происходит как в плоском слое при отрицательном градиенте скорости<br />
звука. <strong>Н</strong>а дальних расстояниях – как в клине, при аналогичном профиле скорости звука. Спад<br />
интенсивности звукового поля с расстоянием в этом случае так же, как и в глубоком море, будет<br />
определяться геометрическ<strong>им</strong> расхождением, дополнительным поглощением и рассеянием звука в водной<br />
среде, кроме того, потерями интенсивности при отражении от границ моря.<br />
Рис. 1. Завис<strong>им</strong>ость скорости звука от глубины для нескольких расстояний r.<br />
186
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Гидрологические условия, при которых проводился опыт в Северном море (рис.1 ), 1 - на расстоянии<br />
r ~ 0км от излучающего судна, 2 - r ~ 57км, 3 – на расстоянии r ~ 180км, характеризовались<br />
макс<strong>им</strong>альным перепадом скорости звука по глубине на расстоянии r несколько километров от источника:<br />
около ∆c ≈ 1.4м/с на ~ 40м глубины, на конце трассы - ∆c ≈ 2.4м/c на 45м глубины. Модель дна<br />
выбиралась в виде однородного жидкого поглощающего полупространства, характеризуемого<br />
параметрами n = n 0 (1+iη) - комплексный показатель преломления в дне, где η = Jm(n)/Re(n). Для принятой<br />
модели дна в виде жидкого поглощающего полупространства параметрами грунта являются n - отношение<br />
скорости, которая наблюдалась в слоях моря у дна с 0 , к скорости звука в грунте "с", с 0 -скорость звука в<br />
воде. Кроме того, η-коэффициент потерь, η-отношение мн<strong>им</strong>ой части волнового числа в грунте к<br />
действительной части волнового числа. Отношение плотности грунта к плотности воды m-является<br />
треть<strong>им</strong> параметром для жидкого поглощающего полупространства.<br />
В исследуемом районе, как известно из литературы, температура воды летом в придонных слоях<br />
колеблется от 6°C до 17°C, придонные осадки содержат в поверхностном слое фракцию песка до 50%<br />
(диаметром более 0.1мм) Для таких осадков тип грунта предположительно определяется как "песок" и<br />
"илистый песок" [2].<br />
Верхняя граница моря задавалась в виде взволнованной поверхности со среднеквадратичной высотой<br />
неровностей σ, определяемой поверхностным волнением. В поверхностных слоях воды наблюдались<br />
распределения c(z,r) от приповерхностного канала в начале трассы (левый профиль на рис.1) до<br />
отрицательных градиентов - в конце трассы (правый профиль). По трассе скорость звука у дна c дн всегда<br />
была меньше скорости звука в под поверхностных слоях воды (c o ).<br />
Экспер<strong>им</strong>ентальные данные горизонтального разреза звукового поля для частоты 112Гц (рис. 2)<br />
нанесены в виде “точек”. Методом численного моделирования анализировались звуковые поля с учетом<br />
влияния дна и поверхности моря.<br />
Расчет завис<strong>им</strong>ости I(r), показанной на рисунке, проведен для параметров грунта, соответствующих<br />
значениям коэффициента отражения для n = 0,9; η = 0,015; m = 1,8 [2].<br />
По оси абсцисс рис. 2 показано горизонтальное расстояние r[км], по оси ординат – изменения<br />
интенсивности I[дБ] звукового поля с расстоянием. Сплошной линией-1 показаны изменения<br />
Рис.2. Завис<strong>им</strong>ость интенсивности I звукового поля от расстояния r с учетом рельефа дна, поглощающего<br />
жидкого полупространства и изменения профилей скорости звука C(z,r), для двух состояний поверхности моря.<br />
187<br />
интенсивности I® по цилиндрическому закону,<br />
сплошной линией 2 - изменения интенсивности<br />
I® по сферическому закону, 3 - для ровной<br />
поверхности моря – грунт “илистый песок”, 4 –<br />
волнение моря – 5 (V)баллов, грунт “илистый<br />
песок”.<br />
Рис. 3. Завис<strong>им</strong>ость интенсивности I звукового<br />
поля от расстояния r, расчет по лучевой теории для<br />
ровной поверхности моря и грунта типа “песок”.<br />
Во время опыта наблюдалось волнение моря 4-<br />
5 баллов. (Волнение моря 4балла соответствует σ<br />
= 0,24м, волнение моря 5баллов соответствует σ=
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
0,77м и скорости ветра -11,5м/c). Сплошной линией _ 4 представлен расчет I(r) с шагом ∆r = 1км при<br />
волнении моря, при тех же параметрах грунта “илистого песка”. 3 - расчет I(r) с шагом ∆r = 5км, при σ =<br />
0м.<br />
<strong>Н</strong>а рис. 3 представлена завис<strong>им</strong>ость интенсивности I звукового поля от расстояния r для ровной<br />
поверхности моря при σ = 0м и грунта типа “песок”. Сплошной линией (1) показан закон спада звукового<br />
поля, соответствующий цилиндрическому закону (I=-10lgr), и сферическому (I = -20lgr) -2 закону. При<br />
этом за 0дБ взят уровень звукового поля в однородном безграничном пространстве на расстоянии r = 1км.<br />
Экспер<strong>им</strong>ентальные завис<strong>им</strong>ости, приведенные на рис. 3, показаны точками. Расчет завис<strong>им</strong>ости I®, на<br />
рис. 3, проведен для параметров грунта, соответствующих макс<strong>им</strong>альным значениям коэффициента<br />
отражения от дна n= 0.81, η = 0.03; m = 2.1 [2].<br />
При расчетах для грунта типа “илистый песок“ и волнении 5балов экспер<strong>им</strong>ентальные и расчетные<br />
завис<strong>им</strong>ости спада звукового поля с расстоянием, определяемые потерями при отражении от дна и<br />
поверхности моря, находятся в лучшем соответствии. Коэффициент отражения V(χ) от взволнованной<br />
поверхности моря учитывался по формуле Рэлея, где σ– среднеквадратичное смещение поверхности, k –<br />
волновое число, χ – угол скольжения луча у поверхности воды; {V(χ)= exp(-2k 2 σ 2 sin 2 (χ)}.<br />
В наилучшем согласии с опытными данными оказывается расчетная кривая, соответствующая<br />
поверхностному волнению рис. 2,(4). Как видно, расчетные законы спада звукового поля до дистанций<br />
r < 50 км в отсутствии и при наличии поверхностного волнения практически совпадают между собой.<br />
Заметное расхождение между н<strong>им</strong>и наблюдается для дистанций r > 50 км, вызванное потерями при<br />
отражении от неровной поверхности.<br />
Экспер<strong>им</strong>ентальная завис<strong>им</strong>ость звукового поля от глубины I(z) (вертикальный разрез) вблизи<br />
источника показан на рис. 4 жирной линией. Здесь различными линиями показаны расчетные<br />
завис<strong>им</strong>ости I(z) на расстояниях r ~ 0.5км. Для исследований вертикальной структуры звукового поля I(z),<br />
в опыте проводился спуск и подъем "приемника". <strong>Н</strong>а дистанциях r от излучателя, соответствующих: а) r =<br />
0,53 – 0,56км осуществлялся спуск, б) на дистанции r = 0,47-0,52км – подъем. Указанные расстояния r<br />
соответствуют интервалу времени начала и конца вертикального разреза для частоты тонального сигнала<br />
112Гц. При измерениях вертикальной структуры использовался электродинамический излучатель,<br />
излучающее судно стояло на якоре. Прием сигналов проходил в дрейфе приемного судна, спуск<br />
Рис. 4. Завис<strong>им</strong>ости звукового поля от глубины I(z) вблизи источника: экспер<strong>им</strong>ент r ~ 0.52-0.56км,<br />
расчетные завис<strong>им</strong>ости I(z) показаны различными линиями на тех же расстояниях с шагом ∆r = 0.02км.<br />
приемника проводился, начиная с десяти метровой глубины, уровни шумов вычитались из суммарного<br />
сигнала. Интерференционная структура звукового поля претерпевала существенные вариации с<br />
изменением расстояния. Причем, для дистанций, отличающихся друг от друга только на ~ 60м, в<br />
вертикальных разрезах изменяется местоположение макс<strong>им</strong>умов и мин<strong>им</strong>умов. <strong>Н</strong>а рисунке 4 сплошной<br />
тонкой линией показан расчетный вертикальный разрез на дистанции r =0,48км, штриховой линией – на<br />
дистанции r = 0,5км, сплошной жирной линией - на r = 0,52км, точечной линией – на r = 0,54км, линией с<br />
188
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
точками – на r = 0,56км, линией со звездочками – на дистанции r = 0,58км. Результаты расчетов для такого<br />
дна показали, что, как в опыте так, и в расчете наблюдается соответствие числа мин<strong>им</strong>умов и макс<strong>им</strong>умов<br />
интерференционной структуры I(z), что показывает на присутствие трех нормальных волн вблизи<br />
источника. Вертикальные разрезы I(z) оказались более чувствительными к изменению дистанции между<br />
судами, чем к изменению параметров грунта.<br />
В результате сопоставления данных экспер<strong>им</strong>ента и расчетов, проведены оценки параметров грунта,<br />
определялся тип грунта, наиболее адекватно соответствующий основным законам распространения звука<br />
в этом мелководном районе. Проанализирована роль донных осадков для модели дна в виде жидкого<br />
полупространства и волнения моря во время опыта на потери интенсивности I звукового поля. В спаде<br />
звукового поля с расстоянием I(r) доминирующую роль играют потери при отражении от дна и<br />
поверхности моря. Что касается модели мелководного района, то в нашем случае при неоднородной<br />
трассе, в спаде звукового поля I(r) определяющ<strong>им</strong>и являются значения скорости продольных волн в<br />
грунте "с", n = c o /c - комплексного показателя преломления в дне.<br />
Л И Т Е Р А Т У Р А<br />
1. Wille P. Thiele R.., Schunk E.. Shallow-water sound attenuation in a standard area // J. Acoust. Soc. Amer. 1973. V.54. № 6.<br />
Pt.2. P. 1708-1726.<br />
2. Абакумова <strong>Н</strong>.К., Галкин О.П. Угловая завис<strong>им</strong>ость коэффициента отражения от дна для различных типов морских<br />
осадков / <strong>Н</strong>аучно - техн. сб. Вопросы судостроения, сер. Акустика, 1980, вып.14, C. 90-100.<br />
3. Абакумова <strong>Н</strong>.К. Исследования характеристик звукового поля в восточной части Охотского моря // Акуст. журн. 2002.,<br />
Т.48. №2. С.149-155.<br />
4. Knobles D.P., Koch R.A., Thonpson L.A., Focke K.C., Eisman P.E. Broadband sound propagation in shallow water and<br />
geoacoustic inversion // J. Acoust. Soc. Amer. 2003. V.113. №1. P.206-222.<br />
5. Абакумова <strong>Н</strong>.К. Распространение звука в Северном море // Акуст. ж. 2008. Т.54, №4, С.559-564.<br />
УДК 534.222.1<br />
А.Л. Вировлянский, А.Ю. Казарова, Л.Я. Любавин<br />
ФОКУСИРОВКА АКУСТИЧЕСКИХ ПОЛЕЙ <strong>Н</strong>А ДЛИ<strong>Н</strong><strong>Н</strong>ЫХ ТРАССАХ В ГЛУБОКОМ МОРЕ С<br />
ИСПОЛЬЗОВА<strong>Н</strong>ИЕМ ОБРАЩЕ<strong>Н</strong>ИЯ З<strong>Н</strong>АКА ВРЕМЕ<strong>Н</strong>И<br />
Учреждение Российской академии наук Институт прикладной физики РА<strong>Н</strong><br />
Россия, 60950 <strong>Н</strong>ижний <strong>Н</strong>овгород, ул. Ульянова, д. 46<br />
Тел.: (831) 416-4784; Факс: (831) 436-5976; E-mail: viro@hydro.appl.sci-nnov.ru<br />
Выполнен теоретический анализ метода фокусировки поля в глубоководном подводном звуковом канале (ПЗК) путем<br />
переизлучения принятого сигнала с обращением знака времени. Рассматривается простейшая ситуация, когда для<br />
излучения и приема используются точечные источники и приемники. Обсуждаемый метод фокусировки обычно<br />
пр<strong>им</strong>еняется на относительно коротких дистанциях, меньше или порядка 10 км. <strong>Н</strong>ашей целью является изучение<br />
потенциальных возможностей метода при работе на существенно более длинных трассах, на которых уже может<br />
проявляться хаотическая динамика лучевых траекторий. Методами численного моделирования исследованы<br />
характеристики сфокусированного поля в типичном ПЗК с флуктуациями показателя преломления, вызванными<br />
случайными внутренн<strong>им</strong>и волнами. Основное вн<strong>им</strong>ание уделено исследованию ширины фокального пятна и интенсивности<br />
поля в его центре. Показано, что распределение амплитуды внутри фокального пятна в условиях развитого лучевого хаоса<br />
может быть с хорошей точностью предсказано в рамках приближения геометрической оптики. В том же приближении<br />
удается оценить и пиковое значение амплитуды поля в точке фокусировки.<br />
Широко известный метод фокусировки звукового поля в окрестностях заданной точки ПЗК<br />
основан на переизлучении сигнала, принятого из этой точки, в обратном направлении с изменением знака<br />
времени [1,2]. Важным достоинством метода обращения времени является его пр<strong>им</strong>ен<strong>им</strong>ость в случайнонеоднородной<br />
среде. Более того, наличие случайных неоднородностей приводит даже к существенному<br />
уменьшению размера фокального пятна по сравнению со случаем однородного пространства или<br />
регулярного (плоскослоистого) волновода [1,2]. Количественная оценка влияния случайных<br />
неоднородностей требует пр<strong>им</strong>енения методов теории распространения волн в случайных средах. Они<br />
необход<strong>им</strong>ы для расчета функции когерентности звукового поля. Задача вычисления функции<br />
когерентности относительно просто решается в статистически однородной среде с использованием так<br />
называемого марковского приближения [3]. Однако обобщение полученных результатов на случай<br />
волновода требует введения дополнительных приближений и довольно громоздких выкладок [1]. В нашей<br />
работе показано, что простая аналитическая оценка пиковой амплитуды поля в точке фокусировки, а<br />
также закон спадания амплитуды поля внутри фокального пятна могут быть легко найдены в<br />
приближении геометрической оптики.<br />
В пренебрежении горизонтальной рефракцией волн рассматривается двумерная модель ПЗК в<br />
глубоком море с полем скорости звука crz (, ) = c() z + δ crz (, ) , где r – дистанция, z – глубина, c( z ) –<br />
189
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
невозмущенный профиль скорости звука, δ crz ( , ) – слабое возмущение, вызванное случайными<br />
внутренн<strong>им</strong>и волнами, статистика которых задается эмпирическ<strong>им</strong> спектром Гарретта - Манка [4,5]. В<br />
данной работе мы ограничиваемся анализом возмущения, не зависящего от времени t , то есть пользуемся<br />
приближением замороженных неоднородностей. Предполагается, что для формирования поля<br />
используется приемно-излучающий элемент, расположенный в точке (0, z<br />
0)<br />
и излучающий сигнал с<br />
i t<br />
комплексной амплитудой wt () = ∫ dΩw% ( Ω)<br />
e − Ω . Сигнал, регистрируемый в точке (, rz ), равен<br />
∞<br />
−Ω i t<br />
ur (, z, t) = ∫ dΩGrz (,, Ω) w% ( Ω) e ,<br />
(1)<br />
−∞<br />
где GrzΩ (,, ) – функция Грина уравнения Гельмгольца, то есть поле монохроматического источника в<br />
точке (0, z<br />
0)<br />
, работающего на несущей (угловой) частоте Ω .<br />
Пр<strong>им</strong>енение метода обращения времени для фокусировки поля в заданную точку ПЗК (, rz )<br />
осуществляется в два этапа. Вначале в данную точку помещается вспомогательный точечный источник,<br />
который излучает пробный <strong>им</strong>пульс wt (). Пользуясь теоремой вза<strong>им</strong>ности и формулой (1), легко видеть,<br />
что после этого в точке (0, z<br />
0)<br />
будет принят сигнал urzt (, ,). Следующ<strong>им</strong> шагом является излучение из<br />
точки (0, z<br />
0)<br />
сигнала w () t u( r, z, T t)<br />
1<br />
= − , где T – некоторая задержка. Вновь пользуясь формулой (1),<br />
получаем выражение для возбужденного так<strong>им</strong> образом звукового поля<br />
∞<br />
∗<br />
∗ iΩ( T−t)<br />
u1 (, r z, t) = ∫ dΩG(,, r z Ω) G (, r z, Ω) w% ( Ω) e .<br />
(2)<br />
−∞<br />
Для простоты далее будет считать, что T = 0 . Макс<strong>им</strong>ального значения амплитуда сигнала u<br />
1<br />
достигает<br />
на глубине z = z (в выбранной точке фокусировки) в момент времени t = 0 . <strong>Н</strong>а рис. 1 показана величина<br />
u () 1<br />
t , рассчитанная методом параболического уравнения для модели глубоководного ПЗК с<br />
невозмущенным профилем скорости звука cz ( ), <strong>им</strong>еющ<strong>им</strong> мин<strong>им</strong>ум (ось ПЗК) на глубине 0.7 км. Расчет<br />
выполнен для конкретной реализации случайного возмущения δ crz (, ) на дистанции наблюдения r=1000<br />
км. Источник располагался на оси ПЗК, а глубина точки фокусировки z = 1.5 км. При моделировании<br />
2<br />
πt<br />
wt () = exp − −iΩ t с эффективной длительностью T<br />
0<br />
= 0.033 с на несущей<br />
использовался сигнал ( 2<br />
2T<br />
0 )<br />
0<br />
частоте f 0<br />
=Ω<br />
0<br />
/ (2 π ) = 250 Гц. Как и должно быть, сигнал <strong>им</strong>еет ярко выраженный макс<strong>им</strong>ум при t = 0 .<br />
<strong>Н</strong>а рис. 2 показана функция u1 (, r z ,0) при r = 1000 км, то есть амплитуда поля в момент времени t = 0 в<br />
вертикальном сечении волновода на дистанции наблюдения. Отмеченный стрелкой пик на глубине z<br />
представляет собой вертикальное сечение фокального пятна. Для детального анализа его формы<br />
воспользуемся приближением геометрической оптики. При этом поле в точке наблюдения представляет<br />
суперпозицию сигналов, пришедших по различным лучевым траекториям.<br />
25<br />
0<br />
20<br />
1<br />
|u 1<br />
|, отн. ед.<br />
15<br />
10<br />
z, км<br />
2<br />
5<br />
3<br />
0<br />
-2 -1 0 1 2<br />
t, с<br />
Рис. 1. Звуковой <strong>им</strong>пульс в точке наблюдения с<br />
координатами r=1000 км и z = 1.5 км,<br />
сфокусированный методом обращения времени.<br />
190<br />
0 5 10 15 20 25<br />
|u (r,z,0)|, отн. ед.<br />
1<br />
Рис. 2. Вертикальное сечение поля на дистанции<br />
наблюдения r=1000 км. Стрелкой показан пик,<br />
представляющий собой вертикальное сечение<br />
фокального пятна.
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
В рамках гамильтонова формализма лучевая траектория в каждой точке дистанции задается своей<br />
координатой z и обобщенным <strong>им</strong>пульсом (или, для краткости, просто <strong>им</strong>пульсом) p = tg χ , где χ – угол<br />
скольжения луча [4,5]. В приближении геометрической оптики<br />
iΩS / c0<br />
Grz (,, Ω ) =∑ Ae ν ,<br />
(3)<br />
где индекс ν нумерует лучи, попадающие в точку (,) rz, c<br />
0<br />
– скорость звука на оси невозмущенного<br />
ПЗК, Sν (,) r z и Aν (,) rz – эйконал и амплитуда ν -го луча, соответственно. Явное выражение для<br />
амплитуды луча в малоугловом приближении <strong>им</strong>еет вид [4,5]<br />
k0<br />
Aν<br />
=<br />
,<br />
(4)<br />
2 π ∂z/<br />
∂p<br />
k<br />
где<br />
0 0 0<br />
ν<br />
=Ω / c , p<br />
0<br />
– начальный <strong>им</strong>пульс луча. Подставляя (3) и (4) в (2), получаем<br />
u1(,,) r z t = ∑ AνAν′ w( t− Sν(,)/ r z c0 + Sν′<br />
(, r z)/ c0)<br />
.<br />
(5)<br />
ν,<br />
ν′<br />
<strong>Н</strong>а рассматриваемой нами дистанции r = 1000 км лучевой хаос уже хорошо развит и общее количество<br />
лучей, попадающих в точку (, rz, ) велико, а их фазы независ<strong>им</strong>ы. Поэтому при t = 0 и z = z в (5)<br />
естественно ограничиться учетом слагаемых ν = ν ′ , которые суммируются в фазе. Аналогично поступ<strong>им</strong><br />
и в точках с координатами z близк<strong>им</strong>и к z . Пользуясь известной формулой ∂S/<br />
∂ z = p , фигурирующую<br />
в правой части (5) разность эйконалов для z близких к z представ<strong>им</strong> в виде<br />
Sν(,) r z −Sν(, r z) pν( z− z)<br />
, где p ν<br />
– <strong>им</strong>пульс ν -го луча. Сохраняя в сумме (5) лишь слагаемые с<br />
ν = ν ′ , получаем<br />
2<br />
⎡ 2<br />
2<br />
pν<br />
( z−<br />
z)<br />
⎤<br />
2<br />
u1(,,0) r z = ∑ Aν<br />
exp ⎢− −ik 2 2 0pν<br />
( z−z)<br />
⎥.<br />
(6)<br />
ν ⎢ 2Tc<br />
⎣<br />
0 0<br />
⎥⎦<br />
<strong>Н</strong>а длинных трассах "выживают" только лучи, захваченные ПЗК, то есть распространяющиеся под углами<br />
скольжения, не превышающ<strong>им</strong>и некоторого макс<strong>им</strong>ального значения χ<br />
max<br />
. Такому углу скольжения<br />
отвечает <strong>им</strong>пульс p<br />
max<br />
= tg χ max<br />
. Для координат z , удовлетворяющих условию z− z T0c0/<br />
pmax,<br />
первым слагаемым в показателе экспоненты в правой части (6) можно пренебречь. <strong>Н</strong>а<br />
тысячекилометровой трассе луч на пути в точку наблюдения рассеивается на множестве<br />
некоррелированных неоднородностей среды.<br />
v 1<br />
v 1<br />
1<br />
0.6<br />
0.2<br />
1<br />
0.6<br />
0.2<br />
1.46 1.48 1.5 1.52 1.54<br />
z, км<br />
Рис. 3. <strong>Н</strong>ормированные завис<strong>им</strong>ости амплитуды поля от<br />
глубины в вертикальном сечении фокального пятна для<br />
четырех реализаций случайного возмущения (сплошные<br />
линии). Пунктирная кривая представляет теоретическую<br />
оценку. Расчеты выполнены для звуковых <strong>им</strong>пульсов на<br />
центральных частотах 250 Гц (вверху) и 400 Гц (внизу).<br />
191<br />
ν<br />
0<br />
Поэтому в силу центральной предельной<br />
теоремы p ν<br />
естественно считать гауссовой<br />
случайной величиной. Полагая, что она к тому<br />
же статистически не зависит от амплитуды луча,<br />
получаем u 1<br />
(,,0) r z = Vv (), z где<br />
( − ) 2<br />
⎡<br />
2 2<br />
k0<br />
p z z ⎤<br />
ν<br />
vz ( ) = exp ⎢−<br />
⎥,<br />
(7)<br />
⎢ 2 ⎥<br />
⎣<br />
⎦<br />
а V – не зависящий от z амплитудный<br />
множитель, оценка которого будет получена<br />
ниже.<br />
<strong>Н</strong>а рис. 3 пунктирной линией показана<br />
функция vz ( ) для точки наблюдения с<br />
координатами r = 1000 км, z = 1.5 км.<br />
Сплошные кривые показывают завис<strong>им</strong>ости от<br />
z отношений v1() z = u1(,,0)/ r z u1(, r z,0)<br />
для z<br />
близких к z при f<br />
0<br />
равном 250 Гц (вверху) и<br />
400 Гц (внизу) для четырех разных реализаций
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
возмущения δ crz (, ). Одна из сплошных кривых в верхней части рисунка показывает растянутое<br />
изображение помеченного стрелкой пика на рис. 2. Оценка<br />
2<br />
p ν<br />
была получена на основе численного<br />
2<br />
расчета лучевых траекторий для различных реализаций нашего возмущения. Величину p ν<br />
можно<br />
приближенно оценить и аналитически [4,5]. Результаты, представленные на рис. 3 показывают, что<br />
функция vz, ( ) заданная формулой (7), неплохо описывает нормированную завис<strong>им</strong>ость амплитуды поля в<br />
вертикальном сечении фокального пятна от координаты z не только для среднего по ансамблю, но даже и<br />
для отдельных реализаций случайного возмущения δ cr (, z)<br />
.<br />
Амплитудный множитель V представляет собой пиковое значение амплитуды поля в центре<br />
фокального пятна. Согласно (6)<br />
2 k0 1 k0<br />
V = ∑ Aν<br />
= ∑ = dp0δ<br />
( z−z( r, p0, z0)).<br />
2 π ∂z/ ∂p<br />
2π<br />
∫ (8)<br />
ν<br />
ν<br />
0 p0=<br />
p0,<br />
ν<br />
В последнем равенстве мы воспользовались известным свойством дельта - функции. Рассмотр<strong>им</strong><br />
величину V , усредненную по интервалу глубин z ± δ z. Пользуясь (8), наход<strong>им</strong><br />
1 z+<br />
δ z k0 δ p0<br />
V ≡ dzV( z) ,<br />
δz∫ =<br />
(9)<br />
z−δ<br />
z<br />
2π δz<br />
где δ p0<br />
– суммарная длительность интервалов начальных <strong>им</strong>пульсов p<br />
0<br />
, отвечающих лучам, которые на<br />
дистанции наблюдения r попадают в интервал глубин z ± δ z. Воспользуемся статистическ<strong>им</strong> подходом<br />
для анализа распределения параметров лучей в случайно-неоднородном волноводе, описанном в работах<br />
[4,5]. В условиях развитого лучевого хаоса, то есть на достаточно длинных трассах, величину<br />
δ p0/(2 pmax)<br />
можно интерпретировать как вероятность того, что луч с произвольно выбранным<br />
начальным обобщенным <strong>им</strong>пульсом p<br />
0<br />
попадет в интервал z ± δ z. С<strong>им</strong>волом Pz ( ) обознач<strong>им</strong> плотность<br />
вероятности распределения координат z лучей на дистанции наблюдения. При δ z малом по сравнению с<br />
характерным масштабом функции Pz<br />
(, r z ) <strong>им</strong>еет место равенство δ p0/(2 pmax) = P( z)<br />
δ z . Подставляя его<br />
в (9), получаем<br />
k0 f0<br />
V = 2 pmax<br />
P( z) pmax<br />
P( z).<br />
2π<br />
= c<br />
(10)<br />
0<br />
Плотность вероятности можно найти численно путем расчета траекторий достаточно плотного веера<br />
лучей, выходящих из точечного источника с начальными <strong>им</strong>пульсами p<br />
0<br />
, равномерно заполняющ<strong>им</strong>и<br />
интервал ( − pmax<br />
, pmax<br />
) . Оценку Pz ( ) дает нормированная гистограмма распределения координат z этих<br />
лучей на дистанции наблюдения. <strong>Н</strong>а длинных трассах такая оценка слабо зависит от конкретной<br />
реализации неоднородностей, использованной в расчетах. В работах [4,5] показано, как можно получить<br />
аналитическую оценку функции Pz. ( ) Сопоставление с результатами прямого расчета поля методом<br />
параболического уравнения показывают, что формула (10) дает оценку пикового значения амплитуды<br />
поля в точке фокусировки с погрешностью 20-30%.<br />
Получена простая аналитическая оценка пикового значения амплитуды поля в точке фокусировки<br />
(10) и формула, задающая завис<strong>им</strong>ость амплитуды от глубины в вертикальном сечении фокального пятна<br />
(7). Сопоставление с результатами прямого расчета поля методом параболического уравнения показывает,<br />
что эти формулы можно пр<strong>им</strong>енять и при описании фокальных пятен в отдельных реализациях среды в<br />
2<br />
условиях развитого лучевого и волнового хаоса. При этом важно, что величины p ν<br />
и Pz ( ), а вместе с<br />
н<strong>им</strong>и и параметры фокального пятна, слабо зависят от дистанции наблюдения.<br />
Практическое значение формул (7) и (10) существенно снижается тем фактом, что они получены в<br />
приближении замороженных неоднородностей. За время распространения сигнала на длинной трассе<br />
параметры среды могут сильно меняться. Поэтому переизлученный сигнал может проходить через,<br />
вообще говоря, уже другие неоднородности. Влияние нестационарности возмущения также сравнительно<br />
просто можно учесть в рамках приближения геометрической оптики. Этот вопрос мы планируем<br />
рассмотреть в другой работе.<br />
192
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Работа выполнена при поддержке программы ОФ<strong>Н</strong> РА<strong>Н</strong> «Фундаментальные основы акустической<br />
диагностики искусственных и природных сред», гранта РФФИ 10-02-00228, гранта «Ведущие научные<br />
школы» <strong>Н</strong>Ш-3700.2010.2 и ФЦП «<strong>Н</strong>аучные и научно-педагогические кадры инновационной России»<br />
(контракт № 02.740.11.0565).<br />
Л И Т Е Р А Т У Р А<br />
1. Dowling D.R., Jackson D.R. Narrow-band performance of phase-conjugate arrays in dynamic random media // J. Acoust. Soc.<br />
Am. – 1992. – V. 91(6) – P.3257–3277.<br />
2. Fink M., Prada C. Acoustic time-reversal mirrors // Inverse Problems – 2001. – V. 17:R1-R32.<br />
3. Рытов С.М., Кравцов Ю.А., Татарский В.И. Введение в статистическую радиофизику. Часть II. Случайные поля. – М:<br />
<strong>Н</strong>аука, 1973. – 464 с.<br />
4. Makarov D., Prants S., Virovlyansky A., Zaslavsky G. Ray and wave chaos in ocean acoustics. – Word Scientific, New Jersey –<br />
2010. – 389 p.<br />
5. Virovlyansky A.L., Kazarova A.Yu., Lyubavin L.Ya. Statistical description of chaotic rays in a deep water acoustic waveguide // J.<br />
Acoust. Soc. Am. – 2007. – V. 121(5) – P.2542–2552.<br />
УДК 534.232<br />
О.С. Громашева, К.В.Бачинский, А.В. Кошелева, Б.Я. Ли, В.А. Юхновский<br />
ИЗМЕРЕ<strong>Н</strong>ИЯ ПРОСТРА<strong>Н</strong>СТВЕ<strong>Н</strong><strong>Н</strong>О-ВРЕМЕ<strong>Н</strong><strong>Н</strong>ОЙ ИЗМЕ<strong>Н</strong>ЧИВОСТИ<br />
РАСПРОСТРА<strong>Н</strong>Е<strong>Н</strong>ИЯ АКУСТИЧЕСКИХ СИГ<strong>Н</strong>АЛОВ, ПРИ<strong>Н</strong>ЯТЫХ ПОЛЕМ РГБ<br />
Тихоокеанский океанологический <strong>институт</strong> <strong>им</strong>. В.И.Ильичева ДВО РА<strong>Н</strong><br />
Россия, 690041, Владивосток, ул. Балтийская , 43<br />
Тел.: (423-2) 311-400; Факс: (423-2) 312-573<br />
E-mail: gromasheva@poi.dvo.ru<br />
В работе представлены результаты исследований, проведенных в 2009-2010г.г. в шельфовой зоне Японского моря.<br />
Измерения проводились на квазистационарных трассах с постоянной глубиной с помощью гидроакустической системы,<br />
разработанной на основе поля дрейфующих РГБ. Решались вопросы модернизации системы и калибровки отдельных ее<br />
компонент. Сравнение результатов обработки полученных данных и результатов численного моделирования позволяет<br />
получить оценки влияния гидрофизических и геоморфологических характеристик района на корреляционные свойства<br />
используемых сигналов.<br />
При проведении измерений на морском гидрофизическом полигоне ТОИ ДВО РА<strong>Н</strong> МЭС<br />
«М.Шульца» в районе бухты Витязь в 2009-2010 гг. использовался аппаратно-программный комплекс на<br />
основе группы позиционированных радиогидроакустических буев (РГБ) [1]. Организация регулярных<br />
измерений требует постоянного совершенствования структурной схемы аппаратурного комплекса,<br />
отработки методики измерений. Для сопоставления получаемых результатов, полученных как в<br />
одинаковых, так и в разных гидрофизических условиях, необход<strong>им</strong>а тщательная проработка схем<br />
экспер<strong>им</strong>ента, а также систематизация и накопление экспер<strong>им</strong>ентальных данных. Гидрофизические<br />
свойства полигона исследовались с помощью горизонтального зондирования морской среды сложными и<br />
тональными акустическ<strong>им</strong>и сигналами с различной частотой.<br />
В экспер<strong>им</strong>ентах 2009-2010 г.г. излучались тональные и сложные фазоманипулированные по М-<br />
последовательностям сигналы, прием осуществлялся гидрофонами поля РГБ. Заглубление гидрофонов на<br />
трассах в шельфовой зоне составляло 15 и 20 м. Излучение проводилось сигналами разной мощности<br />
излучателями, опускаемыми с <strong>Н</strong>ИС на якоре. Заглубление излучателей составляло 10, 20 и 30 м. В<br />
качестве задающего генератора использовался портативный компьютер.<br />
Расстановка буев производилась по разным схемам, так в 2009 году были реализованы постановки<br />
буев с различной геометрией, пр<strong>им</strong>ер одной такой схемы приведен на рис.1. Пре<strong>им</strong>уществом<br />
использования такой схемы является то что, такая расстановка РГБ позволяет проводить одновременные<br />
исследования сразу по нескольк<strong>им</strong> трассам, расположенными под разными углами от излучателя.<br />
Расположение гидрофонов на разных глубинах, в разных слоях океанической среды, дает возможность<br />
получить пространственные измерения, т.е. исследовать трехмерную модель акустического поля. Для<br />
сопоставления результатов и проведения численного моделирования в 2010 г. были вновь проведены<br />
измерения на трассе с хорошо изученной структурой дна с постоянной глубиной ~42м (рис.2).<br />
В 2009 году в качестве излучающих систем использовались<br />
1) Стационарно установленный на дне широкополосный излучатель, который излучал сигналы:<br />
− тон на частотах: f0=610, 1410, 2210, 3010, 3810, 4610, 5410 Гц;<br />
− М-последовательности f0= 2500 Гц<br />
2) Погружаемые излучатели, которые излучали сигналы:<br />
− тон на частотах f 0 = 610, 1410, 2210, 3010, 3810, 4610, 5410, 6210, 7010, 7810 Гц;<br />
193
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
− М-последовательности f 0 =2210, 3810, 7010 Гц.<br />
Сигнал подавался со звуковой карты портативного компьютера в виде звукового файла в формате wav<br />
с параметрами: f d = 22050 Гц; 16 бит, моно. Структура сигнала описана в работе [2].<br />
РГБ №12<br />
РГБ №34<br />
РГБ №35<br />
N42º33,750 E131º07,115<br />
N42º34,076 E131º05,461<br />
N42º32,691 E131º07,219<br />
1 N42°34,278' E131°08,017'<br />
2 N42°33,410' E131°06,223'<br />
Рис.1. Схема экспер<strong>им</strong>ента 24.10.2009 г<br />
Рис.2. Схема экспер<strong>им</strong>ента 24.07.2010 г.<br />
Результаты обработки полученных в 2010 г. данных показали, что для излучения достаточно будет<br />
выбрать три частоты излучения: 1110, 2010, 2910 Гц. Соответственно была изменена структура<br />
формирования сигнала. <strong>Н</strong>а рис.3 приведен пр<strong>им</strong>ер сигнала длительностью 1 мин 11 с, подававшегося со<br />
звуковой карты ноутбука в экспер<strong>им</strong>енте 24 июля 2010г. Параметры файла 20100724.wav f d = 22050 Гц; 16<br />
бит, моно.<br />
тон<br />
30 с<br />
1110 Гц<br />
5 с пауза<br />
утроенная<br />
sp 356 8 1110Гц<br />
5 с пауза<br />
тон<br />
30 с<br />
2010 Гц<br />
194<br />
5 с пауза<br />
утроенная<br />
5 с пауза<br />
тон<br />
30 с<br />
2910 Гц<br />
Рис.3. Структура излучаемого сигнала в экспер<strong>им</strong>енте 24.07. 2010 г.<br />
Излучение проводилось по 4 раза на каждом из горизонтов 30, 20 и 10 м через интервал 15 мин.<br />
Кроме того, в схеме был задействован активно-пассивный буй (№4 по схеме на рис.2), который<br />
излучал без стартового <strong>им</strong>пульса с периодом 1 мин 20 с три посылки (255*3) фазоманипулированного по<br />
М-последовательности sp456_8 со сложностью 8 периодов сигнала на 1 элемент на несущей частоте<br />
f 0 =7999 Гц.<br />
<strong>Н</strong>а береговом посту осуществлялся приём сигналов по радиоканалу радиоприёмниками ICOM R5.<br />
Отдельный канал параллельно с одн<strong>им</strong> из каналов ICOM R5 прин<strong>им</strong>ался радиоприёмником Р313.<br />
Регистрация сигналов производилась с помощью многоканальной платы АЦП L-780 на жёсткий диск<br />
компьютера.<br />
В ходе экспер<strong>им</strong>ентальных работ в 2010г. было проведено 6 постановок и выборок буев (включая<br />
постановки в целях калибровки), было записано более 200 реализаций принятых полем РГБ сигналов.<br />
При проведении экспер<strong>им</strong>ентов по распространению акустических сигналов проводились измерения<br />
гидрофизических характеристик среды, в том числе завис<strong>им</strong>ости скорости звука от глубины. <strong>Н</strong>а рис. 4<br />
приведены профили скорости звука, для близких по координатам точек эталонной трассы (рис.2),<br />
измеренных в начале августа 2009г. и в конце июля 2010г.<br />
Для обработки данных наряду с ранее разработанным математическ<strong>им</strong> обеспечением для проведения<br />
спектрального и корреляционного анализа использовались новые программы, позволяющие в реж<strong>им</strong>е<br />
5 с пауза<br />
утроенная<br />
5 с пауза
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
реального времени синхронно с регистрацией прин<strong>им</strong>аемой по радиоканалу информации<br />
визуализировать, получать статистические и спектральные характеристики. В результате спектральной<br />
обработки, проведенной по всем каналам с разрешением 1 Гц, были оценены уровни сигналов, принятых<br />
гидрофонами буев, установленных в разных точках трассы. Результаты обработки каждого из записанных<br />
файлов, содержащих реализации принятых по каждому каналу сигналов, заносились в таблицу в виде<br />
признаков (+ или –) выделенных макс<strong>им</strong>умов спектров на требуемой частоте, либо выраженных<br />
макс<strong>им</strong>умов вза<strong>им</strong>нокорреляционной функции с эталонным сигналом. Данные таблицы являются<br />
атрибутом базы данных экспер<strong>им</strong>ентов.<br />
C(z) 09 august 2009<br />
1470 1480 1490 1500 1510 1520 1530<br />
0<br />
C, m/c<br />
1470 1480 1490 1500 1510 1520 1530<br />
0<br />
5<br />
-5<br />
10<br />
-10<br />
15<br />
-15<br />
20<br />
25<br />
30<br />
35<br />
izl p1<br />
izl p4<br />
b01<br />
b04<br />
b34<br />
b10<br />
depth H, m<br />
-20<br />
-25<br />
-30<br />
-35<br />
point 1<br />
point 2<br />
point 3<br />
point 4<br />
point izl<br />
40<br />
-40<br />
45<br />
Рис. 4. Профили скорости звука в точках излучения и постановки РГБ в 9.08.2009г. и 24.07.2010г.<br />
Таблица 1. Сводная таблица обработки данных по одному из файлов данных<br />
Свертка<br />
Спектры<br />
изл. РГБ 610 1410 2210 3010 3810 4610 5410 2500(sp)<br />
356_8 №59<br />
12 ± + - + + + + + - ±<br />
59 - - - - - - - - - -<br />
03 ± + - + + + + + + +<br />
61 ± - - + + + + + + +<br />
04б + - - + + + + + + +<br />
Приведем результаты по каждому из этапов обработки одной из записей, полученных 15 сентября<br />
2009 г. <strong>Н</strong>а рис. 5 приведена временная развертка сигналов, принятых по трем каналам.<br />
РГБ<br />
12<br />
-45<br />
РГБ<br />
03<br />
РГБ<br />
4б<br />
Рис. 5. Временная развертка (0-225 с) трех каналов файла data_0013.dat, записанного 15 сентября 2009 с<br />
частотой дискретизации fd=39,8530 кГц<br />
<strong>Н</strong>а рис. 6 приведены результаты спектральной обработки тех же записей с пр<strong>им</strong>енением окна Ханна с<br />
50% перекрытием, размер БПФ 65536 точек. По каждому каналу были выявлены четкие макс<strong>им</strong>умы<br />
195
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
спектров, соответствующие излучаемым частотам. Анализ рассчитанных спектров позволил построить<br />
временные завис<strong>им</strong>ости уровня мощности принятых сигналов.<br />
12<br />
03<br />
04<br />
Рис. 6. Спектральная обработка трех каналов файла data_0013.dat<br />
При расчете временных задержек были рассчитаны свертки эталонных сигналов, сформированных в<br />
посылки для излучателя и сигналов для испытываемого активно-пассивного (АП) РГБ59. Приведенная на<br />
рис.7 свертка принятого от РГБ3 сигнала с излучаемой посылкой для эталона с М-последовательностью<br />
356_8 на несущей частоте 2500 Гц. Эталонный сигнал от АП РГБ59 при свертке дал хорошо выделенный<br />
пик, детализация позволяет выявить особенности приема такого сигнала.<br />
et_izl.dat<br />
(39853,)<br />
356_8, 2500<br />
et_59.dat<br />
(39853,<br />
456_8,<br />
7000,4)<br />
Рис. 7. Корреляционная обработка сигнала, принятого РГБ03<br />
Кроме основных измерений, для совершенствования метода был проведен сравнительный анализ<br />
эффективности исследований с помощью тональных и сложных фазоманипулированных сигналов;<br />
исследование по помехоустойчивости при использовании различных М-последовательностей и сигналов<br />
сформированных по эт<strong>им</strong> М-последовательностям с разной сложностью.<br />
Проведенные измерения с последующ<strong>им</strong> анализом позволили провести теоретическую и<br />
экспер<strong>им</strong>ентальную проверку эффективности пр<strong>им</strong>енения сложных фазоманипулированных сигналов<br />
уменьшенной длительности, отработать методику проведения экспер<strong>им</strong>ентов, провести проверку<br />
характеристик и калибровку аппаратурного комплекса.<br />
Особое вн<strong>им</strong>ание было уделено измерениям передаточной характеристики гидроакустических<br />
сигналов на эталонной трассе постоянной глубины с хорошо изученными параметрами дна. Было<br />
проведено испытание радиогидроакустических активно-пассивных буев нового типа (с датчиком<br />
глубины) и программного обеспечения для работы с так<strong>им</strong>и буями. Сравнение результатов обработки<br />
196
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
полученных данных с ранее полученными, а также с теоретически рассчитанными моделями позволяет<br />
определить направление будущих работ.<br />
Основной задачей исследований является получение качественных и количественных оценок<br />
воздействия динамических процессов, происходящих в морской среде, на амплитуды и времена<br />
запаздывания акустических сигналов. Имея статистически знач<strong>им</strong>ые результаты по изменениям<br />
параметров сигналов, прошедших исследуемые трассы, можно решить обратную задачу: найти<br />
характеристики процессов, вызывающих эти изменения. Так, для получения оценок параметров<br />
поверхностных волн проводились 30-минутные серии специальных измерений с циклическ<strong>им</strong> излучением<br />
эталонного сигнала на различных частотах. В дальнейшем планируется разработка методики определения<br />
скорости и направление течения.<br />
Л И Т Е Р А Т У Р А<br />
1 Громашева О.С., Захаров В.А., Кошелева А.В., Ли Б.Я., Юхновский В.А. Томографические исследования в шельфовой<br />
зоне Японского моря // Дальневосточные моря России. М.: <strong>Н</strong>аука, 2007. Кн. 4: Физические методы исследования. С.<br />
111-128.<br />
2 Громашева О.С., Бачинский К.В., Кошелева А.В., Ли Б.Я., Юхновский В.А. Исследование гидроакустических<br />
характеристик сигналов, принятых полем РГБ на трассах с постоянной глубиной// Сборник трудов XXII сессии РАО. Т.<br />
2.- М.: ГЕОС, 2010. С.410-414..<br />
УДК 534.232<br />
О.С. Громашева, К.В.Бачинский, А.В. Кошелева, В.А. Юхновский<br />
ВЫБОР ПАРАМЕТРОВ ИЗЛУЧЕ<strong>Н</strong>ИЯ АКУСТИЧЕСКИХ СИГ<strong>Н</strong>АЛОВ,<br />
ПРИ<strong>Н</strong>ЯТЫХ ПОЛЕМ РГБ<br />
Тихоокеанский океанологический <strong>институт</strong> <strong>им</strong>.В.И.Ильичева ДВО РА<strong>Н</strong><br />
Россия, 690041, Владивосток, ул. Балтийская , 43<br />
Тел.: (423-2) 311-400; Факс: (423-2) 312-573<br />
E-mail: gromasheva@poi.dvo.ru<br />
Дано теоретическое обоснование выбора параметров излучения: частоты и соответствующих мощностей для<br />
излучаемых при зондировании морской среды сложных фазоманипулированных по М-последовательностям сигналов. Для<br />
обеспечения достоверных измерений необход<strong>им</strong>о выбирать для используемых частот соответствующие мощности<br />
излучения. Полученные результаты были использованы при выборе параметров экспер<strong>им</strong>ентов, провод<strong>им</strong>ых на морском<br />
гидрофизическом полигоне «Мыс Шульца». Экспер<strong>им</strong>енты проводились в различных помеховых ситуациях, на трассах<br />
различной протяженности.<br />
При проведении экспер<strong>им</strong>ентальных работ на морском гидрофизическом полигоне ТОИ ДВО РА<strong>Н</strong><br />
МЭС «М.Шульца» в районе бухты Витязь проводятся измерения характеристик акустических сигналов,<br />
прошедших стационарные и квазистационарные трассы. В качестве зондирующих сигналов используются<br />
тональные и сложные фазоманипулированные по М-последовательностям сигналы в диапазоне частот от<br />
30 Гц до 9 кГц. При выборе параметров излучения возникает проблема выбора достаточной мощности<br />
сигнала для различных частот, обеспечивающих необход<strong>им</strong>ое соотношение сигнал/помеха. Излучение на<br />
разных частотах производилось с использованием широкополосных и резонансных излучателей.<br />
Экспер<strong>им</strong>енты проводились в различных помеховых ситуациях, связанных с погодными условиями, либо<br />
обусловленных техногенными причинами. Правильный выбор мощности излучения для используемых<br />
частот позволяет обеспечить достоверные измерения на трассах различной протяженности с разным<br />
уровнем помех.<br />
Пр<strong>им</strong>енение сложных фазоманипулированных сигналов дает возможность разделить модовую<br />
структуру, одновременно определить пространственные и частотно-временные характеристики морской<br />
среды. Прием сигналов осуществлялся полем радиогидроакустических буев с передачей информации по<br />
радиоканалу.<br />
Для обеспечения достаточной мощности в разной помеховой ситуации и на различных дистанциях<br />
при проведении горизонтального зондирования среды нужно знать выражение для отношения<br />
сигнал/помеха в завис<strong>им</strong>ости от частоты. Отношение сигнал/помеха определ<strong>им</strong> как отношение пикового<br />
значения интенсивности сигнала после его вза<strong>им</strong>но-корреляционной обработки с эталонным сигналом u(t)<br />
к дисперсии помехи [1]. Так как сигналы, пришедшие в точку приема по разным лучам, в результате<br />
обработки разделяются во времени, то будем рассматривать сигнал, пришедший по одному из лучей.<br />
Обознач<strong>им</strong> его P s<br />
s(t)<br />
, где s (t)<br />
– функция, описывающая циклически повторяющийся с периодом T<br />
фазоманипулированный зондирующий сигнал единичной амплитуды; P<br />
s<br />
– амплитуда сигнала в точке<br />
197
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
приема. Его функция вза<strong>им</strong>ной корреляции с эталонным сигналом u(t) записывается в виде<br />
∑ ∞ 2 ⎛ 2πk<br />
⎞<br />
Rs<br />
( t)<br />
= Ps<br />
T Ck<br />
exp⎜<br />
j t ⎟ .<br />
k=<br />
−∞ ⎝ T ⎠<br />
Тогда макс<strong>им</strong>альное значение R вза<strong>им</strong>но-корреляционной функции (ВКФ) R s<br />
(t)<br />
равно<br />
∑ ∞ 2<br />
Ck<br />
k= −∞<br />
s max<br />
2<br />
R<br />
s max<br />
= Ps<br />
T , а во временном представлении R<br />
s max<br />
= Ps<br />
∫ s ( t)<br />
dt .<br />
−T<br />
/ 2<br />
В предположении, что шумы моря, которые играют роль шумовой помехи, можно считать<br />
стационарными в широком смысле слова, выражение для дисперсии шумовой помехи<br />
∞<br />
2 1 2<br />
2<br />
σ n<br />
= G x<br />
( ω)<br />
G(<br />
ω)<br />
dω<br />
2π<br />
∫ , где σ<br />
n<br />
– дисперсия помехи после вза<strong>им</strong>но-корреляционной обработки; G<br />
x<br />
(ω)<br />
–<br />
−∞<br />
энергетический спектр (спектральная плотность) шумов моря.<br />
Если принять, что спектральная плотность G<br />
x<br />
(ω)<br />
равномерна в пределах полосы частот,<br />
зан<strong>им</strong>аемой спектром зондирующего сигнала, и равна G<br />
0<br />
/ 2 , где G<br />
0<br />
– значение односторонней<br />
спектральной плотности на несущей частоте зондирующего сигнала, тогда<br />
∞<br />
∞<br />
T / 2<br />
2 G0<br />
1<br />
2 G0<br />
2 G0<br />
2<br />
σ<br />
n<br />
= ∫ G(<br />
ω)<br />
dω<br />
= ∫ u ( t)<br />
dt = ∫ s ( t)<br />
dt . (1)<br />
2 2π<br />
2<br />
2<br />
−∞<br />
2 2 2 2 2<br />
Теперь для отношения сигнал/помеха можно записать q = Rs<br />
max<br />
/ σ<br />
n<br />
= 2Ps<br />
∫ s ( t)<br />
dt / G0<br />
.<br />
−T<br />
/ 2<br />
Так как сигнал s(t) <strong>им</strong>еет единичную амплитуду, в результате получаем следующее выражение для<br />
отношения сигнал/помеха<br />
2 2<br />
q = Ps<br />
T / G0<br />
. (2)<br />
Если вместо фазоманипулированного сигнала, промодулированного М–последовательностью,<br />
использовать в качестве зондирующего <strong>им</strong>пульса один элемент этого сигнала, можно получить высокую<br />
разрешающую способность по времени. Пр<strong>им</strong>ен<strong>им</strong> вза<strong>им</strong>но-корреляционную обработку принятого<br />
сигнала с прямоугольным <strong>им</strong>пульсом. Такой <strong>им</strong>пульс будет <strong>им</strong>еть единичную амплитуду с<br />
синусоидальным заполнением длительностью τ<br />
0<br />
= n0<br />
/ f0<br />
, где n<br />
0<br />
– число периодов несущей частоты f<br />
0<br />
,<br />
содержащееся в одном элементе фазоманипулированного сигнала. Форма ВКФ будет такая же, что и в<br />
случае фазоманипулированного сигнала.<br />
Так<strong>им</strong> же способом было получено отношение сигнал/помеха при излучении прямоугольного <strong>им</strong>пульса<br />
с синусоидальным заполнением<br />
2 2<br />
q = P1<br />
sτ<br />
0<br />
/ G0<br />
, (3)<br />
где P 1 s<br />
– амплитуды сигнала, пришедшего в точку приема по рассматриваемому лучу.<br />
Из выражений (2) и (3) следует, что для того, чтобы после опт<strong>им</strong>альной обработки принятого сигнала<br />
обеспечивалось одинаковое отношение сигнал/помеха при использовании фазоманипулированных и<br />
2 2<br />
прямоугольных зондирующих <strong>им</strong>пульсов, должно выполняться следующее соотношение P<br />
s<br />
T = P1<br />
s<br />
τ<br />
0<br />
.<br />
Амплитуды приходящих сигналов P<br />
s<br />
и P 1 s<br />
пропорциональны давлениям, создаваемым вблизи<br />
2<br />
2<br />
источника звука (напр<strong>им</strong>ер, на расстоянии 1 м), квадраты амплитуд P<br />
s<br />
и P<br />
1s<br />
пропорциональны<br />
2<br />
2<br />
акустической мощности источника, а величины P s<br />
T и P<br />
1 s<br />
τ<br />
0<br />
– энергии акустического излучения. Тогда<br />
энергия, приходящаяся на один цикл излучения, для обеспечения одинакового отношения сигнал/помеха<br />
2 2<br />
n<br />
должна быть одинакова, а акустические мощности должны отличаться в P1 s<br />
/ Ps<br />
= T / τ<br />
0<br />
= N = 2 −1<br />
раз, где<br />
N – число элементов в одном периоде фазоманипулированного зондирующего сигнала. Если<br />
фазоманипулированный сигнал формируется десятикаскадным регистром сдвига, то n=10 и N=1023. Это<br />
означает, что для получения отношения сигнал/помеха, которое наблюдается при использовании<br />
фазоманипулированного сигнала, в случае излучения прямоугольного <strong>им</strong>пульса потребуется мощность в<br />
1023 раза большая.<br />
Фазоманипулированные сигналы, реализуя высокую разрешающую способность по времени при малой<br />
мощности излучения, позволяют также <strong>им</strong>еть одновременно достаточно высокую разрешающую<br />
способность по частоте, которая определяется периодом T и, следовательно, числом элементов N в М-<br />
последовательности, модулирующей по фазе зондирующий сигнал. У прямоугольного <strong>им</strong>пульса с<br />
198<br />
−∞<br />
T / 2<br />
−T<br />
/ 2<br />
T / 2
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
синусоидальным заполнением длительностью τ<br />
0<br />
разрешение по частоте будет (по порядку величин) в N<br />
раз меньше.<br />
Было получено выражение для отношения сигнал/помеха (2) в виде функции от частоты заполнения f<br />
0<br />
зондирующего сигнала<br />
2<br />
2 Wa ρcF( R)<br />
T 2,16 −(6<br />
+ 0,0036 f0<br />
3 / R)<br />
q =<br />
f<br />
2<br />
0<br />
10<br />
, (4)<br />
2πR<br />
A(<br />
u)<br />
где R – расстояние;<br />
W<br />
a<br />
– мощность акустического излучения источника звука;<br />
F (R) – фактор фокусировки для луча, по которому распространяется сигнал;<br />
f 0 – несущая частота сигнала в кГц;<br />
A (u) – коэффициенты, зависящие от скорости ветра u.<br />
3 / 2<br />
0,0018 f0<br />
R<br />
Уменьшение амплитуды сигнала вследствие затухания учитывалось коэффициентом 10 − .<br />
Оценки параметров A (u)<br />
были получены аппрокс<strong>им</strong>ацией завис<strong>им</strong>остей спектрального уровня шумов<br />
моря от частоты для скоростей ветра 2,5; 5; 7,5; 10 м/с в диапазоне частот 2–10 кГц.<br />
Так<strong>им</strong> образом, обеспечение необход<strong>им</strong>ого соотношения сигнал/помеха позволяют уменьшить<br />
мощность зондирующего сигнала в N–1 раз по отношению к <strong>им</strong>пульсным сигналам, обеспечивающ<strong>им</strong> ту<br />
же необход<strong>им</strong>ую точность определения времени прихода сигналов.<br />
Для решения задачи выбора частоты заполнения сигнала было найдено выражение для опт<strong>им</strong>альной<br />
частоты заполнения сигнала<br />
2/3<br />
f opt<br />
= 31,13/<br />
R<br />
(5)<br />
Рассчитанные значения опт<strong>им</strong>альных частот в завис<strong>им</strong>ости от протяженности трасс распространения<br />
звука приведены в таблице 1.<br />
Таблица 1. Значения опт<strong>им</strong>альных частот в завис<strong>им</strong>ости от протяженности трасс<br />
R, км 2 4 6 8 12<br />
W/Wopt<br />
10<br />
W<br />
10 0<br />
10 -1<br />
10 -2<br />
q=10<br />
q=20<br />
10 -3<br />
q=30<br />
q=40<br />
q=50<br />
10 -4<br />
2 3 4 5 6 7 8 9 10 11 R, km<br />
8<br />
6<br />
4<br />
2<br />
f opt , кГц 19,61 12,35 9,43 7,78 5,94<br />
Рис.1. Завис<strong>им</strong>ость мощности<br />
акустического излучения от расстояния<br />
для различных значений отношения<br />
сигнал/помеха q<br />
0<br />
0 0.5 1 1.5 2<br />
alpha<br />
Рис. 2. Завис<strong>им</strong>ость отношения мощностей к<br />
параметру α = f / f .<br />
0<br />
opt<br />
Мощность акустического излучения W<br />
a0<br />
,<br />
обеспечивающая заданное превышение сигнала над<br />
уровнем помех на опт<strong>им</strong>альной частоте, определяется<br />
соотношением<br />
3,44 2<br />
3 A(<br />
u)<br />
R q<br />
W a 0<br />
= 15,8 ⋅10<br />
. (6)<br />
ρcF(<br />
R)<br />
T<br />
Для получения оценок мощности акустического<br />
излучения для различных значений q и R было<br />
выполнено моделирование, причем среди прочих<br />
вариантов были рассмотрены условия, когда<br />
наблюдалось значительное волнение (состояние<br />
поверхности моря около 5 баллов). Для решения были<br />
приняты ρ = 1000 кг/м 3 , c =1500 м/с, F(R)=1, T=1 с.<br />
Скорость ветра выбиралась для случая сильного ветра<br />
−6<br />
u=10 м/с ( A ( u)<br />
= A(10)<br />
= 12 ⋅10<br />
) . В результате была<br />
построена завис<strong>им</strong>ость мощности акустического<br />
излучения (в ваттах) от расстояния (в км) для различных<br />
значений отношения сигнал/помеха (рис. 1).<br />
Требуемая мощность излучения обратно<br />
пропорциональна фактору фокусировки F(R) и периоду<br />
T циклического излучения зондирующего сигнала, что<br />
позволяет легко найти мощность излучения для любых<br />
значений величин F(R) и T.<br />
Было проанализировано влияние отклонения<br />
несущей частоты f<br />
0<br />
от опт<strong>им</strong>ального значения f на<br />
199<br />
opt
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
величину требуемой мощности излучения. В результате моделирования построена завис<strong>им</strong>ость<br />
W<br />
2<br />
a 1 0,625( α<br />
3 / −1)<br />
= 10<br />
2,16<br />
Wa0<br />
α<br />
отношения мощностей W a /W a0 , обеспечивающих на этих частотах при прочих равных условиях одинаковое<br />
отношение сигнал/помеха, от отношения несущей частоты к ее опт<strong>им</strong>альному значению α = f<br />
0<br />
/ fopt<br />
(рис.2).<br />
Можно сделать вывод, что использование в<br />
экспер<strong>им</strong>ентальных исследованиях зондирующих сигналов в<br />
диапазоне опт<strong>им</strong>альных частот и близких к опт<strong>им</strong>альным<br />
позволяет уменьшать требуемую мощность.<br />
При планировании экспер<strong>им</strong>ентальных работ отряда<br />
акустической томографии в береговой экспедиции на МЭС<br />
«Мыс Шульца» в 2009 - 2010 г.г. для выбора параметров<br />
излучаемых сигналов были использованы теоретически<br />
полученные соотношения. Основные экспер<strong>им</strong>ентальные<br />
исследования проводились по различным трассам. В данной<br />
работе рассмотр<strong>им</strong> одну из них, протяженность которой<br />
составила 15 км. [2].<br />
Зондирование морской среды осуществлялось тональными<br />
и сложными фазоманипулированными М-<br />
Рис.3. Спектры сигналов, принятых последовательностями сигналами, прин<strong>им</strong>аемыми<br />
РГБ№1 и РГБ№2<br />
гидрофонами радиогидроакустических буев. Заглубление<br />
гидрофонов составляло 20 м, буи устанавливались на<br />
расстоянии 2,5…5 км друг от друга по трассе с изменяющейся глубиной от 60 до 32 м.<br />
В экспер<strong>им</strong>енте был задействован широкополосный излучатель с полосой от 20 до 8000 Гц, который<br />
опускался на глубину 15 м. В качестве задающего генератора использовался портативный компьютер, на<br />
котором в одном файле были представлены все реж<strong>им</strong>ы излучения для одного погружения излучателя. В<br />
2010 году излучение проводилось на частотах 1110, 2010, 2910 Гц. Эти частоты достаточно хорошо видны<br />
на спектрах (рис.3) сигналов, принятых гидрофонами РГБ№1 и РГБ№2, установленных на расстояниях 15<br />
и 5 км от излучателя.<br />
Сигнал формировался из следующих друг за другом посылок:<br />
1) 30 с – тон с f 0 =1110, пауза длительностью 5с;<br />
2) утроенная посылка сигнала, фазоманипулированного на основе М-последовательности sp356_8. Данная<br />
последовательность формируется 8-разрядным сдвиговым регистром с суммированием 3, 5, 6 и 8 отводов;<br />
одному элементу последовательности соответствует 8 периодов тона несущей частоты f 0 =1110 Гц, пауза<br />
длительностью 5с;<br />
3) 30 с – тон с f 0 =2010, пауза длительностью 5с;<br />
4) утроенная посылка М-последовательности 356_8 f 0 =2010 Гц, пауза длительностью 5с;<br />
5) 30 с – тон с f 0 =2910, пауза длительностью 5с;<br />
6) утроенная посылка М-последовательности 356_8 с f 0 =2910 Гц.<br />
Результаты корреляционной обработки принятых сложных фазоманипулированных сигналов,<br />
излучаемых на частотах<br />
1110 Гц 2010 Гц 2910 Гц<br />
РГБ<br />
№2<br />
РГБ<br />
№1<br />
Рис.4. Вза<strong>им</strong>нокорреляционные функции эталонных и принятых сигналов для РГБ№1 и РГБ№2<br />
200
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
1110 Гц, 2010 Гц и 2910 Гц, позволившие оценить времена прихода сигналов на гидрофоны РГБ№1 (R=15<br />
км) и РГБ№2 (R=5 км), приведены на рис. 4.<br />
Анализ результатов обработки показал, что все корреляционные макс<strong>им</strong>умы хорошо разрешаются. Это<br />
позволило определить время прихода сигналов ко всем гидрофонам РГБ. Уровень корреляционного шума,<br />
определяемый присутствием тонального сигнала, повышается с расстоянием на частоте 1110 Гц. Частота<br />
2010 Гц является менее чувствительной для шума тонального сигнала при корреляционной обработке. Для<br />
расстояний порядка 15 км для РГБ №1 наиболее близкой к опт<strong>им</strong>альной является частота 2910 Гц. Для буя<br />
№2 при расстоянии 5 км сигнал достаточно хорошо обнаруживается на всех частотах.<br />
Проблема выбора параметров излучения является актуальной при планировании экспер<strong>им</strong>ентов. К<br />
сожалению, технически не всегда удается реализовать излучение с опт<strong>им</strong>альной частотой и мощностью,<br />
однако, используя полученные соотношения, можно оценить допуст<strong>им</strong>ые погрешности экспер<strong>им</strong>ента.<br />
Л И Т Е Р А Т У Р А<br />
1. О.С.Громашева, В.А.Юхновский О выборе частоты и мощности излучаемых сигналов, фазоманипулированных по М-<br />
последовательностям Электронный журнал «Техническая акустика» 2010,10.<br />
2. Громашева О. С., Бачинский К. В., Кошелева А. В., Ли Б. Я., Юхновский В. А. Экспер<strong>им</strong>ентальные исследования<br />
звукового канала в шельфовой зоне Японского моря с пр<strong>им</strong>енением поля дрейфующих буев // 3-я Всероссийская<br />
научно-техническая конференция «Технические проблемы освоения Мирового океана». Владивосток, 22-25 сентября<br />
2009 г., с. 267–272.<br />
УДК 551.463.26<br />
В.Г.Евдок<strong>им</strong>ов, В.Б.Железный, Э.В.Соловьева<br />
ОЦЕ<strong>Н</strong>КА ВЛИЯ<strong>Н</strong>ИЯ ГОРИЗО<strong>Н</strong>ТАЛЬ<strong>Н</strong>ОЙ И ВЕРТИКАЛЬ<strong>Н</strong>ОЙ АПЕРТУР А<strong>Н</strong>ТЕ<strong>Н</strong><strong>Н</strong>Ы<br />
<strong>Н</strong>А ПОДАВЛЕ<strong>Н</strong>ИЕ РЕВЕРБЕРАЦИО<strong>Н</strong><strong>Н</strong>ОЙ ПОМЕХИ ПРИ ГИДРОЛОКАЦИИ<br />
В ГЛУБОКОМ МОРЕ<br />
ОАО "Концерн "Океанприбор"<br />
Россия, 197376, Санкт-Петербург, Чкаловский пр. 46<br />
Тел.: (7-812)-499-74-03; Факс: (7-812)-320-80-52<br />
E-mail: mfp @ mail.wplus.net<br />
В настоящее время в гидролокаторах стали пр<strong>им</strong>еняться слабонаправленные излучатели с ненаправленными в<br />
вертикальной плоскости приемными линейными антеннами. При их использовании формально должно проявиться сильное<br />
влияние реверберационной помехи. Для оценки влияния реверберационной помехи на параметры гидролокаторов было<br />
проведено численное моделирование параметров обнаружения эхосигналов при различных вариациях апертур приемных<br />
антенн в глубоком море. В ходе моделирования было установлено, что подавление реверберационной помехи в основном<br />
обеспечивается горизонтальной апертурой антенны и в меньшей степени вертикальной. Такой факт физически<br />
объясняется тем, что при дальней гидролокации энергетические потери лучей, идущих вне канала распространения, много<br />
больше, чем потери лучей, распространяющихся в подводном звуковом канале.<br />
В 70-80-х годах ХХ века в Акустическом <strong>институт</strong>е <strong>им</strong>. акад. <strong>Н</strong>.<strong>Н</strong>.<strong>Андреева</strong> (АКИ<strong>Н</strong>) активно<br />
разрабатывалось направление по теоретическому описанию звуковых полей в океане, в ходе которых<br />
В.Ю.Завадск<strong>им</strong>, В.В.Бородиным, В.П.Тебякиным, В.П.Коданевым, А.В.Вагиным и др. был получен целый<br />
класс вычислительных программ для расчета параметров распространения звука с учетом влияния<br />
гидрологических факторов [1]. Указанные работы [2], позволили приступить к созданию программы<br />
расчета параметров обнаружения эхосигналов на фоне энергетических шумов и реверберационной<br />
помехи, которая проводилась в 1985-1991 г.г. так же в АКИ<strong>Н</strong> (разработчик компьютерной программы и<br />
численной модели реверберационной помехи – В.<strong>Н</strong>.Гончаров, ядра описания лучевого распространения<br />
звука [2] – В.П.Тебякин, общее методическое руководство – В.В.Бородин), а тестирование и выявление<br />
ошибок программного продукта проводилось в Ц<strong>Н</strong>ИИ «Морфизприбор» (тест-драйв В.Б.Железный). В<br />
ходе тест-драйва проводилась и верификация программы по доступным экспер<strong>им</strong>ентальным данным и на<br />
базе формирования виртуальных вырожденных условий, приводящих к заранее известным результатам.<br />
При этом пр<strong>им</strong>енение вырожденных условий (напр<strong>им</strong>ер, пошаговое изменение какого-либо<br />
океанографического параметра в широких пределах) позволяло проверять правильность реакции<br />
вычислений на изменение условий. В 1990 г. был завершен первый приемлемый вариант программы<br />
расчета параметров обнаружения эхосигналов, предназначенный для работы в операционной системе MS-<br />
DOS. Указанная программа в 1991-1992 г.г. была принята в качестве базовой для расчета эхосигналов.<br />
Дополнительно в 1993-1994 г.г. В.<strong>Н</strong>.Гончаровым программа была переработана и улучшена (без<br />
составления текстового описания в силу прекращения работ в указанном направлении в 1993 г.) по<br />
замечаниям и предложениям, сформированным в ходе тест-драйва программного продукта. Улучшенная<br />
201
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
программа в силу указанных причин не получила распространения и оказалась доступна небольшому<br />
числу специалистов, получивших информацию о ее использовании непосредственно у разработчика.<br />
Уже в ходе проведения тест-драйва 1987-1993 г.г. было высказано<br />
предположение о влиянии дополнительных физических факторов на<br />
параметры реверберации в отдельных ситуациях. Проверка программного<br />
продукта не выявила ошибок, а тестирование по доступным<br />
экспер<strong>им</strong>ентальным данным в целом подтверждала адекватность<br />
программного продукта. <strong>Н</strong>о поскольку в тот период основные<br />
направления снижения реверберационной помехи в гидролокации<br />
базировались на пр<strong>им</strong>енении широкополосных сигналов и<br />
узконаправленных параметрических излучающих антенн, исследование<br />
Рис.1ВРСЗ<br />
отмеченных в ходе моделирования особенностей не представлялось тогда<br />
актуальным.<br />
<strong>Н</strong>еобход<strong>им</strong>ость исследования ранее высказанного предположения<br />
о существовании дополнительных факторов устойчивости к реверберационной помехе возникла только в<br />
результате появления (в Англии, США, Франции) гидролокаторов с практически ненаправленными<br />
буксируемыми излучателями и приемными линейными антеннами. Исходя из ранее сформированных<br />
взглядов на построение гидролокаторов [3], ненаправленное (слабонаправленное) излучение на низких<br />
частотах и прием на линейную антенну, не <strong>им</strong>еющую направленности в вертикальной плоскости, должен<br />
приводить к снижению устойчивости таких гидролокаторов к реверберационной помехе. А если его<br />
(снижения устойчивости к реверберационной помехе) не наблюдается, то не ясно за счет каких факторов<br />
(кроме известного пр<strong>им</strong>енения сложных сигналов и повышения концентрации в горизонтальной<br />
плоскости), обеспечивается устойчивость к реверберации гидролокаторов с линейными буксируемыми<br />
антеннами.<br />
Для выявления дополнительных факторов снижения влияния реверберационной помехи при<br />
использовании в приеме линейных антенн (хотя бы для отдельных гидрологических ситуаций) было<br />
проведено численное моделирование работы виртуального гидролокатора с горизонтальной линейной<br />
антенной в глубоком море с гидрологией летного типа с выраженными зонами конвергенции.<br />
В качестве виртуальной модели гидролокатора с линейной приемной антенной была выбрана<br />
система с ненаправленным в вертикальной плоскости излучателем с вертикальной апертурой h и =0,35 м,<br />
горизонтальной апертурой l и =3 м, излучающ<strong>им</strong> тонально-<strong>им</strong>пульсные сигналы длительностью 1 сек на<br />
частоте f=1000 Гц, полосой менее 2 Гц, с акустической мощностью 2000 Вт и с приемной линейной<br />
антенной с горизонтальной апертурой l п =500 м, при вертикальной апертуре h п =0,2 (мин<strong>им</strong>альное<br />
эффективное значение h п определялось по приравниванию коэффициентов концентрации линейной и<br />
плоской антенн при одинаковом значении горизонтальной апертуры этих антенн). В ходе моделирования<br />
указанная гидролокационная система сравнивалась с системами, <strong>им</strong>еющ<strong>им</strong>и параметры вертикальной<br />
апертуры h п =2 м; 5 м; 10 м при сохранении значения горизонтальной апертуры и параметров излучения. В<br />
качестве критерия сравнения завис<strong>им</strong>ости влияния реверберационной помехи от размеров вертикальной<br />
апертуры выбирались значения вероятности правильного обнаружения Р по эхосигнала от неподвижной<br />
цели, связанные через вероятность ложных тревог Р лт со значениями отношения сигнал/помеха на выходе<br />
приемного тракта [3,4]. Значение вероятности ложных тревог выбиралось одинаковым Р лт =0.001 для всех<br />
рассматриваемых случаев. Эквивалентный радиус цели выбирался равным 20 м из условия достижения<br />
при использовании апертуры 500×10м значений Р по в зоне конвергенции в пределах от 0,9 до 1 для<br />
обеспечения удобства рассмотрения динамики изменения Р по при снижении вертикальной апертуры.<br />
Параметры среды выбирались: коэффициент обратного рассеяния от дна -28 дБ, с темпом роста от<br />
угла скольжения 0,35 дБ/град; коэффициент обратного рассеяния от поверхности -48 дБ, с темпом роста<br />
от угла скольжения 0,53 дБ/град; значение средне-квадратичной высоты волнения моря 0,35 м;<br />
коэффициент обратного объемного рассеяния 10 -6 1/м для слоя, расположенного на глубине от 10 до 210м.<br />
Глубина моря выбиралась равной 4 км, параметры поглощения звука в взяты в соответствии с [3].<br />
Вертикальное распределения скорости звука (ВРСЗ) соответствовало одному из часто встречающихся<br />
вариантов летнего типа в глубоком море (рис.1). Данный тип ВСРЗ был выбран в связи с тем, что в<br />
указанных условиях гарантированно наблюдается формирование зон конвергенции акустических лучей<br />
[3]. В целом выбранные значения параметров обратного рассеяния по [3] и излучаемых сигналов по<br />
полосе, длительности и частоте должны способствовать повышению уровня реверберационной помехи.<br />
Моделирование проводилось для двух глубин размещения приемно-излучающей системы – 95 м и 195 м,<br />
202
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
при четырех горизонтах размещения лоцируемых объектов по глубине: 55, 105, 155 и 205 м, на<br />
дистанциях, охватывающих первую зону конвергенции.<br />
Для выявления влияния реверберационной помехи на значения Р по при численном моделировании<br />
был пр<strong>им</strong>енен метод вырождения энергетической помехи шумов моря путем виртуального снижения ее<br />
интенсивности, указанной в [3], в 10 6 -10 12 раз. Это позволило для выбранных дистанций и условий<br />
обеспечить отсутствие влияния энергетических шумов на значения Р по и отношения сигнал-помеха.<br />
Полученные результаты распределения вероятности правильного обнаружения Р по эхосигналов<br />
представлены на рис. 2 в завис<strong>им</strong>ости от изменения вертикальной апертуры приемной антенны (на рис.2<br />
значения апертур даны: а – 0,2 м, б – 2 м, в – 5 м, г – 10 м) для различных условий расположения по<br />
глубинам приемо-излучающих антенн (<strong>Н</strong> И – 95 и 195 м) и лоцируемых объектов (<strong>Н</strong> Ц – 55, 105, 155, 205 м).<br />
Рис.2 Распределение вероятности правильного обнаружения Р по в завис<strong>им</strong>ости от изменения<br />
вертикальной апертуры приемной антенны: а – 0,2м, б – 2 м, в – 5 м, г – 10 м; для различного<br />
расположения по глубине целей (<strong>Н</strong> ц ) и приемо-излучающих антенн (<strong>Н</strong> и )<br />
203
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Из полученных результатов следует (рис. 2), что в выбранном типе гидрологии в первой зоне<br />
конвергенции акустических лучей при изменении вертикальной апертуры приемной антенны в 50 раз, а<br />
ширины основного лепестка диаграммы направленности с 360 до 8-9 градусов значения Р по и,<br />
следовательно, отношение сигнал – реверберационная помеха, практически не изменяются. <strong>Н</strong>ебольшие<br />
изменения Р по с 0,8 до 0,57-0,6 при уменьшении вертикальной апертуры с 10 м до 0,2 м, отмечаются<br />
только после выхода лучей из зоны конвергенции (41-62 км) только в полосе распада (63-68 км) зоны<br />
конвергенции, проявляющейся для случаев большого заглубления приемно-излучающего гидролокатора<br />
(195 м) и горизонта цели ниже 150 м.<br />
Причины выявленного отсутствия влияния изменения вертикальной апертуры с 0,2 до 10 м на<br />
вероятность правильного обнаружения Р по эхосигналов могут заключаться в существовании в данном типе<br />
гидрологии эффекта подавления вертикальных компонент реверберационной помехи, эквивалентного<br />
подавлению реверберационной помехи за счет увеличения вертикальной апертуры. В данном типе<br />
гидрологии отмеченное подавление реализуется за счет энергетического ослабления лучей, излучаемых и<br />
приходящих выше или ниже 6…8 град в силу их повышенной дивергенции, мультипликативного<br />
ослабления лучей, отражающихся от дна и морской поверхности, и появления лучей, которые в период<br />
формирования эхоконтактов, будут проходить зоны (на глубинах 500-3500 км) с низк<strong>им</strong> обратным<br />
рассеиванием из-за их расхождения по времени в силу увеличения пути донно-поверхностных лучей<br />
относительно водных лучей.<br />
Указанные факторы наглядно, подтверждаются лучевой структурой акустического поля,<br />
представленной на рис. 3 (исходный угловой раскрыв между линиями 2 градуса). Из представленной на<br />
рис. 3 лучевой структуры поля следует, что по сравнению с водными лучами (-6, +6 град для <strong>Н</strong> И =95м и -7,<br />
+7 град для <strong>Н</strong> И =195м, рис.3а) донно-поверхностные лучи (рис. 3б,в) ослабляются в секторах свыше 10<br />
градусов вверх и вниз в силу визуально заметной дивергенции, а в секторах свыше 14 градусов вверх и<br />
вниз потери еще дополнительно возрастают из-за контактов с дном и поверхностью (рис. 3б,в). Так<strong>им</strong><br />
образом, сужение ширины главного макс<strong>им</strong>ума характеристики направленности по вертикали до 8-10 град<br />
за счет увеличения апертуры по вертикали до 10 м в данном типе гидрологии не дает заметного выигрыша<br />
по реверберационной помехе.<br />
Для сравнения было проведено сопоставление (рис. 4) вероятности правильного обнаружения Р ПО<br />
для приемных антенн с горизонтальной апертурой 125 м и 500 м при одинаковой вертикальной апертуре<br />
в 10 м. Глубины размещения гидролокатора <strong>Н</strong> И =95 м и <strong>Н</strong> И =195 м, и горизонтах цели: 55, 105, 155, 205 м.<br />
Рис. 3 Лучевая структура, глубина источников – 95 м (слева) и 195 м (справа), а – водные<br />
лучи, б, в – донно-поверхностные лучи, направленные вниз (б) и вверх (в).<br />
Указанное сопоставление, наглядно демонстрирует, ожидаемый результат снижения Р по при снижении<br />
горизонтального апертуры в 4 раза.<br />
204
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Полученные результаты моделирования позволяют сделать выводы о наличии гидрологических<br />
условий, в которых подавление реверберационной помехи в основном обеспечивается увеличением<br />
горизонтальной апертуры приемной антенны и, в заметно меньшей степени, вертикальной апертурой. В<br />
частности, как показало данное моделирование, эффект подавления вертикальных компонент<br />
реверберационной помехи, эквивалентный снижению уровня реверберационной помехи за счет<br />
увеличения вертикальной апертуры приемной антенны, реализуется в глубоком море с ВРСЗ летнего типа.<br />
Следует отметить, что наличие аналогичного эффекта или его отсутствие в других<br />
гидрологических условиях может быть установлено аналогично проведенному моделированию.<br />
Рис .4 Сопоставление вероятности правильного обнаружения Р ПО для приемных антенн с<br />
длинной по горизонтали – 125 м (серий цвет) и 500 м (черный цвет) при размере по вертикали 10<br />
м. <strong>Н</strong> И =95 м (слева) и <strong>Н</strong> Ц =195 м (справа), глубины цели: а – 55м, б- 105 м, в-155 м и г-205 м.<br />
Л И Т Е Р А Т У Р А<br />
1. Дубровский <strong>Н</strong>.А., Мазепов В.И Развитие исследований по гидроакустике в Акустическом <strong>институт</strong>е <strong>им</strong>ени <strong>академика</strong><br />
<strong>Н</strong>.<strong>Н</strong>.<strong>Андреева</strong> // В сб. Из истории отечественной гидроакустики – СПб.: Ц<strong>Н</strong>ИИ <strong>им</strong>. акад. А.<strong>Н</strong>.Крылова, 1998. – С.86–<br />
113.<br />
2. Тебякин В.П. и др. Raymod52 – базовый комплекс программ для вычисления звуковых полей в слоисто-неоднородном<br />
океане лучевым методом // Отчет АКИ<strong>Н</strong>. М., 1990.<br />
3. Урик Р.Дж. Основы гидроакустики – Л.: Судостроение, 1978.<br />
4. Колчеданцев А.С. Гидроакустические станции – Л.: Судостроение, 1982.<br />
УДК 534.61+519.25<br />
А.С.Иваненков, П.И.Коротин, Д.А.Орлов, А.А.Родионов, В.И.Турчин<br />
ИСПОЛЬЗОВА<strong>Н</strong>ИЕ ПАССИВ<strong>Н</strong>ОГО АПЕРТУР<strong>Н</strong>ОГО СИ<strong>Н</strong>ТЕЗА ДЛЯ ОПРЕДЕЛЕ<strong>Н</strong>ИЯ<br />
КООРДИ<strong>Н</strong>АТ ТО<strong>Н</strong>АЛЬ<strong>Н</strong>ЫХ ИСТОЧ<strong>Н</strong>ИКОВ<br />
Институт прикладной физики РА<strong>Н</strong><br />
Россия, 603950 <strong>Н</strong>ижний <strong>Н</strong>овгород, ул. Ульянова, д.46<br />
Тел.: (831) 416-47-74; Факс: (831) 436-59-76<br />
E-mail: turchin@hydro.appl.sci-nnov.ru<br />
Рассмотрены возможности определения координат тональных источников подводного звука с использованием<br />
движущихся приемных антенных решеток (АР). Исследованы различные сценарии, различающиеся формой траектории<br />
(прямолинейная или круговая) и набором неизвестных параметров, который в общем случае может включать частоту и<br />
пеленг источника, дальность до источника, а также скорость его движения.<br />
Задача пассивного апертурного синтеза, т.е. определение положения источника звука с помощью<br />
движущейся приемной системы, была детально исследована теоретически и экспер<strong>им</strong>ентально. В<br />
целом, пассивный апертурный синтез менее информативен, чем активный (когда определение<br />
координат источника производится с использованием лоцирующего сигнала), поскольку сигнал от<br />
источника обычно неизвестен. В частности, использование единственного гидрофона не позволяет<br />
однозначно определить частоту и пеленг плоской волны [1]. Тем не менее, было разработано несколько<br />
методов пассивного апертурного синтеза, таких как ETAM (extended towed array measurements) [2],<br />
макс<strong>им</strong>ально правдоподобный оцениватель [3], когерентное суммирование по диаграммам субапертур<br />
[4] и некоторые другие. <strong>Н</strong>есколько работ, таких, как [5,6], были посвящены исследованию<br />
эффективности развитых методов; в частности, была определена граница Крамера-Рао оценки пеленга<br />
для различных сценариев апертурного синтеза. Проведенные исследования, однако, ограничивались<br />
лишь случаем прямолинейного движения приемной системы. Кроме того, не рассматривалась ситуация,<br />
205
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
когда источник находится на конечном расстоянии от<br />
приемной системы, и одновременно с пеленгом должна<br />
оцениваться дистанция. В настоящей работе<br />
предпринята попытка восполнить этот пробел.<br />
1. Постановка задачи. Будем рассматривать<br />
задачу оценки координат тонального источника с<br />
неизвестной частотой по сигналам, прин<strong>им</strong>аемым<br />
движущейся N-элементной линейной АР длиной D. В<br />
общем случае источник также может двигаться, и<br />
тогда, напр<strong>им</strong>ер, при его равномерном и<br />
прямолинейном движении должны оцениваться еще и<br />
две проекции вектора его скорости U (см. рис. 1).<br />
Замет<strong>им</strong>, что при известной частоте и неподвижном<br />
источнике задача оценки его координат, напр<strong>им</strong>ер, в<br />
случае равномерного прямолинейного движения может<br />
быть однозначно решена с помощью одиночного<br />
приемного элемента [1]. В случае неизвестной<br />
частоты, как будет показано ниже, ситуация<br />
оказывается принципиально иной. Модель сигнала,<br />
прин<strong>им</strong>аемого элементами АР, запишем в виде<br />
z<br />
j<br />
= Aµ j( θ1) + ξ<br />
j, j = 1K J ,<br />
(1)<br />
где z<br />
j<br />
– временная последовательность N × 1 векторов<br />
– отсчеты сигналов на выходах элементов АР, j –<br />
номер временного отсчета, A – неизвестная комплексная амплитуда сигнала источника,<br />
шум,<br />
⎧<br />
ρ<br />
⎫<br />
n,<br />
j<br />
2 2<br />
µ<br />
j<br />
= exp 2πif<br />
⎨t<br />
j<br />
− ⎬ ,<br />
n, j ( R Uxtj rn, x<br />
tj ) R Uytj rn,<br />
y<br />
tj<br />
⎩ c ⎭ n=<br />
1, N<br />
ξ<br />
j<br />
– фоновый<br />
( ( ) ) 12<br />
ρ = sin ψ+ − ( ) + cos ψ+ − ( ) , (2)<br />
tj<br />
∈− [ T /2, T /2] – момент времени, соответствующий отсчету с номером j, f – частота сигнала от<br />
источника, ψ , R – пеленг и расстояние до источника в момент t = 0 , Ux,<br />
U<br />
y<br />
– проекции скорости<br />
источника в декартовой системе координат ( x, y ) – см. рис. 1, rnx ,<br />
( tj), rny ,<br />
( t<br />
j)<br />
– декартовы координаты x<br />
и y, соответственно, n-го приемного элемента, c – скорость звука. Вектор θ<br />
1<br />
обозначает параметры,<br />
считающиеся неизвестными. Их полный набор может быть представлен как θ<br />
1<br />
= ( f , ψ, RU ,<br />
x<br />
, Uy<br />
). В<br />
модели (2) мы пренебрегаем изменением амплитуды сигнала при движении, полагая, что источник<br />
2 2<br />
находится на достаточном удалении, и игнорируем поправки к фазе (2) порядка U c , связанные с<br />
движением источника относительно неподвижной среды распространения; здесь и в дальнейшем<br />
считается, что V c, U c 1. Погрешности оценок параметров, входящих в θ<br />
1<br />
, зависят от характеристик<br />
аддитивной помехи, а также от параметров полезного сигнала. Анализ этих погрешностей будем<br />
проводить с использованием границы Крамера–Рао [7], которая представляет собой нижний предел<br />
матрицы ковариации var{ θ ˆ}<br />
оценки ˆθ вектора θ , являющегося расширением вектора θ<br />
1<br />
:<br />
θ=<br />
(Re{ A},Im{ A}, θ<br />
1)<br />
. Будем считать помеху распределенной по нормальному закону и<br />
H 2<br />
некоррелированной как в пространстве, так и во времени: ξξ = σ I δ , где I – единичная матрица,<br />
δ<br />
ij<br />
– с<strong>им</strong>вол Кронекера, (.) H<br />
Крамера–Рао <strong>им</strong>еет вид:<br />
i j 0 ij<br />
означает эрмитово сопряжение. В рассматриваемой ситуации граница<br />
θ Φ Φ<br />
2 ⎧⎪<br />
⎫⎪<br />
Y Y , (3)<br />
⎩ ⎭<br />
J<br />
ˆ −1<br />
H<br />
var{ } ≥ ; = Re<br />
2 ⎨∑<br />
j j⎬<br />
σ0<br />
⎪ j=<br />
1 ⎪<br />
Рис. 1. Схема движения АР и источника;<br />
положение АР и источника показано для<br />
момента, соответствующего середине<br />
временного интервала наблюдений.<br />
206
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
где<br />
( Aµ j( θ1 )) ( A<br />
j,<br />
n)<br />
∂ ∂ µ<br />
Yj<br />
= =<br />
∂θ<br />
∂θ<br />
k<br />
k = 1,7<br />
, где k – номер параметра в векторе θ . Обычно считается, что ˆ var{ } θ<br />
1<br />
близка к нижней границе: var{ ˆ −<br />
} ≈<br />
σ 2 2<br />
0<br />
| A | NJ ;<br />
это и будет предполагаться в дальнейшем. В силу чисто фазовой структуры модели (2) элементы<br />
матрицы Фишера Φ будут представлять собой суммы только производных фазы φ<br />
jn ,<br />
= argµ jn ,<br />
по<br />
различным параметрам. Производные фазы являются плавными функциями времени и координат<br />
приемных элементов, так что суммирование в (3) может быть с хорошей степенью точности заменено<br />
−1<br />
интегрированием по времени и апертуре АР. При этом элементы Φ и Φ могут быть представлены в<br />
аналитическом виде, что значительно упрощает анализ. В реальных условиях, пом<strong>им</strong>о помехи,<br />
входящей в (1), источником погрешностей оценок координат и скоростей могут быть и другие факторы.<br />
Однако в данной работе мы огранич<strong>им</strong>ся исследованием возможности однозначной оценки параметров,<br />
входящих в θ<br />
1<br />
, либо их части, и анализом связи погрешности их оценки с характерными параметрами<br />
приемной системы – длиной АР, длиной ее перемещения, частотой и т.п.<br />
2. Прямолинейное движение приемной АР. Этот тип движения наиболее часто реализуется на<br />
практике. Будем считать, что АР движется со скоростью V вдоль оси x:<br />
rny ,<br />
() t = 0, rnx ,<br />
() t = xn+ Vt, xn= ( n− ( N + 1) 2) d,<br />
n= 1,..., N ,<br />
где d – межэлементное расстояние, − T 2< t < T 2, T – полное время наблюдения. Для фазы модели<br />
сигнала (2) при не слишком малых расстояниях R воспользуемся приближением Френеля, которое<br />
представ<strong>им</strong> в виде:<br />
⎡1 ⎛ vr<br />
⎞ 1<br />
arg ( ) 2 ⎤<br />
µ<br />
jn ,<br />
=φ<br />
jn ,<br />
= 2πf ⎢ xnsin ψ+ 1 tj xncos vτtj<br />
,<br />
c<br />
⎜ − − ψ−<br />
c<br />
⎟<br />
2Rc<br />
⎥ (4)<br />
⎣ ⎝ ⎠<br />
⎦<br />
где v , v r τ<br />
– радиальная и тангенциальная компоненты разности векторов скорости источника и АР в<br />
момент t = 0 : vr = ( U −V)sin ψ+ U cos ψ , v = ( U −V)cosψ−U<br />
sin ψ . В случае неподвижного<br />
θ Φ , что <strong>им</strong>еет место при малых значениях параметра ( )<br />
x y τ x y<br />
2<br />
⎡ 1 cos ψ<br />
2 ⎤<br />
φ<br />
,<br />
= 2 π f t + ( x + Vt )sin ψ− ( x + Vt ) .<br />
jn j n j n j<br />
источника (4) переходит в ⎢<br />
⎥ Для удобства анализа<br />
⎣ c<br />
2Rc<br />
⎦<br />
возможности оценки различных сочетаний параметров, входящих в (4), вначале огранич<strong>им</strong> их число, а<br />
затем будем увеличивать. <strong>Н</strong>ачнем с ситуации, в которой ищутся только два параметра: частота и синус<br />
пеленга; при этом полож<strong>им</strong> в (4) R →∞, а U = U = 0 . Тогда θ<br />
1<br />
= ( f ,sin ψ)<br />
, а (4) переходит в<br />
( ) ( )<br />
x<br />
φ<br />
jn ,<br />
= 2π ⎡<br />
⎣f 1+ Vsinψ c tj+ f sinψ<br />
c x ⎤<br />
n⎦ . В случае одного приемного элемента с координатой x<br />
1<br />
= 0 ,<br />
как следует из формулы для фазы, по временной завис<strong>им</strong>ости принятого сигнала может быть найден<br />
только параметр f (1 + Vsin ψ c)<br />
, т.е. частота и пеленг не могут быть определены независ<strong>им</strong>о. <strong>Н</strong>аличие<br />
нескольких приемных элементов сн<strong>им</strong>ают эту неопределенность. Дисперсии оценок синуса пеленга и<br />
частоты, в соответствии с (3) при β= V c 1 , составляют<br />
2<br />
2<br />
⎛ C ⎞<br />
1<br />
⎛ 1 V ⎞<br />
⎜ ⎟ ⎜ 2 2 ⎟<br />
SNRout<br />
T D<br />
var{ f } = +<br />
⎝ ⎠ ⎝<br />
y<br />
,<br />
⎠<br />
2 2<br />
⎛ C ⎞<br />
1 ⎛ λ ⎞<br />
var{sin ψ} ≈⎜ ⎟ ⎜ ⎟ ,<br />
SNRout<br />
⎝D<br />
⎠<br />
где λ= c f , SNRout = A NJ σ<br />
0<br />
– отношение «сигнал/помеха» с учетом пространственно-временного<br />
−1<br />
когерентного накопления сигнала от источника, C 1<br />
= 32π ≈ 0.39, D – длина АР, Ls<br />
= VT – длина<br />
траектории движения. Отмет<strong>им</strong>, что в выражениях (5) и далее константа C<br />
1<br />
введена так<strong>им</strong> образом,<br />
чтобы в формулах для дисперсии второй множитель соответствовал ширине функции<br />
неопределенности. В случае неподвижной АР, когда V = 0 , из (5) следует, что среднеквадратичное<br />
отклонение (СКО) оценки частоты и синуса пеленга составляют ~1T и ~ λ D , соответственно. Когда<br />
АР начинает двигаться, СКО оценки синуса пеленга практически не меняется (с учетом того, что β 1),<br />
а СКО оценки частоты увеличивается, стремясь к пределу ~ V D , который уже не зависит от времени<br />
⎝<br />
⎠<br />
(5)<br />
207
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
наблюдения T; с увеличением T растет лишь SNR<br />
out<br />
. Так<strong>им</strong> образом, движение АР не приводит к<br />
повышению углового разрешения, а разрешение по частоте ухудшается.<br />
Иная картина будет наблюдаться при оценке дальности R до источника. Будем считать источник<br />
неподвижным: Ux<br />
= Uy<br />
= 0 , а вектор θ<br />
1<br />
– включающ<strong>им</strong> три неизвестных параметра: θ<br />
1<br />
= ( f ,sin ψ, R)<br />
. В<br />
этом случае дисперсии оценок частоты и синуса пеленга не меняются, а дисперсия оценки дистанции<br />
при β 1 прин<strong>им</strong>ает вид:<br />
( 2sin ψ− ( V c) ( 1+ sin<br />
2 ψ)<br />
) 2<br />
2 4<br />
⎡<br />
⎤<br />
6λ R 15<br />
var{ R} ⎢ ⎥ 2 4 2 2 4<br />
= × +<br />
, L<br />
2 2 4 4 2 2<br />
eff<br />
= Ls + 5Ls<br />
D + D . (6)<br />
π SNRout<br />
cos ψ ⎢Leff<br />
4R D ⎥<br />
⎢ ⎣<br />
⎥ ⎦<br />
Как следует из (6), точность оценки дистанции зависит и от скорости движения, и от синуса пеленга.<br />
<strong>Н</strong>аиболее наглядно дисперсия погрешности оценки дистанции может быть представлена в случае<br />
sin ψ= 0 ; при этом, с учетом β«1, (6) переходит<br />
2 90<br />
в var{ R}<br />
R = 2 2 2<br />
SNRoutm<br />
, (7)<br />
π Fr<br />
2<br />
где mFr = Leff ( λ R)<br />
– число Френеля для апертуры с<br />
эффективной длиной L<br />
eff<br />
, определяемой (6). Из (7)<br />
следует, что по отношению к оценке дистанции до<br />
источника с неизвестной частотой апертурный синтез<br />
при движении АР реализуется полностью:<br />
эффективная длина апертуры определяется<br />
расстоянием, пройденным АР.<br />
В заключение раздела рассмотр<strong>им</strong> кратко<br />
вопрос о возможности оценок проекций скоростей<br />
источника при его движении. <strong>Н</strong>етрудно видеть, что<br />
фаза (4) модели сигнала при прямолинейном<br />
движении АР, полностью характеризуется 4 Рис. 2. Схема движения АР по траектории в виде<br />
параметрами, являющ<strong>им</strong>ися комбинациями искомых 5<br />
окружности.<br />
физических величин: частоты, синуса пеленга,<br />
дистанции и двух проекций скоростей источника. В общем случае найти 5 неизвестных из 4 уравнений<br />
нельзя; одно из неизвестных должно быть исключено. <strong>Н</strong>аиболее целесообразно положить равной нулю<br />
v<br />
r<br />
– радиальную проекцию относительной скорости источника и АР, тогда остальные физические<br />
величины определяются однозначно. Отличие от нуля фактического значения радиальной компоненты<br />
скорости приведет к смещению оценок остальных 4 параметров. Можно показать, однако, что эти<br />
смещения пропорциональны произведениям величины самого параметра на β<br />
r<br />
= vr<br />
c. В реальных<br />
−3 −2<br />
условиях βr ≤ 10 ÷ 10 , так что смещением оценок во многих случаях можно пренебречь. В<br />
следующем разделе будет рассмотрен сценарий криволинейного движения АР, который является более<br />
привлекательным в смысле оценки различных параметров, поскольку фазовая завис<strong>им</strong>ость сигнала в<br />
этом случае будет нелинейной.<br />
3. Граница Крамера-Рао для случая равномерного движения по окружности. Простейш<strong>им</strong><br />
способом получения криволинейной траектории является выполнение циркуляции судном, несущ<strong>им</strong><br />
АР; в этом случае реализуется движение элементов АР по окружности (см. рис. 2). <strong>Н</strong>иже мы покажем,<br />
что в отличие от прямолинейной траектории для круговой траектории оценка всех параметров,<br />
характеризующих источник, может быть получена с использованием одного приемного элемента. В<br />
приближении Френеля, эквивалентном (4), фаза модели сигнала при движении АР по окружности <strong>им</strong>еет<br />
вид:<br />
⎧<br />
2<br />
⎪ 1⎡ ⎛2π ⎞ 1 ⎡ ⎛2π ⎞ ⎤ ⎫⎪<br />
⎤<br />
φ<br />
j, n<br />
= 2π f ⎨tj + ⎢Rs, ncos⎜ tj −ψ+γn⎟−vt r j<br />
− Rs,<br />
nsin⎜ tj −ψ+γn⎟−vτt<br />
⎥<br />
j ⎬<br />
c T 2Rc ⎢<br />
T<br />
⎥<br />
, (8)<br />
⎪ ⎢<br />
⎣<br />
⎝ ⎠ ⎣ ⎝ ⎠<br />
⎩<br />
⎦ ⎪⎭<br />
⎥<br />
⎦<br />
2 2<br />
где Rs, n<br />
= Rs<br />
+ x – радиус круга, описываемого n-м приемным элементом, R<br />
n<br />
s<br />
– радиус круга,<br />
описываемого центром АР, γ = arc tg( x R ) , T – период циркуляции. <strong>Н</strong>епосредственно из (8) следует,<br />
n<br />
n<br />
s<br />
208
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
что неоднозначность в оценке пеленга и частоты исчезает, даже если используется один приемный<br />
элемент, поэтому первоначальное исследование дисперсии оценок можно выполнить в случае N = 1;<br />
при этом Rs, n<br />
= Rs<br />
, γ<br />
n<br />
= 0 . Как и в предыдущем разделе, рассмотр<strong>им</strong> вначале случай R →∞ и<br />
U = U = 0 . Граница Крамера–Рао для вектора θ<br />
1<br />
= ( f , ψ)<br />
при β«1 <strong>им</strong>еет следующий вид:<br />
x<br />
y<br />
2<br />
2<br />
⎛ C ⎞ ⎛<br />
1<br />
λ ⎞ 1<br />
var{ ψ} ≈⎜ ⎟ ,<br />
−2 2<br />
SNRout<br />
⎜ 2R<br />
1 6 cos<br />
s<br />
3 2 ⎟ − π ψ<br />
209<br />
var{ f }<br />
2 2<br />
⎛ C ⎞<br />
1 ⎛ ⎞<br />
≈ ⎜ ⎟ ⎜ ⎟<br />
SNRout<br />
⎝T<br />
⎠<br />
1 1<br />
. (9)<br />
−2 2<br />
1−6π<br />
cos ψ<br />
⎝ ⎠ ⎝ ⎠<br />
⎝ ⎠<br />
Замет<strong>им</strong>, что второй множитель в (9) выделен специально, поскольку <strong>им</strong>енно он отвечает за ширину<br />
диаграммы направленности. Кроме того, с помощью представления (9) удобно сравнивать полученные<br />
результаты со случаем прямолинейной траектории. Как следует из (9), эффективная длина апертуры<br />
пр<strong>им</strong>ерно соответствует диаметру окружности и равна 2R<br />
s<br />
3 2, а СКО оценки частоты ~1/T, как в<br />
случае неподвижной АР. Практически важным является случай, когда источник также движется. Можно<br />
показать, что в этом случае выражение для дисперсии оценки пеленга очень близко к случаю<br />
неподвижного источника (9). Также можно получить точные выражения для границы Крамера–Рао при<br />
оценке дистанции. Качественно результаты для точности оценки пеленга и частоты не отличаются от<br />
результатов для дальней зоны: эффективный размер апертуры при оценке этих параметров равен<br />
пр<strong>им</strong>ерно 2R<br />
s<br />
.<br />
4. Выводы. Проведен анализ потенциальных возможностей апертурного синтеза, использующего<br />
движущуюся горизонтальную антенную решетку, пр<strong>им</strong>енительно к пеленгации источника тонального<br />
сигнала с неизвестной частотой. При прямолинейном движении решетки точность оценки пеленга<br />
соответствует угловому разрешению решетки (ее движение не повышает точность определения угловой<br />
координаты), однако точность оценки дальности до источника повышается и соответствует длине<br />
траектории, пройденной решеткой, т.е. длине синтезированной апертуры. В этом случае может быть<br />
определена также тангенциальная компонента скорости источника при его равномерном и<br />
прямолинейном движении, в то время как радиальная компонента скорости источника не может быть<br />
определена однозначно. Если радиальная компонента отлична от нуля, ее игнорирование приводит к<br />
смещению оценок остальных параметров, однако <strong>им</strong> можно пренебречь при малом отношении скорости<br />
источника к скорости звука. Показано, что при движении даже одного приемного элемента по<br />
криволинейной замкнутой траектории (напр<strong>им</strong>ер, окружности) могут быть однозначно определены все<br />
параметры, характеризующие источник (частота, пеленг, дистанция, проекции скорости источника),<br />
причем точность оценок пеленга и дальности соответствует эффективной апертуре, пр<strong>им</strong>ерно равной<br />
диаметру окружности.<br />
Л И Т Е Р А Т У Р А<br />
1. Autrey S.W. Passive synthetic arrays // IEEE J. Ocean. Eng. – 1988. – V. 84. – №. 2. – P. 592–598.<br />
2. Stergiopoulos S., Sullivan E.J. Extended towed array processing by an overlap correlator // J. Acoust. Soc. Am. – 1989. – V. 86. – №. 1. –<br />
P. 158–171.<br />
3. Nutall A.H. The maximum likelihood estimator for acoustic synthetic aperture processing // IEEE J. Ocean. Eng. – 1992. – V. 17. – №. 1. –<br />
P. 26–29.<br />
4. Yen N.-C., Carey W. Application of synthetic-aperture processing to towed-array data // J. Acoust. Soc. Am. – 1989. – V. 86. – №. 2. – P. 754–<br />
765.<br />
5. Stergiopoulos S. Optimum bearing resolution for a moving towed array and extension of its physical aperture // J. Acoust. Soc. Am. – 1990. –<br />
V. 87. – №. 5. – P. 2128–2140.<br />
6. Edelson G.S., Tufls D.W. On the ability to estimate narrow-band signal parameters using towed arrays // IEEE J. Ocean. Eng. – 1992. – V. 17. –<br />
№. 1. – P. 48–61.<br />
7. Kay S.M. Fundamentals of Statistical Signal Processing / Vol. I. Estimation Theory. Prentice-Hall PTR, 1998.<br />
УДК 534.61+519.25<br />
А.С. Иваненков, А.А. Родионов, В.И. Турчин<br />
ОПРЕДЕЛЕ<strong>Н</strong>ИЕ МОЩ<strong>Н</strong>ОСТИ ИЗОТРОП<strong>Н</strong>ОГО ШУМА С ПОМОЩЬЮ<br />
ГОРИЗО<strong>Н</strong>ТАЛЬ<strong>Н</strong>ОЙ А<strong>Н</strong>ТЕ<strong>Н</strong><strong>Н</strong>ОЙ РЕШЁТКИ В ПРИСУТСТВИИ<br />
БЛИЗКИХ СОСРЕДОТОЧЕ<strong>Н</strong><strong>Н</strong>ЫХ ИСТОЧ<strong>Н</strong>ИКОВ ПОМЕХИ<br />
Институт прикладной физики РА<strong>Н</strong><br />
Россия, 603950 <strong>Н</strong>ижний <strong>Н</strong>овгород, ул. Ульянова, д.46<br />
Тел.: (831) 416-47-74; Факс: (831) 436-59-76<br />
E-mail: ivanenkov@hydro.appl.sci-nnov.ru<br />
В работе рассматривается задача определения уровня изотропного шума моря с помощью горизонтальной антенной
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
решетки в присутствии помехи со сложной пространственной структурой. Для её решения предложен алгоритм,<br />
основанный на использовании пространственного спектра Кейпона. Для исследования возможностей предложенного<br />
метода в качестве помехи использовался набор точечных источников, расположенных на конечном расстоянии до<br />
антенной решетки. С помощью численного моделирования исследована точность предложенного метода в завис<strong>им</strong>ости<br />
от различных параметров. Показано, что использование спектра Кейпона обеспечивает существенное подавление<br />
мощного источника помехи, расположенного вблизи антенной решётки. Проведена экспер<strong>им</strong>ентальная апробация<br />
предложенного метода, подтвердившая его эффективность.<br />
Одн<strong>им</strong> из важных параметров при оценке дальности действия различных гидроакустических<br />
комплексов (шумопеленгаторов, сонаров и т.п.) является уровень акустического шума (так называемого<br />
шума моря). Характеристики шумов могут меняться в завис<strong>им</strong>ости от времени и места. Они могут<br />
различаться в разных водных акваториях, изменяться в завис<strong>им</strong>ости от времени года, погодных условий<br />
и т.п. В связи с эт<strong>им</strong> задача оперативного измерения характеристик шумов моря является весьма<br />
актуальной. Чаще всего гидроакустические системы включают в себя решетки гидрофонов, которые и<br />
могут использоваться для измерения текущего уровня акустического шума. В данной работе будет<br />
рассматриваться задача определения уровня шумов моря с помощью линейной эквидистантной<br />
антенной решетки. В отсутствие сосредоточенных по углу источников шума (судов, береговых<br />
механизмов и т.п.) и прочих помех задача оценки уровня шумов моря является тривиальной. В то же<br />
время антенная решетка может находиться вблизи судна, несущего гидроакустический комплекс, либо<br />
может быть установлена непосредственно на борту судна, которое является источником интенсивной<br />
гидроакустической помехи, искажающей результаты измерений. Кроме того, существенный вклад в<br />
суммарную мощность измеряемого сигнала могут вносить собственные шумы приемных элементов и<br />
гидродинамическая помеха, возникающая при движении судна. Эти обстоятельства требуют разработки<br />
специальных методов оценки уровня шумов моря. В настоящей работе предлагается один из возможных<br />
методов оценки уровня акустической помехи, основанный на использовании так называемой<br />
спектральной оценки Кейпона [1], позволяющей в большой степени отстроиться от мешающих сигналов<br />
1. Постановка задачи. При определении характеристик акустической помехи использовалась<br />
следующая модель прин<strong>им</strong>аемого сигнала. Временной отсчет с номером j сигнала на выходе антенной<br />
решетки после узкополосной фильтрации на частоте f<br />
0<br />
можно представить в виде вектора размерности<br />
N×1, включающего три компоненты: x<br />
j<br />
= τ<br />
j+ ξ<br />
j<br />
+ s<br />
j, j = 1,..., J,<br />
где N – число гидрофонов, τ<br />
j<br />
–<br />
компонента, соответствующая шуму моря, ξ<br />
j<br />
– компонента, соответствующая независ<strong>им</strong>ым на<br />
гидрофонах шумам, s<br />
j<br />
– так называемая структурная (корабельная) помеха. Предполагается, что все<br />
компоненты являются гауссовыми процессами с нулевым средн<strong>им</strong>. В дальнейшем будем полагать<br />
компоненту τ<br />
j<br />
полностью изотропной. При этом ее корреляционная матрица представляется в<br />
следующем виде [2]:<br />
H 2 sin( kd( n − m))<br />
τ<br />
jτ<br />
j<br />
= σ<br />
i<br />
T,<br />
где T =<br />
( ) , (1)<br />
kd n − m nm , = 1, N<br />
где () ⋅ H означает эрмитово сопряжение,<br />
2<br />
25<br />
0<br />
σ<br />
i<br />
– мощность изотропной помехи в<br />
а<br />
б<br />
рассматриваемой полосе частот, d –<br />
-2<br />
20<br />
межэлементное расстояние антенны,<br />
k = 2π<br />
f<br />
-4<br />
0<br />
c – волновое число, c –<br />
15<br />
скорость звука в воде. Корреляционная<br />
-6<br />
матрица независ<strong>им</strong>ой компоненты<br />
10<br />
пропорциональна<br />
-8<br />
H 2<br />
2<br />
единичной: ξξ<br />
j j<br />
= σ<br />
0<br />
I , где σ<br />
0<br />
–<br />
-10<br />
5<br />
мощность независ<strong>им</strong>ой компоненты. -2 0 2<br />
-2 0 2<br />
s s<br />
Структура корабельной помехи в<br />
θ<br />
θ<br />
общем случае неизвестна. При оценке<br />
Рис. 1. Пр<strong>им</strong>ер пространственных спектров (а) и спектров<br />
2<br />
2<br />
погрешности, внос<strong>им</strong>ой структурной Кейпона (б) сигнала при σ<br />
i<br />
= 10 , σ<br />
0<br />
= 3 , d = 1,5 м, f<br />
0<br />
= 200 Гц,<br />
помехой в результат измерений можно, N = 32; сплошная линия – σ 2 s<br />
= 0 ; пунктир – σ 2 s<br />
= 100 .<br />
однако, воспользоваться моделью в<br />
f 0<br />
(s θ<br />
), дБ<br />
210<br />
f(s θ<br />
), дБ
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
виде набора точечных источников, распределенных по объему корабля [3].<br />
В случае, когда антенная решетка обладает заполненной апертурой, а структурная помеха<br />
2 2<br />
отсутствует, нетрудно получить оценки величин σ<br />
0<br />
и σ<br />
i<br />
из величины пространственного спектра для<br />
действительных и мн<strong>им</strong>ых углов:<br />
( ) −1<br />
( ) H<br />
f ( )<br />
0<br />
sθ = N a sθ Rxa sθ<br />
, (2)<br />
где a ( sθ) = exp( iκ xnsθ)<br />
– вектор направлений плоской волны, x ( ( 1) 2)<br />
n=<br />
1, N<br />
n<br />
= n− N + d – координата n-го<br />
J<br />
1 H<br />
гидрофона, s θ<br />
– синус пеленга плоской волны, Rx = ∑ xjx j<br />
– выборочная корреляционная матрица<br />
211<br />
J − j=<br />
1<br />
принятого сигнала. <strong>Н</strong>а рис. 1а сплошной линией показан пр<strong>им</strong>ер такого спектра, построенного для<br />
2<br />
2<br />
2<br />
истинной корреляционной матрицы при σ<br />
i<br />
= 10 , σ<br />
0<br />
= 3 , σ<br />
s<br />
= 0 , d = 1, 5 м, f<br />
0<br />
= 200 Гц, N = 32.<br />
<strong>Н</strong>етрудно показать, что если ширина диаграммы направленности АР много меньше единицы (<strong>им</strong>еется в<br />
виду ширина, измеренная в синусах угла), величина пространственного спектра в области<br />
2 2<br />
2<br />
действительных углов s θ<br />
∈− [ 1,1] составляет σ<br />
i<br />
λ (2 d)<br />
+ σ0<br />
, а в области мн<strong>им</strong>ых углов σ<br />
0<br />
. Так<strong>им</strong><br />
образом, определяя две эти величины по пространственному спектру принятого сигнала, нетрудно<br />
2 2<br />
оценить величины σ<br />
i<br />
, σ<br />
0<br />
. Ситуация меняется при наличии мощного корабельного источника. <strong>Н</strong>а рис. 1<br />
2<br />
а пунктирной линией приведен пространственный спектр при σ<br />
s<br />
= 100 (корабельный источник помехи<br />
моделировался как точечный источник, расположенный на небольшом расстоянии от антенной<br />
решетки). Из рис. 1а видно, что при наличии мощного корабельного источника уровень<br />
пространственного спектра в области действительных углов сильно возрастает. <strong>Н</strong>етрудно показать, что<br />
величина этого роста пропорциональна мощности корабельного источника. Так<strong>им</strong> образом,<br />
использовать пространственный спектр (2) при наличии структурной помехи становится<br />
затруднительно. Понятно, что для оценки уровня изотропного шума необход<strong>им</strong> метод, который был бы<br />
слабо чувствителен к мощной корабельной помехе. Дальнейшее рассмотрение и будет посвящено<br />
одному из таких методов.<br />
2. Метод оценки мощности изотропного шума. Существует целый класс методов, позволяющих<br />
подавлять сосредоточенную помеху. В случае если корреляционная матрица помехи R<br />
s<br />
известна, для<br />
построения оценки пространственного спектра вместо весового вектора a ( s θ<br />
) в (2) должен<br />
−1<br />
использоваться весовой вектор w = Rs<br />
a. <strong>Н</strong>а практике, однако, чаще всего корреляционная матрица<br />
помехи неизвестна. В этом случае можно использовать так называемые адаптивные методы, в которых<br />
матрица R<br />
s<br />
заменяется некоторой оценкой. Принципиальная сложность рассматриваемой в данной<br />
работе модели заключается в невозможности построения отдельной от полезного сигнала (изотропной<br />
компоненты шума) оценки матрицы помехи. Известно, что в рассматриваемом случае оценки<br />
параметров полезного сигнала, получаемые, напр<strong>им</strong>ер, с помощью метода макс<strong>им</strong>ального<br />
правдоподобия, оказываются непригодными для использования [4]. Тем не менее, в работе [4] на основе<br />
регуляризации функции правдоподобия предложен некоторый класс методов и для этого случая. В<br />
частности, к этому классу принадлежит известный метод Кейпона. Метод Кейпона заключается в<br />
нахождении величины<br />
H −1<br />
−<br />
f( s ) ( ( s ) ( )) 1<br />
θ<br />
= a<br />
θ<br />
Rx<br />
a sθ<br />
, (3)<br />
которая для рассматриваемой модели при отсутствии структурной помехи дает кривую пр<strong>им</strong>ерно такого<br />
же вида, что и на рис. 1а. То есть по уровням величины (3) в области действительных и мн<strong>им</strong>ых углов<br />
2 2<br />
можно однозначно оценить σ<br />
i<br />
и σ<br />
0<br />
. При наличии корабельной помехи вид кривой (3) меняется, однако<br />
величина этого изменения невелика и, что более важно, стремится к некоторому пределу при<br />
увеличении мощности корабельной помехи. <strong>Н</strong>а рис. 1б представлены пространственные спектры<br />
Кейпона (3) для тех же параметров, что и на рис. 1а. Видно, что относительная величина увеличения<br />
спектра в области действительных углов существенно меньше, чем при использовании<br />
2 2<br />
пространственного спектра (2). Понятно, что оценка величин σ<br />
i<br />
, σ<br />
0<br />
по такому искаженному спектру<br />
будет <strong>им</strong>еть определенную погрешность, однако есть основания предполагать, что эта погрешность<br />
будет невелика.
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Вначале сделаем одно замечание по поводу конкретной<br />
реализации метода оценки уровней изотропного и<br />
2 2<br />
независ<strong>им</strong>ого шума σ<br />
i<br />
и σ<br />
0<br />
на основе спектра Кейпона (3).<br />
2<br />
Как сказано выше, в отсутствие корабельной помехи оценки σ<br />
i<br />
2<br />
и σ<br />
0<br />
выражаются в аналитическом виде через средние<br />
уровни спектра Кейпона в области действительных и мн<strong>им</strong>ых<br />
углов. Однако некоторая трудность заключается в том, что в<br />
эти формулы входят три коэффициента, которые необход<strong>им</strong>о<br />
предварительно численно находить для каждых конкретных<br />
параметров задачи (таких, как N, f<br />
0<br />
, d и т.п.). Альтернативным<br />
2<br />
2<br />
способом нахождения оценок σ<br />
i<br />
и σ<br />
0<br />
является<br />
непосредственная аппрокс<strong>им</strong>ация спектра Кейпона (напр<strong>им</strong>ер,<br />
методом на<strong>им</strong>еньших квадратов). Рассмотр<strong>им</strong> подробнее<br />
Рис. 2. Завис<strong>им</strong>ости СКО оценки<br />
данный способ. Пусть f ( s θ<br />
) – спектр Кейпона (3), уровня изотропного шума от уровня<br />
2 2<br />
построенный по принятой реализации сигнала, а f корабельной помехи для трёх<br />
m( s θ<br />
, σ<br />
i<br />
, σ<br />
0<br />
)<br />
– спектр Кейпона (3), построенный для модельной матрицы<br />
различных значений уровня<br />
2<br />
2 2<br />
2 2<br />
2 2 независ<strong>им</strong>ого шума σ<br />
0<br />
= 3; 20; 50 ,<br />
Rm<br />
= σ<br />
i<br />
T+<br />
σ<br />
0<br />
I. Тогда оценки ˆi<br />
σ и ˆ0<br />
σ величин σ<br />
i<br />
и σ<br />
0<br />
мощность изотропной компоненты<br />
ищутся с помощью мин<strong>им</strong>изации нормы разности<br />
2<br />
пространственных спектров:<br />
σ<br />
i<br />
= 10 .<br />
Рис. 3. Пространственные спектры исходного экспер<strong>им</strong>ентального сигнала (а) и модельного сигнала (б)<br />
при наличии политонального источника (сплошная линия) и фона (штрихпунктирная линия)<br />
центральная частота F<br />
c<br />
= 1025 Гц.<br />
Рис. 4. Графики завис<strong>им</strong>ости оценок мощности изотропной компоненты по методу Кейпона от частоты для<br />
фонового сигнала (жирная сплошная линия) и сигнала, полученного при включенном широкополосном<br />
вибраторе (сплошная линия).<br />
212
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
λ (2 d )<br />
2 2 2 2 2<br />
ˆ<br />
i 0<br />
= −<br />
m θ i 0<br />
2 2<br />
( σi<br />
, σ 0 ) −λ<br />
(2 d )<br />
( ˆ σ , σ ) argmin ∫ ( f f ( s , σ , σ )) dsθ<br />
.<br />
При отсутствии серьезных вычислительных ограничений этот метод предпочтительнее, поскольку<br />
использует истинный вид модельного спектра вместо его ступенчатого приближения. В доказательство<br />
эффективности метода приведём некоторые результаты численного моделирования. <strong>Н</strong>а рис. 2<br />
представлены завис<strong>им</strong>ости СКО (среднеквадратичного отклонения) оценки уровня изотропного шума<br />
2<br />
от уровня корабельной помехи для трех различных значений уровня независ<strong>им</strong>ого шума σ<br />
0<br />
= 3; 20; 50 .<br />
2<br />
Мощность изотропной компоненты составляла σ<br />
i<br />
= 10 . Положение источника помехи выбиралось<br />
так<strong>им</strong> же, как и для рис. 1б. Видно, что при увеличении мощности структурной помехи СКО оценки<br />
изотропного шума стремится к определенному пределу. При увеличении мощности независ<strong>им</strong>ой<br />
компоненты СКО увеличивается.<br />
3. Экспер<strong>им</strong>ентальные результаты. В данном разделе представлены результаты обработки<br />
данных, полученных в результате натурных экспер<strong>им</strong>ентов на Ладожском озере. Рис. 3 соответствует<br />
экспер<strong>им</strong>ентам 2009 года, когда антенная решётка из 64 элементов помещалась на глубине десяти<br />
метров между двумя дебаркадерами, в одном из которых находился широкополосный<br />
гидроакустический излучатель, с помощью которого моделировалась структурная помеха. Параметры<br />
экспер<strong>им</strong>ента: межэлементное расстояние d = 0,19 ì ; частота дискретизации F<br />
s<br />
= 23,84 Гц, частота<br />
излучения F<br />
c<br />
= 1025 Гц. <strong>Н</strong>а рисунке 3 (а) приведены пространственные спектры сигналов для фонового<br />
шума (показан штрихпунктирной линией) и при включенном близко расположенном источнике<br />
(показан сплошной линией). <strong>Н</strong>а рисунке 3 (б) приведены соответствующие спектры модельных<br />
сигналов, полученных с помощью аппрокс<strong>им</strong>ации пространственных спектров Кейпона принятых<br />
сигналов. Погрешность определения уровня изотропной компоненты в данном случае оценивается<br />
разницей центральной части спектров модельных сигналов (б) и составляет для данной частоты не<br />
более 1 дБ. В 2010 году проводился экспер<strong>им</strong>ент, в котором в качестве структурной помехи выступал<br />
набор широкополосных вибрационных источников, помещенных внутри объекта со сложной<br />
пространственной структурой, <strong>им</strong>итирующего носитель гидроакустической антенной решетки.<br />
Изучались возможности предложенного метода для достаточно большого диапазона частот. Для этого<br />
проводилась обработка большого набора прилегающих друг к другу частотных полос. Ширина полосы<br />
фильтрации F<br />
s<br />
выбиралась фиксированной. <strong>Н</strong>а рис. 4 представлены две завис<strong>им</strong>ости мощности<br />
изотропного шума от частоты, полученные в результате аппрокс<strong>им</strong>ации пространственных спектров<br />
Кейпона принятых сигналов. Сигнал, излучаемый акустическ<strong>им</strong> вибратором, находился в полосе 1000–<br />
2000 Гц. Жирная сплошная кривая соответствует случаю измерения фоновой помехи при выключенном<br />
широкополосном вибраторе, сплошная – при включенном. По разнице представленных кривых можно<br />
оценить погрешность предложенного метода. Видно, что погрешность не превышает 2 дБ (притом, что<br />
превышение уровня помехи над уровнем фона на гидрофонах достигало 30 дБ). Так<strong>им</strong> образом, из<br />
представленных результатов видно, что метод Кейпона позволяет существенно отстроиться от<br />
источников структурной помехи, что подтверждают эффективность представленного метода оценки<br />
уровня фоновой помехи в натурных условиях.<br />
4. Выводы. В работе предложен метод оценки уровня изотропных шума моря, основанный на<br />
аппрокс<strong>им</strong>ации пространственного спектра Кейпона принятого сигнала с помощью модели, включающей<br />
сумму изотропного шума и независ<strong>им</strong>ой помехи. Показано, что использование спектра Кейпона<br />
обеспечивает существенное подавление источника сосредоточенной помехи. Представлены результаты<br />
экспер<strong>им</strong>ентальной апробации, подтверждающие эффективность предложенного метода.<br />
Л И Т Е Р А Т У Р А<br />
1. Haykin S., Nonlinear methods of spectral analysis / Springer-Verlag. 1983.<br />
2. Cox H. Spatial correlation in arbitrary noise fields with application to ambient sea noise // J. Acoust. Soc. Am. – 1973. –<br />
V. 54. – P. 1289–1301.<br />
3. Гладилин А.B. Эффективность линейной антенны при наличии структурной помехи // Сборник трудов XX сессии<br />
Российского акустического общества. – М.: ГЕОС, 2008. – Т. 2. – С. 319–323.<br />
4. Rodionov A., Turchin V. Adaptive processing of signals in antenna arrays using the maximum likelihood method //<br />
Radiophysics and Quantum Electronics. – 2009. – V. 52. – №. 4. – P. 311–321.<br />
213
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
УДК 534.87<br />
В.А. Калью, В.Ю. <strong>Н</strong>еворотин, А.А. Правдин<br />
ПОИСК КВАЗИГАРМО<strong>Н</strong>ИЧЕСКИХ СОСТАВЛЯЮЩИХ СЛУЧАЙ<strong>Н</strong>ОГО<br />
ВИБРОАКУСТИЧЕСКОГО СИГ<strong>Н</strong>АЛА <strong>Н</strong>А ОС<strong>Н</strong>ОВЕ ВЕРОЯТ<strong>Н</strong>ОСТ<strong>Н</strong>ОГО КРИТЕРИЯ<br />
ФГУП «Ц<strong>Н</strong>ИИ <strong>им</strong>. акад. А.<strong>Н</strong>. Крылова»<br />
Россия, 196158 Санкт-Петербург, Московское шоссе, 44<br />
Тел.: 7 (812) 723-66-07; Факс: 7 (812) 727-96; E-mail: krylov@krylov.spb.ru<br />
В работе вводится новая характеристика узкополосного случайного процесса: вероятность идентификации сигнала,<br />
отфильтрованного в узкой полосе частот, как гармонического сигнала. Фрагменты автокорреляционных функций<br />
эталонного и натурного сигналов сравниваются по статистическому критерию согласия с использованием функций<br />
распределений их значений. Строятся завис<strong>им</strong>ости указанной выше вероятности идентификации от длительности<br />
выбранного фрагмента автокорреляционной функции, затем по заданному пороговому значению вероятности<br />
идентификации находится интервал корреляции (время когерентности). Полученные значения вероятности и времени<br />
когерентности характеризуют сигнал на выходе узкополосного фильтра как гармонический. Анализируется различие<br />
построенных характеристик для стационарного и нестационарного процессов: немонотонность завис<strong>им</strong>ости<br />
вероятности от длительности фрагмента автокорреляционной функции для нестационарного процесса. Степень<br />
нестационарности процесса описывается с помощью индекса немонотонности указанной завис<strong>им</strong>ости.<br />
Для реальных сигналов за время их наблюдения T всегда <strong>им</strong>еют место нарушения гармонического<br />
характера колебаний, в том числе и случайные, что приводит к нарушению линейчатого характера<br />
спектра, т.е. вместо линии в спектре сигнала в некоторой области частот наблюдается спектральный<br />
макс<strong>им</strong>ум, <strong>им</strong>еющий иногда довольно сложную форму, к тому же искаженную случайными<br />
флуктуациями. В этом случае можно говорить о периодической компоненте в сигнале только на<br />
некотором времени когерентности τ ког , а сам сигнал в этом случае называется квазигармоническ<strong>им</strong>, при<br />
этом понятие дискретной составляющей спектра сигнала теряет определенность.<br />
Авторами предлагается [1,2] подход к определению дискретной составляющей спектра (ДСС)<br />
исследуемого сигнала, основанный на вероятностном критерии Колмогорова-Смирнова сравнения двух<br />
функций распределения вероятностей. Этот подход к определению квазигармонической составляющей в<br />
сигнале состоит в сравнении фрагментов нормированных автокорреляционных функций гармонического<br />
колебания со случайной начальной фазой и исследуемого сигнала, для сравнения последовательно<br />
выбираются фрагменты различной длительности и местоположения в реализации автокорреляционной<br />
функции исследуемо сигнала ρ(τ).<br />
Сравнение двух указанных автокорреляционных функций может выполняться по их различным<br />
характеристикам. Часто пр<strong>им</strong>еняется сравнение фактического значения автокорреляционной функции с<br />
уровнем флуктуаций, рассчитанным для автокорреляционной функции δ-коррелированного процесса,<br />
пропущенного через полосовой фильтр шириной ∆f [3].<br />
Степень соответствия фрагмента автокорреляционной функции исследуемого сигнала<br />
гармоническому колебанию можно получить, сравнивая функции распределения вероятностей значений<br />
этих двух автокорреляционных функций в пределах фрагмента. Понятно, что для гармонического<br />
колебания со случайной начальной фазой автокорреляционная функция ρ 0 (τ) <strong>им</strong>еет вид<br />
ρ0( τ ) = cosω0τ<br />
, (1)<br />
а её функция распределения<br />
⎛<br />
⎞<br />
F э 1 1<br />
= ⎜ + arcsin x⎟<br />
. (2)<br />
ρ 0 ⎝ 2 π ⎠<br />
Для исследуемого процесса функцию распределения вероятностей значений ρ(τ) на выбранном<br />
фрагменте длительностью ∆τ обознач<strong>им</strong> F ρ (x,∆τ). Сравнение функций F ρ (x,∆τ) и F Э<br />
ρ ( x ) проведем по<br />
0<br />
двустороннему критерию Колмогорова-Смирнова [4,5], пр<strong>им</strong>еняемому для проверки непараметрической<br />
гипотезы о равенстве двух функций распределения. При выполнении этой процедуры [5] для каждого<br />
фрагмента автокорреляционной функции ρ(τ) длительностью ∆τ получается значение вероятности<br />
{ ( , ) ~ ( )}<br />
x F Э<br />
ρ ∆τ<br />
ρ<br />
P ( τ , ∆ τ ) = P F<br />
, с которой функции F ρ (x,∆τ) и F Э ρ ( x ) можно считать неразлич<strong>им</strong>ыми, то<br />
0<br />
ρ<br />
0 x<br />
есть распределение значений фрагмента автокорреляционной функции исследуемого сигнала такое же,<br />
как и у гармонического сигнала со случайной начальной фазой.<br />
Выполняя описанную процедуру, можно найти в реализации ρ(τ) фрагмент макс<strong>им</strong>альной<br />
длительности при вероятности, превышающей пороговое значение. Это значение длительности фрагмента<br />
выбирается в качестве времени внутренней когерентности процесса τ ког , а величина обратная ∆f = 1 ∆τ<br />
,<br />
214
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
считается естественной шириной дискретной составляющей, при этом важно также указать<br />
соответствующее значение вероятности P = Р( τ ког ), с которой исследуемый процесс на интервале τ ког<br />
классифицируется как гармоническое колебание.<br />
Эти два параметра Р и τ ког – являются объективными показателями идентификации участка спектра<br />
сигнала как дискретной составляющей.<br />
Для проверки гипотезы о квазигармоничности участка автокорреляционной функции вводится<br />
пороговое значение вероятности P 0 , ниже которого гипотеза отвергается, при этом критическое значение<br />
вероятности Р кр выбирается на уровне 0,25÷0,30, что может трактоваться, как пороговое значение<br />
когерентности процесса, которое часто в физических исследованиях прин<strong>им</strong>ается равным е -1 .<br />
Принципиальная схема реализации алгоритма идентификации дискретной составляющей спектра с<br />
использованием критерия Колмогорова-Смирнова приведена на рисунке 1.<br />
Выделение<br />
фрагмента спектра<br />
Фильтрация<br />
сигнала<br />
<strong>Н</strong>ахождение<br />
автокорреляционной<br />
функции<br />
<strong>Н</strong>ахождение функции<br />
распределения фрагментов<br />
автокорреляционной функции<br />
Сравнение по критерию<br />
Колмогорова-Смирнова с<br />
эталонным распределением<br />
Рис. 1 Принципиальная схема алгоритма идентификации дискретной составляющей спектра по критерию<br />
Колмогорова-Смирнова.<br />
В результате работы описанного выше алгоритма, выбирая макс<strong>им</strong>альные вероятности,<br />
соответствующие участкам различной длительности фрагмента автокорреляционной функции, можно<br />
построить завис<strong>им</strong>ость вероятности идентификации от длительности временного участка (рис.2). При<br />
анализе данной завис<strong>им</strong>ости можно определить длительность фрагмента, соответствующую заданной<br />
пороговой вероятности P идентификации сигнала как гармонического – время когерентности τ<br />
0<br />
ког .<br />
Как показал анализ завис<strong>им</strong>остей вероятности от длительности фрагмента автокорреляционной<br />
функции, выполненный с различными типами сигналов, для стационарных сигналов эта завис<strong>им</strong>ость<br />
описывается монотонно убывающей функцией (рис. 2), а для нестационарных сигналов эта завис<strong>им</strong>ость<br />
немонотонна (рис.3).<br />
Рис. 2. Завис<strong>им</strong>ость вероятности от длительности<br />
фрагмента для стационарного сигнала<br />
Рис.3. Завис<strong>им</strong>ость вероятности от длительности<br />
фрагмента для нестационарного сигнала<br />
215
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Для характеристики степени нестационарности сигнала предлагается ввести показатель<br />
нестационарности, определяемый как индекс немонотонности исследуемой завис<strong>им</strong>ости. Численно этот<br />
показатель θ определяется следующ<strong>им</strong> образом:<br />
θ =<br />
1<br />
∫<br />
p0<br />
p⋅<br />
n<br />
1<br />
∫<br />
p0<br />
( )<br />
p dp<br />
, (3)<br />
pdp<br />
где р – значение вероятности, изменяющееся от порогового значения p до 1;<br />
0<br />
п(р) – количество пересечений рассматриваемой кривой и горизонтальной прямой на уровне р.<br />
Так<strong>им</strong> образом, коэффициент θ характеризует степень немонотонности исследуемой завис<strong>им</strong>ости,<br />
для стационарного процесса он равен 1, а для нестационарного процесса > 1.<br />
При пр<strong>им</strong>енении данного способа к модельным сигналам были получены завис<strong>им</strong>ости для сигналов<br />
с частотной модуляцией и амплитудной модуляцией, соответственно рис.4 и рис.5.<br />
Вероятность<br />
1<br />
0.9<br />
0.8<br />
0.7<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
Вероятность<br />
1<br />
0.9<br />
0.8<br />
0.7<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
0<br />
0 2 4 6 8 10 12 14<br />
Длительность фрагмента, с<br />
216<br />
0.2<br />
0 2 4 6 8 10 12 14 16 18<br />
Длительность фрагмента, с<br />
Рис. 4. Завис<strong>им</strong>ость вероятности от длительности Рис. 5. Завис<strong>им</strong>ость вероятности от длительности<br />
фрагмента для частотно-модулированного сигнала. фрагмента для амплитудно-модулированного сигнала<br />
Моделирование частотно-модулированного сигнала производилось для тонального сигнала частоты<br />
50 Гц с частотой девиации 0,05 Гц.<br />
Моделирование амплитудно-модулированного сигнала, производилось для тонального сигнала с<br />
коэффициентом модуляции 0,3.<br />
Для частотно-модулированного сигнала индекс немонотонности составил θ =10,8, а для<br />
амплитудно-модулированного сигнала индекс немонотонности составил θ =2,77. Полученные индексы<br />
немонотонности позволяют оценить степень нестационарности сигнала путем сравнения полученных<br />
индексов, то есть по результатам обработки смоделированных сигналов можно говорить о том, какой<br />
сигнал является более нестацонарным.<br />
Так<strong>им</strong> образом, введенный индекс θ может рассматриваться, как обобщенная численная<br />
характеристика нестационарности узкополосного процесса, независ<strong>им</strong>ая от конкретного вида его<br />
нестационарности и потому позволяющая сравнивать разные по типу процессы.<br />
Индекс θ оказывается также полезным для оценки времени когерентности сигнала, который можно<br />
получить путем стационаризации исследуемого нестационарного сигнала. Так, если для нестационарного<br />
сигнала с индексом нестационарности θ наибольшая длительность фрагмента его автокорреляционной<br />
функции, идентифицируемого с вероятностью Р 0 как гармоническое колебание, составляет величину τ max ,<br />
то при стационаризации данного сигнала его время когерентности, соответствующее такому же значению<br />
Р 0 , можно оценить как<br />
τ<br />
τ<br />
max<br />
ког = . (4)<br />
θ<br />
Для пр<strong>им</strong>ера на рис. 6 представлена завис<strong>им</strong>ость вероятности идентификации для<br />
квазигармонического натурного сигнала, излученного неподвижным источником и принятого<br />
неподвижным приемником. Как видно, принятый сигнал стационарен (θ = 1), и время его когерентности,<br />
соответствующее вероятности Р 0 = 0,25, равно 0,33 с. <strong>Н</strong>а рис. 7 представлена аналогичная завис<strong>им</strong>ость
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
вероятности идентификации для принятого приемником натурного сигнала, излученного тем же<br />
источником, но движущ<strong>им</strong>ся относительно приемника. Как видно, из-за амплитудной модуляции и<br />
фазовых искажений, вызванных эффектом Доплера, принятый сигнал нестационарен, что находит<br />
отражение в немонотонной завис<strong>им</strong>ости вероятности идентификации, при этом θ = 2,08, а макс<strong>им</strong>альная<br />
длительность фрагмента, соответствующего вероятности Р 0 = 0,25, равна 0,66 с.<br />
Вероятность<br />
1<br />
0.9<br />
0.8<br />
0.7<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
0<br />
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45<br />
Длительность фрагмента, с<br />
Рис. 6. Завис<strong>им</strong>ость вероятности от длительности<br />
фрагмента автокорреляционной функции для сигнала<br />
полученного в ходе стояночных измерений.<br />
Рис. 7. Завис<strong>им</strong>ость вероятности от длительности<br />
фрагмента автокорреляционной функции, для сигнала<br />
движущегося источника<br />
Стационаризация принятого сигнала путем компенсации амплитудных и фазовых искажений,<br />
вызванных движением источника относительно приемника, могла бы привести к времени когерентности<br />
0,66с<br />
τ ког = = 0, 32с<br />
, (5)<br />
2,08<br />
что соответствует стационарному сигналу от неподвижного источника.<br />
Изложенный подход к идентификации узкополосного сигнала как гармонического колебания с<br />
указанием вероятности этой идентификации и с учетом нестационарности этого сигнала позволит более<br />
строго сформулировать определение дискретной составляющей спектра сигнала, в том числе и<br />
нестационарного, а также назвать характеристики этой дискретной составляющей.<br />
Л И Т Е Р А Т У Р А<br />
1. Калью В.А., <strong>Н</strong>еворотин В.Ю., Правдин А.А. Вероятностный подход к определению дискретной составляющей спектра<br />
случайного сигнала // Труды Г<strong>Н</strong>Ц РФ ФГУП «Ц<strong>Н</strong>ИИ <strong>им</strong>.акад.А.<strong>Н</strong>.Крылова», СПб., 2010 – Вып.52 (336). – С.9 – 14.<br />
2. Калью В.А., <strong>Н</strong>еворотин В.Ю., Правдин А.А. Способ обнаружения сигнала источника, порождающего дискретную<br />
составляющую в спектре суммарного сигнала нескольких источников // Патент № 2393490 с приоритетом от 03.02.2009 //<br />
Опубликовано: 27.06.2010 бюллетень № 18.<br />
3. <strong>Н</strong>овиков А.К. Статистические измерения и обнаружение сигналов. СПб: Г<strong>Н</strong>Ц РФ ФГУП «Ц<strong>Н</strong>ИИ <strong>им</strong>.акад.А.<strong>Н</strong>.Крылова», 2006.<br />
4. «Математическая энциклопедия». Т.2, М., «Советская энциклопедия», 1979.<br />
5. MATLAB. The Language of Technical Computing Using MATLAB. The Math Warks. Inc. USA, 2000.<br />
217
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
УДК 534:629.12<br />
В.А.Калью, В.И.Таровик, В.Ю.Чижов<br />
УМЕ<strong>Н</strong>ЬШЕ<strong>Н</strong>ИЕ ПОДВОД<strong>Н</strong>ОЙ ШУМ<strong>Н</strong>ОСТИ КОММЕРЧЕСКИХ СУДОВ – АКТУАЛЬ<strong>Н</strong>АЯ<br />
ЗАДАЧА СУДОВОЙ АКУСТИКИ<br />
Г<strong>Н</strong>Ц ФГУП «Ц<strong>Н</strong>ИИ <strong>им</strong>.акд.А.<strong>Н</strong>.Крылова»<br />
Россия, 196158, Санкт-Петербург, Московское шоссе, д.44<br />
Тел.: 7 (812) 723-66-07; Факс: 7 (812) 727-93-23; E-mail: krylov@krylov.spb.ru<br />
Подводный шум судов и морских сооружений приводит к шумовому загрязнению Мирового океана и отрицательно воздействует<br />
на его животный мир, так как этот шум затрудняет или делает невозможными коммуникацию и ориентацию в<br />
океане большинства морских обитателей. В 2009 г. в США был принят гражданский стандарт по измерению подводного<br />
шума судна, а в 2010 г. корпорация DNV сформулировала требования к шумности судов различных классов. <strong>Н</strong>есоответствие<br />
эт<strong>им</strong> требованиям может наказываться штрафом или запретом на посещение порта, так<strong>им</strong> образом, экологические<br />
причины становятся фактором конкурентной экономической борьбы. Предлагается в обеспечение коммерческой и экологической<br />
безопасности строящихся судов выполнить работы по созданию системы нормирования, измерения, контроля и<br />
мониторинга виброшумовых характеристик оборудования, параметров средств виброакустической защиты и подводного<br />
шума коммерческого судна на этапах его проектирования, строительства и эксплуатации.<br />
Как известно, всякое судно несет в себе потенциальную угрозу экологическому состоянию окружающей<br />
морской среды. Мировое морское транспортное сообщество выработало ряд принципиальных<br />
требований к техническому состоянию действующего и строящегося флота. Реализация этих требований<br />
позволила в значительной степени снизить техногенное воздействие на морскую среду и её животный<br />
мир. Повышение экологического качества морского транспорта привело, в свою очередь, к необход<strong>им</strong>ости<br />
учета таких источников загрязнения акватории, которые до последнего времени отодвигались на второй<br />
план. Одн<strong>им</strong> из таких источников является шумовое загрязнение акватории, то есть подводный шум<br />
транспортного флота.<br />
<strong>Н</strong>еобход<strong>им</strong>о отметить, что экологические требования к судну являются одновременно и эффективным<br />
средством конкурентной борьбы при решении вопросов о привлечении того или иного судна к участию<br />
в реализации <strong>им</strong>портно-экспортного контракта, в предоставлении преференций экологически благополучным<br />
судам, а также и при согласовании фрахтовых и арендных ставок на суда. От экологического и,<br />
в частности, акустического состояния судна зависит коммерческая эффективность торгового контракта.<br />
Морское транспортное судно является сложным инженерным сооружением с высокой степенью<br />
энерговооруженности. Основными источниками подводного шума судна являются:<br />
• вспомогательные машины и оборудование;<br />
• пропульсивный комплекс судна, его гребные винты, линия валопровода, рулевая гидравлика:<br />
• шум главного двигателя и связанных с н<strong>им</strong> агрегатов и систем;<br />
• шум, связанный с гидродинамическ<strong>им</strong> вза<strong>им</strong>одействием корпуса судна с натекающ<strong>им</strong> потоком, с<br />
движением на волнении, слемингом и др.<br />
Интенсивность шумового загрязнения акватории зависит от мощности акустического излучения и<br />
частотного диапазона: в диапазоне 10-100 кГц оно является относительно локальным в радиусе нескольких<br />
километров от источника, в диапазоне 5-100 Гц распространяется на значительные расстояния в сотни<br />
километров в завис<strong>им</strong>ости от гидрологических условий акватории.<br />
Интенсивность проявления конкретного источника в акустическом поле в значительной степени зависит<br />
от скорости движения судна. <strong>Н</strong>апр<strong>им</strong>ер, шум машин, механизмов и судовых систем превалирует на<br />
низких скоростях хода практически во всем диапазоне частот. С ростом скорости хода знач<strong>им</strong>ым становится<br />
излучение гребного винта, которое <strong>им</strong>еет характер квазигармонических сигналов на вальных и лопастных<br />
частотах. Широкополосный характер спектра излучения гребного винта в высокочастотной области<br />
спектра связан с особенностями обтекания лопастей набегающ<strong>им</strong> потоком. Свой значительный<br />
вклад при больших скоростях хода судна вносит кавитационный шум гребного винта.<br />
Шумовое загрязнение акватории, воздействуя на морскую фауну, наносит ей ущерб различного характера.<br />
Основными факторами негативного воздействия на морских животных являются:<br />
• нарушения коммуникативных связей;<br />
• нарушение репродуктивных возможностей морской фауны;<br />
• прямое негативное воздействие на физиологическое состояние морских животных;<br />
• дезориентация в пространстве.<br />
Частотные диапазоны воздействия шума на морских обитателей <strong>им</strong>еют свои особенности для каждого<br />
отдельного вида, что определяется размерами животных, их физиологией, способами коммуникаций,<br />
ориентации в пространстве и пр. <strong>Н</strong>еобход<strong>им</strong>о отметить, что шумовое воздействие морского транспорта<br />
«бьет» по морской фауне во всех частотных диапазонах её жизнедеятельности.<br />
218
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
До последнего времени подводная шумность корабля, как важный фактор его боеспособности, интересовала,<br />
пре<strong>им</strong>ущественно, военно-морской флот. Однако времена меняются, и в 2009 году появился<br />
первый американский стандарт (ANSI / ASA S12.64-2009) [1], регламентирующий методические аспекты<br />
измерений подводного шума судов гражданского флота. Естественно полагать, что за согласованными<br />
стандартами измерений подводного шума последуют стандарты по его нормированию и контролю.<br />
Компания Det Norske Vepritas (DNV) сделала свой шаг в этом направлении, разработав классификационные<br />
требования к гражданск<strong>им</strong> судам новой постройки, где сформированы нормативы подводной<br />
шумности для различных типов судов [2].<br />
<strong>Н</strong>а рисунке 1 приведены нормативные требования к уровням подводного шума рыболовных и<br />
транспортных коммерческих судов. Следует отметить, что приведенные нормативные уровни шума являются<br />
довольно жестк<strong>им</strong>и. Так<strong>им</strong> уровням обычно соответствуют корабли ВМФ, на которых широко<br />
пр<strong>им</strong>еняются средства вибро-акустической защиты.<br />
Уровень шума, дБ. / Noise level,dB<br />
180<br />
170<br />
160<br />
150<br />
140<br />
Реж<strong>им</strong> тихого хода<br />
Транспортный реж<strong>им</strong><br />
130<br />
10 20 40 80 160 315 630 1250 2500 5000 10000 20000 40000 80000<br />
частота, Гц / frequency, Hz<br />
Рис. 1. Третьоктавный спектр макс<strong>им</strong>ально допуст<strong>им</strong>ых уровней шума для коммерческих судов (SILENT- F)<br />
<strong>Н</strong>а рисунке 2 приведены спектры подводной шумности судна. Отчетливо видно, что на малых скоростях<br />
хода подводный шум определяется низкочастотным излучением гребного винта, работой главного<br />
двигателя и судовых машин. <strong>Н</strong>а высоких скоростях хода превалируют широкополосные шумы гидродинамической<br />
природы и кавитационный шум гребного винта.<br />
У нас нет возможности сопоставить приведенные данные с данными аналогичного крупнотоннажного<br />
судна российской постройки, так как ни в СССР, ни в современной России подводный шум гражданского<br />
флота никогда не нормировался, а судовая акустика ориентировалась на вопросы обеспечения<br />
санитарных норм и обитаемости судовых помещений.<br />
Уровень шума, дБ. / Noise level,dB<br />
140 об/мин 105 об/мин 70 об/мин<br />
Х 120 об/мин 90 об/мин<br />
Частота,Гц / Frequency,Hz<br />
Рис. 2. Типовой третьоктавный спектр подводного шума коммерческого судна<br />
219
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Измерение и контроль подводного шума обеспечивается определенной системой измерительных<br />
средств и соответствующ<strong>им</strong>и методиками их использования (рисунок 3).<br />
Рис. 3. Акустические системы измерения и контроля подводного шума судов<br />
Первая группа связана с использованием специальных исследовательских судов - носителей измерительного<br />
и анализирующего оборудования. Вторая группа включает в себя стационарные измерительноконтрольные<br />
системы, сформированные в акватории акустического полигона. В третьей группе используются<br />
мобильные плавучие акустические станции для возможности использования в любом морском<br />
районе.<br />
Постановка вопроса о необход<strong>им</strong>ости учета подводного шума как важного судового параметра основывается<br />
не только на появлении американских стандартов и регламентирующих документов DNV, но<br />
и на пр<strong>им</strong>ерах реально существующих систем контроля подводной шумности судов в акваториях некоторых<br />
терминалов по приему и перевалке сжиженного природного газа (СПГ). Так, в акватории терминала<br />
СПГ порта Gross-Cacouna, Канада сформирована гидрофонная стационарная система контроля подводной<br />
шумности танкеров СПГ, приходящих для проведения грузовых операций.<br />
Так<strong>им</strong> образом, сегодня отчетливо проявляется эволюция требований к подводной шумности судов<br />
гражданского флота, которая проходит следующие основные этапы:<br />
• Исследования подводного шума судов во время проведения портовых и грузовых операций и на<br />
маршруте следования;<br />
• Разработка стандартов проведения измерений подводного шума, предусматривающих использование<br />
сертифицированных измерительных акустических систем и соответствующей методологии<br />
обработки и представления результатов измерений;<br />
• Создание портовых акустических систем измерения и контроля подводного шума судов;<br />
• Разработка требований к подводной шумности, её сертификация для каждого судна и контроль<br />
соответствия нормативным уровням;<br />
• Разработка юридической базы для пр<strong>им</strong>енения санкций в отношении судов, не соответствующих<br />
нормативам по подводной шумности.<br />
В качестве пр<strong>им</strong>ера такой модели эволюции требований к транспортным средствам служит аналогия<br />
с параметром шумности авиационного транспорта. Известно, что ужесточение требований к шумности<br />
привело к запрету на полеты в страны ЕС некоторых типов самолетов российской гражданской авиации.<br />
Очевидно, что понятные экологические требования трансформировались в инструмент жесткой конкурентной<br />
борьбы, в результате которой российской гражданской авиации был нанесен огромный ущерб.<br />
По аналогии с авиационным транспортом, и в области морского бизнеса снижение подводной шумности<br />
коммерческого судна, представляется не только как естественное стремление к его экологической<br />
чистоте, но и как средство конкурентного противодействия для нанесения коммерческого ущерба безопасности<br />
<strong>им</strong>портно-экспортного контракта, в котором участвует судно. При этом подводная шумность<br />
судна выступает как судовой параметр [3].<br />
Важный судовой коммерческий параметр, это тайм-чартерный эквивалент судна, который определяет<br />
суточную сто<strong>им</strong>ость судна для судовладельца. В эту сто<strong>им</strong>ость входят все постоянные затраты на<br />
поддержание технической и оперативной готовности судна к выполнению транспортировки груза. напри-<br />
220
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
мер, для большинства танкеров СПГ тайм-чартерный эквивалент укладывается в диапазон 60-120 тыс.<br />
долларов США в сутки. Понятно, что танкер СПГ, не соответствующий требованиям по параметру подводной<br />
шумности, может быть подвергнут различным санкциям и запретам. Можно предполагать их различную<br />
тяжесть, т.е. от задержки времени на акцепт судна в порту назначения до последующего запрета<br />
на вход в данный порт.<br />
Понятно, что определенной защитой судна и <strong>им</strong>портно-экспортного коммерческого контракта должен<br />
стать «Сертификат подводной шумности судна», выданный признанной международной организацией.<br />
Коммерческие риски при несоответствии судна требованиям по подводному шуму <strong>им</strong>еют отношение<br />
и к судовладельцу и к торговому контракту, в котором участвует судно. Риск судовладельца состоит в<br />
незапланированных простоях судна в рамках договора морской перевозки, или в прекращении договорных<br />
отношений с грузовладельцем. Риск владельца груза и держателя коммерческого контракта состоит в<br />
финансовых потерях от санкций за невыполнение условий поставки, или в прекращении контракта.<br />
<strong>Н</strong>аиболее благоприятным и конкурентным является наличие «Сертификата подводного шума судна»<br />
и соответствие судна требованиям порта. Тогда судно может быть использовано в требуемых держателю<br />
коммерческого контракта условиях поставки груза СПГ.<br />
В случае, если судно <strong>им</strong>еет «Сертификат…», но параметры подводной шумности ухудшились, есть<br />
риск задержки времени на портовую обработку судна и претензий со стороны владельца груза. Такое состояние<br />
судна, с точки зрения коммерческого риска судовладельца и владельца груза, может считаться<br />
приемлемым для разовых и срочных поставок.<br />
Отсутствие «Сертификата…» и несоответствие требованиям по подводному шуму ведет к неприемлемым<br />
коммерческ<strong>им</strong> рискам как для судовладельца, так и для владельца груза.<br />
При проектировании и строительстве судов на российских верфях может быть использован огромный<br />
научный, проектный и промышленный потенциал отечественного судостроения в области судовой<br />
акустики. Основными направлениями деятельности в этом направлении являются:<br />
• Разработка вибро-акустических требований на этапе концептуального проектирования судна;<br />
• Контроль качества поставляемого главного и вспомогательного оборудования по шуму и вибрации;<br />
• Пр<strong>им</strong>енение известных и перспективных средств амортизации, виброизоляции и звукоизоляции<br />
судовых машин, механизмов, оборудования и систем, а также судовых средств вибро- и звукопоглощения;<br />
• Акустическое проектирование пропульсивного комплекса судна, в том числе линии валопровода,<br />
гребного винта и подруливающих устройств, архитектура кормовой оконечности в целом;<br />
• Создание и развитие средств измерений, контроля и мониторинга подводного шума коммерческих<br />
судов.<br />
В отличие от практики долговременной акустической доводки кораблей ВМФ, коммерческое судно<br />
такой возможности не дает, поэтому акустическому проектированию и строительству танкеров СПГ<br />
должно уделяться особое вн<strong>им</strong>ание.<br />
Кроме того, <strong>им</strong>еются специализированные дорогостоящие морские суда, напр<strong>им</strong>ер танкеры СПГ. В<br />
отличие от судов для транспортировки массовых грузов, он не может быть оперативно использован в других<br />
сегментах мирового рынка, и коммерческий риск его простоя или вынужденного вывода из эксплуатации<br />
из-за несоответствия перспективным требованиям по подводной шумности, а следовательно – неконкурентоспособности,<br />
представляется очевидным.<br />
В заключение можно сформулировать три основных научно-технических направления, которые<br />
обеспечат экологическое соответствие российских коммерческих транспортных судов перспективным<br />
нормативам по подводному шуму и повышение их коммерческой конкурентоспособности.<br />
• Создание системы проектирования и строительства судов с заданными характеристиками подводного<br />
шума;<br />
• Создание бортовой системы мониторинга вибро-акустического состояния судна;<br />
• Сертификация судов на основании данных, полученных по стандартизованной процедуре измерения<br />
подводного шума с использованием аттестованных средств измерений и анализа.<br />
Л И Т Е Р А Т У Р А<br />
1. ANSI/ASA S12.64-2009/ Part 1 “American National Standard, Quantities and Procedures for Description and Measurement of<br />
Underwater Sound from Ships – Part 1: General Requirements”.<br />
2. Rules for Classification of Ships Newbuildings Special Equipment and Systems Additional Class / Part 6 chapter 24. Det<br />
Norske Veritas.<br />
3. В.И. Таровик, В.А. Калью. «Соответствие танкеров СПГ, построенных на российских верфях, стандартам по подводному<br />
шуму как фактор экологической и коммерческой безопасности». Труды III Международной научно-практической<br />
221
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
конференции «Освоение ресурсов нефти и газа Российского шельфа: Арктика и Дальний Восток». ОАО «Газпром<br />
В<strong>Н</strong>ИИГАЗ». 2010 г.<br />
УДК 681.883<br />
Г.М. Махонин, И.И. Маркович, В.Ю. Дорошенко<br />
ЛОКАЦИЯ <strong>Н</strong>АВИГАЦИО<strong>Н</strong><strong>Н</strong>О ОПАС<strong>Н</strong>ЫХ <strong>Н</strong>ЕРОВ<strong>Н</strong>ОСТЕЙ Д<strong>Н</strong>А<br />
<strong>Н</strong>КБ цифровой обработки сигналов ЮФУ<br />
Россия, 347922, г. Таганрог, Шевченко, 2,<br />
Тел.: (8634) 312-350; Факс: (8634) 315-8411; E-mail: dsp@tsure.ru<br />
В статье рассматриваются вопросы локации препятствия естественного или искусственного происхождения, представляющих<br />
навигационную опасность. Предложены математические модели препятствий. В приближении Кирхгофа получено<br />
выражение для энергии сигнала, обратно рассеянного шероховатой его поверхностью. Рассчитано отношение сигнал/помеха<br />
с учетом влияния ходовых помех и электронных шумов аппаратуры.<br />
<strong>Н</strong>авигационно опасные неровности дна – препятствия, <strong>им</strong>еющие как естественное, так и искусственное<br />
происхождение. Практически во всех случаях они <strong>им</strong>еют сложную, априори неизвестную форму<br />
и рассеивают акустические волны подобно протяженным объектам со стохастически неровной поверхностью.<br />
Механизм отражения акустических волн от таких объектов физически подобен механизму образования<br />
граничной (донной) реверберации, однако, условия формирования сигнала препятствием и поверхностью<br />
дна вне препятствия оказываются существенно различными.<br />
Задача обнаружения таких препятствий физически представляет собой совокупность задач обнаружения<br />
одних случайных процессов (эхосигналов от препятствия или/и от дна вне препятствия) на фоне<br />
других (суммы гидродинамической, шумовой и других помех) и задачи классификации обнаруженных<br />
сигналов на два класса – «препятствие» и «дно». <strong>Н</strong>и общей инженерной методики расчета отношения сигнал/помеха<br />
(ОСП) в этой ситуации, ни частных расчетных формул нет в доступных нам научных публикациях.<br />
Традиционные формулы для расчета реверберационных помех (напр<strong>им</strong>ер, [1, 2, 3]), не могут быть<br />
прямо использованы для таких расчетов, по крайней мере, без их критического осмысления.<br />
Предполож<strong>им</strong>, для определенности, что препятствие представляет собой естественное образование,<br />
подобное холму или протяженному гребню, выступающему из донных осадков. Оно расположено в<br />
зоне ответственности локатора так<strong>им</strong> образом, что при движении носителя без изменения траектории и с<br />
постоянной скоростью существует опасность столкновения с н<strong>им</strong>.<br />
Предполагается, что в локаторе пр<strong>им</strong>еняются раздельные излучающая и приемная антенны,<br />
главные макс<strong>им</strong>умы Д<strong>Н</strong> которых лежат в той же вертикальной плоскости, что и вектор скорости носителя<br />
локатора препятствий. Дистанция обнаружения препятствия должна быть достаточной для маневрирования<br />
с целью предотвращения столкновения с н<strong>им</strong>. В случае пр<strong>им</strong>енения буксируемого носителя или самоходного<br />
подводного аппарата наибольший интерес представляет высота препятствия h, т.к. в этом случае<br />
необход<strong>им</strong>о маневрировать высотой носителя над дном для безопасного преодоления навигационной<br />
опасности.<br />
Простейшей моделью такого препятствия являются три пересекающихся плоскости: две горизонтальных<br />
и одна наклонная. Первая из горизонтальных плоскостей соответствует средней (подстилающей)<br />
поверхности дна, вторая – плоской вершине препятствия, расположенной на высоте h над подстилающей<br />
поверхностью. <strong>Н</strong>аклонная плоскость соответствует склону препятствия.<br />
Z<br />
A<br />
z A<br />
O<br />
θ 1<br />
θ 31<br />
θ 2<br />
∆θ<br />
χ i<br />
r 32<br />
θ пад 31<br />
a<br />
Рис. 1. Модель препятствия в виде плоскостей<br />
Реально поверхность препятствий представляет собой совокупность выступов и впадин, расположенных<br />
случайным образом. Высоты и крутизны этих неровностей также случайны. Практически всегда<br />
можно полагать, что эти неровности статистически однородны и изотропны.<br />
222<br />
r 2<br />
N 33<br />
θ пад2<br />
ξ 2<br />
b<br />
r 30<br />
r 31<br />
ξ 33<br />
h<br />
ξ 32 α<br />
ξ 31<br />
ξ 1<br />
N 32<br />
r N N 31<br />
33 1<br />
θ пад 33<br />
θ пад 32<br />
θ пад 33<br />
N 2<br />
X
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Для локаторов препятствий характерны длины волн порядка 1 см. Можно полагать, что средняя<br />
высота неровностей <strong>им</strong>еет порядок нескольких см и более, крутизна неровностей – единиц-десятков градусов.<br />
При таких параметрах неровностей можно пр<strong>им</strong>енять без ограничений приближение Кирхгофа. В<br />
этом приближении квадрат модуля спектральной плотности сигнала, рассеянного поверхностью, описывается<br />
выражением [4]<br />
где<br />
– спектральная плотность давления эхосигнала в центре приемной апертуры;<br />
– единичная функция Хевисайда; – коэффициент осевой концентрации излучающей антенны;<br />
– протяженность зондирующего сигнала, – приведенная к расстоянию спектральная плотность<br />
давления зондирующего сигнала при ненаправленном излучении; – завис<strong>им</strong>ость коэффициента<br />
обратного рассеяния от угла падения волны на плоскость XOY; – коэффициент поглощения,<br />
, – Д<strong>Н</strong> излучающей и приемной антенн соответственно, – дистанция до препятствия<br />
(1)<br />
, , – координаты центра антенн.<br />
При указанной выше конструкции антенной системы локатора<br />
Численным интегрированием в диапазоне ∆ϕ показано, что функция<br />
, хорошо аппрокс<strong>им</strong>ируется выражением .<br />
Значение определяется выражением<br />
.<br />
, (2)<br />
в котором величина<br />
определяется выражением<br />
где – угол наклона неровностей к XOY.<br />
Коэффициент поглощения определяется известной формулой Марша и Шулькина [3]. Для использования<br />
в (1) она преобразована к виду<br />
где – соленость воды в промилле; – глубина моря; ;<br />
Из (2) видно, что коэффициент обратного рассеяния зависит только от угла падения, следовательно,<br />
формулу (1) можно пр<strong>им</strong>енить при произвольной ориентации плоской шероховатой рассеивающей<br />
поверхности. Для этого поверхность рассеивающего препятствия нужно аппрокс<strong>им</strong>ировать совокупностью<br />
плоскостей, как упомянуто выше.<br />
Основным видом помех являются гидродинамические помехи и электронные шумы аппаратуры.<br />
Спектральная плотность квадрата давления гидродинамических шумов вычисляется по известной формуле<br />
[3]:<br />
где – спектральное (приведенное) значение гидродинамических помех (в полосе<br />
1 Гц на частоте 1 кГц при ненаправленной приемной антенне); – скорость движения носителя; ,<br />
– значения частоты и скорости носителя, при которых производилось измерение (По определению<br />
1/c)<br />
223
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Спектральная плотность мощности электронных (тепловых) шумов определяется известным выражением<br />
где – постоянная Больцмана; – значение абсолютной температуры, при которой<br />
работает аппаратура; – коэффициент шума приемного тракта.<br />
В дальнейших расчетах принято , , соответственно, .<br />
Это значение<br />
эквивалентно действию акустической помехи со спектральной плотностью<br />
,<br />
где<br />
– эквивалентная площадь антенны.<br />
Расчетная формула для суммарной помехи <strong>им</strong>еет вид<br />
Предполож<strong>им</strong>, что в приемном тракте установлен фильтр, согласованный с зондирующ<strong>им</strong> сигналом.<br />
Его функция передачи:<br />
где – константа с размерностью Па; – запаздывание в фильтре.<br />
Энергия сигнала на выходе фильтра<br />
.<br />
с учетом коэффициента осевой концентрации приемной антенны получ<strong>им</strong>:<br />
где – энергия излученного зондирующего сигнала; – квадратичный интервал корреляции<br />
зондирующего, а также рассеянного сигналов.<br />
Дисперсия помехи на выходе согласованного фильтра<br />
,<br />
Поскольку полезный сигнал представляет собой случайный процесс, отношение сигнал/помеха<br />
оценивается по дисперсиям сигнала и помехи:<br />
где<br />
А – постоянная локатора:<br />
где – для простого радио<strong>им</strong>пульса; – для сигнала с прямоугольным спектром.<br />
Условие<br />
этой области<br />
соответствует рассеянию на наклонной поверхности препятствия. В<br />
, .<br />
Из изложенного следует, что полезные сигналы от препятствия (т.е. эхосигналы от его наклонной<br />
поверхности) тем меньше отличаются от донной реверберации, чем более полог<strong>им</strong> является препятствие.<br />
Поэтому необход<strong>им</strong>о установить, при каком на<strong>им</strong>еньшем среднем значении угла α наклона препятствия<br />
оно должно обнаруживаться. То же относится и к среднеквадратичной кривизне неровностей.<br />
В отсутствие этих данных возможно произвести только контрольные расчеты, исходя из общей<br />
концепции и реалистичных сценариев пр<strong>им</strong>енения локатора, используя в качестве исходных данные из<br />
научных публикаций , напр<strong>им</strong>ер [5] и т.п.<br />
При комплексном проектировании удобнее вместо q пользоваться его приведенными значениями<br />
224
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Физически приведение ОСП соответствует случаю, когда полная энергия зондирующего сигнала<br />
равна 1 Дж, а Д<strong>Н</strong> приемной антенны направлена на точку рассеивающей поверхности, расположенную на<br />
расстоянии r от центра антенны. Такая нормировка сокращает трудоемкость перебора вариантов технических<br />
решений при функциональной и параметрической опт<strong>им</strong>изации главных параметров, особенно при<br />
учете плохо формализуемых факторов.<br />
В работе выполнены контрольные расчеты, исходя из общей концепции и реалистичных сценариев<br />
пр<strong>им</strong>енения локатора. Из общих инженерных соображений, в качестве исходных выбраны следующие,<br />
достаточно неблагоприятные данные:<br />
– средний наклон поверхности препятствия (аппрокс<strong>им</strong>ирующей плоскости) α=30°;<br />
– среднеквадратическая величина крутизны неровностей поверхности препятствия<br />
. Это значение выбрано из тех соображений, что вероятные углы наклона неровностей<br />
должны быть, по крайней мере, в 2-3 раза меньше угла наклона α;<br />
– горизонтальное расстояние до нижней точки препятствия x A =150 м;<br />
– препятствие – гранитная скала, ρ 1 =2.8⋅10 3 кг/м 3 , С 1 =3.95⋅10 3 м/с.<br />
– коэффициент поглощения акустических волн в воде рассчитывается для t°=6°C;<br />
– стандартное (приведенное) значение гидродинамического шума P ш (1,1,1) = 0.02 ,<br />
, ;<br />
– центральная частота зондирующих сигналов f 0 =170 кГц;<br />
– ширина спектра зондирующих сигналов ∆f=17 кГц.<br />
Проведенные расчеты показали, что при наиболее неблагоприятном сочетании – z A =10 м, h =10<br />
м и наклоне α = 30° препятствие практически не обнаруживается (µ значительно меньше 1), при z A =20 м,<br />
h =10 м ОСП прин<strong>им</strong>ает значения порядка единицы, а при высоте антенны z A >20 м значения µ многократно<br />
превышают необход<strong>им</strong>ые для надежного обнаружения.<br />
Для препятствия со сложным рельефом аппрокс<strong>им</strong>ация его тремя плоскостями оказывается<br />
слишком грубой и, как упоминалось выше, необход<strong>им</strong>о использовать большее число аппрокс<strong>им</strong>ирующих<br />
плоскостей. Однако, расчеты при этом становятся слишком громоздк<strong>им</strong>и. Для более точных расчетов<br />
может использоваться аппрокс<strong>им</strong>ация поверхности препятствия, напр<strong>им</strong>ер, квадратичной экспонентой.<br />
Модель такого препятствия <strong>им</strong>еет вид:<br />
(3)<br />
где – координаты произвольной точки препятствия; a, b – его параметры; –<br />
координаты вершины препятствия; α 0 – угол, на который оно развернуто относительно выбранного направления.<br />
Такая модель препятствия хорошо соответствует так<strong>им</strong> природным элементам рельефа морского<br />
дна как возвышенности и холмы. Кроме того, она является гладкой функцией, что очень удобно в<br />
математических расчетах, поскольку позволяет пр<strong>им</strong>енять общую для всех участков дна модель рассеяния<br />
сигнала на шероховатой поверхности препятствия. Разработка методики расчета ОСП при модели препятствия<br />
вида (3) требует отдельного рассмотрения и выходит за рамки данной статьи.<br />
Л И Т Е Р А Т У Р А<br />
1. Леонтьев О.К. Дно океана. – М.: Мысль, 1968г.-212 с.<br />
2. Акустика океана/под ред. Бреховских Л.М. – М.: <strong>Н</strong>аука, 1974.-694 с.<br />
3. Клей К., Медвин Г. Акустика океана – М.: Мир, 1980 г.-576 с.<br />
4. Махонин Г.М., Федосов В.П., Черниховская Г.Л. Обнаружение локационных объектов в сложных средах с поглощением.–<br />
Радиотехника, 2006г., №2, с.90-95.<br />
5. Бунчук А.В., Житковский Ю.Ю., Лысанов Ю.П. Особенности обратного рассеяния звука дном банки в открытом океане.<br />
– <strong>Акустический</strong> журнал, 1984 г, т.30 №5, c.599 - 604.<br />
УДК 542.34<br />
Г.М.Махонин, И.И.Маркович, Г.Л.Черниховская, В.Ю.Дорошенко<br />
ОЦЕ<strong>Н</strong>КА ПАРАМЕТРОВ И ФОРМЫ ГИДРОЛОКАЦИО<strong>Н</strong><strong>Н</strong>ЫХ ЦЕЛЕЙ<br />
<strong>Н</strong>КБ цифровой обработки сигналов ФГАОУ ВПО ЮФУ<br />
Россия, 347922 г. Таганрог Ростовской обл., ул. Шевченко, 2<br />
Тел.: (8634) 312-350; Факс: (8634) 315-8411; E-mail: chergl@pbox.ttn.ru<br />
Рассмотрены задачи оценки формы и размеров неподвижных гидролокационных целей, расположенных на дне или в толще<br />
донного грунта. Показано, что оценка формы цели «каноническ<strong>им</strong>и» методами решения обратных задач, использование<br />
225
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
«эхопортретов» и т.п. в этих условиях неработоспособны. Рассматривается метод оценки формы целей, основанный на<br />
теоремах Минковского и его варианты.<br />
Из основных задач гидролокации – обнаружения, определения координат и классификации, наиболее<br />
сложной, при прочих равных условиях, является задача классификации, т.е. задача получения ответа<br />
на вопрос о том, что <strong>им</strong>енно представляет собой обнаруженный объект (цель). В настоящее время возможности<br />
и эффективность классификации гидролокационных объектов существенно ниже требуемых. В<br />
первую очередь это относится к классификации малоразмерных неподвижных объектов искусственного<br />
происхождения. К так<strong>им</strong> объектам относятся, напр<strong>им</strong>ер, «черные ящики», обломки и груз потерпевших<br />
аварию летательных аппаратов, донные мины, затонувшие торпеды, и т. п. В последние годы, в связи с<br />
активизацией мирового терроризма, возросла роль поиска подрывных зарядов, особенно – зарытых в<br />
осадки и предназначенных для нанесения ударов по так<strong>им</strong> объектам, как портовые сооружения, плавучие<br />
атомные электростанции, морские буровые и нефтедобывающие платформы и т.п.<br />
Доказано, что для обнаружения заиленных объектов принципиально необход<strong>им</strong>о пр<strong>им</strong>енение в гидролокаторах<br />
СШП сигналов, т.е. сигналов с коэффициентом широкополосности ν ≥ 1, где , и<br />
– верхняя и нижняя энергетически знач<strong>им</strong>ые частоты спектра.<br />
Локационные свойства СШП сигналов отличаются от традиционных тем сильнее, чем больше ν .<br />
При и свойства СШП сигналов приближаются к свойствам δ-<strong>им</strong>пульса – сигнала, идеального<br />
в смысле разрешения по дальности. При этом появляются, как показано ниже, новые дополнительные<br />
возможности классификации целей, отсутствующие при пр<strong>им</strong>енении обычных сигналов.<br />
В частности, если цель является акустически жестк<strong>им</strong> телом, при облучении ее δ-<strong>им</strong>пульсом появляются<br />
<strong>им</strong>пульсы эхосигналов в моменты касания зондирующ<strong>им</strong> сигналом наиболее близкой и наиболее<br />
далекой точек цели. Интервал времени между эт<strong>им</strong>и <strong>им</strong>пульсами пропорционален продольной протяженности<br />
цели, что можно использовать для оценки ее размеров.<br />
Теоретические исследования разрывных акустических волн [2] показали, что их отражение и преломление,<br />
при поверхностях раздела типа циклид Дюпена, описывается законами лучевой акустики и что<br />
передний фронт эхосигналов <strong>им</strong>еет разрыв того же порядка, что и у падающей волны.<br />
В дальнейших исследованиях установлено:<br />
– лучевое приближение справедливо для описания распространения СШП сигналов типа моноцикла<br />
Гаусса, одного или нескольких периодов синусоидальных колебаний и т.п., а также преломления и отражения<br />
от объектов с кусочно-ляпуновской поверхностью при условии, что достаточно мало отношение<br />
где с 0 – скорость звука в среде, – главные радиусы кривизны отражающей поверхности и ее гауссова<br />
кривизна в точке касания ее передн<strong>им</strong> фронтом падающей волны, – квадратичный интервал корреляции<br />
(корреляционная длительность) сигнала<br />
S(<br />
ω ) – модуль спектральной плотности сигнала;<br />
– форма начального участка СШП эхосигнала практически совпадает с формой зондирующего независ<strong>им</strong>о<br />
от формы отражающего объекта при условии малости (1) (это подтверждено в лабораторных и<br />
натурных экспер<strong>им</strong>ентах). Как показано ниже, на базе этой независ<strong>им</strong>ости могут быть построены новые<br />
эффективные алгоритмы классификации целей.<br />
В настоящее время считается перспективной классификация целей по «эхопортретам» – ее амплитудно-частотным<br />
характеристикам отражения при разных ракурсах. «Эхопортреты» получаются экспер<strong>им</strong>ентально<br />
от образцов искомых целей и используются в качестве эталонов. Однако, возможность пр<strong>им</strong>енения<br />
этого метода для классификации донных или заиленных целей весьма проблематична, поскольку<br />
из-за контакта этих объектов с грунтом происходят неконтролируемые изменения их резонансных характеристик<br />
и нарушается подобие последних эталонам – «эхопортретам».<br />
В связи с эт<strong>им</strong> представляется целесообразным рассмотреть возможность классификации малоразмерных<br />
объектов локации по геометрическ<strong>им</strong> признакам – форме поверхности и, может быть, геометрии<br />
внутренней структуры этих объектов.<br />
Задача определения (реконструкции) формы отражающего объекта по эхосигналам представляет<br />
собой обратную задачу рассеяния математической физики. Этот класс задач хорошо известен, они подробно<br />
рассмотрены в ряде работ, напр<strong>им</strong>ер, [3]. «Канонический» способ решения таких задач – это рекон-<br />
226<br />
(1)<br />
, (2)
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
струкция формы рассеивателя по значениям его комплексной функции рассеяния, полученным при различных<br />
направлениях облучения и отражения сигналов со специальным образом заданными частотами.<br />
При пр<strong>им</strong>енении таких методов необход<strong>им</strong>о, чтобы во время измерений положения излучающей и<br />
приемной антенн определялись в земной (или любой другой абсолютной) системе координат со значительно<br />
меньш<strong>им</strong>и погрешностями, чем допуст<strong>им</strong>ые погрешности реконструкции формы цели, (для малоразмерных<br />
целей это соответствует единицам сант<strong>им</strong>етров).<br />
Такие жесткие точностные требования являются основным недостатком «канонических» методов,<br />
исключающ<strong>им</strong> возможность их практического пр<strong>им</strong>енения в гидролокации, поскольку позиционирование<br />
с такой точностью в морских условиях технически невозможно при современных системах навигации и<br />
стабилизации антенн. Поэтому возникает вопрос о возможности и способах решений обратных задач рассеяния<br />
при неизвестных абсолютных координатах точек излучения и приема (но известном вза<strong>им</strong>ном расположении<br />
излучателя, приемника и объекта в каждом экспер<strong>им</strong>енте).<br />
Положительный ответ о принципиальной возможности решения этой задачи для строго выпуклых<br />
тел дан Минковск<strong>им</strong> [4]. Из его теоремы следует, с учетом (2), что принципиально возможно по результатам<br />
многократной локации цели с достаточно большого числа разных направлений оценить форму цели<br />
(точнее, ее выпуклого приближения). Это возможно и в случае, когда цель погружена в осадки(!).<br />
В [5] показано, что при СШП сигналах спектральная плотность P c ( jω)<br />
давления эхосигнала на его<br />
начальном участке (а для акустически мягкого и акустически жесткого тел –всего сигнала) определяется<br />
выражением<br />
; (3)<br />
центр антенны лежит на оси OZ, – высота центра антенны над дном; – горизонтальный угол на<br />
цель, – угол наклона луча на цель; – расстояние нормировки ( м); – коэффициенты<br />
осевой концентрации;<br />
диаграммы направленности (Д<strong>Н</strong>) излучающей и приемной<br />
антенн соответственно; , – соответственно плотности воды и осадков, ; , –<br />
скорости звука в них; – коэффициент преломления; – приведенная к спектральная плотность<br />
давления ненаправленного излучения; – эквивалентный радиус цели, . –<br />
находится из решения уравнения<br />
, ,<br />
где – горизонтальная дальность до цели, – время запаздывания эхосигнала, – коэффициент<br />
поглощения в грунте:<br />
(4)<br />
– табличное значение коэффициента поглощения в грунте .<br />
Если цель находится на дне, (3) превращается в<br />
(5)<br />
(6)<br />
где .<br />
где , , – координаты точки поверхности цели, ближайшей к центру антенны ГАС; , – коэффициент<br />
поглощения в воде. В соответствии с (5), энергия эхосигнала (его начального участка) определяется<br />
выражением<br />
227
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
, (7)<br />
. (8)<br />
(9)<br />
где .<br />
В (9) входят: известные функции P 0 (ω), γ n (ω), ⏐R и (ω,θ ц ,ϕ ц )⏐, ⏐R nр (ω 1 ,θ ц ,ϕ ц )⏐, измеряемые: расстояние<br />
до цели r и направление на цель – углы θ ц ,ϕ ц . При СШП сигналах член при всех энергетически<br />
знач<strong>им</strong>ых частотах сигнала остается близк<strong>им</strong> к 1. При СШП сигналах с v≤1,6 выражение (8) может без<br />
существенных погрешностей быть заменено приближенным:<br />
где<br />
– энергия излученного сигнала. Тогда<br />
,<br />
(10)<br />
Дисперсия оценки эквивалентного радиуса<br />
(10) в первом приближении определяется выражением<br />
(11)<br />
где , , , , , – дисперсии погрешностей измерения расстояния r, углов θ ц ,ϕ ц , энергии излучения<br />
, энергии эхосигнала , – дисперсия значений поглощения в районе поиска (вычисляются по<br />
табличным данным). Числовые расчеты при реалистичных значениях частных дисперсий, входящих в<br />
(12), показали, что характерное значение лежит в пределах 5 -10% для однократного измерения.<br />
При оценке формы заиленных целей процедура получения искомых оценок существенно усложняется,<br />
в частности из-за невозможности пренебречь поглощением волн в грунте.<br />
Для реконструкции формы цели необход<strong>им</strong>ы значения ее в диапазоне углов ;<br />
, т.е. на всей сфере. Локацию реальной цели можно осуществить только в меньшем интервале<br />
углов, в лучшем случае – в пределах полусферы. Из-за этого оказывается невозможным при априори произвольной<br />
форме цели решить задачу реконструкции. Однако, в ряде случаев возможно задать априори<br />
ожидаемый тип поверхности в виде ее уравнения (с неопределенными коэффициентами) – геометрического<br />
эталона. Тогда задачу реконструкции поверхности можно заменить задачей ее аппрокс<strong>им</strong>ации. Решение<br />
последней сводится к подбору значений коэффициентов уравнения – эталона при которых невязка с экспер<strong>им</strong>ентальными<br />
данными достигает мин<strong>им</strong>ума.<br />
Иногда самостоятельный интерес представляет информация о габаритах цели, ее объеме и т.п. Эти<br />
данные легко получаются из аппрокс<strong>им</strong>ирующего уравнения.<br />
Для оценки формы малоразмерных объектов упомянутого выше вида весьма эффективным оказалось<br />
использование в качестве геометрического эталона так называемого «обобщенного эллипсоида Тихомирова».<br />
Он определяется уравнением<br />
(12)<br />
где , , =1, 2, 3 …<br />
<strong>Н</strong>а рис. 1 приведены пр<strong>им</strong>еры поверхностей, описываемых (15) при различных значениях параметров.<br />
Как следует из изложенного, описанный способ аппрокс<strong>им</strong>ации дает принципиальную возможность<br />
оценивать форму невыпуклых тел, рассматривая их как пересечении нескольких выпуклых и пр<strong>им</strong>еняя к<br />
каждому из них аппрокс<strong>им</strong>ацию обобщенным эллипсоидом. При этом, как следует из изложенного, параметры<br />
этих эллипсоидов вычисляются автоматически, т.е. общая форма цели не задается априори, а «конструируется»<br />
в процессе вычислений. Ограничение объема настоящей статьи не позволяет обсудить эту<br />
тему подробно.<br />
228
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
а) б) в) г)<br />
д) е) ж)<br />
Рис.1. Модели поверхностей, описываемых выражением (12) при различных , :<br />
а) ; б) ; в)<br />
; г) ; д)<br />
; е) ; ж) ;<br />
и) .<br />
Л И Т Е Р А Т У Р А<br />
1. Парламентские слушания «О захоронении х<strong>им</strong>ического оружия в Балтийском море».– Бюллетень «Думское<br />
обозрение» №50 (1204) 13 апреля 2002 г.<br />
2. Фридлендер Ф. Звуковые <strong>им</strong>пульсы/ Пер. с англ. – М.: Издательство иностранной литературы, 1962 г. – 231 с.<br />
3. Колтон Д., Кресс Р. Методы интегральных уравнений в теории рассеяния – М.: Мир, 1987 г.-311 с.<br />
4. Погорелов А.В., Многомерная проблема Минковского.– М.: <strong>Н</strong>аука, 1975 г. - 96 с.<br />
5. Махонин Г.М., Федосов В.П., Черниховская Г.Л. Обнаружение локационных объектов в сложных средах с<br />
поглощением.– Радиотехника, 2006г., №2, с.90-95.<br />
УДК 534.6+519.25<br />
Д.А. Орлов<br />
ОПРЕДЕЛЕ<strong>Н</strong>ИЕ ПОЛОЖЕ<strong>Н</strong>ИЯ <strong>Н</strong>ЕПОДВИЖ<strong>Н</strong>ОГО ГИДРОАКУСТИЧЕСКОГО<br />
ИСТОЧ<strong>Н</strong>ИКА С ПОМОЩЬЮ ДВИЖУЩЕЙСЯ А<strong>Н</strong>ТЕ<strong>Н</strong><strong>Н</strong>ОЙ РЕШЕТКИ<br />
В РЕАЛЬ<strong>Н</strong>ОМ МАСШТАБЕ ВРЕМЕ<strong>Н</strong>И<br />
Институт прикладной физики РА<strong>Н</strong><br />
Россия, 603950 <strong>Н</strong>ижний <strong>Н</strong>овгород, ул. Ульянова, д.46<br />
Тел.: (831) 416-47-74; Факс: (831) 436-59-76<br />
E-mail: denis@hydro.appl.sci-nnov.ru<br />
Разработан и программно реализован алгоритм, позволяющий определять положение источника звука с помощью движущейся<br />
приемной антенной решетки в реальном масштабе времени. При этом рассматривается ситуация, когда источник<br />
может находиться как в дальней, так и в ближней зоне относительно решетки и ее траектории, а параметры источника<br />
– в первую очередь его частотный диапазон – являются неизвестными. В связи с эт<strong>им</strong> предлагается параллельно проводить<br />
как некогерентную, так и когерентную во времени обработку сигнала в заданной полосе частот (ее начальное приближение<br />
задается оператором на основе вывод<strong>им</strong>ой частотно-угловой завис<strong>им</strong>ости). Для когерентной обработки одновременно<br />
с оценкой положения источника необход<strong>им</strong>о проводить оценку частоты сигнала, что приводит к необход<strong>им</strong>ости<br />
расчета целевой функции в завис<strong>им</strong>ости от трех неизвестных параметров, в связи с чем резко возрастает объем требуемых<br />
вычислений. Для опт<strong>им</strong>изации вычислений предложено, в частности, на каждом временном шаге вычислять только<br />
«добавку» к целевой функции для каждого узла сетки параметров, оставляя сетку без изменений. Приведены результаты<br />
пр<strong>им</strong>енения разработанного алгоритма к экспер<strong>им</strong>ентальным данным, показывающие, как положение источника уточняется<br />
по мере движения решетки.<br />
1. Введение. Задаче определения положения источников подводного звука с помощью движущихся<br />
одиночных приемников звука или антенных решеток (АР) был посвящен ряд теоретических и экспери-<br />
и)<br />
229
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
ментальных работ (см., напр<strong>им</strong>ер, [1–4]) 1 . При этом, как правило, рассматривался случай, когда источник<br />
является узкополосным и расположен в дальней зоне синтезированной апертуры (ее размер соответствует<br />
длине траектории), т.е. единственным параметром, который требуется определить, является пеленг источника.<br />
В работах [5, 6] был рассмотрен практически важный случай, когда наряду с пеленгом на источник<br />
должна быть определена и дистанция до него, а также рассмотрен случай широкополосного источника<br />
звука. В настоящей работе задача апертурного синтеза рассмотрена в приложении к реализации соответствующих<br />
методов в реальном масштабе времени, т.е. когда обработка и отображение ее результатов<br />
должны осуществляться непосредственно во время приема сигнала.<br />
2. Когерентный и некогерентный во времени апертурный синтез. Для решения задачи апертурного<br />
синтеза с помощью горизонтальной АР наиболее распространены метод макс<strong>им</strong>ального правдоподобия<br />
(МП) [1] и метод пеленгации на основе «удлинения» буксируемой АР (ETAM – extended towed-array<br />
measurements) [2]. Последний алгоритм использует корреляцию между перекрывающ<strong>им</strong>ися отсчетами<br />
синтезированной и физической решетки для получения фазовой коррекции, которая требуется в первую<br />
очередь для учета деформаций формы АР, характерных для буксируемых решеток. В случае, когда используется<br />
жесткая решетка без деформаций, опт<strong>им</strong>альным является МП-оцениватель, <strong>им</strong>еющий вид<br />
j=<br />
1<br />
2<br />
J<br />
H<br />
F( θ ) = ∑µ j<br />
( θ)<br />
z , (1)<br />
j<br />
где z<br />
j<br />
– временная последовательность N × 1 векторов, представляющих собой комплексные выходные<br />
сигналы на элементах АР после узкополосной фильтрации, µ<br />
j<br />
– модель сигнала, зависящая от вектора неизвестных<br />
параметров θ , (.) H<br />
обозначает эрмитово сопряжение. <strong>Н</strong>абор неизвестных параметров θ включает<br />
координаты источника и, возможно, его частоту. Макс<strong>им</strong>изация (1) по вектору θ дает оценку неизвестных<br />
параметров. Выражение (1) означает когерентную пространственно-временную обработку принятого<br />
сигнала, которая, очевидно, пр<strong>им</strong>ен<strong>им</strong>а только в случае тонального сигнала, т.е. когда полоса излучаемого<br />
сигнала ∆ f , по крайней мере, меньше величины 1/T , где T – полное время наблюдения. Для<br />
случая источника с более широкой полосой был предложен [6] другой подход, когда когерентная обработка<br />
проводится только по пространству:<br />
J<br />
H<br />
2<br />
F( θ ) = ∑ µ<br />
j<br />
( θ)<br />
z . (2)<br />
j<br />
j=<br />
1<br />
Замет<strong>им</strong>, что в обоих случаях предполагается, что ширина полосы анализа ∆ f выбирается такой, чтобы<br />
декорреляцией сигнала на элементах АР можно было пренебречь: ∆ f c/<br />
L , где c – скорость звука,<br />
L<br />
A<br />
– длина АР.<br />
Mодель сигнала для процедур (1) и (2) может быть представлена как<br />
⎧ ρn,<br />
j⎫<br />
µ<br />
j<br />
= exp 2πif<br />
⎨t<br />
j<br />
− ⎬ , (3)<br />
⎩ c ⎭<br />
2 2<br />
( x r t ( y r t ) ) 12<br />
где ( )<br />
ρ<br />
n, j= s− n, x( j) +<br />
s− n,<br />
y( j)<br />
, t<br />
j<br />
– время, соответствующее j-му отсчету, f – частота источника,<br />
xs<br />
, y<br />
s<br />
– декартовы координаты источника, rnx ,<br />
( tj), rny ,<br />
( t<br />
j)<br />
– декартовы координаты x и y, соответственно,<br />
n-го приемнике в момент времени t<br />
j<br />
(предполагается, что движение приемной системы<br />
является прямолинейным и равномерным), c – скорость звука. В модели (3) не учитывается<br />
изменение амплитуды сигнала во время движения в предположении, что источник находится достаточно<br />
далеко от траектории АР.<br />
3. Алгоритм определения положения источника в реальном масштабе времени. Проведение<br />
апертурного синтеза на основе процедур (1) и (2) требует априорной информации о частотных<br />
характеристиках источника: в обоих случаях обработка должна проводиться в полосе, соответствующей<br />
спектру сигнала, а при когерентной во времени обработке (1) требуется также знать точное значение<br />
частоты источника (которая обычно неизвестна) либо вводить ее в вектор неизвестных параметров<br />
θ . Если обработка проводится после получения полной записи сигнала, а строгих ограничений на время<br />
n=<br />
1, N<br />
A<br />
1 Построение и пр<strong>им</strong>енение соответствующих процедур обработки сигнала обычно называют синтезированием<br />
апертуры, или апертурным синтезом.<br />
230
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
обработки не накладывается, эти обстоятельства не приводят к существенным трудностям. В этом случае<br />
может быть проведен предварительный спектральный анализ всей записи сигнала, или же некогерентная<br />
обработка может проводиться в нескольких частотных диапазонах, перекрывающих весь интересующий<br />
частотный диапазон, а поиск частоты для когерентной обработки может осуществляться с малым шагом в<br />
широком диапазоне. Однако эти обстоятельства являются существенными, если локализация источника<br />
должна проводиться в реальном масштабе времени, т.е. непосредственно во время приема сигнала. В общем<br />
случае заранее неизвестно, какая процедура из (1) и (2) является опт<strong>им</strong>альной при данном характере<br />
излучения источника. Если источник является тональным, дополнительную сложность представляет подбор<br />
его частоты, так как когерентная обработка требует точности ее определения порядка тысячных герца<br />
2 , и перебор ее значений в широком диапазоне частот одновременно с поиском координаты требует недопуст<strong>им</strong>о<br />
больших вычислительных ресурсов.<br />
В связи с эт<strong>им</strong> для проведения апертурного синтеза в реальном масштабе времени (с использованием<br />
компьютера с процессором класса Pentium IV) был разработан и программно реализован полуавтоматический<br />
алгоритм. Предполагается, что требуется определить местоположение источника с неизвестным<br />
спектральным составом с помощью горизонтальной АР, движущейся прямолинейно и равномерно вдоль<br />
своей оси. Алгоритм включает следующие этапы:<br />
1. Вывод на экран частотно-угловой завис<strong>им</strong>ости принятого сигнала с грубым частотным разрешением<br />
в полном диапазоне частот работы АР (либо в его выбранном поддиапазоне).<br />
2. Выбор оператором частотного диапазона для некогерентной обработки на основании завис<strong>им</strong>ости,<br />
полученной на этапе 1.<br />
3. Старт некогерентной обработки для выбранного частотного диапазона; отображение результатов<br />
некогерентной обработки.<br />
4. Вывод на экран частотно-угловой завис<strong>им</strong>ости принятого сигнала в диапазоне частот, выбранном<br />
на этапе 2, с более тонк<strong>им</strong> разрешением (с точностью до доплеровского сдвига частоты).<br />
5. Выбор оператором центральной частоты перебора для когерентной обработки на основании завис<strong>им</strong>ости,<br />
полученной на этапе 4, если в ней прослеживается дискретная составляющая.<br />
6. Старт когерентной обработки с поиском по частоте в пределах диапазона, равного удвоенному<br />
доплеровскому сдвигу частоты с центральной частотой, заданной на шаге 5; отображение результатов<br />
когерентной обработки.<br />
Рассмотр<strong>им</strong> перечисленные этапы подробнее. <strong>Н</strong>а этапах 1 и 2 с участием оператора проводится выбор<br />
частотного диапазона для апертурного синтеза. Для этого строится частотно-угловая завис<strong>им</strong>ость<br />
принятого сигнала, которая может быть получена с помощью двойного преобразования Фурье – по времени<br />
и номеру приемного элемента; для понижения уровня боковых лепестков может быть использовано<br />
взвешивающее окно. <strong>Н</strong>а этом этапе полоса анализа не играет существенной роли и для повышения устойчивости<br />
результатов может быть выбрана достаточно широкой (несколько герц) с дополнительным усреднением<br />
полученной завис<strong>им</strong>ости по нескольк<strong>им</strong> временным окнам (обновление отображаемых результатов<br />
происходит раз в несколько секунд). При наличии сигнала от источника и достаточном отношении<br />
сигнал/помеха на завис<strong>им</strong>ости будет прослеживаться отметка, соответствующая этому сигналу (пр<strong>им</strong>еры<br />
см. в следующем разделе); локализация по пеленгу позволяет отделить сигнал от источника от прочих составляющих<br />
акустического поля, прин<strong>им</strong>аемого АР, – в первую очередь собственного шума носителя АР.<br />
Оператор <strong>им</strong>еет возможность непосредственно на отображаемой завис<strong>им</strong>ости выбрать диапазон частот,<br />
относящийся к источнику. <strong>Н</strong>а этапе 3 для выбранного диапазона частот начинает проводиться временная<br />
некогерентная обработка сигнала в соответствии с процедурой (1), в которой вектор неизвестных параметров<br />
θ представляет собой декартовы координаты x, y источника. Результаты отображаются в виде яркостного<br />
графика в завис<strong>им</strong>ости от этих координат. В этом же диапазоне частот на этапе 4 проводится<br />
анализ частотно-угловой завис<strong>им</strong>ости принятого сигнала в более узких полосах: ширина полосы должна<br />
быть выбрана не менее удвоенного макс<strong>им</strong>ального доплеровского сдвига 2 f ( V / c ) , где f – частота, V –<br />
скорость движения АР, c – скорость звука. В случае если в спектре сигнала <strong>им</strong>еется дискретная составляющая,<br />
это позволяет оператору на этапе 5 выделить частоту источника с точностью до доплеровского<br />
сдвига частоты в качестве начального приближения для проведения когерентной обработки 3 . Соответст-<br />
2 <strong>Н</strong>есложно показать, напр<strong>им</strong>ер, что ошибка 0.01 Гц в задании частоты источника с частотой около 1000 Гц<br />
приводит при когерентной обработке к ошибке определения пеленга около 2º.<br />
3 Выделение сигнала от источника по пространственно-частотной завис<strong>им</strong>ости, провод<strong>им</strong>ое оператором на этапах<br />
2 и 5, в принципе, может быть автоматизировано; разработка соответствующего алгоритма представляет<br />
собой отдельную задачу.<br />
231
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
венно, на этапе 6 проводится когерентная обработка в соответствии с процедурой (2), в которой в вектор<br />
неизвестных параметров θ , кроме координат источника, входит и частота; ее поиск проводится в пределах<br />
удвоенного макс<strong>им</strong>ального доплеровского сдвига. Результаты отображаются в виде яркостного графика<br />
в завис<strong>им</strong>ости от декартовых координат x, y для подобранного значения частоты.<br />
Существенным моментом при реализации алгоритма в реальном масштабе времени является необход<strong>им</strong>ость<br />
в каждый момент времени получать новое значение суммы большого числа слагаемых, входящих<br />
в процедуры (1) и (2), для каждого узла сетки неизвестных параметров. Особенно это актуально<br />
для алгоритма (2), в котором в вектор неизвестных параметров входит три параметра: две координаты<br />
и частота. Для опт<strong>им</strong>изации вычислений можно зафиксировать положения узлов сетки и проводить<br />
вычисления итерационным образом: в памяти компьютера постоянно хранятся текущие суммы для<br />
каждой точки сетки, и на каждом шаге вычисляется только добавка к сумме, определяемая последн<strong>им</strong><br />
отсчетом сигнала. Кроме того, расчеты для разных точек сетки могут проводиться параллельно с<br />
использованием многоядерной структуры современных процессоров.<br />
Этапы 3 и 6 продолжают выполняться вплоть до изменения характера движения АР (остановка,<br />
смена скорости или курса) либо до рестарта алгоритма по требованию оператора – напр<strong>им</strong>ер, если требуется<br />
начать слежение за друг<strong>им</strong> источником; так<strong>им</strong> образом, параллельно отображаются результаты как<br />
когерентной во времени, так и некогерентной обработки. Если источник является тональным, его положение<br />
будет определено с помощью обоих методов, причем когерентная обработка даст лучшую точность<br />
определения дистанции [6]; в случае, если временной когерентности сигнала окажется недостаточно (либо<br />
в случае широкополосного источника), локализация будет проводиться только с помощью некогерентной<br />
во времени обработки. Так<strong>им</strong> образом, параллельная обработка с помощью двух различных методов позволяет<br />
проводить локализацию источника с произвольным типом сигнала.<br />
4. Экспер<strong>им</strong>ентальные результаты. В настоящем разделе приводятся некоторые результаты пр<strong>им</strong>енения<br />
предложенного алгоритма к экспер<strong>им</strong>ентальным данным, полученным в ходе экспер<strong>им</strong>ента, проведенного<br />
на Ладожском озере в июле 2010 г. В экспер<strong>им</strong>енте использовалась 32-элементная АР длиной<br />
~6 м, закрепленная вдоль образующей упругой цилиндрической оболочки, моделирующей судноноситель.<br />
Оболочка с АР буксировалась в подводном положении на глубине 5 м с помощью лебедки с<br />
фиксированной скоростью 0.32 м/с. Излучатель, положение которого требовалось определить, помещался<br />
на расстоянии около 120 м от центра траектории движения. Излучались сигналы с различным спектральным<br />
составом. В качестве помехи выступал фоновый шум озера.<br />
<strong>Н</strong>а рис. 1 представлены частотно-угловые завис<strong>им</strong>ости, полученные на этапе 1 представленного алгоритма<br />
для широкополосного и тонального сигналов и на этапе 4 для тонального сигнала. Можно видеть<br />
хорошо локализованные по пеленгу и по частоте отметки, соответствующие сигналу от источника, которые<br />
позволяют оператору указать частотные диапазоны для проведения апертурного синтеза.<br />
<strong>Н</strong>а рис. 2 в качестве пр<strong>им</strong>ера показаны выходы процедур (1) и (2) (т.е. полученные на этапах 3 и 6<br />
алгоритма, соответственно) – оцененные координаты тонального источника в неподвижной декартовой<br />
системе координат – после прохождения АР дистанций около 30 и 100 м. АР двигалась по оси x против ее<br />
направления, начиная с координаты x = 100 м. Можно видеть, как положение источника уточняется по<br />
(а) (б) (в)<br />
Рис. 1. Частотно-угловые завис<strong>им</strong>ости принятого сигнала: (а) с грубым частотным разрешением для широкополосного<br />
сигнала; (б) с грубым частотным разрешением и (в) с тонк<strong>им</strong> частотным разрешением для тонального<br />
сигнала с частотой около 1500 Гц.<br />
232
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
(а) (б) (в) (г)<br />
Рис. 2. Результаты определения положения тонального источника частотой около 1500 Гц в реальном масштабе<br />
времени после прохождения антенной решеткой дистанции (а), (б) – 30 м, (в), (г) – 100 м; (а), (в) – результаты<br />
некогерентной во времени обработки; (б), (г) – результаты когерентной во времени обработки.<br />
мере движения АР. Также можно видеть, что когерентная во времени обработка для тонального источника<br />
дает более точную оценку положения источника, чем некогерентная обработка.<br />
5. Заключение. В работе предложен алгоритм, позволяющий провести определение положения неподвижного<br />
источника звука с неизвестным спектральным составом с помощью движущейся горизонтальной<br />
антенной решетки в реальном масштабе времени. Представлены результаты пр<strong>им</strong>енения алгоритма<br />
к экспер<strong>им</strong>ентальным гидроакустическ<strong>им</strong> данным, полученным в озерных условиях.<br />
Л И Т Е Р А Т У Р А<br />
1. Stergiopoulos S., Sullivan E.J. Extended towed array processing by an overlap correlator // J. Acoust. Soc. Am. – 1989. –<br />
V. 86. – №. 1. – P. 158–171.<br />
2. Nutall A.H. The maximum likelihood estimator for acoustic synthetic aperture processing // IEEE J. Ocean. Eng. – 1992. –<br />
V. 17. – №. 1. – P. 26–29.<br />
3. Yen N.-C., Carey W. Application of synthetic-aperture processing to towed-array data // J. Acoust. Soc. Am. – 1989. – V. 86. –<br />
№. 2. – P. 754–765.<br />
4. Дашевский О.Ю., <strong>Н</strong>ежевенко Е.С. Исследование влияния мешающих факторов на качество синтезирования апертуры в<br />
гидролокации // Автометрия. – 2008. – Т. 44. – №. 2. – С. 76–90.<br />
5. Иваненков А.С., Коротин П.И., Орлов Д.А., Родионов А.А., Турчин В.И. Пеленгация источников тонального сигнала с<br />
использованием движущихся приемных антенных решеток // Гидроакустика. – 2011 (принято к публикации).<br />
6. Ivanenkov A.S., Korotin P.I., Orlov D.A., Rodionov A.A., Turchin V.I. Localization of a narrowband source using a moving horizontal<br />
array: Experimental results // Proceedings of Forum Acusticum 2011 (Aalborg, Denmark, 2011) (принято к<br />
публикации).<br />
УДК 534.61+519.25<br />
В.В.Артельный, П.В.Артельный, П.И.Коротин, А.А.Родионов, В.И.Турчин<br />
ЭКСПЕРИМЕ<strong>Н</strong>ТАЛЬ<strong>Н</strong>ОЕ ИССЛЕДОВА<strong>Н</strong>ИЕ ЛОКАЛИЗАЦИИ<br />
ИСТОЧ<strong>Н</strong>ИКА ЗВУКА В СЛУЧАЕ ДВИЖЕ<strong>Н</strong>ИЯ ПРИЕМ<strong>Н</strong>ОЙ СИСТЕМЫ<br />
ПО ПРОИЗВОЛЬ<strong>Н</strong>ОЙ ЗАМК<strong>Н</strong>УТОЙ ТРАЕКТОРИИ<br />
Институт прикладной физики РА<strong>Н</strong><br />
Россия, 603950 <strong>Н</strong>ижний <strong>Н</strong>овгород, ул. Ульянова, д.46<br />
Тел.: (831) 416-47-74; Факс: (831) 436-59-76<br />
E-mail: alexr@hydro.appl.sci-nnov.ru<br />
Экспер<strong>им</strong>ентально исследована задача локализации источника звука методом пассивного апертурного синтеза для случая<br />
движения приемной антенной решетки (АР) по произвольной замкнутой траектории. Принципиальным моментом при ее<br />
решении является использование специальных средств буксировки АР в подводном положении и соответствующего навигационного<br />
оборудования. В отсутствие таких технических средств предложено <strong>им</strong>итировать движение АР движением<br />
источника вокруг неподвижной АР. Для определения траектории источника предложен оригинальный подход, основанный<br />
на использовании фаз принятых сигналов на специальной реперной частоте, излучаемой движущемся источником вместе с<br />
«полезным» сигналом. Полученная траектория использовалась далее для локализации источника полезного сигнала методом<br />
апертурного синтеза.<br />
Использование прямолинейного движения антенной решетки (АР) для определения местоположения<br />
тонального источника звука методом пассивного апертурного синтеза <strong>им</strong>еет существенный недоста-<br />
233
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
ток: если частота источника неизвестна, точность определения пеленга практически не улучшается [1,2].<br />
Этого недостатка можно избежать, используя движение АР по окружности [1], либо замкнутой кривой<br />
достаточно произвольного вида. Экспер<strong>им</strong>ентально это было продемонстрировано в [3], однако без детального<br />
анализа возможностей такого подхода. Исследования в этом направлении представляют значительный<br />
практический интерес, поскольку можно существенно повысить точность пеленгации, используя<br />
достаточно простой маневр – циркуляцию корабля, несущего АР; при этом траектория движения АР может<br />
быть определена с требуемой точностью современными навигационными системами.<br />
Экспер<strong>им</strong>ентальные исследования такого способа без корабельного обеспечения представляют, однако,<br />
значительные трудности. Во-первых, достаточно сложно, напр<strong>им</strong>ер, с помощью катера выполнять<br />
буксировку АР в подводном положении. Во-вторых, использование в качестве навигационного средства<br />
обычного GPS не дает нужной точности. В настоящей работе представлены возможные способы обхода<br />
этих трудностей в процессе экспер<strong>им</strong>ентальных исследований.<br />
Рассмотр<strong>им</strong> движение АР по касательной к окружности радиуса r<br />
0<br />
; источник расположен на расстоянии<br />
R<br />
0<br />
под углом ϕ к оси x – см. рис. 1а. Текущее расстояние Lt () между центральным элементом<br />
АР и источником в этом случае есть<br />
2 2<br />
Lt () = R0 −2Rr 0 0cos( Ωt− ϕ)<br />
+ r0<br />
,<br />
где<br />
2π<br />
Ω= , T – время прохождения траектории. <strong>Н</strong>етрудно показать, однако, что точно такая же завис<strong>им</strong>ость<br />
текущего расстояния от времени будет <strong>им</strong>еть место для движения источника по окружности радиу-<br />
T<br />
са R<br />
0<br />
при неподвижном источнике, сдвинутом относительно начала координат на расстояние r<br />
0<br />
под углом<br />
ϕ – см. рис. 1б. Обе геометрии неразлич<strong>им</strong>ы в экспер<strong>им</strong>енте, и можно буксировать излучатель относительно<br />
неподвижной АР, что значительно проще технически. Естественно, что при движении катера<br />
невозможно точно выдержать заданную траекторию, однако равенство текущих расстояний Lt () сохраняется<br />
и при сравнительно небольших отклонениях от окружности: кругообразная траектория, характеризуемая<br />
переменным радиусом Rt (), преобразуется в траекторию rt () путем решения квадратного уравнения<br />
– см. рис. 1.<br />
Далее, для точного позиционирования текущего положения излучателя в рамках схемы на рис. 1б,<br />
может быть использована завис<strong>им</strong>ость прин<strong>им</strong>аемой фазы от времени, если в спектре сигнала источника<br />
содержится сигнал с заведомо известной стабильной частотой. Техника преобразования экспер<strong>им</strong>ентальной<br />
фазовой завис<strong>им</strong>ости в траекторию движения источника приводится ниже. Экспер<strong>им</strong>ент выполнялся<br />
на акватории Ладожского озера при глубине места ~20 м с двумя антенными решетками длиной 12 м, установленными<br />
на глубине ~10 м. Пьезокерамический излучатель буксировался катером на расстоянии<br />
~80 м от места установки антенн. Излучались одновременно несколько тональных сигналов на частотах<br />
262.51, 525.02, 787.53 Гц. Цель экспер<strong>им</strong>ента заключалась в сопоставлении теоретических функций неопределенности<br />
в плоскости «частота-пеленг» и реально получаемых при оценке частоты и пеленга по экспер<strong>им</strong>ентальным<br />
данным.<br />
Рис. 1. Схемы экспер<strong>им</strong>ента с движением приемника по окружности радиуса r<br />
0<br />
относительно источника на расстоянии<br />
R<br />
0<br />
(а) и с движением по окружности радиуса R<br />
0<br />
источника относительно источника, смещенного на<br />
расстояние r<br />
0<br />
относительно начала координат; источник и приемник обозначены звездочкой и кружком соответственно,<br />
АР – жирной линией; сплошные линии – эквивалентные возмущенные траектории.<br />
234
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
1. Методика определения траектории по фазовой завис<strong>им</strong>ости сигнала. Предполагалось, что в<br />
условиях распространения звука в горизонтальной плоскости, близких к свободному пространству, фаза<br />
прин<strong>им</strong>аемого сигнала от источника Φ()<br />
t на известной опорной частоте связана с текущ<strong>им</strong> расстоянием<br />
Lt () между приемником и источником простейш<strong>им</strong> соотношением: Φ () t = 2 π f L()/<br />
t c, где c – средняя<br />
0<br />
скорость звука; на основе этого соотношения и определялась траектория источника для геометрии экспер<strong>им</strong>ента,<br />
представленного на рис. 1б. Временная завис<strong>им</strong>ость дистанции L () t между движущ<strong>им</strong>ся источником<br />
и n-м гидрофоном может быть представлена в следующем виде:<br />
n<br />
L ( t) = r + R −2r R cos( Ωt −ϕ ) + a ( t) + 2 a ( t) R −r cos( Ωt−ϕ ) +<br />
n<br />
( 2 2 2<br />
0 0 0 0 0 0 0 0<br />
( )<br />
( )) 12<br />
+ 2zn<br />
r0cos( ϕ−β) − ( R0 + a0( t))cos( Ωt−β ) ,<br />
где a0() t = R()<br />
t − R0– отклонение траектории от окружности, β – угол наклона АР относительно оси x,<br />
zn<br />
= ( n− ( N + 1) 2)<br />
d – координаты гидрофонов вдоль АР. Для условий реального экспер<strong>им</strong>ента, который<br />
проводился на Ладожском озере, с хорошей точностью можно использовать следующее приближение:<br />
2 2 2<br />
rn<br />
() t ≈ r0 + R0 −2r0R0cos( Ωt −ϕ ) + a0() t + 2 a0() t ( R0 −r0cos( Ωt−ϕ ))<br />
+ zn<br />
cos( Ωt−β<br />
)<br />
представляя модель сигнала с n-го гидрофона в виде:<br />
sn() t = exp { ik0<br />
( R() t + zncos( Ωt<br />
−β ))}<br />
, (1)<br />
где k<br />
0<br />
– волновое число. <strong>Н</strong>а основе (1) с помощью пространственного когерентного накопления сигнала,<br />
принятого гидрофонами yn<br />
() t можно определить параметр β :<br />
Рис. 2. Временные завис<strong>им</strong>ости развернутой фазы принятого сигнала для всех гидрофонов до компенсации фазы<br />
(слева) и после (справа) для опорной частоты 787.53 Гц.<br />
Рис. 3. Траектория, восстановленная по временной<br />
завис<strong>им</strong>ости развернутой фазы принятого<br />
сигнала на опорной частоте 787.53 Гц (пунктирная<br />
линия). Траектория по данным GPS (сплошная<br />
линия).<br />
235<br />
T N<br />
2<br />
ˆ 0 n cos( )<br />
arg max ( ) − ik z Ωt<br />
−β<br />
β= ∑ n<br />
β<br />
0 n=<br />
1<br />
∫ y t e dt . (2)<br />
После определения β принятый сигнал удобно преобразовать<br />
к чисто временному виду с помощь компенсации<br />
фазовых задержек на отдельных гидрофонах:<br />
N<br />
1<br />
−ik ˆ<br />
0zn<br />
cos( Ω−β t )<br />
yt ˆ( ) = ∑ yn<br />
() te . <strong>Н</strong>а рис. 2 в качестве иллюстрации<br />
такого преобразования приведены временные<br />
N n=<br />
1<br />
завис<strong>им</strong>ости развернутой фазы принятого сигнала для<br />
всех гидрофонов до компенсации фазы и после. Видно,<br />
что после компенсации фазы со всех гидрофонов собрались<br />
в одну общую завис<strong>им</strong>ость (отклонения в конечном<br />
участке завис<strong>им</strong>ости связаны с неоднозначностью<br />
фазы, которую не смог полностью устранить алгоритм<br />
разворота).<br />
После накопления сигналов с различных гидрофонов<br />
можно переходить к нахождению требуемой завис<strong>им</strong>о-
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
сти a () 0<br />
t . Для этого воспользуемся фазовой завис<strong>им</strong>остью Φ()<br />
t сигнала yt ˆ( ), которую можно получить с<br />
помощью процедуры развертывания фазы. Очевидно, что данная завис<strong>им</strong>ость в идеальных условиях<br />
должна удовлетворять следующему уравнению:<br />
( Φ ( t) k ) 2 2 2 2<br />
0<br />
+ C0 = r0 + R0 −2r0R0cos( Ωt−ϕ ) + a0( t) + 2 a0( t) ( R0 −r0cos( Ωt−ϕ ))<br />
, (3)<br />
где C<br />
0<br />
– некоторая действительная константа (она здесь необход<strong>им</strong>а, поскольку фаза Φ () t определяется с<br />
точностью до константы). Из этого уравнения очевидным образом выражается a 0<br />
() t :<br />
( ) ( ) 2 2 2<br />
a0() t =− R0 −r0cos( Ωt −ϕ ) + Φ () t k0 + C0 −r0<br />
sin ( Ωt−ϕ ). (4)<br />
Трудность, здесь заключается в том, что неизвестны также, по крайней мере, три параметра: r 0<br />
, ϕ , C<br />
0<br />
( R<br />
0<br />
предполагалось пр<strong>им</strong>ерно известным). Для нахождения этих параметров и одновременного определения<br />
a () t потребуем, чтобы квадратичная норма 0<br />
a () 0<br />
t была мин<strong>им</strong>альной. Это требование логично, если считать<br />
a () 0<br />
t небольш<strong>им</strong> случайным отклонением траектории от окружности. Так<strong>им</strong> образом, с помощью<br />
мин<strong>им</strong>изации величины<br />
T<br />
2<br />
∫ a0(, t r0, ϕ, C0)<br />
dt находятся параметры ϕ ,<br />
0<br />
0<br />
r , C<br />
0<br />
, и, главное, величина a 0<br />
() t . Замет<strong>им</strong>,<br />
что фактически с помощью этой процедуры однозначно вводится система координат, поскольку<br />
при произвольном выборе ϕ , r , 0<br />
C<br />
0<br />
, с помощью (4) всегда можно найти функцию a () t , удовлетворяющую<br />
уравнению (3), то есть, произвол при выборе положения антенной решетки можно компенсировать<br />
0<br />
произволом выбора a () 0<br />
t . <strong>Н</strong>а рис.3 показана найденная траектория движения излучателя; там же показана<br />
оценка его траектории по данным GPS; как следует из рис.3, отклонение между эт<strong>им</strong>и оценками траектории<br />
вполне соответствует точности GPS.<br />
2. Сопоставление функций неопределенности. <strong>Н</strong>а рис. 4 показаны теоретическая (слева) и экспер<strong>им</strong>ентальная<br />
(справа) функции неопределенности частота/пеленг для частоты 525.02 Гц. Видно, что<br />
Рис. 4. Теоретическая (слева) и экспер<strong>им</strong>ентальная (справа) функции неопределенности частота/пеленг для частоты<br />
525.02 Гц.<br />
источник уверенно локализуется, а функции неопределенности <strong>им</strong>еют сходную форму. Это говорит об<br />
адекватности используемой для апертурного синтеза модели траектории и метода её определения, а также<br />
показывает перспективность предложенного метода экспер<strong>им</strong>ентального исследования апертурного синтеза<br />
для произвольных замкнутых траекторий.<br />
3. Выводы. В работе рассмотрена схема экспер<strong>им</strong>ентального исследования метода апертурного<br />
синтеза для случая, когда приемная система движется относительно источника по произвольной замкнутой<br />
траектории. Предложено использовать движение источника вместо движения приемной системы. Показана<br />
возможность преобразования одного движения в другое. Приведены результаты экспер<strong>им</strong>ента,<br />
проведенного в озерных условиях, показывающие возможность и перспективность пр<strong>им</strong>енения предложенного<br />
метода.<br />
Л И Т Е Р А Т У Р А<br />
1. Иваненков А.С., Коротин П.И., Орлов Д.А., Родионов А.А., Турчин В.И. Пеленгация источников тонального сигнала с<br />
помощью движущейся антенной решетки // Гидроакустика. – 2011 (в печати).<br />
2. Edelson G.S., Tufts D.W. On the ability to estimate narrow-band signal parameters using towed arrays // IEEE J. Ocean. Eng. –<br />
1992. – V. 17. – № 1. – P. 48–61.<br />
3. D’Spain G.L., Terrill E., Chadwell C.D., Smith J.A., Lynch S.D. Active control of passive acoustic fields: Passive synthetic aperture/Doppler<br />
beamforming with data from an autonomous vehicle // J. Acoust. Soc. Am. – 2006. – V. 120. – №. 6. – P. 3635–<br />
3654.<br />
236
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
УДК 681.883<br />
П.А. Волков, А.В. Кирьянов<br />
ЭКСПЕРИМЕ<strong>Н</strong>ТАЛЬ<strong>Н</strong>ОЕ ИССЛЕДОВА<strong>Н</strong>ИЕ ДИАГРАММ <strong>Н</strong>АПРАВЛЕ<strong>Н</strong><strong>Н</strong>ОСТИ<br />
МАСЛО<strong>Н</strong>АПОЛ<strong>Н</strong>Е<strong>Н</strong><strong>Н</strong>ОЙ ЛИ<strong>Н</strong>ЗОВОЙ А<strong>Н</strong>ТЕ<strong>Н</strong><strong>Н</strong>Ы<br />
ГОУ ВПО «Дальневосточный государственный технический университет<br />
(ДВПИ <strong>им</strong>. В.В. Куйбышева)»<br />
Россия , 690950 г. Владивосток, ул. Пушкинская,10<br />
Тел.: (4232) 450982; E-mail: volkk100@mail.ru<br />
В работе рассматриваются практические проблемы синтеза фокусирующих систем, методы исследований базируются на<br />
математическом аппарате теории функций Грина для волновых уравнений. Описывается несколько возможных конструкций<br />
линзовых антенн. Теоретические расчеты и численные экспер<strong>им</strong>енты приведены в работах [1-3], в статье описывается<br />
экспер<strong>им</strong>ентальная проверка рассчитанных антенн.<br />
Синтез волновых полей является одной из актуальных прикладных задач физики, так как часто возникает<br />
необход<strong>им</strong>ость синтеза антенн внутри и вне замкнутых объемов (областей) в океанологии, подводной и<br />
подземной связи.<br />
Под волновыми полями пон<strong>им</strong>аются поля, которые с достаточной степенью точности можно описать<br />
с помощью волновых уравнений. В настоящей работе рассматриваются акустические поля с гармонической<br />
завис<strong>им</strong>остью от времени.<br />
Практические проблемы, которые могут привести к задачам синтеза фокусирующих систем, состоят<br />
в следующем. Требуется сфокусировать звуковое поле в небольшом объеме. При этом надлежит заранее<br />
удовлетворять требования по форме и распределению интенсивности в фокальном объеме. <strong>Н</strong>еобход<strong>им</strong>о<br />
сконструировать линзу или рефлектор, которые с заданной погрешностью создадут нужное поле<br />
вблизи с фокальной областью на поверхности.<br />
Линзовая антенна – антенна, диаграмма направленности которой формируется за счёт разности<br />
фазовых скоростей распространения акустической волны в воде и в материале линзы.<br />
Под задачами синтеза пон<strong>им</strong>аются задачи конструирования антенн исходя из известных значений<br />
создаваемого волнового поля. Существуют следующие типы акустических антенных систем: вибраторные<br />
антенны, щелевые антенны, апертурные антенны, непрерывные, дискретные и линзовые системы. Для<br />
целей нашего исследования представляют интерес линзовые антенны.<br />
Для рассматриваемой физической модели предложена адекватная ей математическая модель, основанная<br />
на методе функций Грина и обобщенных законах отражения и преломления сферических волн от<br />
криволинейной границы раздела двух сред. Основные уравнения и расчет линзовой антенны приводятся<br />
в работах [1-2]. В данной статье экспер<strong>им</strong>ентально исследуются антенны, разработанные методами, приведёнными<br />
в работе [3].<br />
Измерения проводились в гидроакустическом бассейне в <strong>им</strong>пульсном реж<strong>им</strong>е с использованием<br />
временной селекции прямого и отраженного сигналов. Временная селекция сигналов позволяет регистрировать<br />
только прямой сигнал. Для отраженных сигналов, время прихода которых больше, чем по прямому<br />
пути, схема закрыта (Рисунок 1):<br />
Рис. 1. Блок-схема установки<br />
1 – излучатель, 2 – приемник, 3 – измерительный гидроакустический бассейн, 4 – генератор, 5 – <strong>им</strong>пульсный<br />
генератор, 6 – усилитель мощности, 7 – временной селектор, 8 – усилитель напряжения,<br />
9 – осциллограф<br />
Технические характеристики излучателя определяются при исследовании акустических свойств<br />
измерительного бассейна.<br />
В качестве приемника акустических колебаний используются базы, набранные из пьезокерамики.<br />
Пр<strong>им</strong>енение их диктуется высокой чувствительностью получения различных комбинаций антенны за счет<br />
237
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
раздельного включения отдельных элементов, <strong>им</strong>еющих самостоятельный вывод на переключатель типа<br />
баз.<br />
При выполнении данной работы рассматривалась сферическая линзовая антенна диаметром 30 см<br />
с размещением в ней одиночного излучателя. Излучатель крепится на гибкой подводке, что позволяет менять<br />
его положение в антенне. Оболочка изготовлены из резины. Измерения проводились в воде ρ в = 1000<br />
кг/м 3 – плотность воды, С в = 1500 м/с – скорость звука в воде. Для наполнителя линзы использовалось<br />
машинное масло GS Oil SuperDynamic 15w40 со следующ<strong>им</strong>и параметрами ρ м = 879 кг/м 3 – плотность<br />
масла, С м = 1340 м/с – скорость звука и силиконовый герметик следующ<strong>им</strong>и параметрами ρ м = 1100 кг/м 3<br />
– плотность масла, С м = 1440 м/с – скорость звука<br />
В качестве одиночного излучателя пр<strong>им</strong>енялся сферический излучатель рабочей частотой 80 кГц.<br />
Снятие характеристик проводилось для трёх позиций излучателя внутри сферы.<br />
Антенна представляет собой шар выполненный из резины, заполненный машинным маслом. В<br />
центр шара помешался точечный акустический излучатель сферических волн на гибкой подводке. Вся<br />
конструкция погружалась в воду в заглушенный бассейн. Антенну поворачивали вокруг оси крепления, с<br />
углом поворота 5 градусов. Для каждой фиксированной точки были сняты характеристики излучающего<br />
поля.<br />
Рис. 2. Конструкция антенны<br />
Экспер<strong>им</strong>ент проводился для трех разных точек расположения излучателя внутри сферической<br />
оболочки: 1 точка – в центре сферы, 2 точка – на расстояние 2/3 от границы, 3 точка – возле границы. Расстояние<br />
между приемником и излучателем составляло 6 м, что соответствует излучению в дальнем поле<br />
(Рисунки 3, 4, ).<br />
Рис. 3. Диаграмма направленности линзовой антенны. Излучатель находиться на расстоянии 2/3 от центра.<br />
Частота излучения 60 кГц: а) диаграмма направленности, полученная в расчетах; б) диаграмма направленности,<br />
полученная а экспер<strong>им</strong>енте.<br />
Рис. 4. Диаграмма направленности линзовой антенны. Излучатель находиться на расстоянии 2/3 от центр.<br />
Частота излучения 120 кГц : а) диаграмма направленности, полученная в расчетах; б) диаграмма<br />
направленности, полученная в экспер<strong>им</strong>енте.<br />
238
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
В ходе экспер<strong>им</strong>ента было доказано, что при смещении излучателя к границам сферической оболочки,<br />
диаграмма направленности сужается, и уменьшаются боковые лепестки, что качественно совпадает<br />
с теоретическ<strong>им</strong>и методами нахождения поля линзовых антенн. Погрешность измерения в основном лепестке<br />
составляет 6 %, а в боковых – 30%.. В расчетах не учитывались затухание акустических волн в среде<br />
и отражение их от границ раздела двух сред.<br />
Л И Т Е Р А Т У Р А<br />
1. Короченцев, В.И. Волновые задачи теории направленных и фокусирующих антенн / В.И. Короченцев. – Владивосток:<br />
Изд-во Дальнаука, 1998. −192 с.<br />
2. Короченцев, В.И. <strong>Н</strong>екоторые возможности метода синтеза антенн в неоднородных средах / В.И. Короченцев, С.А. Шевкун<br />
// Проблемы и методы разработки и эксплуатации вооружений и военной техники ВМФ : сборник статей. Специальные<br />
вопросы прикладной гидроакустики. − Владивосток: Изд-во ТОВМИ <strong>им</strong>. С.О. Макарова, 2001. − C. 173–175.<br />
3. Короченцев В.И. Расчет поля точечного излучателя, расположенного в замкнутом объеме / В.И. Короченцев, С.А. Шевкун<br />
// Доклады IX научной школы-семинара <strong>академика</strong> Л.М. Бреховских «Акустика океана», совмещенной с XII сессией<br />
Российского акустического общества. – М.: ГЕОС, 2002. – С. 152–156.<br />
УДК 534.26<br />
Ю.А. Половинка<br />
ВАРИА<strong>Н</strong>Т РАСЧЕТА ВЕРТИКАЛЬ<strong>Н</strong>ОГО ПРОФИЛЯ СКОРОСТИ ЗВУКА<br />
(ТЕМПЕРАТУРЫ) ПО РЕЗУЛЬТАТАМ ИМПУЛЬС<strong>Н</strong>ОГО ЗО<strong>Н</strong>ДИРОВА<strong>Н</strong>ИЯ <strong>Н</strong>А<br />
СТАЦИО<strong>Н</strong>АР<strong>Н</strong>ОЙ ТРАССЕ В МЕЛКОМ МОРЕ<br />
x 10 -3<br />
3.5<br />
3<br />
2.5<br />
Kcorr<br />
2<br />
1.5<br />
1<br />
0.5<br />
Тихоокеанский океанологический <strong>институт</strong> <strong>им</strong>. В. И. Ильичева ДВО РА<strong>Н</strong><br />
Россия, 690041 Владивосток, ул. Балтийская, 43<br />
Тел.+7(4232) 31-14-00; Факс +7(4232) 31-25-73; e-mail: yrivlad@poi.dvo.ru<br />
В работе рассматривается возможность измерения и мониторинга во времени вертикального профиля скорости звука<br />
(температуры) в мелководных акваториях по результатам <strong>им</strong>пульсного зондирования на стационарной трассе. Схема<br />
измерений включает использование синхронизированных во времени приемоизлучающих акустических систем и численных<br />
расчетов в среде программирования MathLab. Численное моделирование распространения звука для условий экспер<strong>им</strong>ента<br />
является составной частью методики расчетов, позволяя реализовать схему измерений и обеспечить их высокую точность.<br />
Известные методы акустической томографии для восстановления профиля скорости звука в глубоком<br />
океане [1], становятся в ряде случаев непр<strong>им</strong>ен<strong>им</strong>ыми для условий мелкого моря. Это происходит<br />
вследствие отсутствия технической возможности разделить различные по путям распространения и близкие<br />
по временам прихода собственные лучи в функции отклика акустического канала [2]. В тоже время,<br />
активное освоение и использование биологических, минеральных и технологических ресурсов внутренних<br />
водоемов, прибрежного шельфа, бухт, заливов и проливов, требует создания современных систем измерения<br />
и мониторинга параметров среды указанных объектов[3-5].<br />
17h(max)<br />
22h(min)<br />
04h(max)<br />
08h(min)<br />
0<br />
0.4 0.405 0.41 0.415 0.42 0.425<br />
Время прихода, с<br />
Рис. 1. Функции отклика акустического канала, измеренные<br />
на стационарных трассах в Корейском проливе.<br />
239<br />
1525,5 1526,5 1527,5 1528,5 1529,5 1530,5 C, m/c<br />
0<br />
2<br />
4<br />
6<br />
8<br />
H, m<br />
Рис. 2. Базовые профили скорости звука<br />
для четырех времен экспер<strong>им</strong>ента.<br />
17h(max)<br />
22h(min)<br />
04h(min)<br />
08h(min)<br />
В докладе [6] представлены результаты экспер<strong>им</strong>ентальных исследований и численного моделирования<br />
распространения акустических сигналов на стационарных трассах в бухте Витязь залива Петра<br />
Великого и в Корейском проливе Восточного моря. Показано, что когерентность функции отклика звукового<br />
канала сохраняется до уровня 95% в течении одного часа и на уровне 85% - не менее 15 часов наблюдений.<br />
Указанные результаты свидетельствуют о высокой временной стабильности распределения скоро-
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
сти звука вдоль трасс акустических измерений. Рассматриваемая методика определения профиля<br />
скорости звука и температуры основана на предположении их малых отклонений от измеренного базового<br />
профиля в течение времени наблюдений. <strong>Н</strong>а рис.1, в качестве пр<strong>им</strong>ера, приведены функции отклика акустического<br />
канала для четырех характерных времен (макс<strong>им</strong>умы и мин<strong>им</strong>умы прилива) для экспер<strong>им</strong>ента<br />
в Корейском проливе. Для случая, представленного на рис.1, базовые профили скорости звука измерялись<br />
в течение экспер<strong>им</strong>ента с периодичностью один час. <strong>Н</strong>а рис.2. изображены профили скорости звука, соответствующие<br />
по времени, приведенным на рис.2. функциям отклика акустического канала.<br />
Макс<strong>им</strong>альная дисперсия скорости звука на поверхности в период экспер<strong>им</strong>ента составляла 4.5м/с, на<br />
глубине от 2-х до 4-х метров – 2м/с и на глубине от 4-х до 10 метров около 1,5м/с. Численное моделирование,<br />
в рамках лучевого подхода, позволяет идентифицировать основные группы собственных лучей для<br />
функций отклика звукового канала. В таблице 1 приведены параметры кластеров по времени прихода, углам<br />
выхода и длине траекторий лучей для экспер<strong>им</strong>ента в Корейском проливе.<br />
Таблица 1. Параметры групп лучей для кластеров в рассчитанной численно ФОК (дистанция 614.3м, время<br />
измерений 08 часов 16 сентября 2010 года).<br />
<strong>Н</strong>омер кластера Времена прихода,<br />
Углы выхода, Число отражений<br />
Число отражений<br />
Длина траекторий<br />
с<br />
Град<br />
от поверх-<br />
ности<br />
от<br />
дна лучей, м<br />
1 -19 0,4 – 0,41 -6 +5 0 - 13 1 - 13 614,4 – 625,5<br />
20 - 33 0,41 -0,424 -6-11; +5+10 13 - 23 13 - 24 625,5 – 645,0<br />
34 - 43 0,424 – 0,436 -11-13; 10+12 24 - 29 24 - 29 >645<br />
<strong>Н</strong>а рис. 3 и рис. 4 приведены пр<strong>им</strong>еры рассчитанных траекторий для 1-го и 20 кластеров собственных лучей<br />
и изменение длины этих траекторий в пределах указанных кластеров.<br />
(а)<br />
(б)<br />
2<br />
3<br />
1-группа<br />
-0,92-0,99 град<br />
08 часов<br />
0<br />
1<br />
2<br />
Глубина, м<br />
4<br />
5<br />
6<br />
Глубина, м<br />
3<br />
4<br />
5<br />
6<br />
2 группа<br />
+6,2+6,3 град<br />
08 часов<br />
7<br />
Длина луча, м<br />
8<br />
0 100 200 300 400 500 600<br />
Дистанция, м<br />
614.7<br />
614.6<br />
614.5<br />
614.4<br />
614.3<br />
1 группа<br />
-0,92-0,99 град<br />
08 часов<br />
614.2<br />
-0.99 -0.98 -0.97 -0.96 -0.95 -0.94 -0.93 -0.92<br />
Угол выхода, град<br />
7<br />
8<br />
Длина луча, м<br />
0 100 200 300 400 500 600<br />
Дистанция, м<br />
Рис. 3. Траектории собственных лучей для 1-го кластера из 1-й группы собственных лучей – (а) и для 20-го кластера<br />
из 2-й группы лучей рассчитанные для стационарной акустической трассы в Корейском проливе.<br />
(а)<br />
625.8<br />
625.7<br />
625.6<br />
625.5<br />
625.4<br />
625.3<br />
625.2<br />
625.1<br />
2 группа<br />
+6,2+6,3 град<br />
08 часов<br />
625<br />
6.2 6.22 6.24 6.26 6.28 6.3<br />
Углы выхода, град<br />
Рис. 4. Длина траекторий собственных лучей для 1-го кластера из 1-й группы собственных лучей – (а) и для 20-<br />
го кластера из 2-й группы лучей для стационарной акустической трассы в Корейском проливе.<br />
(б)<br />
240
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Горизонтальная дистанция стационарно установленных на небольшой глубине источников и приемников<br />
акустических, может быть определена с высокой точностью как по данным системы GPS, так и<br />
по измерениям дистанции измерителями дальности в пределах прямой вид<strong>им</strong>ости. Для трассы в Корейском<br />
проливе, горизонтальная дистанция акустической трассы по данным GPS составляла 614.3м. Длина<br />
траекторий собственных лучей больше горизонтальной дистанции 614.3м, между источником и приемником<br />
звука и их разность соответственно для мин<strong>им</strong>ума и макс<strong>им</strong>ума в группе равна - 0.1-0.4м для первой<br />
группы лучей; 10.8-11.4м - для двадцатой группы лучей; 30.2-30.9м - для 32 группы лучей.<br />
Абсолютное время между моментом излучения сигнала акустическ<strong>им</strong> излучателем и моментами<br />
приема каждого из серии <strong>им</strong>пульсных сигналов гидрофоном в экспер<strong>им</strong>енте - τ<br />
i<br />
, соответствует временам<br />
распространения акустического сигнала вдоль траекторий различных групп собственных лучей. При этом<br />
средние скорости V τ распространения <strong>им</strong>пульсных акустических сигналов по горизонтальной дистанции<br />
i<br />
D ⊥ SR на поверхности моря, между проекциями излучателя и приемника, находящихся на дне в экспер<strong>им</strong>енте,<br />
будут равны:<br />
D<br />
=<br />
SR<br />
(1)<br />
V τ i<br />
⊥<br />
τ i<br />
Средние скорости распространения акустических сигналов между источником и приемником вдоль траекторий<br />
собственных лучей V при моделировании, равны:<br />
r i<br />
D<br />
ri<br />
Vr<br />
= (2)<br />
i<br />
τ<br />
i<br />
Условие, при котором ≅<br />
i SR и<br />
i<br />
Dr<br />
D ⊥<br />
Vτ ≅ Vr i<br />
может выполняться только для первой группы приходов в<br />
условиях «прямой вид<strong>им</strong>ости», на небольших дистанциях при незначительной рефракции лучей. В общем<br />
случае Dr<br />
> D<br />
i ⊥ SR и Vr > i<br />
V τ , что отражено в таблице 2 для условий рассматриваемого экспер<strong>им</strong>ента.<br />
i<br />
Значение средней скорости вдоль траекторий собственных лучей может быть вычислено по формуле:<br />
N<br />
∑Cr<br />
(<br />
i)<br />
n<br />
n=<br />
1<br />
V r = i N<br />
(3)<br />
где - Cr ( i<br />
) n<br />
значения скорости звука в среде распространения в точках n вдоль i-й траектории собственных<br />
лучей. Формула (3), и ее модификации для конкретных схем измерений и пространственных распределений<br />
поля скорости звука, используется для расчета локальных значений скорости звука<br />
Cr ( i) = Cx ( i, yi)<br />
.<br />
Таблица 2. Идентификация собственных лучей, длины траекторий и рассчитанные средние скорости звука<br />
вдоль траекторий для четырех времен измерений (результаты моделирования).<br />
<strong>Н</strong>омеда,<br />
Ns Nb Угол выхо-<br />
Угол входа, Время Ампли-<br />
Длина Скорость Время<br />
град град прихода, с туда траекто-<br />
звука, м изме-<br />
группы<br />
рии, м<br />
рений,<br />
час<br />
1 0 3 -0,795-0,74 -5,47-5,29 0,40220 3,66E-05 614,60 1528,10 17<br />
1 1 2 1,579 +1,57 -1,3916 0,40190 2,43E-05 614,80 1529,73 22<br />
1 0 2 -0,795-0,74 -1,3565 0,40240 2,73E-04 614,65 1527,46 4<br />
1 0 2-5 -0,92 -0,99 -1,17-0,23 0,40245 3,60E-04 614,54 1527,00 8<br />
20 10 9 -7,50 -7,90 -13,19 0,40760 4,17E-04 622,40 1526,99 17<br />
20 11 10 -6,6916 +13,4428 0,40720 5,16E-05 622,50 1528,73 22<br />
20 10 10 -6,735-6,775 -13,03+12,87 0,40770 5,72E-05 622,75 1527,47 4<br />
19 13 13 +6,2+ 6,3 15,13 0,40939 6,50E-04 625,40 1527,64 8<br />
В рассматриваемом случае, для акустической трассы с диапазоном глубин 3-8м и при отношении h/D от<br />
0.005 до 0,013 можно выделить три характерных значения локальной скорости звука: скорость звука на<br />
поверхности ho=0м – C0, скорость звука на глубине приемника hr~3м – Сr и скорость звука на глубине<br />
излучателя hS~8м – Cs. В рамках точности акустических измерений, скорость звука и глубина по измеренным<br />
временам первых приходов (геометрия рис.3а) могут быть рассчитаны по простым формулам:<br />
241
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
V<br />
τ1<br />
D<br />
=<br />
τ1<br />
τ<br />
1<br />
;<br />
( Cs<br />
+ Cr<br />
)<br />
Ch<br />
≡ V<br />
1 τ 1<br />
= ;<br />
2<br />
( hs<br />
+ hr<br />
)<br />
h1<br />
= (4)<br />
2<br />
Для следующих приходов, расчет соответствия средних скоростей распространения (времен приходов)<br />
значениям скорости звука по глубине в вертикальном распределении, можно проводить на этапе моделирования<br />
выполняя поиск:<br />
N<br />
∑<br />
Cr (<br />
i)<br />
n<br />
n=<br />
1<br />
V r ≡ =<br />
i<br />
C0( hk<br />
)<br />
(5)<br />
N<br />
где C0(hk) – значения скорости звука по глубине при моделировании или измеренные значения скорости<br />
звука на начало экспер<strong>им</strong>ента. Адекватность восстановления профиля скорости звука по данным измерения<br />
времен приходов будет сохраняться на временах высокой когерентности ФОК и малых отклонений<br />
профиля скорости звука от начального значения, используемого при моделировании. Вычисление вертикального<br />
распределения температуры производится по измеренным значениям скорости звука, глубины и,<br />
в общем случае, солености в районе измерений. <strong>Н</strong>а рис.5. приведены результаты контактных измерений<br />
вертикального профиля температуры в районе экспер<strong>им</strong>ента и значения температуры, рассчитанные по<br />
данным дистанционного акустического зондирования.<br />
25,4<br />
T(H0),<br />
град<br />
T(H3),<br />
град<br />
T, град<br />
24,9<br />
24,4<br />
23,9<br />
T(H4),<br />
град<br />
T(H5),<br />
град<br />
T(H8),<br />
град<br />
1-й<br />
приход<br />
20-й<br />
приход<br />
23,4<br />
0 2 4 6 8 10 12 14 16 Время, час<br />
Рис. 5. Измеренные локально и рассчитанные по данным дистанционного акустического зондирования значения<br />
температуры на различных глубинах в Корейском проливе.<br />
Температура, определяемая по первому приходу ФОК, соответствует измеренной на глубине ~5м, что<br />
следует из формулы (4). Температура, определяемая по 20 приходу 2-й группы, соответствует глубине 3-<br />
3,5м, что меньше значения на поверхности и больше, чем на глубине 4м.<br />
Работа выполнена с частичной поддержкой РФФИ (проект 09-05-00074-а) и гранта Президента<br />
РФ для поддержки научных школ (<strong>Н</strong>Ш-3641.2010.5).<br />
Л И Т Е Р А Т У Р А<br />
1. Munk W., P. Worcester, and Wunsch C. Ocean Acoustic Tomography // Cambridge Monographs on Mechanics, New York, USA,<br />
1995.<br />
2. Rodriguez O.C., Jesus S.M. Physical limitations of travel-time-based shallow water tomography // J. Acoust. Soc. Amer. 2000.<br />
V.6. No 108. P. 2816–2822.<br />
3. Acoustic Sensing Techniques for the Shallow Water Environment. Inversion Methods and Experiments. Edited by A.Caiti, N. R.<br />
Chapman, J.-P. Hermand, S. M. Jesus // Published by Springer, Netherlands 2006. 328p.<br />
4. Akulichev V.A., Bezotvetnykh V.V., Burenin A.V., Voytenko E.A., Kamenev S.I., Morgunov Yu.N., Polovinka Yu.A., Strobikin<br />
D.S. Remote Acoustic Sensing Methods for Studies in Oсeаnology // Ocean Science Journal, Vol. 41 No 2, p.105-111 (2006).<br />
5. Акуличев В.А., Буренин А.В., Войтенко Е.А., Каменев С.И., Моргунов Ю.<strong>Н</strong>., Половинка Ю.А., Стробыкин Д.С., Безответных<br />
В.В. Развитие дистанционных методов и средств исследований в океанологии // Дальневосточные моря России. М.:<br />
<strong>Н</strong>аука, 2007. Кн. 4: Физические методы исследования. с.71-86.<br />
6. Моргунов Ю.<strong>Н</strong>., Половинка Ю.А., Стробыкин Д.С., Азаров А.А., Лебедев М.С. Экспер<strong>им</strong>ентальные исследования и численное<br />
моделирование функции отклика акустических канала в мелководных бухтах // (ibid).<br />
242
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
УДК 534.26<br />
Ю.<strong>Н</strong>. Моргунов, Ю.А. Половинка, Д.С. Стробыкин, А.А. Азаров, М.С. Лебедев<br />
ЭКСПЕРИМЕ<strong>Н</strong>ТАЛЬ<strong>Н</strong>ЫЕ ИССЛЕДОВА<strong>Н</strong>ИЯ И ЧИСЛЕ<strong>Н</strong><strong>Н</strong>ОЕ МОДЕЛИРОВА<strong>Н</strong>ИЕ<br />
ФУ<strong>Н</strong>КЦИИ ОТКЛИКА АКУСТИЧЕСКИХ КА<strong>Н</strong>АЛОВ В МЕЛКОВОД<strong>Н</strong>ЫХ БУХТАХ<br />
Тихоокеанский океанологический <strong>институт</strong> <strong>им</strong>. В. И. Ильичева ДВО РА<strong>Н</strong><br />
Россия, 690041 Владивосток, ул. Балтийская, 43<br />
Тел.+7(4232) 31-14-00; Факс +7(4232) 31-25-73; e-mail: yrivlad@poi.dvo.ru<br />
В работе приведены результаты измерений функций отклика акустического канала для условий, установленных вблизи<br />
дна, излучателей и гидрофонов. Измерения проводились в бухте Витязь и на акватории Корейского пролива Восточного<br />
моря между островами Чеджу-до и <strong>Н</strong>орёк-до. Численное моделирование функций отклика проводилось по данным бат<strong>им</strong>етрических,<br />
гидрологических и гидроакустических измерений в районах экспер<strong>им</strong>ентов. Полученные результаты использованы<br />
при создании аппаратно-программной системы измерений и расчета профиля скорости звука (температуры) в<br />
мелководных акваториях на базе стационарно установленных акустических излучателей и приемников <strong>им</strong>пульсных сигналов.<br />
Комплексные экспер<strong>им</strong>ентальные акустико-гидрологические исследования распространения звука<br />
в бухте Витязь и в Корейском проливе вблизи острова <strong>Н</strong>орёк-до были проведены в июле и в сентябре<br />
2010 года, соответственно. Акустические измерения включали в себя излучение сложных (модулируемых<br />
м-последовательностями) <strong>им</strong>пульсных сигналов, а также прием сигналов стационарными приемными<br />
системами. В период проведения акустического экспер<strong>им</strong>ента на полигонах выполнялись пространственно-временные<br />
измерения гидрологических параметров водной среды. Основной целью работ было получение<br />
экспер<strong>им</strong>ентальных данных для разработки методик акустического мониторинга распределения<br />
скорости звука (температуры) и вариаций уровня водной поверхности в мелководных акваториях. В предлагаемом<br />
докладе анализируются результаты численного моделирования функции отклика звукового канала<br />
в условиях малых глубин и их адекватность результатам экспер<strong>им</strong>ентов. Также анализируются условия<br />
распространения сигналов, с точки зрения устойчивости функций отклика акустических каналов во<br />
времени. Карты-схемы стационарно установленных излучателей и приемных систем, а также станций полигонных<br />
измерений гидрологических параметров и суточных станции измерений вертикального распределения<br />
гидрологических параметров для рассматриваемых экспер<strong>им</strong>ентов, приведены на рис.1.<br />
(а)<br />
(б)<br />
Рис.1. Схемы экспер<strong>им</strong>ентов: (а) - б. Витязь, (б) – Корейский пролив. Красные кружки, прямоугольники и ромб<br />
– положение стационарных излучателей и приемников акустических сигналов. Зеленые и синие кружки, желтый<br />
и красный ромб – положения гидрологических станций на полигонных съемках и на суточных станциях,<br />
соответственно.<br />
Дистанция и макс<strong>им</strong>альная глубина вдоль трасс в бухте Витязь были порядка 1750м и 40м, соответственно.<br />
Длина и макс<strong>им</strong>альная глубина трассы в Корейском проливе <strong>им</strong>ели величины 614м и 8м. В<br />
первом случае отношение D/h~0.023, во втором случае D/h~0.013. Частота акустических сигналов в обоих<br />
случаях была 2500Гц. Измеренные, в течении времени экспер<strong>им</strong>ентов, функции отклика акустических каналов<br />
для трасс в б. Витязь и в Корейском проливе совместно с синхронными суточными измерениями<br />
гидрологических параметров приведены на рис.2 и 3.<br />
Создание акустических систем для мониторинга профиля скорости звука, температуры и теплосодержания,<br />
приливных вариаций уровня и скорости течений базируется на анализе времен распространения<br />
<strong>им</strong>пульсов в функции отклика канала. Это возможно при адекватном численном моделировании<br />
243
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
(расчете времен прихода по параметрам среды и технической схеме измерений), в предположении малых<br />
вариаций локальной скорости звука в среде и при высокой когерентности функции отклика канала во<br />
времени.<br />
Рис. 2. Вариации профиля скорости звука и времен прихода лучей (функции отклика акустического канала)<br />
для экспер<strong>им</strong>ента в б.Витязь.<br />
Рис. 3. Вариации профиля скорости звука и времен прихода лучей (функции отклика акустического канала)<br />
для экспер<strong>им</strong>ента в Корейском проливе<br />
244
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
<strong>Н</strong>а рис.4 представлены результаты сравнения измеренной и рассчитанной функции отклика акустического<br />
канала для экспер<strong>им</strong>ента в Корейском проливе.<br />
Параметры группы собственных лучей для кластеров в рассчитанной численно ФОК рис.4 представлены<br />
в таблице 1.<br />
Таблица 1. Параметры групп лучей для кластеров в рассчитанной численно ФОК.<br />
<strong>Н</strong>омер кластера<br />
Времена прихода,<br />
с<br />
Углы выхода,<br />
Град<br />
Число отражений<br />
от поверхности<br />
Число отражений<br />
от дна<br />
Длина траекторий<br />
лучей, м<br />
1 -19 0,4 – 0,408 -6 +5 0 – 13 1 - 13 614,4 – 625,5<br />
Отличия измеренной экспер<strong>им</strong>ентально и рассчитанной ФОК (рис.4) состоит в более высоком<br />
«разрешении» по времени отдельных макс<strong>им</strong>умов в моделируемой ФОК. В тоже время, практически все<br />
рассчитанные собственные лучи проявляются на измеренной ФОК в виде нарушения с<strong>им</strong>метрии локальных<br />
макс<strong>им</strong>умов. Хорошее совпадение рассчитанных и измеренных ФОК свидетельствует о адекватности<br />
численной модели провод<strong>им</strong>ому экспер<strong>им</strong>енту в терминах времен распространения. Адекватность результатов<br />
моделирования амплитуд приходящих собственных лучей можно только оценить по анализу их количества<br />
на интервале времени и при корректном учете потерь при отражениях на границах. Если возможность<br />
корректного решения прямой задачи распространения для условий экспер<strong>им</strong>ентов является<br />
2<br />
1.8<br />
1.6<br />
1.4<br />
1.2<br />
1<br />
0.8<br />
0.6<br />
x 10 -3<br />
0.4<br />
0.2<br />
08h<br />
0<br />
0.401 0.402 0.403 0.404 0.405 0.406 0.407 0.408<br />
7:06<br />
8:06<br />
0.401 0.402 0.403 0.404 0.405 0.406 0.407 0.408<br />
7<br />
6<br />
5<br />
4<br />
A<br />
3<br />
Source Angles, grad<br />
2<br />
1<br />
0<br />
401 402 403 404 405 406 407 408<br />
4<br />
Time, ms<br />
2<br />
0<br />
-2<br />
-4<br />
-6<br />
1<br />
1.5<br />
2<br />
401 402 403 404 405 406 407 408<br />
Time, ms<br />
Рис. 4. Измеренная в экспер<strong>им</strong>енте и рассчитанная численно функция отклика акустического канала<br />
для экспер<strong>им</strong>ента в Корейском проливе (гидрология -16.09.2010-08:00)<br />
245
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
«достаточным» условием для идентификации приходов в экспер<strong>им</strong>енте и расчете по эт<strong>им</strong> данным вертикального<br />
профиля скорости звука по трассе, то для мониторинга во времени изменений профиля скорости<br />
звука «необход<strong>им</strong>ым» условием будет высокая корреляция экспер<strong>им</strong>ентальных ФОК на интервале времени<br />
наблюдений.<br />
<strong>Н</strong>а рис.5. приведен пр<strong>им</strong>ер корреляционного анализа измеренных в экспер<strong>им</strong>ентах ФОК. Дискретность<br />
излучаемых <strong>им</strong>пульсных сигналов всегда составляла 1<strong>им</strong>п/мин.<br />
Основными выводами из корреляционного анализа экспер<strong>им</strong>ентальных ФОК является: 1 - 95% когерентность<br />
ФОК на интервалах времени до 3600с, 2 - когерентность ФОК не ниже 85% на суточных интервалах<br />
наблюдений, 3 – увеличение коэффициента корреляции при использовании опт<strong>им</strong>ального времени<br />
анализа и 4 – <strong>им</strong>еется возможность отслеживать низкочастотный тренд ФОК во времени по динамике<br />
макс<strong>им</strong>ума коэффициента корреляции.<br />
(а)<br />
(б)<br />
1<br />
0.9<br />
0.8<br />
08 часов<br />
1<br />
0.99<br />
17h<br />
08h<br />
22h<br />
04h<br />
0.7<br />
0.6<br />
0.98<br />
0.5<br />
Kcorr<br />
0.4<br />
0.97<br />
0.3<br />
0.2<br />
0.96<br />
0.1<br />
0<br />
50 100 150 200 250 300 350 400 450 500<br />
0.95<br />
10 20 30 40 50 60<br />
Время, мин<br />
(в)<br />
(г)<br />
Kcorr<br />
1<br />
0.98<br />
0.96<br />
0.94<br />
0.92<br />
0.9<br />
0.4c<br />
0.0927c<br />
0.0223c<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
Tmc, mc<br />
0<br />
-0.2<br />
Tmc 0.4c<br />
5th degree<br />
Tmc 0.0928c<br />
Tmc 0.0232c<br />
0.88<br />
-0.4<br />
0.86<br />
0.84<br />
0 100 200 300 400 500 600 700 800 900<br />
Время, мин<br />
-0.6<br />
-0.8<br />
-1<br />
0 100 200 300 400 500 600 700 800 900<br />
Рис. 5. Ансамбли корреляционных функций–(а), коэффициенты корреляции ФОК для четырех времен экспер<strong>им</strong>ента<br />
-(б), коэффициенты корреляции ФОК (относительно ФОК 17 часов) в течение всего экспер<strong>им</strong>ента–(в),<br />
динамика макс<strong>им</strong>умов функции корреляции для трех временных интервалов анализа ФОК и огибающая «опт<strong>им</strong>ального»<br />
временного интервала анализа 0,0232с-(г) для экспер<strong>им</strong>ента в Корейском проливе.<br />
Работа выполнена с частичной поддержкой РФФИ (проект 09-05-00074-а) и гранта Президента<br />
РФ для поддержки научных школ (<strong>Н</strong>Ш-3641.2010.5).<br />
Л И Т Е Р А Т У Р А<br />
1. Половинка Ю.А. Вариант расчета вертикального профиля скорости звука (температуры) по результатам <strong>им</strong>пульсного<br />
зондирования на стационарной трассе в мелком море // (ibid).<br />
Time, min<br />
246
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
УДК 534-143<br />
А.А. Стромков, А.А. Луньков*<br />
ОБ ЭКСПЕРИМЕ<strong>Н</strong>ТАЛЬ<strong>Н</strong>ЫХ И ЧИСЛЕ<strong>Н</strong><strong>Н</strong>ЫХ ОЦЕ<strong>Н</strong>КАХ ЭФФЕКТИВ<strong>Н</strong>ОСТИ<br />
ФОКУСИРОВКИ ОБРАЩЕ<strong>Н</strong>ИЕМ ВРЕМЕ<strong>Н</strong>И В МЕЛКОМ МОРЕ В ПРИСУТСТВИИ<br />
СЛУЧАЙ<strong>Н</strong>ЫХ ФЛУКТУАЦИЙ<br />
Институт прикладной физики РА<strong>Н</strong><br />
Россия, 603950 <strong>Н</strong>ижний <strong>Н</strong>овгород, ул. Ульянова, д.46<br />
Тел. (831) 436-7293; Факс: (831) 436-5976; E-mail: stromkov@hydro.appl.sci-nnov.ru<br />
*<strong>Н</strong>аучный центр волновых исследований Института общей физики <strong>им</strong>. А.М. Прохорова РА<strong>Н</strong><br />
Россия, 119991 Москва, ул. Вавилова, д. 38<br />
Тел.: (499) 503-8384; Факс: (499) 135-8234; E-mail: landr2004@mail.ru<br />
В последние годы проводятся активные исследования метода временного обращения волн (ВОВ или TRM – time-reversal<br />
mirror). Метод может повысить эффективность гидроакустических систем в условиях неоднородных, но стационарных<br />
волноводов. Вместе с тем важно оценить устойчивость метода к воздействию различных нестационарных процессов,<br />
таких как поверхностное волнение, внутренние волны, приливные колебания и др. Экспер<strong>им</strong>ентальные оценки требуют<br />
долговременных измерений, охватывающих периоды с разной амплитудой флуктуаций и позволяющих проводить корректное<br />
сравнение результатов измерений. Обработка архивных данных в большинстве случаев невозможна, поскольку отсутствовали<br />
экспер<strong>им</strong>енты с одновременной регистрацией гидрометеорологической информации. Численное моделирование «в<br />
лоб» требует привлечения больших вычислительных мощностей, что не всегда возможно. В работе рассматриваются<br />
подходы, позволяющие не проводить долговременных экспер<strong>им</strong>ентов, а использовать короткие измерения в разные периоды<br />
времени в контролируемых и повторяющихся условиях. Предлагаются быстрые алгоритмы численного моделирования с<br />
использованием косвенных экспер<strong>им</strong>ентальных данных. Приведены первые результаты экспер<strong>им</strong>ентов и численного моделирования.<br />
Введение<br />
Океанский шельф представляет собой в настоящее время наиболее знач<strong>им</strong>ую часть океана в экономическом,<br />
политическом и научном плане. Вместе с тем он доставляет значительные сложности в плане исследования.<br />
Акустика является единственным средством контроля и мониторинга толщи океана, при этом<br />
даже в однородном мелководном океане распространение звука обладает значительной дисперсией, что<br />
приводит к усложнению, а зачастую и к невозможности выполнения результативной обработки сигналов.<br />
<strong>Н</strong>аличие отражений от неровных границ и локальных отражателей только усугубляют ситуацию. Поэтому<br />
создание эффективных гидроакустических систем наталкивается на значительные трудности. Одно время<br />
большие надежды возлагались на согласованную со средой обработку [1]. Однако отсутствие адекватной<br />
информации о среде не позволяло добиться требуемой эффективности.<br />
В последнее десятилетие акустике обращения времени [2,3] (или TRA - Time-Reversed Acoustics) в<br />
гидроакустике посвящено много публикаций в научной литературе. Достаточно широко обсуждаются<br />
возможности пр<strong>им</strong>енения TRA в медицине и задачах передачи информации. Все основные полезные свойства<br />
систем временного обращения волн или ВОВ (TRM – Time-Reversal Mirror) проявляются в фокальном<br />
пятне, находящемся в точке расположения пробного источника (ПИ). В этой точке происходит компенсация<br />
времени запаздывания различных мод или лучей, приводящая к когерентному их сложению, в то<br />
время как в остальных точках пространства происходит некогерентное сложение. Разница уровней когерентного<br />
и некогерентного сложения определяет эффективность фокусировки обращением времени. Очевидно,<br />
что чем больше лучей или мод, тем эффективней работает временное обращение, то есть, чем<br />
сложнее среда распространения, тем лучше. Так<strong>им</strong> образом, мелководные акватории мирового океана могут<br />
быть той средой, в которой использование ВОВ может быть особенно полезно. Тем более что эффективность<br />
ВОВ в мелководных волноводах может достигать еще больших значений за счет компенсации<br />
внутр<strong>им</strong>одовой дисперсии.<br />
Все вышесказанное о ВОВ относится к стационарным средам. Однако океанические среды характеризуются<br />
наличием нестационарных флуктуаций различной природы, которые могут разрушать фокусировку<br />
и снижать её эффективность. Эти факторы являются основными причинами, не позволяющ<strong>им</strong>и достичь<br />
макс<strong>им</strong>ально возможной эффективности различным методам обработки сигналов, в частности это относится<br />
и к ВОВ. Можно выделить несколько типов флуктуаций разных временных масштабов, влияние которых<br />
на ВОВ различно [4]. <strong>Н</strong>апр<strong>им</strong>ер, пространственная неоднородность показателя преломления является<br />
фактором, обеспечивающ<strong>им</strong> особый характер фокусировки ВОВ в океане и в частности в мелком море.<br />
В случае горизонтально однородного волновода эффективность фокусировки определяется не столько<br />
вертикальными размерами антенны, сколько числом мод и лучей, распространяющихся в волноводе. Благодаря<br />
этому при определенных условиях, налагаемых на зондирующий сигнал, удается сфокусировать<br />
даже одиночный источник или приемник. <strong>Н</strong>еоднородность по трассе распространения при этом является<br />
247
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
скорее положительным, чем отрицательным фактором. Фокусировка вблизи пробного источника (ПИ)<br />
наблюдается и в этом случае, поскольку для ВОВ характерно повышение эффективности при усложнении<br />
среды распространения.<br />
Рассеяние дном (реверберация) в соответствии с канонической моделью является стационарным и обладает<br />
корреляционной функцией пропорциональной корреляционной функции зондирующего сигнала.<br />
При этом полагается, что благодаря ВОВ можно существенно снизить реверберационную помеху [5]. Однако<br />
это верно в отсутствии факторов нестационарности (внутренние волны, поверхностное волнение и<br />
др.). Кроме того, большинство пр<strong>им</strong>енений ВОВ требует использования <strong>им</strong>пульсных широкополосных<br />
сигналов, для которых статистика реверберации может отличаться от канонической. При этом происходит<br />
стохастизация сигнала донной реверберации и согласованный с сигналом фильтр уже не выделяет реверберацию<br />
так же как отраженный сигнал от локальных рассеивателей. Исходя из этого следует, что ВОВ за<br />
счет пространственной фокусировки не может обеспечивать эффективное подавление реверберации, а<br />
только лишь усиление сигнала ПИ. В литературе приводятся цифры подавления реверберации порядка 3<br />
дБ, при этом эффективность ВОВ никак не ниже 9дБ [6].<br />
В то же время поверхностное волнение представляет собой нестационарный процесс, поэтому оно<br />
может существенно уменьшать эффективность ВОВ.<br />
Рассеяние на ЗРС можно отнести к нарушению пространственной неоднородности, которое к тому же<br />
обладает определенной временной изменчивостью, что также может приводить к ухудшению фокусировки.<br />
Движение источников или приемников приводит к тому, что фокальное пятно может перемещаться и<br />
разрушаться в завис<strong>им</strong>ости от параметров движения.<br />
Сюда можно отнести и приливы различной природы, внутренние волны и т.п. Все это приводит к необход<strong>им</strong>ости<br />
выполнения теоретических, модельных и экспер<strong>им</strong>ентальных исследований, позволяющих<br />
получать адекватные оценки эффективности работы гидроакустических систем с ВОВ в реальных условиях.<br />
Сравнение численного моделирования и экспер<strong>им</strong>ентальных исследований<br />
Теоретические исследования, особенно на основе фундаментальных теорий, адекватно предсказывают<br />
отдельные механизмы вза<strong>им</strong>одействия акустического сигнала со средой. Вместе с тем, в реальной среде<br />
вза<strong>им</strong>одействие звука и среды описывается множеством теоретических моделей, распределенных как в<br />
пространстве, так и во времени. Поэтому для расчетов характеристик гидроакустических систем требуется<br />
построение численных моделей, учитывающих теоретические модели и реальные параметры среды. Для<br />
проверки правильности построения моделей должны быть выполнены экспер<strong>им</strong>ентальные измерения.<br />
Если оценка влияния некоторых факторов (движения источников и приемников, приливов и течений)<br />
на фокусировку обращением времени не представляет никакой сложности, то численное моделирование и<br />
экспер<strong>им</strong>ентальные измерения с поверхностным волнением и внутренн<strong>им</strong>и волнами представляют нетривиальную<br />
задачу.<br />
Рассмотр<strong>им</strong> эти проблемы и попытаемся найти способы их решения. Для этого необход<strong>им</strong>о определить<br />
те характеристики, которые необход<strong>им</strong>о получить в результате численного моделирования или экспер<strong>им</strong>ентальных<br />
исследований. Результативность ВОВ определяется эффективностью фокусировки, которую<br />
можно охарактеризовать размером фокального пятна, его положением относительно ПИ и параметром,<br />
который назовем фактором фокусировки (ФФ). ФФ определ<strong>им</strong> как отношение амплитуды сигнала в<br />
точке фокусировки к среднему значению амплитуды сигнала вне фокального макс<strong>им</strong>ума.<br />
Для оценки размера фокального пятна путем численного моделирования даже без учета флуктуаций<br />
требуется достаточно большой объем вычислений. Этот объем существенно возрастает при учете флуктуаций.<br />
<strong>Н</strong>еоднородность по трассе распространения еще усложняет решение задачи.<br />
Еще больше проблем возникает при организации и проведении натурных измерений, поскольку для<br />
того чтобы экспер<strong>им</strong>ентально оценить эффективность фокусировки при разных состояниях океанического<br />
волновода требуются продолжительные наблюдения. При этом невозможно спрогнозировать состояние<br />
гидрометеорологических условий для планирования экспер<strong>им</strong>ентов. Измерения при разных условиях могут<br />
быть просто невыполн<strong>им</strong>ы при очень большом волнении 4 . Без пр<strong>им</strong>енения пространственно развитых<br />
приемных систем сложно оценивать размеры фокального пятна и, следовательно, влияние флуктуаций<br />
среды на эффективность фокусировки.<br />
4 Численное моделирование влияния поверхностного волнения показало, что при скорости ветра более 12 м/с<br />
фокальное пятно разрушается и ВОВ становится неэффективным [7]. Так ли это на самом деле можно проверить<br />
только экспер<strong>им</strong>ентально. Однако при такой скорости ветра волнение может составлять больше 3 баллов<br />
[8]. При таком волнении производить измерения с борта большинства судов запрещено.<br />
248
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Поэтому численное моделирование должно не только служить средством оценки эффективности ВОВ,<br />
но и должно позволить выработать методики и рекомендации для экспер<strong>им</strong>ентальных измерений при различном<br />
составе экспер<strong>им</strong>ентального оборудования.<br />
Экспер<strong>им</strong>ентальные измерения и численное моделирование<br />
Глубина (м)<br />
20<br />
40<br />
60<br />
80<br />
100<br />
Фактор фокусировки - 3.8<br />
-0.2 -0.1 0 0.1 0.2<br />
Дистанция от ПИ (км)<br />
Рис. 1. Фокальное пятно, сформированное<br />
гидроакустической системой с ВОВ, измеренное в<br />
0.9<br />
0.8<br />
0.7<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
Глубина (м)<br />
Фактор фокусировки - 2.78<br />
экспер<strong>им</strong>енте.<br />
базальтовым полупространством.<br />
Для учета влияния различного вида флуктуаций на фокусировку обращением времени было выполнено<br />
численное моделирование. Методика описана в [9]. Моделирование выполнялось на основе модовой<br />
теории распространения. Параметры моделирования выбирались из возможности сравнения некоторых<br />
характеристик с характеристиками, полученными при экспер<strong>им</strong>ентальных измерениях в натурных условиях.<br />
Исходя из этого были выбраны следующие параметры моделирования:<br />
1. Полоса частот обращаемого сигнала до 200 Гц в диапазоне от 100 до 300 Гц.<br />
2. Дистанция до ПИ 17500 метров.<br />
3. Толщина волновода 125 метров.<br />
4. Антенны из 32 элементов с шагом 3 метра.<br />
5. В расчете использовалось 10 первых мод.<br />
<strong>Н</strong>а рис. 1 приведен результат экспер<strong>им</strong>ентального измерения фокального пятна. Измерения проводились<br />
при скорости ветра 4 м/с.<br />
Для моделирования влияния изменчивости гидрологических условий были выбраны разные типы<br />
профилей скорости звука, включая идеальный волновод (изоскоростной волновод с абсолютно отражающ<strong>им</strong>и<br />
границами), изоскоростной волновод с нижн<strong>им</strong> полупространством из базальта (волновод Пекерриса),<br />
волновод с профилем скорости звука, полученным в экспер<strong>им</strong>енте и с нижн<strong>им</strong> полупространством из<br />
базальта, волновод, моделирующий внутренние волны с изменяемой глубиной слоя скачка и ряд других<br />
типичных гидрологий. Для расчета мод и волновых чисел для всех гидрологий, кроме первой, использовался<br />
Кракен [10]. Для идеального волновода использовались аналитические завис<strong>им</strong>ости мод и волновых<br />
чисел[11].<br />
Расчет, выполненный для экспер<strong>им</strong>ентального профиля скорости звука в отсутствии возмущений, показал,<br />
что модельный ФФ оказывается даже меньше, чем полученный в натурном экспер<strong>им</strong>енте. Эффективность<br />
фокусировки зависит от числа мод и лучей. При моделировании учитывались только 10 мод, в то<br />
время как реально их могло быть больше. Кроме того в экспер<strong>им</strong>енте могли быть и отраженные сигналы<br />
разного вида, что также повышало эффективность.<br />
Анализ воздействия внутренних волн (ВВ) проводился для случая распространения звука вдоль фронта<br />
ВВ, то есть вдоль всей трассы распространения профиль скорости звука был один и тот же. Рассмотрены<br />
две гидрологии, <strong>им</strong>еющие скачок скорости амплитудой 20 м/с на глубинах 50 и 51 метр. <strong>Н</strong>а рис. 3 при-<br />
30<br />
40<br />
50<br />
60<br />
70<br />
80<br />
90<br />
100<br />
110<br />
-200 -100 0 100 200<br />
Дистанция от ПИ (км)<br />
Рис. 2. Фокальное пятно, полученное численным<br />
моделированием с реальной гидрологией и нижн<strong>им</strong><br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
249
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
ведены результаты фокусировки при неизменной во времени скорости звука со скачком (а) и<br />
Глубина (м)<br />
30<br />
40<br />
50<br />
60<br />
70<br />
80<br />
90<br />
100<br />
Фактор фокусировки - 2.83<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
Глубина (м)<br />
110<br />
110<br />
0<br />
0<br />
-2000 -1000 0 1000 2000<br />
-2000 -1000 0 1000 2000<br />
a)<br />
Дистанция от ПИ (км)<br />
б)<br />
Дистанция от ПИ (км)<br />
Рис. 3. Результаты численного моделирования фокусировки при неизменной во времени скорости звука<br />
со скачком (а) и при смещении скачка на 1 метр по глубине (б).<br />
при смещении скачка на 1 метр по глубине (б). Даже небольшое смещение слоя скачка привело к расфокусировке<br />
и появлению множественных макс<strong>им</strong>умов. <strong>Н</strong>есостоятельность фактора фокусировки хорошо<br />
заметна при сравнении обоих рисунков. <strong>Н</strong>есмотря на то, что амплитуды «ложных» макс<strong>им</strong>умов сравн<strong>им</strong>ы<br />
с макс<strong>им</strong>умом в точке расположения ПИ, ФФ при смещении слоя скачка изменился немного. Это вызвано<br />
тем, что вне основного фокального пятна измеряется среднее значение поля и макс<strong>им</strong>умы сглаживаются.<br />
Однако как грубую оценку эффективности фокусировки ФФ можно использовать.<br />
250<br />
30<br />
40<br />
50<br />
60<br />
70<br />
80<br />
90<br />
100<br />
Фактор фокусировки - 2.11<br />
Заключение<br />
Моделирование, выполненное при различных гидрологиях, показало, что достаточно небольшие вариации<br />
скорости звука могут разрушать фокусировку. При этом какой-либо закономерности изменения<br />
поля в районе фокуса не наблюдалось. Возникает вопрос, как<strong>им</strong> образом можно получить экспер<strong>им</strong>ентальные<br />
оценки эффективности фокусировки в завис<strong>им</strong>ости от флуктуаций среды и вариаций гидрофизических<br />
характеристик мелководных волноводов. Для измерения поля в окрестности точки фокусировки по<br />
методу ВОВ требуется использовать, как мин<strong>им</strong>ум, перемещаемую вертикальную антенну, что очевидно<br />
не всегда возможно. Даже предложенный нами метод с использованием перемещаемого источника [9]<br />
требует использования вертикальной антенны. Как было показано нами, фокусировку обращением времени<br />
в мелководных волноводах можно выполнить для одиночного широкополосного источника. Это позволит<br />
провести экспер<strong>им</strong>ентальные исследования с использованием одиночного источника и двух и более<br />
приемников, разнесенных в пространстве вдоль трассы распространения желательно на расстояние большее,<br />
чем размер фокального пятна. Сигнал с одного приемника используется в качестве пробного. Такая<br />
схема допускает установку приемников и передатчиков стационарно с выводом сигналов на стационарные<br />
пункты. В этом случае нет погодных ограничений. Периодическое повторение операции ВОВ через достаточно<br />
короткое время даст возможность измерить временные завис<strong>им</strong>ости коэффициенты авто- и вза<strong>им</strong>ной<br />
корреляции передаточных функций и, соответственно, определить временную стабильность фокусировки.<br />
Изменение коэффициента вза<strong>им</strong>ной корреляции сигналов с одного приемника в завис<strong>им</strong>ости от<br />
времени разнесения для измерений, сделанных при разных гидрометеорологических условиях, позволит<br />
оценить влияние флуктуаций различной природы. Очевидно, что для получения адекватных оценок требуется<br />
одновременная регистрация гидрометеорологической обстановки. Совместная обработка разнесенных<br />
приемников позволит оценить изменения ФФ.<br />
Работа выполнена при поддержке РФФИ (проект 10-02-01019).<br />
Л И Т Е Р А Т У Р А<br />
1. A.Tolstoy. Matched Field Processing for Underwater Acoustics // World Scientific, Singapore, 1993.<br />
2. M. Fink, D. Cassereau, A. Derode, C. Prada, P. Roux, M. Tanter, J.-L. Thomas and Franё cois Wu. Time-reversed acoustics //<br />
Rep. Prog. Phys., 2000, v.63, р. 1933-1995.<br />
3. W.A. Kuperman, W.S. Hodgkiss, H.C. Song, T. Akal, C. Ferla, and D.R. Jackson. Phase conjugation in the ocean: Experimental<br />
demonstration of a time reversal mirror // J. Acoust. Soc. Am. 103, 25-40 (1998).<br />
4. Распространение звука во флуктуирующем океане: Пер. с англ. / Под ред. С. Флатте. — М.: Мир, 1982. — 336 с., ил.<br />
5. H.C. Song, W.S. Hodgkiss, W.A. Kuperman, K. Sabra, T. Akal and M. Stevenson. Passive reverberation nulling for target enhancement<br />
// J. Acoust. Soc. Am., 122, 3296-3303 (2007).<br />
6. Stromkov A.A. The use of the time reverse acoustics in a shallow sea // Hydroacoustic. V.11. Gdansk. 2008. p.353.<br />
7. А. А. Луньков, В. Г. Петников, А. А. Стромков. Особенности фокусировки низкочастотных звуковых полей в мелком<br />
море // <strong>Акустический</strong> журнал, 2010, Т. 56, №2, с. 256-262.<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
8. Ю.И.Шамраев, Л.А. Шишкина. Океанология // Л. Гидрометеоиздат, 1980, 380с<br />
9. А.А. Луньков, В.Г. Петников, А.А. Стромков. Фокусировка низкочастотного звука в мелком море // В настоящем сборнике.<br />
10. M. B. Porter, The KRAKEN Normal Mode Program // SACLANT Undersea Research Center SM-245, La Spezia, Italy, 1991.<br />
11. Кацнельсон Б.Г., Петников В.Г. Акустика мелкого моря // М. <strong>Н</strong>аука, 1997, 191с.<br />
УДК 623.827:629.5.015<br />
Ю.<strong>Н</strong>. Попов<br />
ЧИСЛЕ<strong>Н</strong><strong>Н</strong>ОЕ МОДЕЛИРОВА<strong>Н</strong>ИЕ ПРОЦЕССА ИЗМЕРЕ<strong>Н</strong>ИЙ АКУСТИЧЕСКИХ<br />
ХАРАКТЕРИСТИК МАТЕРИАЛОВ И КО<strong>Н</strong>СТРУКЦИЙ<br />
В ГИДРОАКУСТИЧЕСКОМ БАССЕЙ<strong>Н</strong>Е<br />
ФГУП «Ц<strong>Н</strong>ИИ <strong>им</strong>. акад. А.<strong>Н</strong>. Крылова»<br />
Россия, 196156 Санкт-Петербург, Московское шоссе, 44<br />
Тел.: (812) 727-67-25; Факс: (812) 727-93-23; E-mail: krylov@krylov.spb.ru<br />
Построена упрощенная численная модель измерения акустических характеристик в гидроакустическом бассейне. Выполнено<br />
решение нестационарной задачи: излучение источником гауссова <strong>им</strong>пульса, распространение <strong>им</strong>пульса в бассейне,<br />
облицованным идеальным покрытием (обеспечивающ<strong>им</strong> моделирование условий, соответствующих неограниченной среде),<br />
и бассейне, облицованным покрытием с конечным коэффициентом отражения. Выполнен анализ задачи рассеяния <strong>им</strong>пульса<br />
на макете. Определен коэффициент отражения от макета, облицованного покрытием с заданными характеристиками,<br />
по результатам вычислений на представленной модели.<br />
В последние десятилетия в связи со стремительным развитием численных методов средств обработки<br />
сигналов, возможностей математического описания сложных процессов появились новые возможности<br />
не только постановки экспер<strong>им</strong>ентов и анализа получаемых результатов. В данной статье приведен<br />
анализ процесса измерения акустической характеристики (коэффициента отражения) от макета, облицованного<br />
гидроакустическ<strong>им</strong> покрытием. В общем случае, при проведении такого рода испытаний на результат<br />
в виде погрешности могут оказывать влияния различные факторы, среди них: расположение и<br />
частотная завис<strong>им</strong>ость самого излучателя, геометрические размеры бассейна и акустические характеристики<br />
покрытия на его стенках, расположение и размеры исследуемого макета и т.д. Одн<strong>им</strong> из инструментов<br />
определения достоверности полученных экспер<strong>им</strong>ентальных данных может являться численная модель<br />
самих испытаний. Обзор результатов анализа испытаний, смоделированных на упрощенной двумерной<br />
модели гидроакустического бассейна, являлся целью данной статьи.<br />
Описанная в статье численная модель строилась на основе методики испытаний макетов с образцами<br />
морской техники (ОМТ) в гидроакустического бассейна переменного давления, входящего в состав<br />
испытательного комплекса в лаборатории разработки средств акустической защиты на базе ФГУП<br />
«Ц<strong>Н</strong>ИИ <strong>им</strong>. акад. А.<strong>Н</strong>. Крылова». Схематично процесс измерения показан на рис. 1.<br />
перегородка<br />
излучатель Приемник<br />
исследуемый<br />
макет<br />
Рис. 1. Схема измерений в гидроакустическом бассейне<br />
Измерения модуля (V ) коэффициента гидролокационного отражения (КГЛО) макетов с образцами<br />
морской техники традиционно выполняют методом относительных измерений по результатам сравнения<br />
модулей амплитуд акустических <strong>им</strong>пульсов, отраженных эталонной пластиной и исследуемым макетом<br />
той же геометрии. При этом в качестве эталонной пластины используется стальная пластина достаточной<br />
толщины и размеров, чтобы обеспечить коэффициент отражения <strong>им</strong>пульса близкий к единице.<br />
Так как V макетов с ОМТ в линейных величинах всегда меньше 1, то на практике искомой величиной<br />
является величина β, дБ, обратная модулю коэффициента отражения, связанная с н<strong>им</strong> соотношением:<br />
β=20lg 1/V, (1)<br />
Pотр.<br />
м<br />
V = V<br />
э<br />
(2)<br />
P<br />
отр.<br />
э<br />
251
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
P<br />
отр . м<br />
P<br />
отр . э<br />
– макс<strong>им</strong>альные уровни селектированных эхо-сигналов от измеряемых макетов с<br />
ОМТ и эталона, соответственно,<br />
V<br />
э<br />
– рассчитываемый коэффициент отражения от бесконечно протяженной стальной пластины<br />
(эталона) толщиной 30 мм в воде, эквивалентной шлифованной пластине из нержавеющей стали<br />
1800х1400х30 мм (Высота х Ширина х Толщина).<br />
Модуль амплитуды излучаемых <strong>им</strong>пульсов непрерывно контролируется по отражению от элемента<br />
конструкции бассейна, для которого модуль коэффициента отражения – величина, стабильная за период<br />
времени измерений.<br />
При простоте приведенной схемы измерений для получения правильных значений акустических<br />
характеристик ОМТ необход<strong>им</strong>о выполнение следующих условий [1], которые были учтены при построении<br />
численной модели:<br />
- измерения должны производиться в условиях, приближенно соответствующих неограниченной<br />
среде;<br />
- при измерениях должны учитываться интерференционные явления при размещении приемника<br />
звука вблизи поверхности образца;<br />
- должно быть учтено влияние дифракционных явлений при выборе вза<strong>им</strong>ного расположения излучателя,<br />
приемника и испытуемого образца.<br />
Источник<br />
1 2 3 4<br />
Исследуемый макет<br />
Контрольные точки для установки гидрофо-<br />
Рис. 2. Численная модель измерений в гидроакустическом бассейне<br />
С учетом вышеизложенного была построена конечноэлементная двумерная модель бассейна<br />
(рис. 2) для определения коэффициента отражения от ОМТ с заданными акустическ<strong>им</strong>и характеристиками.<br />
В рамках данной модели решалась нестационарная задача распространения гауссова <strong>им</strong>пульса от<br />
источника и определения модуля отражения от макета ОМТ. Для упрощения модели в качестве эталона<br />
рассматривалась абсолютно жесткая стенка, для которой V<br />
э<br />
= 1 (учет стальной пластины заданной толщины<br />
возможен, однако он значительно усложнял модель бассейна и приводил к необход<strong>им</strong>ости рассчитывать<br />
частотную завис<strong>им</strong>ость V<br />
э<br />
). Значения амплитуды падающего и отраженного сигналов контролировались<br />
в четырех точках, расположенных между источником и макетом ОМТ (или эталоном). Для тестовой<br />
задачи была выбрана частота 2кГц, коэффициент отражения образца ОМТ равнялся 0,3. Задача определения<br />
коэффициента отражения от макета ОМТ решалась в двух постановках: в первом случае на<br />
стенках бассейна было установлено идеальное покрытие с <strong>им</strong>педансом равным <strong>им</strong>педансу воды (такое<br />
покрытие макс<strong>им</strong>ально точно моделировало условие неограниченной среды), во втором случае покрытие<br />
<strong>им</strong>ело конечный коэффициент отражения равный V = 0, 2 (или β=14 дБ). <strong>Н</strong>а рис. 3-6 приведены результаты<br />
расчета распространения <strong>им</strong>пульса от источника и его отражения от макета ОМТ для случая бассейна<br />
с идеальными стенками.<br />
Рис. 3. Амплитуда и распределение акустического поля в бассейне через 0.002 секунды<br />
252
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Рис. 4. Амплитуда и распределение акустического поля в бассейне через 0.006 секунды<br />
Рис. 5. Амплитуда и распределение акустического поля в бассейне через 0.017 секунды<br />
Рис. 6. Амплитуда и распределение акустического поля в бассейне через 0.02 секунды<br />
Рис. 7. Амплитуда гауссова <strong>им</strong>пульса<br />
Рис. 8. Сигнал в бассейне с <strong>им</strong>педансными границами (Импеданс стенок 0.67*рс, т.е. коэффициент отражения<br />
от стенок составлял 0,2). Отсчеты на графике сняты в точке 3.<br />
253
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
<strong>Н</strong>а рис.7 показана амплитуда гауссова <strong>им</strong>пульса, излученная источником и зафиксированная в<br />
точках отсчета1,2,3,4 (условные точки расположения приемных гидрофонов в гидроакустическом бассейне,<br />
см. рис. 2).<br />
Таблица 1: Результаты определения коэффициента отражения макета ОМТ на численной модели<br />
254<br />
Погрешность<br />
определения, %<br />
Коэфф. отражения<br />
от стенок бассейна<br />
Контр.<br />
точки<br />
Импульс от эталона Импульс от макета ОМТ Рассчитанный<br />
коэффициент<br />
Время, с Амплитуда Время, с Амплитуда отражения<br />
V = 0<br />
1 0,0281 228294 0,0282 75815 0,33 3,2<br />
(Идеальные стенки)<br />
2 0,0254 232822 0,0255 81097 0,35 4,8<br />
3 0,0227 236764 0,0228 83054 0,35 5,1<br />
4 0,0196 127209 0,0197 48220 0,38 7,9<br />
V 3 0,0227 273097 0,023 90650 0,33 3,2<br />
= 0,2<br />
<strong>Н</strong>а рис. 8 показано распределение поля от источника через 0,01 сек после начала излучения и график<br />
амплитуды поля, снятый в контрольной точке 3 для случая бассейна с неидеальным покрытием. Из<br />
сравнения с рис. 4 видно, что поле в бассейне с отражающ<strong>им</strong>и стенками <strong>им</strong>еет более сложную структуру<br />
(следствие переотражения сигнала от стенок бассейна). Однако, из-за высокой противогидролокационной<br />
эффективности покрытия бассейна (β=14 дБ) амплитуда вторичных пиков мала, что позволяет выделить<br />
полезный сигнал на общем фоне.<br />
В результате выполненной работы по численному моделированию процесса измерений акустических<br />
характеристик материалов и конструкций в гидроакустическом бассейне были получены следующие<br />
результаты:<br />
- построена двумерная конечноэлементная модель, позволяющая решать нестационарную задачу<br />
распространения акустического <strong>им</strong>пульса в замкнутом объеме с определенными граничными условиями<br />
на стенках;<br />
- смоделированы условия проведения экспер<strong>им</strong>ента по определению акустических характеристик<br />
макетов ОМТ;<br />
- выполнен анализ распределения поля внутри бассейна с идеальными и неидеальными граничными<br />
условиями на стенках.<br />
- рассчитан коэффициент отражения от макета ОМТ конечных размеров с заданным коэффициентом<br />
отражения (таблица 1);<br />
- показана погрешность в определении коэффициента отражения при выбранных геометрических<br />
параметрах образца, излучателя, бассейна и расположения приемных гидрофонов (таблица 1).<br />
Хорошая сход<strong>им</strong>ость с заданным значением (погрешность не превышала нескольких процентов)<br />
позволяет сделать вывод об эффективности данного подхода при подготовке и проведении акустических<br />
испытаний.<br />
Л И Т Е Р А Т У Р А<br />
1. И.И Клюкин, А.Е. Колесников. Акустические измерения в судостроении // изд. «Судостроение» / г. Ленинград. –<br />
1968. – С.207–216.<br />
УДК 534.23<br />
И.О.Ярощук, О.Э.Гулин<br />
СТАТИСТИЧЕСКОЕ МОДЕЛИРОВА<strong>Н</strong>ИЕ ЗВУКОВЫХ ПОЛЕЙ ДЛЯ МОДЕЛИ<br />
СЛОИСТОГО МЕЛКОГО МОРЯ С ФЛУКТУАЦИЯМИ ПАРАМЕТРОВ Д<strong>Н</strong>А<br />
Государственное учреждение Тихоокеанский океанологический <strong>институт</strong> <strong>им</strong>. В.И. Ильичева<br />
Дальневосточного отделения Российской академии наук<br />
Россия, 690041 Владивосток, ул. Балтийская, 43<br />
Тел.: (4232) 31-26-17; Факс: (4232) 31-25-73<br />
E-mail: yaroshchuk@poi.dvo.ru, gulinoe@poi.dvo.ru<br />
Для условий мелкого моря с поглощающ<strong>им</strong> жидк<strong>им</strong> дном и слоистыми флуктуациями скорости звука представлены расчеты<br />
статистических моментов звукового поля среднечастотного диапазона. Вычисления проведены на основе метода<br />
статистического моделирования, пр<strong>им</strong>ененного к задаче Штурма-Лиувилля для расчета случайных мод, по которым раскладывается<br />
звуковое поле. Показано сильное влияние совместного воздействия флуктуаций скорости звука в дне и поглощения<br />
на статистическое решение.<br />
Ранее в работах [1,2] мы рассматривали влияние случайных флуктуаций скорости звука, моделирующих<br />
тонкую термохалинную структуру вод, на распространение звука в мелком море. Вычисления показали,<br />
что при наличии потерь в среде флуктуации скорости звука приводят к эффекту замедления спадания с<br />
расстоянием интенсивности поля давления. Данный эффект обусловлен флуктуациями мн<strong>им</strong>ой части собственных<br />
значений случайных мод, составляющих звуковое поле, и даже для весьма слабых флуктуаций
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
скорости звука заметно проявляется с ростом расстояния от источника. В настоящей работе представлены<br />
результаты статистического моделирования для ситуации, когда скорость звука флуктуирует в поглощающих<br />
донных осадках. Для такой ситуации интенсивность флуктуаций на несколько порядков превышает<br />
значения, характерные для водной толщи, поэтому ожидаемый эффект должен уже проявляться на<br />
небольших расстояниях от источника, что говорит о его важности и для неслоистой среды.<br />
Рассмотр<strong>им</strong> морскую среду, состоящую из двух слоев – водного и жидких осадков. Скорость звука в воде<br />
и плотность задаются постоянными величинами, а в жидких осадках c 1 (z) = c 1 (1+ ε(z)) , где c 1 – в среднем<br />
постоянная регулярная часть профиля, а ε(z) – малые флуктуации относительно нее, которые выберем<br />
случайным процессом «белым шумом» с характеристиками:<br />
〈ε(z)〉 = 0 , 〈ε(z)ε(z 1 )〉 = 2σ 2 l δ(z - z 1 ) . (1)<br />
Здесь угловые скобки означают статистическое усреднение, σ 2 - безразмерная дисперсия случайного процесса,<br />
а l - некоторый малый вертикальный масштаб, меньший всех остальных масштабов в задаче. Для<br />
вычислений были выбраны: глубина водного слоя H - h = 50 м, однородные скорость звука c = 1500 м/с и<br />
плотность ρ = 10 3 кг/м 3 в воде; параметры жидкого слоя донных осадков - толщина h - h 0 = 100 м, c 1 = 1600<br />
м/с, ρ 1 = 2⋅10 3 кг/м 3 , поглощение β = 10 -3 (n = (c/c 1 )(1 + iβ)) и интенсивность флуктуаций σ 2 l =10 -3 м. Выбранные<br />
значения параметров отражают условия распространения, часто присущие в холодное время года<br />
шельфовым мелководным районам Желтого и Японского морей, а интенсивность флуктуаций соответствует<br />
некоторой средней величине по данным о характеристиках слоистой структуры скорости звука в<br />
500<br />
450<br />
400<br />
350<br />
n realizations<br />
300<br />
250<br />
200<br />
150<br />
100<br />
50<br />
0<br />
11 12 13 14 15 16 17<br />
Number N of eigenvalues<br />
Рис. 1. Распределение по реализациям количества собственных значений N в статистической задаче<br />
морских осадках [2,3]. Поле звукового давления точечного источника в жидкой слоистой осес<strong>им</strong>метричной<br />
среде может быть представлено суммой нормальных мод вида:<br />
p(r,z) = ∑ ϕ<br />
l<br />
(z) ϕ<br />
l<br />
(z 0 )G l (r) , G l (r) = i H 0 (κ l r)/(4ρ) , (2)<br />
l<br />
где (r,z) – координаты цилиндрической системы, ϕ l (z) - собственные функции с областью определения D<br />
∈(H,h 0 ), κ l =κ l ′+ iκ l ′′ – комплексные собственные значения задачи, которые, как и собственные функции,<br />
являются случайными. Границу h 0 считаем свободно пропускающей.<br />
<strong>Н</strong>а рис. 2-4 представлены результаты статистического моделирования энергетических характеристик звукового<br />
поля частоты 500 Гц: средней интенсивности поля давления 〈I〉 = 〈|p| 2 〉 и относительной среднеквадратичной<br />
величины S/〈I〉 , S = (〈I 2 〉 - 〈I〉 2 ) 1/2 . Все уровни приведены в децибелах относительно значений<br />
при r = 1 м от источника, излучающего в свободном пространстве. Источник расположен на глубине<br />
10 м от поверхности, горизонт наблюдения для разрезов поля показан на рисунках. Сплошные кривые соответствуют<br />
детерминированному случаю (ε(z) = 0), маркерными кривыми показаны статистические результаты<br />
усреднения по ансамблю из n = 1000 случайных реализаций поля. В отсутствие флуктуаций, ε(z)<br />
= 0, в водном слое при выбранной частоте возбуждается N = 12 распространяющихся мод, определяющих<br />
255
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
-50<br />
H-z0 =10 m; z= h<br />
-60<br />
I, (d B)<br />
-70<br />
-80<br />
-90<br />
-100<br />
2 4 6 8 10 12 14 16 18 20<br />
1.5<br />
S/<br />
1<br />
0.5<br />
0<br />
2 4 6 8 10 12 14 16 18 20<br />
r (km)<br />
Рис. 2. Потери при распространении для статистических моментов звукового давления.<br />
Горизонт наблюдения на дне водного слоя z = h. График для относительной<br />
среднеквадратичной величины интенсивности приведен в линейном масштабе<br />
звуковое поле на дистанциях r > 1 км. При этом вследствие потерь от вза<strong>им</strong>одействия с границей осадков<br />
число существенных мод при r ≈ 5 км становится 7÷8, а на конечных расстояниях 4÷5. <strong>Н</strong>аличие флуктуаций<br />
приводит к изменению этого числа. Так, от реализации к реализации общее число собственных значений<br />
варьируется от 11 до 17, как показано на рис. 1. Динамика собственных значений в основном и определяет<br />
законы поведения статистических моментов поля, как на малых, так и на больших расстояниях.<br />
-50<br />
H-z0 =10 m; H-z= 10 m<br />
I , (dB)<br />
-60<br />
-70<br />
-80<br />
2 4 6 8 10 12 14 16 18 20<br />
1.5<br />
S/<br />
1<br />
0.5<br />
0<br />
2 4 6 8 10 12 14 16 18 20<br />
r (km)<br />
Рис. 3. Потери при распространении для статистических моментов звукового давления. Горизонт<br />
наблюдения на глубине 10 м от поверхности (H - z = 10 м). График для относительной<br />
среднеквадратичной величины интенсивности приведен в линейном масштабе<br />
Влияние флуктуаций становится заметно уже при r ∼ 2÷3 км, оно приводит к сглаживанию завис<strong>им</strong>остей,<br />
и, начиная с расстояний r > 5 км, соответствующие кривые средней интенсивности 〈I〉 часто становятся<br />
монотонно спадающ<strong>им</strong>и (рис. 2). Это объясняется тем фактом, что статистическое усреднение подавляет<br />
когерентную сумму мод интенсивности звукового поля, тогда как некогерентная сумма изменяется слабо.<br />
256
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
50<br />
r=5 km<br />
50<br />
r=20 km<br />
45<br />
45<br />
40<br />
40<br />
35<br />
35<br />
30<br />
30<br />
z<br />
25<br />
25<br />
20<br />
20<br />
15<br />
15<br />
10<br />
10<br />
5<br />
5<br />
0<br />
-90 -80 -70 -60 -50<br />
I, , S/ (dB)<br />
0<br />
-90 -80 -70 -60 -50<br />
Рис. 4. Разрезы по глубине для интенсивности и статистических моментов звукового давления. Расстояния<br />
наблюдения 5 км и 20 км. Источник на глубине 10 м от поверхности (H - z 0 = 10 м). Сплошные кривые –<br />
I при ε(z) = 0, •• - средняя интенсивность, ** - относительная среднеквадратичная величина интенсивности<br />
Друг<strong>им</strong> результатом моделирования является более медленное спадание средней интенсивности по сравнению<br />
с детерминированным случаем. Это является следствием флуктуаций положительной мн<strong>им</strong>ой части<br />
собственных значений мод, приводящих в среднем к снижению величины потерь мод при вза<strong>им</strong>одействии<br />
с границей осадков. Еще один результат заключается в том, что, как легко заметить по кривым для<br />
четвертого статистического момента поля на рис. 2-4, при r > 1 км относительная среднеквадратичная величина<br />
интенсивности S/〈I〉 сравн<strong>им</strong>а со средней величиной 〈I〉, а для некоторых дистанций превосходит<br />
〈I〉. Так<strong>им</strong> образом, в рассмотренной ситуации наблюдаются сильные флуктуации звукового поля практически<br />
на всем интервале расстояний, представляющих интерес. В то же время эффект ослабления потерь<br />
интенсивности с расстоянием получается менее выраженным, чем предварительно предполагалось на основе<br />
моделирования статистики поля при наличии флуктуаций скорости звука в водном слое [1,2]. Это<br />
означает, что флуктуации скорости звука в водном слое и в донных осадках неодинаково влияют на распространяющиеся<br />
моды, формирующие звуковое поле.<br />
Л И Т Е Р А Т У Р А<br />
1. Гулин О.Э., Ярощук И.О., Янг Д. Статистические расчеты энергетических характеристик векторного акустического поля в слоистонеоднородном<br />
флуктуирующем мелком море // Акустика океана. М. : ГЕОС, 2004. С. 78-81.<br />
2. Ярощук И.О., Гулин О.Э. Метод статистического моделирования в задачах гидроакустики. Владивосток: Дальнаука, 2002. 320 с.<br />
3. Кацнельсон Б.Г., Петников В.Г. Акустика мелкого моря. М.: <strong>Н</strong>аука, 1997. 191 с.<br />
УДК 534.883<br />
В.А.Баранов, Э.П.Гулин, С.<strong>Н</strong>.Кащеев.<br />
АДАПТИВ<strong>Н</strong>АЯ ИДЕ<strong>Н</strong>ТИФИКАЦИЯ ИМПУЛЬС<strong>Н</strong>ОЙ ФУ<strong>Н</strong>КЦИИ М<strong>Н</strong>ОГОЛУЧЕВОГО<br />
КА<strong>Н</strong>АЛА С УЧЕТОМ ФЛУКТУАЦИЙ ВРЕМЕ<strong>Н</strong>И РАСПРОСТРА<strong>Н</strong>Е<strong>Н</strong>ИЯ СИГ<strong>Н</strong>АЛА<br />
ФГУП «<strong>Акустический</strong> <strong>институт</strong> <strong>им</strong>. акад. <strong>Н</strong>.<strong>Н</strong>. <strong>Андреева</strong>»<br />
Россия, 117036 Москва, ул. Шверника, д.4<br />
Тел.: 8(499)7236511; Факс: (499)1268411; E-mail: bvp@akin.ru<br />
Создан алгоритм адаптивного синтеза параметров <strong>им</strong>пульсной функции канала при наличии флуктуаций времен прихода<br />
лучей. Предложен комбинированный критерий адаптивной опт<strong>им</strong>изации по методу на<strong>им</strong>еньших квадратов, основанный на<br />
совместной оценке неизвестного вектора V (<strong>им</strong>пульсной функции идентифицируемой системы) и случайной переменной t<br />
(времени распространения сигнала в канале). При моделировании подтверждена независ<strong>им</strong>ость качества идентификации<br />
от дисперсии и корреляционных характеристик времени распространения сигнала. Моделирование проведено для наблюдаемых<br />
в реальных океанических условиях параметров гидроакустического канала и флуктуаций времен прихода сигналов.<br />
Для проведения согласованной со средой обработки гидроакустических сигналов необход<strong>им</strong>о располагать<br />
информацией об <strong>им</strong>пульсной реакции (<strong>им</strong>пульсной функции) или о передаточной функции (преобразовании<br />
Фурье <strong>им</strong>пульсной функции) канала распространения сигналов на входе приемной системы.<br />
Это позволяет в той или иной степени ослабить искажающее воздействие гидроакустического канала, являющегося<br />
многолучевым (многомодовым) каналом со случайно изменяющ<strong>им</strong>ися параметрами, а в некоторых<br />
случаях полностью восстановить исходный (излученный) сигнал. Вопросы, связанные с измерениями<br />
<strong>им</strong>пульсной реакции многолучевых каналов распространения радиосигналов и гидроакустических<br />
257
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
сигналов, а также стабильности <strong>им</strong>пульсного отклика этих каналов пр<strong>им</strong>енительно к передаче дискретных<br />
сообщений, рассмотрены в целом ряде работ (см., напр<strong>им</strong>ер, [1-4]). Обычно для определения <strong>им</strong>пульсной<br />
функции канала используют широкополосные шумоподобные или фазоманипулированные сложные пилот-сигналы<br />
и вза<strong>им</strong>но-корреляционную обработку. Следует отметить, что синтез <strong>им</strong>пульсной функции<br />
канала (ИФК) является частным случаем адаптивной идентификации динамической системы с требуемыми<br />
характеристиками [5]. Эта задача пр<strong>им</strong>енительно к гидроакустическому каналу при воздействии аддитивной<br />
шумовой помехи была рассмотрена нами в [6]. Там было показано, что при воздействии шумовой<br />
помехи адаптивный алгоритм идентификации по методу на<strong>им</strong>еньших квадратов (М<strong>Н</strong>К) и восстановления<br />
сигнала обеспечивает приемлемые характеристики, однако он весьма критичен к фазовым искажениям<br />
сигнала и, следовательно, - к флуктуациям времени распространения сигнала в канале. Это обстоятельство<br />
было использовано при разработке настоящего алгоритма адаптивной идентификации ИФК и восстановления<br />
исходного сигнала в условиях дружных флуктуаций времени распространения в многолучевом канале.<br />
Пусть на вход идентифицируемой системы подается произвольный сигнал X(.)=(x(0),…,x(M)), заданный<br />
М+1 отсчетом на интервале времени, равном длительности сигнала T. Величина интервала между<br />
соседн<strong>им</strong>и отсчетами (шага дискретизации) равна dt =Т/M. Рассмотр<strong>им</strong> случай дружных флуктуаций лучей,<br />
когда интервалы между моментами прихода лучей не флуктуируют. За начало отсчета дискретного<br />
времени n(0)=0 пр<strong>им</strong>ем среднее значение времени прихода первого луча, а флуктуации времен прихода<br />
лучей на каждом шаге алгоритма будем выражать целым числом r, одинаковым для каждого луча. Сигнал<br />
на выходе канала Y(.)=(y(0),…,y(L+M)), рассматриваемый на интервале времени (L+M)dt, является сверткой<br />
входного сигнала и неизвестной случайной <strong>им</strong>пульсной функции канала g(l,r):<br />
y(k, r)= g(l, r)·x(k-l), k=0,…..,M+L, l=0,…..,L. (1)<br />
lΣ<br />
Здесь k - номер временного отсчета процесса на выходе канала, l - номер временного отсчета ИФК на интервале<br />
[0, L] и индекс суммирования в операции свертки (1), L – число отсчетов на интервале времени<br />
реакции канала, r - неизвестная случайная величина временного сдвига невозмущенных значений функции<br />
g(l) (параметр сдвига по времени в i-й итерации адаптивного процесса). Случайный процесс r(i) является<br />
дискретным случайным процессом с характеристиками, <strong>им</strong>итирующ<strong>им</strong>и параметры флуктуаций времени<br />
распространения сигнала в гидроакустическом канале.<br />
Адаптивная идентификация проводится по алгоритму М<strong>Н</strong>К с мин<strong>им</strong>изацией оценки среднего<br />
квадрата ошибки e(k) определения отклика реальной системы y(k)<br />
e(k,r)=z(k) - y(k,r), (2)<br />
где z(k) - адаптивное приближение отклика идентифицируемой системы с ИФК v(l):<br />
z(k)= v(l)·x(k-l), k=0,……,M+L, l=0,……,L. (3)<br />
lΣ<br />
Опишем работу алгоритма. <strong>Н</strong>а каждом шаге адаптации необход<strong>им</strong>о вычислить оценку ˆr (i) неизвестного<br />
параметра r(i) и использовать её на следующем шаге адаптивного алгоритма. <strong>Н</strong>еобход<strong>им</strong>о учитывать,<br />
что параметры канала (число лучей, факторы фокусировки и времена запаздывания) относятся к<br />
ненаблюдаемым величинам и не могут быть использованы в алгоритме обработки сигнала. Доступными<br />
являются только входная функция X(.) (пилот - сигнал) и отклик канала y(k,r). Оценка ˆr (i) флуктуаций<br />
времени прихода сигнала r(i) вырабатывается в рамках алгоритма идентификации ИФК V(i) на каждом<br />
шаге адаптации. Коррекция вектора ИФК V(i)= (v(i,0),…,v(i,L)) на i-м шаге производится по координатам<br />
v(i,l) в соответствии с процедурой М<strong>Н</strong>К с использованием оценки ˆr (i-1) для смещения времени прихода<br />
входного пилот - сигнала:<br />
V(i)=V(i-1) – c⋅e(k, r)⋅x(k- ˆr (i-1)). (4)<br />
Через c обозначен параметр сход<strong>им</strong>ости алгоритма. Вычисление ˆr (i) на основе мин<strong>им</strong>изации оценки дисперсии<br />
ошибки<br />
2<br />
σ<br />
MIN<br />
=min{disp[e(k, ir)]} (5)<br />
обеспечивает опт<strong>им</strong>изацию адаптивного процесса оценки ИФК в условиях флуктуаций времени прихода<br />
сигнала в канале. Параметр ir, равный произвольному целому числу (как положительному, так и отрицательному),<br />
задает глубину поиска наилучшей оценки временной задержки в канале. Адаптивный процесс,<br />
определяемый соотношениями (4), (5), сходится к стационарному решению ˆV , а выходной сигнал z(k)<br />
2<br />
является достигнутой оценкой сигнала y(k). Дисперсия ошибки σ (i)=disp[e(k, ˆr (i))] монотонно убывает,<br />
258
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
обеспечивая сход<strong>им</strong>ость процесса, а последовательность оценок ˆr (i) после непродолжительного переходного<br />
процесса приводит к ожидаемому значению ˆr (i)=0.<br />
Рассмотр<strong>им</strong> несколько пр<strong>им</strong>еров.<br />
Задад<strong>им</strong> начальные условия адаптивного процесса (4), (5): i=0, ˆr (i)=0, e(k,r)=0,1, k=0,…,M+L, V(i)=0.<br />
Выберем параметры алгоритма идентификации ИФК:<br />
- T=1мс, M=128, dt=7,8мкс, L=640, B=dt⋅L=5мс (время реакции канала);<br />
- число ненулевых значений ИФК - N=4 (4-х лучевой канал);<br />
- временной интервал между лучами - 1,25мс;<br />
- номера отсчетов, для которых задаются ненулевые значения ИФК, - (0; 160; 320; 480);<br />
- ненулевые значения ИФК (факторы фокусировки лучей) - (1; 1; 1; 1);<br />
- параметр сход<strong>им</strong>ости алгоритма выбирался из условия сход<strong>им</strong>ости процесса адаптации в интервале<br />
c=10 -4 – 10 -5 ;<br />
- установленное число выполненных циклов коррекции (условное окончание процесса адаптации) -<br />
iend=1000;<br />
- время адаптации – Т ад =(T+B)⋅iend=6с.<br />
1. Идентификация V(i) при наличии флуктуаций времени распространения сигналов.<br />
Задад<strong>им</strong> входной сигнал в виде одного периода гармонической функции: x(k)=sin(2πk/М),<br />
k=0,...,M, M=128. Среднеквадратичное значение флуктуаций времени прихода сигнала sr=dt·sko задавался<br />
с числом интервалов квантования sko от 0 до 5. Случайный процесс r(i) вычислялся методом скользящего<br />
сглаживания действительного нормального случайного процесса и преобразовывался к виду целых чисел.<br />
Глубина сглаживания m подбиралась экспер<strong>им</strong>ентально по критерию совпадения коэффициентов автокорреляции<br />
случайного процесса r(i) и флуктуаций времени распространения t сигнала, приходящего из 2-<br />
й зоны конвергенции [6]. Расчеты проводились для значений глубины сглаживания m=900 и m=1 пр<strong>им</strong>енительно<br />
к случаям медленных и быстрых флуктуаций соответственно. Сигнал повторялся для каждого<br />
последующего цикла без изменений. Выходной процесс рассматривался на интервале M+L, на котором<br />
может быть размещено без наложения 4 периода входной функции (M
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
4. Влияние интерференционных изменений сигнала.<br />
Этот вид искажений сигнала возникает при условии M>L в двухлучевом канале или, в более общем<br />
случае, при превышении длительностью сигнала на<strong>им</strong>еньшего временного интервала между смежными<br />
лучами. В предыдущих пр<strong>им</strong>ерах этот вид искажений отсутствовал, поскольку там рассматривался<br />
случай M
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
<strong>Н</strong>а внутренних водоемах пр<strong>им</strong>еняется гидроакустическое оборудование ближнего действия. <strong>Н</strong>аиболее востребованными<br />
являются эхолоты, гидролокаторы бокового обзора, профилографы речного дна. Для задач контроля доступа к<br />
защищенным объектам пр<strong>им</strong>еняются гидролокаторы кругового и секторного обзора. В настоящее время рынок подобных<br />
устройств представлен, в основном, приборами иностранного производства. Имеющийся отечественный научный потенциал<br />
не <strong>им</strong>еет соответствующей реализации на практике. Разработка и производство конкурентноспособной гидроакустической<br />
аппаратуры является одн<strong>им</strong> из направлений реализации Федеральной целевой программы «Развитие гражданской<br />
морской техники на 2009-2016 г.г.<br />
Задачей речной гидроакустики является теоретическое изучение особенностей распространения<br />
гидроакустических сигналов в реках и озерах, а также практическое пр<strong>им</strong>енение полученных знаний при<br />
создании и эксплуатации гидроакустического оборудования речных судов, сооружений и водолазных<br />
служб. В настоящее время вновь повышается роль внутреннего судоходства в транспортных перевозках<br />
внутри страны. Это неизбежно приводит к необход<strong>им</strong>ости замены и модернизации устаревшего парка судов,<br />
портовых и гидротехнических сооружений. Внутреннее судоходство нуждается в актуальной навигационной<br />
информации, в том числе для предупреждения столкновений судов.<br />
Задачей речной гидроакустики является также контроль водных биоресурсов для нужд промышленного<br />
рыболовства и экологии. Объем промышленной добычи рыбы на внутренних водоемах снизился<br />
в несколько раз, по сравнению с 80-ми годами прошлого столетия, но значительно вырос браконьерский<br />
лов рыбы, что требует более полной и оперативной информации о текущем состоянии водных биоресурсов.<br />
Сравнительно новыми задачами являются защита внутренних водоемов от террористических угроз<br />
и предупреждение возникновения экологических проблем от находящихся на дне нефтесодержащих<br />
пластов, неразорвавшихся боеприпасов и затопленного х<strong>им</strong>ического оружия.<br />
Скорость звука в пресной воде - около 1450 м/сек, что в среднем на 50 м/сек меньше, чем в соленой.<br />
Меньшая скорость звука в пресной воде обусловлена ее меньшей плотностью. Пресная вода легче<br />
морской на 2,5-3% из-за наличия в ней меньшего количества солей.<br />
Сж<strong>им</strong>аемость и плотность воды зависят от ее температуры, солености и гидростатического давления.<br />
При повышении температуры сж<strong>им</strong>аемость и плотность воды уменьшаются, а скорость звука повышается.<br />
Соленость воды также влияет на сж<strong>им</strong>аемость и плотность. При уменьшении солености плотность<br />
уменьшается, а сж<strong>им</strong>аемость увеличивается. <strong>Н</strong>апр<strong>им</strong>ер, при изменении солености на 1% плотность изменяется<br />
в среднем на 0,08%, а сж<strong>им</strong>аемость на 0,3%. Большее изменение коэффициента сж<strong>им</strong>аемости по<br />
отношению к изменению плотности приводит к тому, что скорость звука при увеличении солености будет<br />
возрастать. В среднем уменьшение солености на 1% дает снижение скорости звука на 1,14 м/с. С увеличением<br />
глубины на 10 метров гидростатическое давление увеличивается приблизительно на 1 атм. С ростом<br />
гидростатического давления плотность воды увеличивается, а коэффициент сж<strong>им</strong>аемости уменьшается.<br />
При этом коэффициент сж<strong>им</strong>аемости изменяется более резко, чем плотность. Поэтому в целом при увеличении<br />
гидростатического давления скорость звука также будет возрастать. В среднем на одну атмосферу<br />
скорость звука возрастает на 0,18 м/с. Скорость звука можно считать функцией температуры, солености и<br />
давления[1].<br />
Вода также содержит в себе воздух и газы в растворенном состоянии и в виде пузырьков. <strong>Н</strong>аибольшее<br />
влияние на скорость звука оказывают газовые и воздушные пузырьки. Скорость звука в воде, насыщенной<br />
пузырьками, может уменьшится на величину до 1%.<br />
Основными особенностями водной среды речных водоемов c точки зрения факторов, влияющих<br />
на распространение звука, является низкое содержание солей и высокая концентрация взвесей.<br />
<strong>Н</strong>а концентрацию взвесей существенно влияет скорость течения. При скорости потока в 0,3 м/с<br />
захватывается и переносится тонкий песок, при скорости 1 м/с передвигается крупный песок и мелкий<br />
гравий, при 2 м/с может переносится галька диаметром до 10 см. Концентрация взвешенного материала в<br />
речной воде может достигать нескольких килограмм на кубический метр. Благодаря этому крупные реки<br />
выносят в свои устья миллионы тонн ила в год. <strong>Н</strong>апр<strong>им</strong>ер, Волга, до создания водохранилищ, выносила 20<br />
миллионов тонн взвесей. Река Янцзы каждый год выносит в Желтое море свыше 2,5 миллиарда тонн песка,<br />
ила и глинистых частиц.<br />
Из-за малой глубины большинства водоемов сезонные колебания температуры воды в них достигают<br />
20ºС и более. В России поверхность большинства внутренних водоемов з<strong>им</strong>ой замерзает.<br />
Разница в гидростатическом давлении, также влияющем на скорость звука, на поверхности и около<br />
дна для большинства рек, даже самых крупных, невелика. К пр<strong>им</strong>еру, средняя глубина Волги составляет<br />
около 9 метров, в некоторых местах до 30-40. Учитывая, что скорость звука возрастает на 1,5 м/с с<br />
увеличением давления на 10 атм. или на 100 метров глубины, изменением скорости звука с увеличением<br />
261
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
глубины можно пренебречь. Течение воды, перепады глубин, вносят вклад в перемешивание воды на разных<br />
глубинах и к образованию слоя воды с однородными свойствами.<br />
В тоже время, отсутствие крупных волн на поверхности речных водоемов приводит к образованию<br />
верхнего слоя воды, сильно подверженному влиянию температуры приповерхностного воздуха и нагреву<br />
Солнцем. Прогреву верхнего слоя воды также способствует низкая прозрачность речной воды. В<br />
мутной воде большинстве рек поглощение света составляет не менее 90% на 1 м. пути. <strong>Н</strong>а глубину 10 м.<br />
проникает 18% солнечной энергии, а на 100 м. всего 1%.<br />
<strong>Н</strong>а поглощение и рассеяние звука в речной воде влияют высокая насыщенность взвешенными частицами,<br />
в том числе биологического происхождения и близость дна. Взвешенные частицы отражают и<br />
рассеивают звук с длиной волны, близкой к размерам частиц. Малая глубина водоемов приводит к многократным<br />
отражениям гидроакустического сигнала. Рефракция звуковых волн, благодаря малой глубине,<br />
также выражена мало, несмотря на изменение температуры воды в завис<strong>им</strong>ости от глубины. В теплое<br />
время года температура поверхностного слоя воды теплее, чем на глубине. В холодное время года верхний<br />
слой холоднее.<br />
Кроме рассмотренных крупномасштабных закономерных изменений скорости звука в пресной<br />
воде, существуют также и мелкомасштабные случайные изменения, обусловленные случайными изменениями<br />
температуры и концентрации взвеси и пузырьков воздуха. Эти изменения особенно характерны для<br />
поверхностных слоев, где почти каждый кубометр воды несколько отличается от таких же соседних объемов.<br />
Случайные изменения <strong>им</strong>еют не только пространственный, но и временной характер[1].<br />
Указанные особенности речной гидроакустики необход<strong>им</strong>о учитывать для эффективного пр<strong>им</strong>енения<br />
гидроакустической аппаратуры.<br />
По назначению, месту расположения на носителе и виду выполняемых работ весь ряд гидроакустических<br />
приборов и устройств можно разделить на несколько групп:<br />
- Гидролокаторы кругового и секторного обзора<br />
- Гидролокаторы бокового обзора<br />
- Эхолоты<br />
- Профилографы морского дна<br />
- Гидроакустические системы позиционирования<br />
В речной гидроакустике находят пр<strong>им</strong>енение все группы приборов, с учетом использования их в<br />
условиях сравнительно небольших глубин и размеров акватории.<br />
В настоящее время гидроакустическая аппаратура гражданского и двойного назначения представлена,<br />
в основном, образцами иностранного производства. Более двадцати специализированных фирм из<br />
Японии, <strong>Н</strong>орвегии, Германии, Великобритании и США, являются ведущ<strong>им</strong>и в мире. Крупным производителем<br />
недорогой гидроакустической аппаратуры стал Китай.<br />
Российские производители гидроакустики, за исключением гидроакустики для военных нужд,<br />
зан<strong>им</strong>ают в основном нишу аппаратуры специального назначения, выпускаемую небольш<strong>им</strong>и партиями.<br />
Потребителями гидроакустической техники российского производства, как правило, являются заказчики<br />
из государственных структур, пр<strong>им</strong>еняющие аппаратуру в системах безопасности на акваториях. В тоже<br />
время есть пр<strong>им</strong>еры выхода на рынок небольших частных отечественных компаний, разрабатывающих и<br />
производящих гидролокаторы бокового обзора, профилографы и другую сложную гидроакустическую<br />
технику.<br />
Учитывая возрастающие темпы строительства новых судов, в ближайшие годы возрастет потребность<br />
в эхолотах, рыбопоисковых гидролокаторах, гидролокаторах бокового обзора, профилографах и<br />
системах позиционирования. Разработка и производство конкурентноспособной гидроакустической аппаратуры<br />
является одн<strong>им</strong> из направлений реализации Федеральной целевой программы «Развитие гражданской<br />
морской техники на 2009-2016 г.г.<br />
Перспективными направлениями развития речной гидроакустики являются:<br />
- Включение гидроакустических систем в системы более высокого уровня, напр<strong>им</strong>ер, в автоматизированные<br />
системы управления движением судна, позволяющее сохранять гидроакустическую<br />
информацию, обрабатывать ее и выдавать по запросу в системы высшего уровня (АСУ<br />
управления транспортом).<br />
- Совершенствование математического обеспечения обработки гидроакустической информации,<br />
позволяющее автоматизировать процесс обнаружения и классификации подводных объектов.<br />
- Создание базы данных параметров гидрологии водоемов с учетом сезонных изменений.<br />
- <strong>Н</strong>асыщение рынка гидроакустической аппаратуры приборами отечественного производства.<br />
262
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
- Достаточное обеспечение государственных служб, ответственных за безопасность на внутренних<br />
водоемах, гидроакустической техникой с учетом возрастания угроз и роста интенсивности<br />
использования внутренних водных путей.<br />
- Разработка гидроакустической техники для решения особых задач, таких как задача отпугивания<br />
рыбы от объекта (напр<strong>им</strong>ер, водозабора), обнаружения браконьерских сетей, обнаружения<br />
боеприпасов в толще ила и торфа и т.д.[2]<br />
- Оснащение гидроакустической техникой телеуправляемых[3] и автономных[4] подводных аппаратов,<br />
пр<strong>им</strong>еняемых для задач мониторинга объектов на дне водоемов, состояния гидротехнических<br />
сооружений, контроля работоспособности стационарной гидроакустической аппаратуры.<br />
Пр<strong>им</strong>ер оснащения гидроакустической техникой можно показать на опыте спасателей США и Канады.<br />
Для поиска затонувших объектов, в том числе утопленников на реках и озерах, спасатели используют<br />
систему из двух устройств: буксируемый гидролокатор бокового обзора (ГБО) - малогабаритный<br />
телеуправляемый подводный аппарат. С помощью такой системы становится возможным обнаруживать и<br />
подн<strong>им</strong>ать объекты, в том числе утопленников, на глубинах, недоступных водолазам, осуществлять поиск<br />
независ<strong>им</strong>о от времени года и времени суток, существенно снижать время поиска за счет широкой полосы<br />
сканирования ГБО. <strong>Н</strong>апр<strong>им</strong>ер, при буксировке ГБО с превышением на 30 метров от дна, ширина полосы<br />
сканирования составляет до 60 метров. Кроме того, высокая частота приёмо-передающей антенны гидролокатора<br />
бокового обзора (600 кГц и выше) позволяет сравнительно легко и быстро классифицировать<br />
объект поиска на фоне остальных элементов дна.<br />
Значительно увеличить производительность подводных работ позволяет пр<strong>им</strong>енение гидроакустических<br />
систем позиционирования (ГСП). ГСП предназначены для определения точных координат подводных<br />
объектов, а также для отслеживания траектории движения и текущей глубины нахождения подводных<br />
аппаратов и водолазов в реальном масштабе времени. ГСП представляют собой один или несколько<br />
стационарных передающих гидроакустических маяков, установленных на морском дне или судне носителе,<br />
маяк-ответчик на перемещающемся или стационарном объекте, ППА или гидрофон на судне-носителе<br />
и систему обработки и выдачи информации на борту судна-носителя. ГСП по своей сути является относительной<br />
системой координат с судном-носителем в центре отсчёта. При использовании системы<br />
ГЛО<strong>Н</strong>АСС/GPS возможно позиционирования в абсолютных географических координатах.<br />
Задача развития речной гидроакустики должна решаться совместно с задачей возрождения судоходства<br />
на внутренних водных путях, восстановления судостроительной промышленности, а в более глобальном<br />
плане – с задачей инновационного развития всей отечественной науки и промышленности.<br />
Л И Т Е Р А Т У Р А<br />
1. Карлик Я.С., Марапулец Ю.В. Рыболовная гидроакустика // КамчатГТУ 2004. – 260 с.<br />
2. Бахарев С.А. Особенности калибровки антенн современных рыбопоисковых гидролокаторов // Международная <strong>Н</strong>ТК «Рыбохозяйственные<br />
исследования Мирового океана». Ч. 1. – Вл-к.: Дальрыбвтуз, 1999. – С.71-73.<br />
3. Бахарев С.А., Дремлюга Г.П., Рогожников А.В. Использование автономных необитаемых подводных аппаратов в процессе<br />
изучения Мирового океана // Морская радиоэлектроника: журн. – 2010. – №3–4. – С.80-86.<br />
4. Автономные необитаемые подводные аппараты / Под общ. ред. Акад. М.Д. Агеева.. – Вл-к.: Дальнаука, 2000. – 272 с.<br />
УДК 542.34<br />
Саакян А.А., Савицкий В.В.<br />
ИССЛЕДОВА<strong>Н</strong>ИЕ ХАРАКТЕРИСТИК МЕТОДА ОБ<strong>Н</strong>АРУЖЕ<strong>Н</strong>ИЯ С<strong>Н</strong>Ч МОДУЛЯЦИИ<br />
В<strong>Н</strong>ЕШ<strong>Н</strong>ИХ АКУСТИЧЕСКИХ ПОЛЕЙ<br />
Филиал №3 ОАО"Концерн"Ц<strong>Н</strong>ИИ"Электроприбор". Россия,117036,<br />
Москва, ул. Шверника, д.4. Тел: (495) 660-23-02; Факс: (495) 660-58-66.<br />
E-mail: savitsky@progs.igas.ru.<br />
В работе приведены результаты исследования характеристик предложенного авторами практического метода решения<br />
задачи обнаружения сверхнизкочастотной (С<strong>Н</strong>Ч) амплитудной модуляции акустических полей естественного или искусственного<br />
происхождения, возникающей вследствие их вза<strong>им</strong>одействия с областью возмущения, образуемой движущ<strong>им</strong>ися<br />
подводными объектами в условиях реального гидроакустического канала. Характеристики предложенного спектрального<br />
метода получены экспер<strong>им</strong>ентально с использованием большого числа натурных записей, произведенных в условиях различных<br />
гидрологий мелкого и глубокого морей в экспедициях А<strong>Н</strong> РФ.<br />
В работе рассматривается метод обнаружения движущихся подводных объектов, связанный с использованием<br />
эффекта С<strong>Н</strong>Ч модуляции акустического поля внешних шумов (шумов морской среды, шумов<br />
судоходства и т.д.), создаваемого движущ<strong>им</strong>ся в подводном положении объектом. Движущийся объект<br />
порождает присоединенные внутренние волны [1], вызывающие периодическую фокусировку и расфокусировку<br />
акустических лучей звука (сторонних по отношению к движущемуся погруженному объекту<br />
263
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
источников), проходящих через возмущенную движущ<strong>им</strong>ся объектом область. При приеме на гидроакустическую<br />
антенну сигнала с направлений, указывающих на возмущенную область, наблюдается С<strong>Н</strong>Ч<br />
модуляция внешних акустических полей, которая, так<strong>им</strong> образом, может быть использована в качестве<br />
признака наличия движущегося в подводном положении объекта. Глубина модуляции зависит от интенсивности<br />
внешних шумов, не подвергшихся С<strong>Н</strong>Ч модуляции, которые считаются помехой. Как было отмечено<br />
в [2], задача обнаружения движущихся подводных объектов сводится к обнаружению создаваемых<br />
<strong>им</strong>и областей возмущения, которое, в свою очередь, сводится к обнаружению С<strong>Н</strong>Ч модуляции в сигнале,<br />
приходящем на гидроакустическую антенну с соответствующего направления.<br />
Модулирующий сигнал является либо квазигармоническ<strong>им</strong>, либо сложным полигармоническ<strong>им</strong><br />
колебанием, основная частота которого определяется скоростью и водоизмещением движущегося подводного<br />
объекта. По этой причине в алгоритм обнаружения С<strong>Н</strong>Ч модуляции в сигнале в качестве предварительного<br />
этапа было введено корреляционное преобразование, позволяющее увеличить мощность основной<br />
гармоники (т.е. гармоники с мин<strong>им</strong>альной частотой и макс<strong>им</strong>альной средней мощностью) относительно<br />
прочих.<br />
Модель амплитудно-модулированного сигнала <strong>им</strong>еет вид:<br />
n<br />
∑<br />
sam() t = s()(1 t + Ai cos( Ω<br />
it+<br />
φi<br />
))<br />
i=<br />
1<br />
, (1)<br />
где Ai<br />
≤ 0.5 – коэффициент модуляции i -й гармоники<br />
Ω ≤ – частота модуляции i -й гармоники<br />
i<br />
F mod_ max<br />
st ()– стационарный случайный процесс (возмущение среды).<br />
<strong>Н</strong>еобход<strong>им</strong>о определить модулирующий сигнал sΩ<br />
() t = ∑ Aicos( Ω<br />
it+<br />
φi)<br />
и затем, оценив спектр<br />
i=<br />
1<br />
модулирующего сигнала и обнаружив в нем все ДС, определить частоты модуляции. Для этого квадрат<br />
несущей sam()<br />
t во временной области интегрируется на интервалах времени<br />
1<br />
∆t AO<br />
≈ , определяемых<br />
макс<strong>им</strong>альной частотой модуляции. Результат сохраняется во временном буфере и по мере появления<br />
2Fmod_ max<br />
достаточного числа отсчетов используется для вычисления очередной выборки спектра амплитудной огибающей<br />
в соответствующем диапазоне. Квадрат несущей интегрируется на интервалах времени, определяемых<br />
верхней частотой частотного диапазона. Прежде всего, вычисляется сигнал несущей во временной<br />
области s(t) :<br />
i<br />
εβ<br />
1 1<br />
(<br />
&<br />
i<br />
εβ )<br />
s (t)=ifft S (mf)<br />
i<br />
s(i ⋅ N +t) = s (t)<br />
vbr<br />
εβ<br />
Затем квадрат несущей интегрируется:<br />
N AO −1<br />
* 2<br />
Ω() = ∑ ( ⋅<br />
AO<br />
+ )<br />
i=<br />
0<br />
s t s t N i<br />
1<br />
,<br />
Алгоритм поиска дискретных составляющих (ДС) спектра сигнала предназначен для выделения<br />
ДС из сигнала, являющегося суммой некоторого количества ДС и шумоподобной сплошной части спектра.<br />
Для этого строится статистика ОСП, которая на участках существования ДС должна равняться отношению<br />
мощностей сигнала (ДС) и сплошной части, а на прочих участках должна представлять собой реализацию<br />
нормированного гауссовского случайного процесса. Интервалы, где статистика ОСП превышает<br />
заданный порог, считаются содержащ<strong>им</strong>и ДС. Порог обнаружения ДС вычисляется исходя из заданных<br />
вероятности правильного обнаружения ДС и среднего на цикл выдачи числа ложных ДС.<br />
264<br />
n<br />
t= 0,1,...N − 1<br />
, vbr , i=0,1,2,... (2)<br />
, t=0,1,2,... . (3)<br />
Затем вычисляется спектр мощности амплитудной огибающей и выполняется корреляционное<br />
преобразование:<br />
( ) 2<br />
Ω<br />
,<br />
i<br />
[ Reifft( S ( ω)<br />
)] 2<br />
i *<br />
SΩ( ω) = fft s ( t)<br />
vbr<br />
vbr<br />
i=0,1,2,... t=i ⋅ N ,...,(i+1) ⋅N − 1<br />
AO<br />
AO ,<br />
ˆ i<br />
SΩ ( ω)<br />
= fft<br />
Ω<br />
, (4)<br />
где N – размер выборки в отсчетах.<br />
vbr<br />
AO
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Статистика ОСП Q вычисляется согласно формуле:<br />
S−<br />
E( N)<br />
Q =<br />
DN ( )<br />
, (5)<br />
где S – исходный сигнал, E(N) – оценка математического ожидания сплошной части спектра, а D(N) –<br />
оценка ее дисперсии. Так<strong>им</strong> образом, Q является суммой реализаций нормированного гауссовского случайного<br />
процесса и ОСП дискретных составляющих, отличного от нуля только на интервалах существования<br />
ДС.<br />
Для апробации построенного алгоритма обнаружения С<strong>Н</strong>Ч модуляции был использован массив<br />
натурных записей шумов моря, произведенных в присутствии движущихся подводных объектов. Все натурные<br />
записи, которыми располагали авторы, были произведены для близко расположенных целей (дистанция<br />
в основном не превышала 8 км). Для исследования помехоустойчивости алгоритма, а также предельной<br />
дальности обнаружения, необход<strong>им</strong>о располагать больш<strong>им</strong> количеством записей с различными<br />
значениями ОСП, в т.ч. вблизи порога обнаружения. По этой причине для получения нужных значений<br />
ОСП было решено использовать модельный аддитивный шум заданной мощности. Завис<strong>им</strong>ость ОСП от<br />
дистанции до цели устанавливалась при помощи рассматриваемой ниже модели [5].<br />
Модель сигнала, содержащего С<strong>Н</strong>Ч компонент, поступающего с выбранного направления, может<br />
быть представлена в виде:<br />
Ut () = At () ⋅ nm() t+<br />
nc()<br />
t<br />
, (6)<br />
где A()<br />
t – модулирующий сигнал,<br />
n () t – сумма внешних шумов, прошедших через область возмущения (и, соответственно, подвергшихся<br />
С<strong>Н</strong>Ч модуляции) при распространении от шумового источника до точки<br />
m<br />
приема,<br />
n () t – сумма шумов, не подвергшихся С<strong>Н</strong>Ч модуляции.<br />
c<br />
К помехе относятся шумы, источники которых расположены на пеленгах возмущенной зоны, но<br />
ближе нее, а также на всех остальных пеленгах (для всех значений дальности). При пространственновременной<br />
обработке сигнала вклад каждого шумового источника в суммарную помеху определяется характеристиками<br />
направленности пространственно-частотных каналов.<br />
Вклад каждого шумового источника в компоненты n () t и n () t определяется координатами<br />
m<br />
c<br />
шумового источника, носителя и координатами и размером возмущенной области. Очевидно, что в n () t<br />
суммируются шумы от источников, расположенных внутри возмущенной области, а также за ней (относительно<br />
точки приема).<br />
Отношение сигнал/помеха по несущей С<strong>Н</strong>Ч – модулированного сигнала можно оценить по формуле:<br />
T<br />
2 2<br />
∫ A () t ⋅ n ()<br />
0<br />
m<br />
t ⋅ dt<br />
ρ =<br />
T<br />
2<br />
∫ n ()<br />
0 c<br />
t ⋅ dt<br />
(7)<br />
Если считать модулирующий сигнал гармоническ<strong>им</strong>: At () = 1+ m⋅sin( ω ⋅ t+ ϕ ), где m – коэффициент<br />
модуляции, то ОСП в амплитудной огибающей С<strong>Н</strong>Ч модулированного сигнала выражается<br />
0<br />
формулой [3]:<br />
2<br />
∆f<br />
2 ρ<br />
Θ= N ⋅ ⋅m<br />
⋅<br />
2<br />
max( ∆F<br />
, ∆ F) ( ρ + 1)<br />
СА<br />
, (8)<br />
где ρ - ОСП по несущей, определяемое по формуле (2),<br />
∆ F - ширина полосы частот модулирующего процесса, Гц;<br />
∆f<br />
- ширина полосы частот несущей, Гц;<br />
∆F СА<br />
-полоса узкополосного спектрального анализа, Гц;<br />
N -число накоплений энергетического спектра АО.<br />
Для оценки величины ОСП, в соответствии с предложенной моделью С<strong>Н</strong>Ч модулированного сигнала<br />
и формулой (2), рассчитывались теоретические мощности полезного сигнала, т.е. шумов моря, прошедших<br />
через зону возмущения и подвергшихся С<strong>Н</strong>Ч модуляции, и помехи, т.е. шумов, не подвергшихся<br />
С<strong>Н</strong>Ч модуляции. Шумы моря моделировались с помощью специально разработанной программы, осно-<br />
265<br />
m
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
ванной на подходе, изложенном в [4]. Учитывая принятое допущение о том, что направление на центр области<br />
возмущения совпадает с направлением главного лепестка Х<strong>Н</strong> антенны, к помехе были отнесены<br />
шумы, источники которых находятся в пределах ширины главного лепестка Х<strong>Н</strong> и удалены на расстояние<br />
от 0 до ближней границы зоны возмущения D , а к полезному сигналу были отнесены шумы, источники<br />
которых удалены на расстояние от D до +∞ . Кроме того, к мощности помехи была прибавлена мощность<br />
шумов моря, поступающих через боковые лепестки Х<strong>Н</strong>. ОСП в огибающей вычислялась по формуле<br />
Рис. 1. Завис<strong>им</strong>ость величины ОСП в АО от дистанции до цели. Баренцево море (з<strong>им</strong>а).<br />
(3). Величина коэффициента модуляции была принята равной 0.1. Полученные завис<strong>им</strong>ости величины<br />
ОСП в амплитудной огибающей от дистанции для гидрологии мелкого и глубокого морей изображены на<br />
рис. 1 и 2, соответственно. Предельная дальность обнаружения, для которой теоретическое ОСП в огибающей<br />
достигает пороговой величины 5 (в шкале относительных единиц – разов), составила 20 и 100 км.,<br />
соответственно.<br />
Рис. 2. Завис<strong>им</strong>ость величины ОСП в АО от дистанции до цели. <strong>Н</strong>орвежское море (лето).<br />
Далее, используя массив натурных записей, суммирующихся с модельным шумом требующейся<br />
мощности, были вычислены экспер<strong>им</strong>ентальные оценки завис<strong>им</strong>ости вероятности обнаружения С<strong>Н</strong>Ч<br />
Рис. 3. Завис<strong>им</strong>ость интервала времени наблюдения от дистанции. Баренцево море (з<strong>им</strong>а).<br />
модуляции от дистанции до цели. Вероятность обнаружения оценивалась как отношение числа выборок<br />
сигнала, в которых произведено обнаружение, к общему числу выборок. Длительность анализируемой<br />
выборки была выбрана равной 640 сек. Далее была произведена оценка длительности интервала наблюдения<br />
за целью, необход<strong>им</strong>ого для принятия с заданной вероятностью гипотезы о наличии движущегося<br />
подводного объекта. Был выбран простой критерий, согласно которому решение о наличии цели прин<strong>им</strong>ается<br />
при обнаружении С<strong>Н</strong>Ч модуляции в одной анализируемой выборке длительностью 640 сек. Считается,<br />
что выборки некоррелированны. Вероятность обнаружения цели была выбрана равной 0.9. Полученные<br />
завис<strong>им</strong>ости представлены на рис. 3–4.<br />
266
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Рис. 4. Завис<strong>им</strong>ость интервала времени наблюдения от дистанции. <strong>Н</strong>орвежское море (лето).<br />
Получены следующие оценки. В мелком море мин<strong>им</strong>альное время наблюдения за целью составляет<br />
10.7 мин. для дистанций до 15 км., 21.3 мин. для дистанций до 20 км. и 32 мин. для дистанций до 25 км.<br />
В глубоком море мин<strong>им</strong>альное время наблюдения за целью составляет 10.7 мин. для дистанций до 80 км.,<br />
21.3 мин. для дистанций до 110 км. и 32 мин. для дистанций до 120 км.<br />
Полученные экспер<strong>им</strong>ентально оценки в целом согласуются с теоретическ<strong>им</strong>и: обнаружение движущихся<br />
подводных объектов при интервалах наблюдения за целью порядка 10 мин возможно на дистанциях<br />
до 15 км. в мелком и до 80 км. в глубоком морях.<br />
Л И Т Е Р А Т У Р А<br />
1. В.А.Гордиенко "Векторно-фазовые методы в акустике". Москва. Физматлит. 2007г.<br />
2. Саакян А.А., Савицкий В.В. "Эффективность методов обнаружения С<strong>Н</strong>Ч модуляции шумового сигнала в гидроакустическом<br />
канале". Сборник трудов ХХII сессии РАО. Том 2. Москва. ГЕОС. 2010г. с.322-325.<br />
3. А.А.Кудрявцев, К.П.Лугинец, А.И.Машошин "Об амплитудной модуляции подводного шумоизлучения гражданских судов".<br />
<strong>Акустический</strong> журнал. 2003г. Том 49. №2. с.224-228.<br />
4 А.В.Фурдуев. "Шумы океана". В кн. "Акустика океана" (под редакцией Л.М.Бреховских). Москва. <strong>Н</strong>аука. 1974 г.<br />
5 Саакян А.А., Савицкий В.В. "Разработка метода выделения С<strong>Н</strong>Ч модуляции шумов морской среды". Доклады XIII школы-семинара<br />
<strong>им</strong>. акад. Л.М.Бреховских "Акустика океана". Москва. ГЕОС. 2011г.<br />
УДК 551.463.2, 551.466.3<br />
Б.М. Салин, М.Б. Салин<br />
МЕТОДЫ РАСЧЕТА ОС<strong>Н</strong>ОВ<strong>Н</strong>ЫХ ХАРАКТЕРИСТИК РЕВЕРБЕРАЦИИ,<br />
ОБУСЛОВЛЕ<strong>Н</strong><strong>Н</strong>ОЙ РАССЕЯ<strong>Н</strong>ИЕМ <strong>Н</strong>ИЗКОЧАСТОТ<strong>Н</strong>ЫХ ТО<strong>Н</strong>АЛЬ<strong>Н</strong>ЫХ И ТО<strong>Н</strong>АЛЬ<strong>Н</strong>О-<br />
ИМПУЛЬС<strong>Н</strong>ЫХ СИГ<strong>Н</strong>АЛОВ <strong>Н</strong>А ВЗВОЛ<strong>Н</strong>ОВА<strong>Н</strong><strong>Н</strong>ОЙ ПОВЕРХ<strong>Н</strong>ОСТИ МОРЯ<br />
Институт прикладной физики РА<strong>Н</strong><br />
Россия, 603950, <strong>Н</strong>.<strong>Н</strong>овгород, ул. Ульянова, д. 46<br />
Тел.: (831)416-47-46<br />
Email: salin@hydro.appl.sci-nnov.ru, mikesalin@hydro.appl.sci-nnov.ru<br />
Для бистатической схемы локации на тональных и тонально-<strong>им</strong>пульсных сигналах в условиях мелкого моря рассматривается<br />
задача об оценке параметров реверберационного сигнала, обусловленного рассеянием звуковых волн на взволнованной<br />
поверхности. <strong>Н</strong>айдены относительно простые схемы расчета, позволяющие пересчитывать трехмерные пространственно–временные<br />
спектры волнения в частотно-угловые характеристики реверберации, а также определять<br />
местоположение областей поверхности, вносящий основной вклад в интегральный уровень реверберации. Для типовых<br />
параметров ветрового волнения, характерного для мелководных водоемов, выполнен расчет спектра реверберации и<br />
произведена оценка частотной завис<strong>им</strong>ости локальной силы цели рассеяния, рассчитанной с использованием усредненных<br />
по углу 3D спектров волнения.<br />
Рассеяние на поверхностном волнении является основным фактором уширения спектра низкочастотных<br />
тональных и тонально <strong>им</strong>пульсных сигналов, распространяющихся в мелком море. Один из наиболее<br />
вероятных механизмов формирования реверберационного сигнала в низкочастотном диапазоне –<br />
это брэгговское рассеяние акустических волн на пространственной структуре ветрового волнения [1-4].<br />
Этот механизм основывается на отражении акустического сигнала от движущихся цугов поверхностных<br />
волн при выполнении известных условий относительно соотношения проекций волновых векторов акустических<br />
и ветровой волн.<br />
<strong>Н</strong>астоящая работа посвящена вопросам расчета основных параметров реверберации по известным<br />
характеристикам ветрового волнения, которые, в свою очередь, наиболее полно описываются величиной<br />
G<br />
2 ( K , Ω)<br />
- спектральной плотностью мощности поверхностного волнения на круговой частоте Ω при<br />
значении волнового вектора равного K (далее – 3D спектр, способ измерения которого описан в [5]). В<br />
267
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
работах [3,4] нами было получено выражение, которое позволяет рассчитать нормированный спектр реверберации<br />
для случая тональной подсветки мелководной акватории:<br />
2 2 M , N 2 2<br />
2<br />
2<br />
2π k r sin ( ) sin ( ) (<br />
,<br />
( ), )<br />
о<br />
χm ⋅ χ G −signΩ⋅K<br />
n<br />
mn<br />
r Ω<br />
pnorm<br />
( ro<br />
, Ω ) = ds<br />
3 ∑<br />
×<br />
(1)<br />
H χ*<br />
mn , cos( χm) ⋅ cos( χn)<br />
∫<br />
r r-r<br />
S<br />
0<br />
Здесь p 2 norm(r 0 ,Ω) - отношение спектральной плотности мощности реверберации в точке r o (см.<br />
рис.1) к квадрату амплитуды прямого сигнала p(r 0 ), измеренного в той же точке:<br />
pr (<br />
o) = po 2χ*<br />
rH<br />
(2)<br />
o<br />
k - волновое число акустической волны; H – характерная глубина волновода; χ ∗ - угол захвата лучей в<br />
волноводе; суммирование по m, n проводится по полному набору излученных (M) и приняты (N) мод однородного<br />
волновода с «модовыми» углами скольжения χ m ,χ n и продольными волновыми числами k m , k n<br />
соответственно; r, r o - вектора, определяющие координаты точки рассеяния и точки приема относительно<br />
точки расположения излучателя (см. рис.1); K m,n (r) - волновой вектор поверхностного волнения, задаваемый<br />
равенством<br />
r r−<br />
ro<br />
Kmn ,<br />
( r) = km + k<br />
(3)<br />
n<br />
r r−<br />
ro<br />
Спектр волнения G 2 (K,Ω) и вектора r, r 0 взяты в единой системе координат, что позволяет автоматически<br />
находить угол между акустической трассой и направлением ветра (основное направление<br />
волнения).<br />
Вычисление спектра реверберации по формуле (1) формально сводится к следующему. Поверхность<br />
акватории, на которой располагается трасса распространения, разбивается на отдельные локальные<br />
области рассеяния (см. рис.1). Для каждой области, характеризуемой вектором r, и каждой пары<br />
мод m,n находится согласно (3) волновой вектор поверхностного волнения Kmn<br />
,<br />
( r ), для которого выполняется<br />
условие брэгговского синхронизма. Затем производится выборка значения трехмерного спектра<br />
ветрового волнения G ( K<br />
2<br />
mn ,<br />
, Ω)<br />
, соответствующего допплеровской частоте Ω/2π и указанному<br />
вектору K (с точностью до знака для положительных и отрицательных Ω). Это значение в основном и<br />
будет определять уровень рассеяния от локальной области. Полученные для каждого участка поверхности<br />
и каждой пары мод амплитуды рассеянного сигнала в дальнейшем некогерентно суммируются.<br />
Волновой вектор<br />
рассеянной<br />
акустической<br />
волны<br />
r<br />
k n<br />
k n<br />
k m<br />
k m<br />
Волновой вектор<br />
падающей<br />
акустической<br />
волны<br />
Локальная<br />
область<br />
рассеяния<br />
k n<br />
k m,n<br />
k m<br />
Суммарный<br />
волновой<br />
вектор<br />
K ветровой<br />
волны<br />
<strong>Н</strong>аправления<br />
прихода<br />
реверберации<br />
Источник<br />
r o<br />
Приемная<br />
антенна<br />
Рис. 1. Блок-схема, поясняющая геометрию расположения и схему расчета уровня реверберации<br />
Формула (1) выведена по методу малых возмущений, справедливому при выполнении условия Рэлея<br />
ka sin χ ∗ < 1, где 2a - эффективное значение высоты волны (от вершины до впадины). Для проведения<br />
численного счета удобно переписать (1) следующ<strong>им</strong> образом. Пусть G<br />
2 ( K , Ω)<br />
задан в виде массива<br />
на сетке K ij ={K xi ,K yj }, Ω l , а интеграл по площади дискретизован на сетке r uv ={x u ,y v } c площадью<br />
ячейки ∆s. Тогда выражения, стоящие при элементах массива G 2 (K ij ,Ω l ) могут быть собраны виде массива<br />
весов (см. рис. 2):<br />
268
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Ky, м -1<br />
G 2 (Ω), dB rel. 1 m 2 / Hz<br />
W<br />
( K<br />
ij )<br />
K x , м -1<br />
Рис.2. Весовые множители W (м -4 ), рассчитанные<br />
согласно (4) с параметрами: χ * =26.7°, H = 20 м, скорость<br />
звука C=1500 м/с, f= 1500 Гц, N=M=18 (при<br />
заданных параметрах), r 0 =400 м (r 0 ={0,400}), производилось<br />
интегрирование по площади 2400м x 1600м<br />
с элементарной площадкой 1.5м x 1 м.<br />
2 2 2 2<br />
2π kro sin ( χm) ⋅sin ( χn)<br />
i, j, u, v, m,<br />
n<br />
3 ∑<br />
s∑<br />
H χ*<br />
mn , cos( χm ) ⋅ cos( χn ) uv , ruv ruv<br />
-r0<br />
= ×∆<br />
Рис.3. Одномерная спектральная плотность мощности<br />
волнения G<br />
2 ( Ω ), измеренная на оз. Ладога:<br />
сплошная линия - прямое измеренная в точке;<br />
пунктир - восстановленная путем интегрирования<br />
G<br />
2 ( K , Ω ) по K; жирные точки – модельный<br />
спектр для неразвитого волнения, состоящий из<br />
спектра Пирсона-Московица в <strong>Н</strong>Ч части и спектра<br />
Тоба в ВЧ части [7].<br />
где δ i,j,u,v,m,n – величина, аналогичная δ-с<strong>им</strong>волу Кронекера, равная 1, если вектор K mn (r uv ), который<br />
задается (3) соответствует K ij как ближайшему дискретному значению из сетки пространственных векторов,<br />
на которой определен спектр G<br />
2 ( K , Ω)<br />
.<br />
δ<br />
Ω/2π, Hz<br />
(4)<br />
1.0 Гц 1.3 Гц 2.2 Гц<br />
дБ отн. 1 м 4 /Гц<br />
Ky, м -1<br />
K x , м -1 K K x , м -1<br />
x , м -1<br />
Рис. 4. Сечения трехмерной спектральной плотности мощности поверхностного волнения G 2 (K,Ω),<br />
измеренного в экспер<strong>им</strong>енте на оз. Ладога. Линии равного уровня проведены через 5дБ. <strong>Н</strong>а графики<br />
нанесены окружности, ограничивающие область векторов K, удовлетворяющих дисперсионному<br />
соотношению для глубокой воды с учетом разрешение спектрального анализа ∆Ω/2π=0.1Гц.<br />
Искомый спектр реверберации найдем в виде суммы взвешенных значений 3D спектра:<br />
2 2<br />
рnorm ( ±Ω<br />
l<br />
) = ∑W( Kij ) ⋅G<br />
( m Kij , Ωl<br />
)<br />
(5)<br />
i,<br />
j<br />
Следует отметить, что в литературе практически отсутствуют экспер<strong>им</strong>ентальные данные по 3D спектрам<br />
волнения, необход<strong>им</strong>ым для расчета характеристик реверберации. Обычно измеряются одномерные спектры<br />
волнения G 2 (Ω) (см. рис.3), затем согласно определенным моделям выполняется теор. расчет полного<br />
спектр G 2 (K,Ω) [1].<br />
Теоретические выводы, изложенные в разделе 2, могут быть сопоставлены с результатами экспер<strong>им</strong>ента,<br />
состоящего из одновременных акустических измерений и измерений спектра поверхностного волнения.<br />
Экспер<strong>им</strong>ент проводился в заливе оз. Ладога в 2010 г. <strong>Н</strong>а рис. 3 и 4 изображены одномерный<br />
269
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
спектр и сечения 3D спектров поверхностного волнения, полученные по схеме измерений [5]. Данные<br />
представленные на рисунках взяты из работы [6].<br />
Акустическая часть экспер<strong>им</strong>ента состояла из излучения на различных частотах f тонального сигнала<br />
и прием на горизонтальную 32-элементную антенну, расположенную на глубине 10м (остальные параметры<br />
трассы содержатся в подписи к рис. 2.).<br />
p 2 norm(Ω), дБ (Гц -1/2 )<br />
σ 2 loc(fi,Ω) дБ<br />
Ω/2π, Гц<br />
Рис.5. Спектральная плотность мощность<br />
реверберации акустического сигнала: полученная в<br />
экспер<strong>им</strong>енте (черная кривая) и рассчитанная (серая<br />
кривая) на основе измеренных спектров<br />
поверхностного волнения. Оз. Ладога<br />
270<br />
Ω/(2π) Гц<br />
Рис. 6. Частотная завис<strong>им</strong>ость (в дБ отн 1/Гц)<br />
локальной силы цели рассеяния σ 2 loc(f i ,Ω),<br />
рассчитанной с использованием усредненных по<br />
углу 3D спектров волнения. Частоты<br />
акустического сигнала f i = 200; 400; 750; 1000;<br />
1500 и 2000Гц.<br />
<strong>Н</strong>а рис. 5 более темной линией изображена, полученная в экспер<strong>им</strong>енте, спектральная плотность<br />
мощности акустической реверберации (частота источника f=1.5 кГц). Путем перемножения весовых коэффициентов<br />
(рис. 2) на измеренные спектры волнения (рис 4), находились расчетные значения уровня<br />
реверберации – светлая кривая на рис 5.<br />
Как видно из рисунка, рассчитанные и реально измеренные уровни находятся в хорошем согласии.<br />
Из-за недостатка объема публикации здесь не излагаются результаты по антенным измерениям и не приводятся<br />
данные по частотам, отличным от f=1.5 кГц<br />
При моностатической схеме локации (r o =0) и использовании тональных <strong>им</strong>пульсов большой длительностью<br />
(5-10 с), выражения для рассеянного сигнала существенно упрощается. Равенство (3) для<br />
расчета K m,n (r) заменяется следующ<strong>им</strong> соотношением:<br />
r r−<br />
ro<br />
r r<br />
Kmn ,<br />
( r) = km + kn = ( km+ kn) ≈ 2k<br />
(6)<br />
r r−<br />
ro<br />
r r<br />
С учетом (6), можно записать выражение для ненормированного реверберационного сигнала (выраженное<br />
в абсолютных единицах произведение (1) на квадрат (2) при r >> H):<br />
2 2 2 2 2<br />
2<br />
2 ⎛r<br />
⎞ 4π k p sin ( ) sin ( ) ( 2 , )<br />
o<br />
χm ⋅ χ G −signΩ⋅ kr<br />
r Ω<br />
n<br />
рrev<br />
⎜ , Ω ⎟= ds<br />
4 ∑<br />
×<br />
(7)<br />
2<br />
⎝r ⎠ H mn , cos( χm) ⋅cos( χn)<br />
∫<br />
r<br />
S<br />
Как видно из (7), спектр рассеянного сигнал, приходящего с направления r/r, будет определяться<br />
значениями трехмерного спектра волнения также относящ<strong>им</strong>ися только к данному направлению<br />
Исходя из выражения (7), полученного для однородного волновода глубиной H, можно ввести<br />
аналогично [8] локальную, приведенную к 1м 2 , силу цели (СЦ) поверхностного рассеяния в виде:<br />
2 −1 4 2 2 2<br />
σloc ( r r, f, Ω ) = 9 k sin ( χM )sin ( χN<br />
) × G ( −signΩ⋅2 kr r, Ω)<br />
(8)<br />
зависящую от несущей частоты f, направления локации r r и доплеровского сдвига частоты Ω/2π.<br />
Основываясь на выражении (8) и экспер<strong>им</strong>ентальных данных по 3D спектрам волнения для диапазона<br />
частот 0.4 – 1.5кГц получена оценка спектральных характеристик локальной СЦ рассеяния звука на<br />
поверхностном волнении (см. рис 6). Здесь использованы спектры поверхностного волнения, измеренные<br />
на Балтийском море (район г. Пр<strong>им</strong>орск, 2006 г.) по описанной в [5] схеме. В экспер<strong>им</strong>енте были<br />
получены более типичные спектры волнения, чем в озерном экспер<strong>им</strong>ента. Поэтому приведенные на
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
рис.6 для частот 0.4 – 1.5кГц результаты могут в качестве предварительной оценки быть использованы<br />
при расчете реверберации в морских условиях.<br />
Л И Т Е Р А Т У Р А<br />
1 Hayek C.S., Schurman I.W., Sweeney J.H., Boyles C.A. Azimuthal dependence of Bragg scattering from the ocean surface // Journ. Acoust. Soc. Amer. –<br />
1999. – V. 105. № 4. – P.2129–2141.<br />
2 Лебедев А.В., Салин Б.М. Исследование эффектов локализации областей рассеяния звука на ветровом волнении// Акуст. журн. – 2004. – Т.50. №<br />
6. – С. 13-826.<br />
3 Salin B.M., Salin M.B., Spindel R.C. Investigation of the Influence of Wind Waves on the Spectral and Angular Characteristics of Sea Surface Reverberation<br />
from a CW Source //Proceedings of OCEANS 2010. –Seattle, USA, 2010<br />
4 Салин Б.М., Салин М.Б. Методы расчета низкочастотной поверхностной реверберации при известных характеристиках морского волнения //<br />
Акуст. журн. – 2011, в печати.<br />
5 Бородина Е.Л., Салин М.Б. Оценка пространственно-временных характеристик поверхностного волнения по видеоизображению. // Изв. РА<strong>Н</strong>.<br />
ФАО. – 2010. – Т. 46. №2. – С.263-273.<br />
6 Salin M.B., Borodina E.L., Salin B.M. Calculations of reverberation levels and patterns, based on measured surface roughness field: theory and experiment<br />
// Proc. of Forum Acusticum – Aalborg, Denmark, 2011<br />
7 Janssen P. The interaction of ocean waves and wind. – Cambridge University Press, 2004. - P.43-47.<br />
8 Урик Р. Дж. Основы гидроакустики. – Л.: «Судостроение», 1978. – C.280-283.<br />
УДК 534.222<br />
Б.А.Сальников, Е.<strong>Н</strong>.Сальникова, Л.Г.Стаценко, С.Ю.Кулик<br />
ИССЛЕДОВА<strong>Н</strong>ИЕ ЗАКО<strong>Н</strong>ОМЕР<strong>Н</strong>ОСТЕЙ ФОРМИРОВА<strong>Н</strong>ИЯ ЗВУКОВЫХ ПОЛЕЙ<br />
В М<strong>Н</strong>ОГОЛУЧЕВЫХ СЛУЧАЙ<strong>Н</strong>О-<strong>Н</strong>ЕОД<strong>Н</strong>ОРД<strong>Н</strong>ЫХ ПОДВОД<strong>Н</strong>ЫХ ВОЛ<strong>Н</strong>ОВОДАХ<br />
<strong>Н</strong>АПРАВЛЕ<strong>Н</strong><strong>Н</strong>ЫМИ ИСТОЧ<strong>Н</strong>ИКАМИ<br />
Дальневосточный государственный технический университет<br />
Россия, 690950, Владивосток, ул. Пушкинская, д.10<br />
Тел.: (4232) 45-45-77; Факс: (4232) 26-81-76<br />
E-mail: salnikovb@mail.ru; en_salnikova@mail.ru; lu-sta@mail.ru; kulikser@mail.ru<br />
В докладе изложен метод выбора углового раскрыва источника, позволяющего формировать схожие вертикальные распределения<br />
акустического поля (ВРАП) по всей длине волновода. Приведены результаты численного экспер<strong>им</strong>ента. Предложенный<br />
подход позволит районировать подводные акватории по уровню случайной компоненты поля скорости звука<br />
косвенными методами (по типу искажений функций ВРАП) вне завис<strong>им</strong>ости от вида вертикального профиля скорости<br />
звука.<br />
Основная трудность районирования подводных акваторий по уровню случайной компоненты поля<br />
скорости звука по степени изменения вида функций ВРАП заключается в том, что эти изменения зависят<br />
не только от уровня случайной компоненты поля скорости звука ∆C ≈ (x,z), но и от расстояния между источником<br />
и приёмной системой, а также от вида вертикального профиля детерминированной компоненты<br />
поля скорости звука. <strong>Н</strong>а рис. 1 приведены функции ВРАП на границах 4 верхней зоны конвергенции на<br />
дальностях 103км и 116км, источник расположен на глубине 1700м, ось подводного звукового канала расположена<br />
на глубине 1000м. Поле рассчитывалось по лучевой программе [1], количество экспер<strong>им</strong>ентов<br />
равно 1000, ∆C ≈ (x,z)=0,05м/с, угловой раскрыв источника [±5,0 ° ].<br />
А(n)<br />
0,1<br />
200м<br />
700м<br />
1150м<br />
0,08<br />
0,06<br />
150м<br />
1000м<br />
1700м<br />
0,04<br />
0,02<br />
0<br />
0 200 400 600 800 1000 1200 1400 1600 1800 2000<br />
103км 116км<br />
z, м<br />
Рис. 1. Функции ВРАП на границах 4 верхней зоны конвергенции.<br />
Раскрыв источника [±5,0 ° ], ∆С ≈ =0,05м/с<br />
271
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Цифрами на рис. 1 обозначены координаты глубин макс<strong>им</strong>умов ВРАП. При увеличении уровня<br />
случайной компоненты поля скорости звука характер изменения вида функций ВРАП различен, т.к. на<br />
дальности 103км лучи распространяются от дна к поверхности, а на дальности 116км – от поверхности<br />
моря в сторону дна. Единственная глубина, на которой координаты макс<strong>им</strong>умов ВРАП на дальности<br />
103км и 116км совпадают, равна 1000м.<br />
0,25<br />
0,2<br />
0,15<br />
0,1<br />
0,05<br />
0<br />
-5 -4 -3 -2 -1 0 1 2 3 4 5<br />
углы выхода, градусы<br />
150м 1000м 1150м 1700м<br />
Рис. 2. Угловые излучающие кластеры, формирующие акустическое поле на глубинах макс<strong>им</strong>умов функции<br />
ВРАП на дальности 103км<br />
0,2<br />
0,16<br />
0,12<br />
0,08<br />
0,04<br />
0<br />
-5 -4 -3 -2 -1 0 1 2 3 4 5<br />
углы выхода, градусы<br />
200м 700м 1000м 1700м<br />
Рис. 3. Угловые излучающие кластеры, формирующие акустическое поле на глубинах макс<strong>им</strong>умов функции<br />
ВРАП на дальности 116км<br />
A(n)<br />
0,2<br />
0,175<br />
1000м<br />
0,15<br />
0,125<br />
0,1<br />
0,075<br />
0,05<br />
0,025<br />
0<br />
0 200 400 600 800 1000 1200 1400 1600 1800 2000<br />
103км<br />
Рис. 4. Функции ВРАП на границах 4 верхней зоны конвергенции.<br />
Раскрыв источника [−2,5 ° ; +0,6 ° ], ∆С ≈ =0,05м/с<br />
<strong>Н</strong>а рис. 2 и рис. 3 изображены гистограммы угловых излучающих кластеров, формирующих аку-<br />
272<br />
116км<br />
z, м
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
стическое поле на глубинах макс<strong>им</strong>умов функций ВРАП. Из приведенных результатов следует, что угловой<br />
излучающий кластер, формирующий макс<strong>им</strong>ум поля на глубине 1000м на дальностях 103км и 116км,<br />
равен [−2,5 ° ; +0,6 ° ].<br />
Источник с угловым излучающ<strong>им</strong> раскрывом [−2,5 ° ; +0,6 ° ] формирует схожие функции ВРАП на<br />
дальностях, соответствующих границам между центрами 3 нижней зоной конвергенции и 4 верхней зоной<br />
конвергенции – 103км, и 4 верхней зоной конвергенции и 4 нижней зоной конвергенции – 116км (см. рис.<br />
4). При этом функции ВРАП <strong>им</strong>еют один ярко выраженный макс<strong>им</strong>ум. Координаты центров зон конвергенции<br />
и границ между центрами верхних и нижних зон конвергенции определялись по координатам экстремумов<br />
нормы функции ВРАП [1].<br />
A(n)<br />
0,8<br />
200м<br />
0,6<br />
0,4<br />
0,2<br />
350м<br />
450м<br />
600м<br />
800м<br />
0<br />
0 200 400 600 800 1000 1200 1400 1600 1800 2000<br />
z,м<br />
104км 105км 106км 107км 109км 110км 112км<br />
113км 114км 115км<br />
Рис. 5. Функции ВРАП в границах 4 верхней зоны конвергенции.<br />
Раскрыв источника [−2,5 ° ; +0,6 ° ], ∆С ≈ =0,05м/с<br />
<strong>Н</strong>а рис. 5 изображены функции ВРАП на дискретных дальностях в границах 4 верхней зоны конвергенции.<br />
A(n)<br />
0,2<br />
Дальность 103 км<br />
0,15<br />
0,1<br />
0,05<br />
0<br />
0 200 400 600 800 1000 1200 1400 1600 1800 2000<br />
z, м<br />
0,05м/с 0,15м/с 0,25м/с 0,5м/с 0,7м/с<br />
A(n)<br />
0,2<br />
Дальность 116км<br />
0,15<br />
0,1<br />
0,05<br />
0<br />
0 200 400 600 800 1000 1200 1400 1600 1800 2000<br />
z, м<br />
0,05м/с 0,15м/с 0,35м/с 0,6м/с 0,8м/с<br />
Рис. 6. Динамика изменений вида функций ВРАП с ростом случайной компоненты поля скорости звука<br />
273
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Из представленных результатов следует, что выбранный угловой раскрыв формирует функции<br />
ВРАП с одн<strong>им</strong> макс<strong>им</strong>умом во всём диапазоне дальностей 4 верхней зоны конвергенции. Численные экспер<strong>им</strong>енты<br />
показали, что это утверждение справедливо и для других зон конвергенции с меньш<strong>им</strong>и номерами.<br />
<strong>Н</strong>а рис. 6 представлена динамика изменения функций ВРАП с ростом уровня ∆С ≈ (x,z) на дальностях<br />
103км и 116км. Тип изменения функций ВРАП противоположен: на дальности 103км (лучи распространяются<br />
от дна к поверхности моря) макс<strong>им</strong>ум функции ВРАП смещается к поверхности; на дальности<br />
116км (лучи распространяются от поверхности моря в сторону дна) – в сторону дна. В обоих случаях сохраняется<br />
единственный макс<strong>им</strong>ум. Это даёт возможность обнаружения артефактов на трассе распространения<br />
зондирующего излучения, которые приводят к увеличению числа макс<strong>им</strong>умов функции ВРАП.<br />
Работа выполнена при поддержке федеральной целевой программы «<strong>Н</strong>аучные и научнопедагогические<br />
кадры инновационной России» мероприятие 1.2.2 «Проведение научных исследований<br />
научными группами под руководством кандидатов наук» (Гос. контракт №2524 от 20.11.09г.).<br />
Л И Т Е Р А Т У Р А<br />
1. Сальников Б.А., Сальникова Е.<strong>Н</strong>. Моделирование и исследование зональной структуры акустических полей в случайнонеоднородных<br />
подводных волноводах // Подводные исследования и робототехника / <strong>Н</strong>аучно-технический журнал ДВО<br />
РА<strong>Н</strong>, Институт проблем морских технологий. Владивосток: Дальнаука, 2008. – С. 47-57.<br />
УДК 534.222<br />
Б.А.Сальников, Е.<strong>Н</strong>.Сальникова, Л.Г.Стаценко, С.Ю.Кулик<br />
СИСТЕМА МО<strong>Н</strong>ИТОРИ<strong>Н</strong>ГА ПРИРОД<strong>Н</strong>ЫХ И А<strong>Н</strong>ТРОПОГЕ<strong>Н</strong><strong>Н</strong>ЫХ <strong>Н</strong>ЕОД<strong>Н</strong>ОРОД<strong>Н</strong>ОСТЕЙ<br />
ПОЛЯ СКОРОСТИ ЗВУКА В ПОДВОД<strong>Н</strong>ЫХ ВОЛ<strong>Н</strong>ОВОДАХ<br />
Дальневосточный государственный технический университет<br />
Россия, 690950, Владивосток, ул. Пушкинская, д.10<br />
Тел.: (4232) 45-45-77; Факс: (4232) 26-81-76<br />
E-mail: salnikovb@mail.ru; en_salnikova@mail.ru; lu-sta@mail.ru; kulikser@mail.ru<br />
Целью работы является анализ вза<strong>им</strong>одействия акустических полей подсветки в многолучевых подводных волноводах со<br />
случайно-анизотропными и локальными неоднородностями поля скорости звука (ПСЗ). Показано, что при произвольном<br />
выборе величины углового раскрыва источника приёмной системой, состоящей из одной вертикальной эквидистантной<br />
антенной решетки (ВЭАР), невозможно обнаружить наличие линз в подводном волноводе (ПВ) на фоне изменяющейся<br />
стохастичности ПСЗ. В работе обоснована принципиальная возможность выбора угла раскрыва излучающей системы,<br />
позволяющего определить наличие линз в ПВ одной ВЭАР.<br />
Просветной метод гидролокации является одн<strong>им</strong> из перспективных направлений наблюдения состояния<br />
подводных акваторий. Метод основан на анализе изменений поля подсветки водной среды, вызванных<br />
вариациями уровня случайной компоненты поля скорости звука, термоклинными линзами, донными<br />
газо-термальными выбросами и антропогенными факторами. Просветной метод гидролокации может<br />
быть успешно использован в системах непрерывного контроля технического состояния магистральных<br />
подводных трубопроводов с целью раннего обнаружения утечки объектов транспортировки и рубежных<br />
системах охраны подводных акваторий.<br />
Однако широкого практического пр<strong>им</strong>енения просветные методы гидролокации в настоящее время<br />
не нашли в связи с отсутствием надежных методов интерпретации причин изменений поля подсветки<br />
водной среды.<br />
В [1] представлены результаты компьютерного моделирования систем обнаружения локальных<br />
нарушений поля скорости звука в условиях изменяющегося уровня природной стохастичности гидрофизических<br />
параметров водной среды. Численный экспер<strong>им</strong>ент показал, что наличие линзы и изменение<br />
уровня случайной компоненты поля скорости звука характеризуются идентичными изменениями вида<br />
функций вертикального распределения акустического поля (ВРАП). В связи с эт<strong>им</strong> приёмной системой,<br />
состоящей из одной вертикальной эквидистантной антенной решетки, невозможно обнаружить линзу на<br />
фоне природной изменчивости случайной компоненты поля скорости звука. Показано, что для обнаружения<br />
локальных нарушений поля скорости в условиях изменяющегося уровня случайной компоненты необход<strong>им</strong>о<br />
отслеживать характер изменения дискретных по дальности значений нормы функции ВРАП в<br />
границах одной зоны конвергенции. При изменении уровня случайной компоненты поля скорости звука<br />
значения нормы функции ВРАП либо уменьшаются, либо увеличиваются во всём диапазоне дальностей<br />
подводного волновода. <strong>Н</strong>аличие же линзы приводит к одновременному увеличению нормы функции<br />
ВРАП на одних дискретных вертикальных разрезах и уменьшению нормы функции ВРАП на других в<br />
границах одной зоны конвергенции. Угловой раскрыв источника в численном экспер<strong>им</strong>енте соответствовал<br />
реж<strong>им</strong>у однолучевого приёма для детерминированной модели вертикального распределения скорости<br />
274
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
звука (ВРСЗ) за исключением дальностей в районе заворота лучей [1].<br />
Аналогичные результаты были получены и для случая многолучевого приёма. Здесь следует отметить,<br />
что термины «однолучевой» и «многолучевой» приём <strong>им</strong>еют смысл лишь в контексте модельных<br />
задач и используются для того, чтобы указать на исходные параметры численного экспер<strong>им</strong>ента, а <strong>им</strong>енно<br />
на величину углового раскрыва источника излучения. В реальных подводных волноводах всегда присутствует<br />
случайная компонента поля скорости звука и приём многолучевой.<br />
В численном экспер<strong>им</strong>енте источник располагался на глубине 300м, дискретность выхода лучевых<br />
траекторий − 0,1 градуса, угловой раскрыв источника ±5,7 ° , длина полигона – 120км, глубина полигона -<br />
2000м, ось подводного звукового канала располагалась на глубине 1000м.<br />
Локальная неоднородность моделировалась эллиптической термоклинной линзой. Макс<strong>им</strong>альные<br />
размеры линзы: по горизонтали 1000м; по вертикали 100м. Центр линзы располагался на глубине 650м и<br />
дальности 50км от источника, что соответствует координате границы между первой нижней и второй<br />
верхней зоной конвергенции (1<strong>Н</strong>ЗК ÷ 2ВЗК), скорость звука в центре линзы отличалась от опорной на ∆C =<br />
= ±5м/с, к краям линзы ∆C = спадала по параболическому закону до уровня опорной. Поле анализировалось<br />
на границе между четвёртой верхней и четвёртой нижней зонами конвергенции (4ВЗК ÷ 4<strong>Н</strong>ЗК) − на<br />
расстоянии x=116км от источника, фоновый уровень стохастичности соответствовал реж<strong>им</strong>у слабых<br />
флуктуаций ∆C ≈ =0,1 м/с, количество проведённых экспер<strong>им</strong>ентов 1000.<br />
A(n) 0,15<br />
0,12<br />
300м<br />
0,09<br />
0,06<br />
1200м<br />
1400м<br />
0,03<br />
1800м<br />
0<br />
0 250 500 750 1000 1250 1500 1750 2000<br />
z, м<br />
0,05 м/с 0,1 м/с 0,1 м/с -5 м/с 0,1 м/с +5 м/с 0,3 м/с<br />
Рис. 1. Сравнительный анализ вида функций ВРАП на дальности 116км. Раскрыв источника ±5,7°<br />
Численные экспер<strong>им</strong>енты показали, что изменения вида функции ВРАП, внос<strong>им</strong>ые линзой, совпадают<br />
по информативным признакам с изменениями, вызванными увеличением уровня случайной компоненты<br />
поля скорости звука: происходит смещение координаты второго макс<strong>им</strong>ума ВРАП по глубине в<br />
сторону дна.<br />
0,04<br />
0,035<br />
0,03<br />
0,025<br />
0,02<br />
0,015<br />
0,01<br />
0,005<br />
-4,8 -3,9 -1,6<br />
+2,1 +4,6 +5,4<br />
0<br />
-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6<br />
углы выхода из источника, градусы<br />
Рис. 2. Угловые излучающие кластеры, формирующие акустическое поле на глубине 1200м<br />
и дальности 116км от источника в отсутствии линз при ∆С ≈ (x,z) = 0,1м/с<br />
<strong>Н</strong>а рис. 1 представлены результаты сравнительного анализа изменений вида функций ВРАП, вызванных<br />
наличием линз и увеличением уровня случайной компоненты поля скорости звука (уровня стохастичности<br />
поля скорости звука).<br />
С увеличением стохастичности координата второго макс<strong>им</strong>ума ВРАП смещается с 1200м при<br />
∆С ≈ (x,z) = 0,05м/с до 1400м при ∆С ≈ (x,z) = 0,3м/с. <strong>Н</strong>аличие линзы как положительной, так и отрицательной<br />
при фоновой стохастичности ∆С ≈ (x,z) = 0,1м/с также смещает координату второго макс<strong>им</strong>ума на глубину<br />
1400м. <strong>Н</strong>а рис.1 по оси абсцисс отложена глубина z = ∆z⋅n – текущая координата глубины, ∆z = 50м<br />
275
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
− интервал усреднения акустического поля по глубине, n = 1÷40 – номер дискретного отчёта по глубине<br />
(дискретная координата глубины).<br />
A(n) 0,15<br />
350м<br />
500м<br />
Дальность 106км<br />
0,12<br />
0,09<br />
0,06<br />
650м<br />
1250м<br />
1400м<br />
1500м<br />
0,03<br />
0<br />
0 250 500 750 1000 1250 1500 1750 2000<br />
0,1м/с 0,1м/с -5м/с 0,1м/с +5м/с 0,5м/с<br />
z, м<br />
A(n) 0,15<br />
0,12<br />
250м<br />
Дальность 116км<br />
1200м<br />
1400м<br />
0,09<br />
0,06<br />
0,03<br />
0<br />
0 250 500 750 1000 1250 1500 1750 2000<br />
z, м<br />
0,1м/с 0,1м/с -5м/с 0,1м/с +5м/с 0,3м/с<br />
Рис. 3. Сравнительный анализ вида функций ВРАП на дальностях,<br />
соответствующих границам четвёртой верхней зоне конвергенции при раскрыве источника [-1,6 ° ; +2,1 ° ]<br />
В комплект программ стохастического моделирования распространения звука в подводных волноводах<br />
входит программа, позволяющая определить угловой излучающий кластер, формирующий акустическое<br />
поле на заданной глубине и дальности. <strong>Н</strong>а рис. 2 представлена гистограмма углов, формирующих<br />
акустическое поле в отсутствии линз на глубине 1200м и дальности 116км при ∆С ≈ (x,z) = 0,1м/с.<br />
Из представленных результатов следует, что поле на глубине 1200м, точнее в диапазоне глубин от<br />
1150м до 1200м, т.к. интервал усреднения акустического поля по глубине в численном экспер<strong>им</strong>енте был<br />
выбран 50м (∆z = 50м), формируется трёмя угловыми излучающ<strong>им</strong>и кластерами. Согласно классификации,<br />
предложенной в [2], это: крутой отрицательный излучающий кластер [-4,8 ° ; -3,9 ° ]; приосевой излучающий<br />
кластер [-1,6 ° ; +2,1 ° ] и крутой положительный излучающий кластер [+4,6 ° ; +5,4 ° ].<br />
В работах Гостева В.С., <strong>Н</strong>осова Л.<strong>Н</strong>., Швачко Р.Ф. и д.р. (см. ссылки в [3]) экспер<strong>им</strong>ентально и<br />
теоретически доказано, что наибольшее влияние природная стохастичность гидрофизических параметров<br />
водной среды оказывает на звуковые лучи, вышедшие из источника по полог<strong>им</strong> траекториям, на<strong>им</strong>еньшее<br />
– по крутым, т.е. ВРАП, сформированные приосевыми излучающ<strong>им</strong>и кластерами, более чувствительны к<br />
изменениям параметров подводного волновода (это может быть изменение уровня стохастичности или<br />
появление линз различной природы), чем ВРАП, сформированные крутыми излучающ<strong>им</strong>и кластерами. В<br />
этой связи были проведены численные экспер<strong>им</strong>енты для выбора опт<strong>им</strong>ального углового раскрыва источника,<br />
позволяющего обнаружить наличие линз на трассе распространения зондирующего излучения по<br />
виду изменения вида ВРАП на фиксированной дальности. Угловой излучающий кластер был выбран равным<br />
[-1,6 ° ; +2,1 ° ] (см. рис. 2). <strong>Н</strong>а рис. 3 изображены функции ВРАП на дальности 106км – граница между<br />
3<strong>Н</strong>ЗК и 4ВЗК и 116км – граница между 4ВЗК и 4<strong>Н</strong>ЗК в отсутствии и при наличии линзы на трассе распространения<br />
зондирующего излучения для выбранного излучающего раскрыва источника.<br />
Из представленных результатов следует, что угловой излучающий кластер, выбранный вышеописанным<br />
способом, позволяет обнаружить линзу на трассе распространения зондирующего излучения с<br />
использованием одной вертикальной эквидистантной антенной решетки. <strong>Н</strong>аличие линзы кардинально изменяет<br />
вид функции ВРАП: один ярко выраженный макс<strong>им</strong>ум при отсутствии линзы трансформируется в<br />
два макс<strong>им</strong>ума при её наличии на дальности 116км и в три или четыре макс<strong>им</strong>ума на дальности 106км.<br />
<strong>Н</strong>а рис. 4 приведены завис<strong>им</strong>ости ВРАП на границах между верхн<strong>им</strong>и и нижн<strong>им</strong>и зонами конвергенции:<br />
33км - граница между 1ВЗК ÷ 1<strong>Н</strong>ЗК; 49км − 1<strong>Н</strong>ЗК÷2ВЗК; 60км − 2ВЗК÷2<strong>Н</strong>ЗК; 76км −<br />
276
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
2<strong>Н</strong>ЗК÷3ВЗК; 88км − 3ВЗК ÷ 3<strong>Н</strong>ЗК. При отсутствии линзы для угла раскрыва излучающей системы [-1,6 ° ;<br />
+2,1 ° ] и ∆С ≈ (x,z) = 0,1м/с вид функций ВРАП на дальностях, меньших, чем 116км, всегда <strong>им</strong>еет один макс<strong>им</strong>ум.<br />
Предложенный метод выбора величины углового излучающего кластера по существу является<br />
решением обратной задачи по определению параметров источника излучения (величина излучающего<br />
раскрыва) по некоторым заданным требованиям к ВРАП на заданной глубине и дальности (в нашем случае<br />
− единственный макс<strong>им</strong>ум функции ВРАП на глубине 1200м и дальности 116км).<br />
В заключение отмет<strong>им</strong>, что коэффициенты корреляции между функциями ВРАП для ПВ с линзами<br />
и ВРАП без линз, но для более высоких уровней фоновой стохастичности, по-прежнему<br />
A(n)<br />
0,3<br />
0,25<br />
0,2<br />
0,15<br />
0,1<br />
0,05<br />
0<br />
400 600 800 1000 1200 1400<br />
33км 49км 60км 76км 88км<br />
z, м<br />
Рис. 4. Функции ВРАП на границах зон конвергенции. Раскрыв источника [-1,6 ° ; +2,1 ° ], ∆С ≈ (x,z) = 0,1м/с<br />
остаются достаточно высок<strong>им</strong>и (более 0,9). Однако такие уровни стохастичности маловероятны для реальной<br />
гидролого-акустической обстановки: ∆С ≈ (x,z) = 0,5м/с на дальности 106км соответствует реж<strong>им</strong>у<br />
насыщения, а ∆С ≈ (x,z) = 0,3м/с на дальности 116км соответствует реж<strong>им</strong>у сильных флуктуаций [4].<br />
Работа выполнена при поддержке федеральной целевой программы «<strong>Н</strong>аучные и научнопедагогические<br />
кадры инновационной России», мероприятие 1.2.2 «Проведение научных исследований<br />
научными группами под руководством кандидатов наук» (Гос. контракт №2524 от 20.11.09г.).<br />
Л И Т Е Р А Т У Р А<br />
1. Сальников Б.А., Сальникова Е.<strong>Н</strong>. Обнаружение локальных нарушений поля скорости звука в случайно-анизотропных рефракционных<br />
подводных волноводах // Сб. тр. научн. тех. конф. «Технические проблемы освоения Мирового океана. –<br />
Владивосток: Дальнаука, 2007. – С.336-341.<br />
2. Сальников Б.А., Сальникова Е.<strong>Н</strong>., Стаценко Л.Г., Кулик С.Ю., Миргородская Ю.В. Исследование зональной структуры<br />
акустических полей в многолучевых случайно-неоднородных подводных волноводах // Акустические измерения и стандартизация.<br />
Ультразвук и ультразвуковые технологии. Атмосферная акустика. Акустика океана. Сб. тр. XXII сессии Российского<br />
акустического общества и Сессии <strong>Н</strong>аучного совета РА<strong>Н</strong> по акустике. Т. 2. - М.: ГЕОС, 2010. – С.210-213.<br />
3. Гостев В.С., Швачко Р.Ф. Акустические эффекты в океане с тонкоструктурной стратификацией (натурные экспер<strong>им</strong>енты,<br />
компьютерное моделирование) // Доклады XI научной школы-семинара акад Л.М.Бреховских «Акустика океана», совмещённая<br />
с XVII сессией Российского акустического общества. – М.: ГЕОС, 2006. – С.215-220.<br />
4. Сальников Б.А., Сальникова Е.<strong>Н</strong>. Моделирование и исследование зональной структуры акустических полей в случайнонеоднородных<br />
подводных волноводах // Подводные исследования и робототехника / <strong>Н</strong>аучно-технический журнал ДВО<br />
РА<strong>Н</strong>, Институт проблем морских технологий. Владивосток: Дальнаука, 2008. – С. 47-57.<br />
УДК 534.231<br />
В.А.Щуров<br />
СРАВ<strong>Н</strong>Е<strong>Н</strong>ИЕ ЗАВИХРЕ<strong>Н</strong><strong>Н</strong>ОСТИ ВЕКТОРА АКУСТИЧЕСКОЙ И<strong>Н</strong>ТЕ<strong>Н</strong>СИВ<strong>Н</strong>ОСТИ<br />
В МЕЛКОМ МОРЕ <strong>Н</strong>А ЧАСТОТАХ 23 ГЦ И 110 ГЦ<br />
Учреждение Российской академии наук Тихоокеанский<br />
океанологический <strong>институт</strong> <strong>им</strong>. В. И. Ильичёва ДВО РА<strong>Н</strong><br />
Россия, 690041, Владивосток, ул. Балтийская, 43<br />
Центр акустических подводных исследований Морского<br />
государственного университета <strong>им</strong>. адм. Г. И. <strong>Н</strong>евельского<br />
Россия, 690059 Владивосток, ул. Верхнепортовая, 50а<br />
Тел.:(4232)312-101; E-mail: shchurov@poi.dvo.ru<br />
Сравниваются вихревые свойства интенсивности на частотах 23 Гц и 110 Гц для реального волновода мелкого моря. Исследования<br />
проводились в заливе Петра Великого Японского моря с помощью одиночного комбинированного приемника.<br />
Вычислялись следующие величины: акустическое давление, реальные и мн<strong>им</strong>ые части ортогональных компонент интенсив-<br />
277
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
ности, разности фаз между компонентами вектора колебательной скорости, ротор вектора интенсивности. Как показали<br />
многочисленные экспер<strong>им</strong>енты, вихревая структура существует во всей исследуемой полосе частот 23–800 Гц и на<br />
различных дистанциях. Показано, что статистические характеристики ротора вектора акустической интенсивности на<br />
частотах 23 Гц и 110 Гц различны.<br />
Проведено исследование векторных характеристик акустического поля тонального сигнала на частотах<br />
23 Гц и 110Гц в мелком море. Глубина места – 120 м. Комбинированный приемник располагался на<br />
глубине 50 м от дна. Оси х и у комбинированного приемника лежат в горизонтальной плоскости. Ось z<br />
направлена вертикально от поверхности к дну. Скорость звука у поверхности больше скорости звука у<br />
Рис.1. Завис<strong>им</strong>ость от времени (расстояния): А – S ( f , t)<br />
P<br />
2 1 – спектральная плотность акустического давления;<br />
В – Re SPV ( f , t)<br />
z 1 – спектральная плотность z-компоненты акустической интенсивности; f 1 = 110 Гц, полоса<br />
анализа – 2 Гц, время усреднения – 3 с. С – S ( f , t)<br />
P<br />
2 2 – спектральная плотность акустического давления; D –<br />
Re SPV ( f , t)<br />
z 2 – спектральная плотность z-компоненты акустической интенсивности; f 2 = 23 Гц, полоса анализа<br />
– 1 Гц, время усреднения – 5 с<br />
дна. Скорость приводного ветра 5-7 м/с. <strong>Н</strong>аблюдалось развитое ветровое волнение. В работах [1-3] описаны<br />
исследования вихрей на частотах 90 Гц, 100 Гц, 110 Гц. Показано, что вихревые структуры на данных<br />
частотах одинаковы. Это и следовало ожидать, т.к. их длины волн близки по величине (~ 14-17 м). Длина<br />
волны на частоте 23 Гц составляет λ~65,2 м, т.е. расстояние, на котором находится комбинированный<br />
приемник от дна, меньше длины волны.<br />
<strong>Н</strong>а рис. 1 представлены проходные характеристики для двух частот f 1 = 110 Гц и f 2 = 23 Гц. Время<br />
t = 2000 c соответствует расстоянию до источника ~ 1400 м; t = 5000 c – расстоянию ~ 6000 м. Завис<strong>им</strong>ость<br />
акустического давления S ( f , , t)<br />
P<br />
2 1 2 от расстояния является характерной для мелкого моря, но z-<br />
компоненты реальной части вектора плотности потока энергии Re S PV ( f , , t)<br />
z 1 2 для двух данных частот<br />
различны (рис. 1B, D). Из рис. 1 следует, что характерные особенности для двух частот сохраняются на<br />
значительном отрезке расстояний.<br />
<strong>Н</strong>а рис. 2A, B, D, E представлены спектральная плотность акустического давления S ( f , , t)<br />
P<br />
2 1 2 и z-<br />
компонента реальной части спектральной плотности потока энергии Re SPV ( f , , t)<br />
z 1 2 более коротких временных<br />
интервалов 2000−2650 с и 2200−2600 с, соответственно. <strong>Н</strong>а рис. 2С, F приведены для этих же интервалов<br />
времени полярные углы θ. Полярный угол θ образован между направлениями оси z и вектором<br />
интенсивности I r<br />
{ SPV<br />
, S , , }<br />
x PV S<br />
y PV . Из рис. 2A, D следует, что акустическое давление флуктуирует в<br />
z<br />
результате вза<strong>им</strong>одействия отдельных мод (лучей). «Провалы» в интерференционных мин<strong>им</strong>умах дости-<br />
278
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
гают -15 дБ. Поведение реальных частей z-компоненты интенсивности на частотах f 1 = 110 Гц и f 2 = 23 Гц<br />
различно. <strong>Н</strong>а частоте f 1 = 110 Гц относительным мин<strong>им</strong>умам S ( f , t)<br />
P<br />
2 1 соответствует смена знака<br />
Re SPV ( f , t)<br />
z 1 на ±180°. Это приводит к тому, что в волноводе мелкого моря происходит чередование<br />
противопотоков энергии. Поток идущий вниз (его величина отмечена «+дБ») сменяется потоком энергии<br />
идущ<strong>им</strong> вверх (знак «-дБ»). Полярный угол (рис. 2С) также указывает на смену направления движения<br />
энергии в вертикальной плоскости. Угол θ = 90 0 соответствует горизонтальному направлению вектора<br />
r<br />
I ( f0<br />
, t)<br />
. Полярный угол θ относительно горизонта меняется в пределах ±30 0 , что полностью соответствует<br />
рис. 2В. Однако Re SPV ( f , t)<br />
z 2 на частоте f 2 = 23 Гц <strong>им</strong>еет другую завис<strong>им</strong>ость от времени (рис. 2Е) –<br />
поток энергии направлен (за исключением точек а, b, с) от поверхности к дну. Большую часть времени<br />
полярный угол θ ≤ 90 0 . В точках a, b, c на сравнительно коротком интервале времени θ относительно горизонта<br />
в точках а, b, с достигает значений: а - θ = +60 0 , b - θ =+45 0 , с - θ = +30 0 .<br />
Резкая смена направления переноса энергии в вертикальной плоскости приводит к образованию<br />
вихревых структур в поле вектора интенсивности. Степень завихренности вычисляется согласно формуле<br />
[3]:<br />
r<br />
*<br />
r r<br />
rot( pV ) = −2ωρ0[ReV<br />
× ImV<br />
] =<br />
r<br />
r<br />
r<br />
− 2ωρ0[ VyVz<br />
sin( ϕ y −ϕz<br />
) i + VxVz<br />
sin( ϕx<br />
−ϕz<br />
) j + VyVx<br />
sin( ϕ y −ϕx<br />
) k ] =<br />
(1)<br />
r<br />
( pV<br />
*<br />
r<br />
pV<br />
*<br />
r<br />
= −2ωρ<br />
rot<br />
pV<br />
*<br />
0 x + rot y + rot z ) ,<br />
r<br />
где p(t) – акустическое давление; V ∗ (t)<br />
– комплексно-сопряженное значение вектора колебательной скорости;<br />
ω - круговая частота; ρ 0 – невозмущенное значение плотности среды; V i – амплитуда колебательной<br />
скорости (i=x,y,z); ( ϕ y − ϕ z ), ( ϕ x − ϕ z ), ( ϕ y − ϕ x ) – разности фаз между компонентами колебательной<br />
скорости.<br />
Рис.2. Завис<strong>им</strong>ости от времени (расстояния): А, В, С - S<br />
P<br />
2 , Re S PVz , θ для частоты f 1 = 110 Гц;<br />
D, E, F – для частоты f 2 = 23 Гц<br />
279
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Выражение (1) в среднем справедливо и для стационарного тонального сигнала. Разности фаз<br />
( ϕ y − ϕz<br />
), ( ϕx<br />
− ϕz<br />
), ( ϕ y − ϕx<br />
) вычисляется из вза<strong>им</strong>ных спектров компонент колебательной скорости<br />
S V ( f , , t)<br />
y V z 1 2 , SV ( f , , t)<br />
xV z 1 2 , SV ( f , , t)<br />
yV x 1 2 . Для частоты f 1 = 110 Гц, полоса анализа равна ∆f=2 Гц, время<br />
усреднения – 3 с. Для частоты f 2 = 23 Гц, полоса анализа равна ∆f=1 Гц, время усреднения – 5 с. Далее<br />
вычислялись нормированные компоненты ротора вектора интенсивности rotxI r ( f1,2<br />
), rotyI r ( f1,2<br />
) ,<br />
rotzI r ( f1,2 ) и строились их гистограммы распределения вероятности. Время накопления гистограмм –<br />
400 с для f 1 = 110 Гц и 650 с для f 2 = 23 Гц.<br />
Рис.3. Гистограммы распределения плотности вероятности нормированных компонент ротора вектора интенсивности.<br />
Левый столбец – f 1 = 110 Гц, правый столбец – f 2 = 23 Гц. A, D – z-компоненты;<br />
В, Е – x-компоненты, C, F – y-компоненты.<br />
<strong>Н</strong>а рис. 3 представлены гистограммы плотности вероятности нормированных компонент ротора<br />
вектора интенсивности. Гистограмма на рис. 3A построена для z-компоненты ротора вектора интенсивности<br />
rot z I r ( f 1 ) .<br />
Поскольку значение rot z I ( f 1 ) = 0 наиболее вероятно, можно утверждать, что завихренность вектора<br />
интенсивности в горизонтальной плоскости хоу отсутствует. Завихренность в вертикальной плоскости<br />
xoz и yoz отлична от нуля, что следует из рис. 3B, C. Так<strong>им</strong> образом, линии тока, по которым движется<br />
акустическая энергия в вихре, лежат в вертикальной плоскости, проходящей через источник звука и приемник.<br />
Из гистограмм рис. 3В, С следует, что плотность вероятности для значений rot x I r<br />
( f 1 ) = ±1 и<br />
rot y I r<br />
( f 1 ) = ±1 отлична от нуля. Величина ±1 указывает на существование вихрей противоположной направленности,<br />
причем, как правило, соседние вихри обладают противоположной направленностью.<br />
Гистограммы для частоты 23 Гц <strong>им</strong>еют аналогичный вид, но <strong>им</strong>еют и особенности. <strong>Н</strong>аиболее вероятные<br />
значения rot z I r<br />
( f 2 ) также как и для f 1 находятся вблизи нуля, однако плотности вероятности x- и<br />
280
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
y-компоненты отличны от нуля для rot x I ( f 2 ) = -1 и rot y I ( f 2 ) = -1, что указывает на существование только<br />
вихрей отрицательной направленности.<br />
Интерпретация полученных результатов сводится к следующему: 1 – характер переноса энергии в мелком<br />
море зависит от длины волн звука (λ 110 ~14 м, λ 23 ~65м); 2 – для f 1 = 110 Гц волновод определяется глубиной<br />
места и рефрагированные у поверхности и затем отраженные от дна лучи создают интерференционное<br />
поле противоположных потоков энергии, что приводит к образованию завихренности ±1; 3 – для частоты<br />
f 2 = 23 Гц волновод не определяется реальным дном; лучи не испытывают отражение от дна, проникают в<br />
грунт и затем возвращаются в волновод в виде каустики (рис. 2F, точки a, b, c).<br />
Данные исследования демонстрируют исключительные возможности векторной акустики в исследовании<br />
сложных акустических полей.<br />
Исследования проведены при поддержке российско-китайского гранта РФФИ №08-05-92210-<br />
ГФЕ<strong>Н</strong>_а<br />
Л И Т Е Р А Т У Р А<br />
1. Щуров В.А., Кулешов В.П., Ткаченко Е.С. Фазовые спектры интерференции широкополосного поверхностного источника<br />
в мелком море// Сборник трудов XXII сессии Российского акустического общества и Сессии <strong>Н</strong>аучного совета РА<strong>Н</strong><br />
по акустике. Т.2, -М.: ГЕОС, 2010. С.248-251.<br />
2. Щуров В.А., Кулешов В.П., Ткаченко Е.С. Вихри акустической интенсивности в мелком море. Электронный журнал<br />
"Техническая акустика", http://ejta.org, 2010, 12.<br />
3. Щуров В.А., Кулешов В.П., Ткаченко Е.С., Черкасов А.В. Вихревой перенос акустической энергии в мелком море// Акустика<br />
океана: докл. ХIII шк.-сем. <strong>им</strong>. акад. Л.М. Бреховских, совмещ. с ХXШ сессией РАО, Москва, 2011, (в печати)<br />
УДК 534.222:629.127.4<br />
М.В. Мироненко, А.Е. Малашенко, Л.Э. Карачун, А.М. Василенко<br />
ДАЛЬ<strong>Н</strong>ИЙ ПАРАМЕТРИЧЕСКИЙ ПРИЕМ ВОЛ<strong>Н</strong> РАЗЛИЧ<strong>Н</strong>ОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ<br />
В МОРСКОЙ СРЕДЕ<br />
Специальное конструкторское бюро средств автоматизации<br />
морских исследований ДВО РА<strong>Н</strong>, Россия, 693023 г. Южно-Сахалинск, ул. Горького, 25<br />
Тел.: (4232) 276710; E-mail: professor@mail.primorye.ru<br />
Рассматриваются закономерности просветного метода гидролокации, как параметрического с низкочастотной накачкой<br />
морской среды, обеспечивающего комплексный мониторинг акустических, электромагнитных и гидродинамических полей<br />
звукового, инфразвукового, дробного диапазонов частот, формируемых естественными и искусственными источниками.<br />
Приводятся результаты практических измерений волн исследуемых полей на протяженных морских акваториях.<br />
Физико-математическая сущность дальнего параметрического приема гидрофизических волн в морской<br />
среде может быть изложена на основе следующих закономерностей. Параметры гидрофизических<br />
полей нелинейной морской среды, в которой распространяется гидроакустическая волна, изменяют (модулируют)<br />
ее характеристики. Известно, что влияние гидрофизических полей источников излучения на<br />
просветные осуществляется через изменение плотности и коэффициента упругости морской среды. Реализация<br />
этой закономерности предусматривает специальное изменение (увеличение или уменьшение) плотности<br />
и температуры водной среды, формирование этих величин в дальней зоне излучателя или на протяженном<br />
пути распространения сигналов в морской среде. Изменение этих параметров в сторону увеличения<br />
можно производить различными способами, но основным из них является формирование в заданном<br />
направлении излучения-приема волн протяженной нелинейной области. Для биологических скоплений<br />
– это пузырьковая область организмов, напр<strong>им</strong>ер рыб, для морских судов – это пузырьковый кильватерный<br />
след. Такие изменения могут быть внесены также друг<strong>им</strong>и специальными способами и реализующ<strong>им</strong>и<br />
их средствами.<br />
Основной вклад в эффективность преобразования высокочастотного сигнала в низкочастотные гармоники<br />
вносят так называемые нелинейные параметры среды Е, которые, как правило, невелики. Для дистиллированной<br />
воды E = 3,1 при температуре 10 o C; 3,5 - при 20 o C; 3,7 - при 40 o C. Для морской воды при<br />
средней солености и изменений температур в пределах 20-30 o C величина E составляет порядка 3,6. Последн<strong>им</strong>и<br />
экспер<strong>им</strong>ентальными работами в открытом море показано, что коэффициент нелинейности E в<br />
широком диапазоне частот и на глубинах до 300 м изменяется незначительно и не превышает 4 [1,2]. Поэтому<br />
принципиально новых эффектов по сравнению с уже известными в открытом океане на произвольных<br />
глубинах ожидать невозможно. Так<strong>им</strong> образом, дальнейшее повышение эффективности работы гидроакустических<br />
приборов за счет совершенствования работы излучателей, как параметрических (в том<br />
числе путем наращивания мощности излучаемого сигнала), проблематично. В этом случае необход<strong>им</strong>о<br />
пр<strong>им</strong>енять иные способы и реализующие их средства, напр<strong>им</strong>ер, за счет увеличения объема среды нелинейного<br />
вза<strong>им</strong>одействия волн, что является предметом исследований настоящей работы [3-5].<br />
281
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Закономерности параметрического формирования электромагнитных колебаний в проводящей морской<br />
среде и их использование, как модуляционных признаков просветных акустических волн, заключаются<br />
в следующем. При излучении электромагнитной волны в морскую электропроводящую среду, происходит<br />
ее поглощение и затухание. Одновременно значительно уменьшается ее длина. В завис<strong>им</strong>ости от<br />
провод<strong>им</strong>ости морской среды расстояние, на котором затухает электромагнитная волна низких и инфранизких<br />
частот (от единиц Гц до сотен Гц), может составлять от 10-20 метров до 100-200 метров. При этом<br />
«длина» затухающей электромагнитной волны может составлять от 0,1-0,2 до 10-20 метров. Математически<br />
процесс распространения электромагнитной волны описывается известным уравнением диффузии,<br />
которое выводится на основе теории вза<strong>им</strong>одействия электромагнитной волны в проводящей жидкости,<br />
приблизительно описывающей морскую среду. Теоретическая основа и практические пути реализации<br />
рассматриваемой закономерности заключается в том, что электрические токи, генерируемые электромагнитной<br />
волной, переходят в джоулево тепло. Диссипативные потери на ток провод<strong>им</strong>ости в морской среде<br />
преобразовываются в тепловые потери, которые, в свою очередь, изменяют механистические характеристики<br />
проводящей жидкости (плотность, температуру, теплоемкость и т. д.). При пропускании по такой<br />
промодулированной в пространстве упругой нелинейной среде акустической волны накачки ее параметры<br />
будут промодулированы за счет изменения фазовой скорости волны по трассе распространения. Спектр<br />
упругой (акустической) волны накачки изменяется, в нем появляются высокочастотные и низкочастотные<br />
параметрические составляющие (за счет нелинейного вза<strong>им</strong>одействия). Параметрический прием информационных<br />
волн в рассматриваемой системе проявляется как амплитудно-фазовая модуляция акустической<br />
волны накачки, которая распространяется вместе с ней в точку приема и выделяется в тракте обработки<br />
сигналов [1-4].<br />
Процесс формирования и параметрического приема волн пространственной параметрической антенной,<br />
как просветной гидроакустической линией, можно пояснить системой уравнений гидродинамики<br />
для вязкой жидкости при наложении на уравнение состояния соответствующих изменений фазовой скорости<br />
звука во времени и пространстве. Для вычисления скорости распространения упругой (акустической)<br />
волны можно пр<strong>им</strong>енить известную формулу [1-4]<br />
Ñ = P β , (1),<br />
( t)<br />
1/<br />
o s(<br />
t)<br />
где β<br />
s<br />
= − 1/<br />
υ ( ∂υ<br />
∂Ð ) s<br />
- коэффициент адиабатической сж<strong>им</strong>аемости жидкости; υ - удельный объем.<br />
Воспользовавшись соотношением между адиабатической и изотермической сж<strong>им</strong>аемостью<br />
β = Gυ<br />
/ β можно получить выражение для фазовой скорости<br />
s<br />
G p<br />
t<br />
C = ) . (2)<br />
( t)<br />
( C<br />
p<br />
/ Cυ<br />
)( ∂P<br />
/ ∂ρ<br />
t<br />
Очевидно, что качественно любые изменения плотности ρ , давления P при постоянной температуре<br />
приводят к изменению фазовой скорости звука во времени в зоне вза<strong>им</strong>одействия электромагнитной<br />
волны с упругой через проводящую электрический ток морскую среду. То есть, в отличие от классических<br />
уравнений гидродинамики для идеальной жидкости, которые используются в теории нелинейных параметрических<br />
излучателей, в последних уравнениях фазовая скорость упругой волны изменяется во времени<br />
и пространстве по закону изменения электромагнитной волны. Так<strong>им</strong> образом, если в рабочей зоне<br />
просветной параметрической системы распространяется электромагнитная волна гармонической частоты<br />
Рис. 1. Спектрограмма шумоизлучения морского судна. Параметрические измерения<br />
на трассе 345 км, подсветка-400Гц<br />
282
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Ω<br />
ýì<br />
çâ<br />
, то фазовая скорость упругой (просветной акустической) волны C (t) также будет изменяться с той же<br />
частотой Ω = Ω эм . Закономерности нелинейного вза<strong>им</strong>одействия для других волн, как и в случае положительного<br />
эффекта с электромагнитными, также должны реально существовать, т.е. в зоне приема упругих волн<br />
будет формироваться спектр дополнительных волн (составляющих суммарной и разностной частоты и их гармоник).<br />
Реализация закономерностей нелинейного вза<strong>им</strong>одействия волн различной физической природы в<br />
низкочастотном методе гидролокации обоснована теоретически и подтверждена морск<strong>им</strong>и экспер<strong>им</strong>ентальными<br />
исследованиями [1-5]. Основными положениями закономерностей нелинейного вза<strong>им</strong>одействия<br />
и параметрического преобразования просветных волн с измеряемыми информационными являются:<br />
− амплитудно-фазовая модуляция просветных сигналов излучаемыми полями и гидродинамическ<strong>им</strong>и<br />
областями движущихся объектов или неоднородностей среды;<br />
− параметрическое преобразование просветных сигналов акустическ<strong>им</strong>и и электромагнитными полями<br />
морских объектов.<br />
Рис. 2. Спектрограмма шумоизлучения морского судна. Параметрические<br />
измерения на трассе 30 км, подсветка-381 Гц.<br />
Сущность параметрического преобразования просветных и объектных волн заключается в следующем. В<br />
отличие от классических параметрических устройств излучения и приема сигналов просветная система<br />
контроля морских акваторий, основанная на реализации закономерностей нелинейной акустики, представляет<br />
собой многоканальную широкомасштабную параметрическую систему с низкочастотной подсветкой<br />
(накачкой) среды. Параметрическое вза<strong>им</strong>одействие просветных сигналов близкой частоты, а<br />
также преобразование их полями объектов или излучениями специальных источников происходит на всем<br />
пути совместного распространения в водной среде. <strong>Н</strong>аиболее эффективное параметрическое вза<strong>им</strong>одействие<br />
осуществляется в сопутствующей движущ<strong>им</strong>ся объектам нелинейной области, которая <strong>им</strong>еет протяженные<br />
пространственные объемы.<br />
Рис. 3. Спектр электромагнитного излучения морского судна. Параметрические<br />
измерения на трассе 45 км, подсветка-380 Гц<br />
283
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Для подтверждения закономерностей нелинейного вза<strong>им</strong>одействия волн различной физической<br />
природы в морской среде были проведены натурные испытания на стационарных гидроакустических<br />
трассах протяженностью десятки-сотни километров. Просветные гидроакустические сигналы стабилизированной<br />
частоты около 400 Гц излучались подводным резонансным излучателем. В качестве приемной<br />
системы использовалась протяженная донная база (антенна) с ненаправленным приемом. Излучающая и<br />
приемная базы посредством глубоководных кабелей соединялись с береговыми лабораториями. В качестве<br />
источника электромагнитных и гидродинамических волн использовалось электромагнитное поле судна<br />
на частоте его электропитания 400 Гц. Судно, маневрируя, многократно пересекало контролируемую линию<br />
и модулировало акустические сигналы подсветки среды. Результаты экспер<strong>им</strong>ентальных исследований<br />
представлены на рис. 1-4.<br />
Рис. 4. Спектрограмма шумоизлучения морского судна. Параметрические<br />
измерения на – 45 км, подсветка – 380 Гц.<br />
Морск<strong>им</strong>и экспер<strong>им</strong>ентальными исследованиями просветного метода гидролокации реализованы<br />
практические пути построения и эксплуатации широкомасштабной параметрической системы контроля и<br />
комплексного мониторинга гидрофизических полей различной физической природы в звуковом, инфразвуковом<br />
и дробном диапазонах частот на морских акваториях протяженностью десятки-сотни километров.<br />
Протяженность рассматриваемой системы (большой масштаб дальности параметрического приема<br />
волн) обеспечивается прозвучиванием (накачкой) среды слабозатухающ<strong>им</strong>и низкочастотными акустическ<strong>им</strong>и<br />
сигналами в диапазоне десятки-сотни Герц, что реализуется существующ<strong>им</strong>и радиогидроакустическ<strong>им</strong>и<br />
средствами. Повышенный эффект нелинейного вза<strong>им</strong>одействия и параметрического преобразования<br />
волн достигается за счет использования соизмер<strong>им</strong>ой с протяженностью контролируемого участка<br />
морской среды пространственной рабочей зоны вза<strong>им</strong>одействия волн, что обеспечивает также решение<br />
известной проблемы дальнего параметрического приема «волн малых амплитуд». В известных параметрических<br />
системах дальность параметрического приема волн составляет сотни метров – единицыкилометров<br />
[1,6]. Очевидно, что и другие инфранизкочастотные акустические, электромагнитные и гидродинамические<br />
волны различной физической природы, сформированные специальными морск<strong>им</strong>и источниками<br />
или стихийными явлениями (напр<strong>им</strong>ер, внутренн<strong>им</strong>и волнами, землетрясениями или цунами) будут надежно<br />
и своевременно зарегистрированы.<br />
Итак, с использованием просветного метода гидролокации решена задача дальнего параметрического<br />
приема и измерения характеристик информационных волн различной физической природы (акустических,<br />
электромагнитных и гидродинамических) низкочастотного, инфранизкочастотного и дробного диапазонов.<br />
Дальность параметрического приема волн и протяженность просветных систем контроля среды<br />
может составлять десятки-сотни километров.<br />
Л И Т Е Р А Т У Р А<br />
1. <strong>Н</strong>овиков Б.К., Руденко О.В., Т<strong>им</strong>ошенко В.И. // <strong>Н</strong>елинейная гидроакустика. Л.: Судостроение, 1981.<br />
2. Короченцев В.И., Мироненко М.В. и др. Способ параметрического приема упругой волны в морской воде // Патент RU<br />
2158029 от 15.12.1998.<br />
3. Мироненко М.В. Физико-математические основы нетрадиционного метода «гидролокации на просвет» // Сб. статей Всероссийской<br />
межвузовской <strong>Н</strong>ТК. Владивосток, ТОВВМУ.– Вып.3.–1996.– С. 88-91.<br />
284
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
4. Мироненко М.В., Малашенко А.Е., Табояков А.А., Карачун Л.Э., ВасиленкоА.М., Леоненков Р.В. <strong>Н</strong>изкочастотный просветный<br />
метод дальней гидролокации гидрофизических полей морской среды // Монография, СКБ САМИ ДВО РА<strong>Н</strong>. Владивосток.–<br />
2006.– 173с.<br />
5. Мироненко М.В., Мироненко А.М. Метод дальнего параметрического приема акустических волн низкочастотного и инфранизкочаст.<br />
диапазонов // Сб. тр. 11 сес. РАО.- Т. 2. М.:-ГЕОС, 2001.- С. 222–225.<br />
6. Зверев В.А., Калачев А.И. Устройство параметрического приема в морской среде инфразвуковых колебаний // Патент №<br />
422197 (СССР). –1982.<br />
УДК 534.222:629.127<br />
М.В. Мироненко, Л.Э. Карачун, А.Е. Малашенко, П.А. Стародубцев<br />
ПРАКТИЧЕСКИЕ ПУТИ ПОСТРОЕ<strong>Н</strong>ИЯ И ЭКСПЛУАТАЦИИ ШИРОКОМАСШТАБ<strong>Н</strong>ЫХ<br />
ТОМОГРАФИЧЕСКИХ СИСТЕМ МО<strong>Н</strong>ИТОРИ<strong>Н</strong>ГА ГИДРОФИЗИЧЕСКИХ ПОЛЕЙ<br />
МОРСКИХ АКВАТОРИЙ<br />
Специальное конструкторское бюро средств автоматизации<br />
морских исследований ДВО РА<strong>Н</strong>, Россия, 693013 г. Южно-Сахалинск, ул. Горького, 25<br />
Тел.: (4232) 276710; E-mail: professor@mail.primorye.ru<br />
Рассматриваются научно-технические основы формирования широкомасштабных радиогидроакустических систем томографического<br />
мониторинга пространственной амплитудно-фазовой структуры гидрофизических полей морской среды<br />
различной физической природы. Показано, что рассматриваемая система может быть сформирована на основе научных<br />
разработок обобщенного низкочастотного (активно-пассивного и параметрического) просветного метода дальней гидролокации<br />
и технических средств морского приборостроения ДВО РА<strong>Н</strong>. Приводится результат практической реализации<br />
просветной радиогидроакустической системы в решении задач томографического мониторинга морских акваторий.<br />
Решение научно-технической проблемы создания и пр<strong>им</strong>енения широкомасштабной системы томографического<br />
наблюдения и мониторинга гидрофизических полей среды и объектов на морских акваториях<br />
могут быть выполнены на основе разработок обобщенного активно-пассивного и параметрического<br />
(просветного) метода гидролокации и реализации его с использованием радиогидроакустических средств<br />
морского приборостроения. В этой связи следует напомнить, что научной составляющей решаемой проблемы<br />
являются разработки низкочастотного просветного метода, обеспечивающего дальнее наблюдение<br />
совокупности гидрофизических полей морской среды и объектов различной физической природы. Техническая<br />
составляющая проблемы включает разработки и конструкторские решения СКБ САМИ ДВО РА<strong>Н</strong><br />
по созданию радиогидроакустических средств морского приборостроения и автономных измерительных<br />
модулей, обеспечивающих длительное получение информации о гидрофизических полях среды и передачи<br />
ее в Единый центр анализа и управления [1-10].<br />
<strong>Н</strong>аучно-технические разработки метода гидролокации на просвет (МГЛнП) являются основой для разработки<br />
различных гидроакустических средств, в том числе и наиболее перспективных – широкомасштабных<br />
томографических систем мониторинга и охраны морских акваторий. При этом томографическая<br />
система представляет собой многоэлементные излучающие и приемные антенны. Трактами обработки<br />
информации, в отличие от классических томографических систем, формируется не геометрический образ<br />
объектов, а пространственная картина спектральных характеристик полей объектов и среды различной<br />
физической природы.<br />
Проанализируем закономерности параметрической модели МГЛнП [1-7]. Исходя из этого, в классическом<br />
выражении вза<strong>им</strong>одействия и параметрического преобразования волн следует учитывать: затухание<br />
просветной волны P n , обусловленное ее расхождением при распространении в волноводе, которое обратно<br />
пропорционально квадрату расстояния P n / R ; вза<strong>им</strong>одействие волн не по протяженности совместного<br />
2<br />
пути, а по объему нелинейно-возмущенной среды V; повышенную степень нелинейности среды в объеме<br />
вза<strong>им</strong>одействия, составляющую порядка 10-15 единиц; малое отличие частот просветных волн ω и полезного<br />
сигнала ω<br />
c<br />
, которое в этом случае находится в пределах одного порядка и обеспечивает их более<br />
интенсивное вза<strong>им</strong>одействие. Это позволяет рассматривать МГЛнП как пространственную параметрическую<br />
антенну бегущей волны [4-6,8].<br />
С учетом этих поправок известные аналитические завис<strong>им</strong>ости для амплитуд комбинационных волн и<br />
индекса фазовой модуляции могут быть представлены в следующем виде [6,8,10]:<br />
( γ + 1) ⋅ ω<br />
n<br />
⋅ ω<br />
c<br />
Pn<br />
PcV<br />
Pk<br />
=<br />
;<br />
( γ + 1) ⋅ω<br />
c P c V<br />
4ρ ( c )<br />
3 R 2<br />
∆ ϕ =<br />
, (1)<br />
o<br />
3 2<br />
o<br />
2ρ o ( co)<br />
R<br />
где V – объем среды параметрического вза<strong>им</strong>одействия волн; R – расстояние от точки излучения до точки<br />
расположения объема локации.<br />
285<br />
n
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Характеристика направленности просветной параметрической антенны подобна пространственной антенне<br />
бегущей волны и, в этой связи, обладает высокой направленностью и помехозащищенностью. Она<br />
может быть представлена как<br />
γ − (1 − cosθ<br />
) sin( k R / 2)(1 − cosθ<br />
)<br />
D(<br />
θ ) =<br />
⋅ c<br />
, θ рад ≈ 1.9<br />
λc<br />
/ R<br />
(2)<br />
γ ( kcR<br />
/ 2)(1 − cosθ<br />
)<br />
Ширина характеристики направленности просветной параметрической антенны ограничивается пределами<br />
первых зон Френеля, которые определяются длиной волны просветных сигналов и протяженностью<br />
барьерной линии. Структура просветной параметрической антенны и ее реализация в многолучевом<br />
канале распространения (включая пр<strong>им</strong>енение как бистатической) приведены на рис. 1-3.<br />
Реализация бестелесной параметрической антенны в просветных томографических системах<br />
мониторинга характеристик гидрофизических полей морских акваторий. История и практические<br />
разработки идеи бестелесной акустической антенны бегущей волны, основанной на высокочастотной<br />
накачке нелинейной водной среды, обстоятельно изложены в работах [1-3]. В этом случае<br />
рассматривается развитие этой идеи в низкочастотном просветном методе гидролокации, который<br />
объединяет закономерности преобразования просветного акустического поля излучениями и полями<br />
объектов различной физической природы, а также пространственно развитыми неоднородностями<br />
морской среды. <strong>Н</strong>аиболее эффективно проявляется закономерность амплитудно-фазовой модуляции и<br />
параметрического преобразования просветных сигналов акустическ<strong>им</strong>и и электромагнитными<br />
излучениями объектов при их совместном<br />
распространении в морской среде [4-10]. В<br />
случае расположения объекта или<br />
нелинейной неоднородности среды в<br />
пределах первой зоны будет происходить<br />
интенсивное<br />
параметрическое<br />
преобразование просветных волн. В этом<br />
случае, первая зона выполняет функции<br />
бестелесной пространственной антенны<br />
бегущей волны с низкочастотной накачкой.<br />
Именно этот факт определяет высокий<br />
эффект рассматриваемой параметрической<br />
антенны, который по пр<strong>им</strong>ерным оценкам<br />
значительно превышает ранее привод<strong>им</strong>ые<br />
оценки классических параметрических<br />
приемников.<br />
Томографическая просветная система,<br />
как новое научно-техническое решение<br />
в нелинейной гидроакустике, представляет<br />
собой широкомасштабную приемоизлучающую<br />
параметрическую систему с низкочастотной<br />
накачкой (подсветкой) контролируемой<br />
акватории, обеспечивающая<br />
дальнее измерение характеристик полей<br />
акустически слабозаметных объектов, как<br />
«волн малых амплитуд» [9,10].<br />
Задача определения дистанции и<br />
ориентировочного значения глубины шумящего<br />
объекта решена в известном изобретении<br />
Роберта Дж. Урика под названием<br />
«глубоководная цепочка гидрофонных<br />
блоков» [11]. Она представляет собой цепочку<br />
гидрофонных блоков, каждый из<br />
которых устанавливается на заданной глубине<br />
и контролируется датчиком. Блоки<br />
расположены так, что они прин<strong>им</strong>ают сигналы<br />
от шумящих объектов, охватывая конусом лучи, приходящие сверху и снизу. Принцип действия антенны<br />
по изобретению заключается в следующем. Установленная на якоре вертикальная цепочка направ-<br />
286
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
ленных приёмных гидрофонных блоков обеспечивает полный (по дистанции и глубине) просмотр глубоководной<br />
(до 3000 м) акватории по её внутренн<strong>им</strong> (предельным) лучам скольжения, которые приходят в<br />
точку приёма без отражений от дна и поверхности и обеспечивают за счет этого энергетический выигрыш<br />
от 5 до 20 дБ. Выбор горизонтов в таких комбинированных системах излучения и приёма сигналов должны<br />
обеспечивать единственные для контролируемой акватории условия приходов сигналов по лучам и<br />
охватывать просмотр всей толщи контролируемой среды по трассе. Ожидаемые траектории лучей (приходов<br />
сигналов от объектов) рассчитываются заранее с учётом измеренных параметров гидрологоакустических<br />
характеристик среды. Пр<strong>им</strong>енение в системе контроля дополнительной излучающей цепочки<br />
ненаправленных преобразователей позволяет обеспечивать макс<strong>им</strong>ально возможную засветку контролируемой<br />
среды [5.6.10].<br />
В случае пересечения лучей (траектории сигналов) нелинейными областями объектов происходит<br />
усиление параметрического вза<strong>им</strong>одействия объектных и просветных сигналов, формирование в них параметрических<br />
составляющих, которые накладываются на исходные волны. Спектрограмма шумоизлучения<br />
технического объекта обнаруженного томографической системой представлена на рис.4. Ввиду нетрадиционности<br />
построения рассматриваемой томографической системы измеряется и представляется<br />
также нетрадиционно образ объектов, а <strong>им</strong>енно, измеряются спектральные (или статистические) характеристики<br />
флуктуаций амплитуды и фазы просветных сигналов, обусловленные модуляцией, а также параметрическ<strong>им</strong><br />
преобразованием сигналов движущихся объектов и его полями [7-10]. Пр<strong>им</strong>еры дальнего<br />
параметрического измерения характеристик гидрофизических волн движущихся объектов и специальных<br />
источников излучения морской среды приведены на рис. 4-6.<br />
Рис.4. Спектрограмма шумоизлучения морского судна. Параметрические измерения просветным<br />
методом гидролокации на трассе 45 км. Подсветка среды – 400 Гц.<br />
t, мин<br />
70<br />
60<br />
50<br />
40<br />
30<br />
20<br />
Резонансные излучения<br />
корпуса<br />
Излучения механизмов<br />
10<br />
00<br />
1,25 2,5 5,0 7,5 10,0 F, Гц<br />
Рис. 5. Спектрограмма шумоизлучения морского судна. Параметрические измерения просветным<br />
методом гидролокации на трассе 210 км. Частота подсветки среды – 400 Гц.<br />
Рассмотренная томографическая система контроля морских акваторий представляет собой многоканальную<br />
широкомасштабную систему с низкочастотной подсветкой (накачкой) среды. Приемная часть<br />
287
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
томографической системы контроля среды представляет собой многолучевую параметрическую антенну с<br />
низкочастотной накачкой. Принцип компоновки и функционирования систем основан на использовании<br />
достижений низкочастотного метода гидролокации на просвет, как параметрического с низкочастотной<br />
накачкой контролируемой среды. Важная роль в создании широкомасштабных томографических систем<br />
контроля и мониторинга характеристик среды принадлежит научно-техническ<strong>им</strong> разработкам радиогидроакустических<br />
средств морского приборостроения СКБ САМИ ДВО РА<strong>Н</strong>, с использованием которых<br />
может быть эффективно реализован дальний параметрический прием гидрофизических волн морской среды<br />
в широком диапазоне частот с последующей передачей информации в Единый региональный центр<br />
анализа и управления.<br />
Так<strong>им</strong> образом, практические пути построения широкомасштабной системы мониторинга характеристик<br />
гидрофизических полей среды и источников обоснованы и подтверждены результатами экспер<strong>им</strong>ентальных<br />
исследований на протяженных морских трассах [12,13].<br />
Рис. 6. Спектрограмма электромагнитных излучений морского судна. Параметрические измерения<br />
просветным методом гидролокации на трассе 345 км, подсветка среды – 400 Гц.<br />
Л И Т Е Р А Т У Р А<br />
1. Зверев В.А., Калачев А.И. Модуляция звука звуком при пересечении акустических волн // <strong>Акустический</strong> журнал.–<br />
Т.16.– №2.– 1970.– С.245-251.<br />
2. Донской Д.М., Сутин А.М. Параметрический прием акустических сигналов в неоднородных средах // <strong>Акустический</strong><br />
журнал.– Т.27.– №6. –1981.– С.876-881.<br />
3. Зверев В.А., Калачев А.И. Устройство для приема инфразвуковых колебаний // Ав. свид. (СССР), №422197 //<br />
Бюллетень изобретений.– №8.– 1982.<br />
4. Мироненко М.В., Стародубцев П.А. Мироненко А.М. Метод низкочастотной гидроакустической томографии и<br />
измерительная система контроля морских акваторий // «Акустика океана» Сб. трудов 11 сессии РАО.– Т.2.– М.:<br />
ГЕОС.– 2001. – С.7-10.<br />
5. Стародубцев П.А., Мироненко М.В., Тахтеев В.А., Стародубцев Е.П., Шевченко Е.В. Теоретические основы формирования<br />
просветных систем и перспективы развития морского приборостроения на Дальнем Востоке // Монография.–<br />
Владивосток.– МГУ.– 2006.– 178 с.<br />
6. Стародубцев П.А., Мироненко М.В. Стационарная томографическая система мониторинга характеристик морских<br />
акваторий // Сб. трудов Регионал. конференции. Владивосток. ДВГМА. – Ч.3.– 1998. – С.115.<br />
7. Мироненко М.В., Мироненко А.М. Метод дальнего параметрического приема акустических волн низкочастотного<br />
и инфранизкочаст. диапазонов // Сб. тр 11 сес. РАО.–Т. 2, М.: ГЕОС.– 2001.– С. 222–225.<br />
8. Зверев В.А. Как зарождалась идея акустической параметрической антенны // <strong>Акустический</strong> журнал.– Т.45.– № 5.–<br />
1999.– С. 685-692.<br />
9. Шостак С.В., Мироненко М.В. Амплитудно-фазовая модуляция акустических волн при их вза<strong>им</strong>одействии в<br />
морской среде // Сб. статей ТОВМИ <strong>им</strong>.С.О.Макарова. Владивосток.– Вып.22.– 2001. – С. 82−88.<br />
288
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
10. Мироненко М.В., Малашенко А.Е., Табояков А.А., Карачун Л.Э., ВасиленкоА.М. <strong>Н</strong>изкочастотный просветный метод<br />
дальней гидролокации гидрофизических полей морской среды // Монография. Владивосток.– СКБ САМИ<br />
ДВО РА<strong>Н</strong>. –2006.– 173с.<br />
11. Роберт Дж. Урик. Глубоководная цепочка гидрофонов // Патент США № 3982222.–1975.<br />
12. Мироненко М.В., Карачун Л.Э., Малашенко А.Е. Глубоководный автономный радиогидроакустический комплекс<br />
измерения гидрофизических полей морской среды, передачи информации по каналам связи // Сб. Статей «Морские<br />
исследования и технологии изучения природы Мирового океана».–Владивосток. –СКБ САМИ ДВО РА<strong>Н</strong>.–<br />
Вып. 1.– 2005.– С.125-128.<br />
13. Мироненко М.В., Карачун Л.Э., Табояков А.А., Корытко А.С. Радиогидроакустическая система мониторинга<br />
сейсмической и синоптической обстановки // 8 Междунар. конфер. «Прикладные технологии гидроакустики и<br />
гидрофизики». К столетию флота России.– С-Петербург.– 2006.– С.324-328.<br />
УДК 534.6.084<br />
С.А.Бахарев, Л.М.Клячко, А.В.Рогожников, В.В.Сухомесова<br />
ГИДРОАКУСТИЧЕСКИЙ СТЕ<strong>Н</strong>Д <strong>Н</strong>А БАЗЕ ТЕЛЕУПРАВЛЯЕМОГО ПОДВОД<strong>Н</strong>ОГО<br />
АППАРАТА И<strong>Н</strong>СПЕКЦИО<strong>Н</strong><strong>Н</strong>ОГО КЛАССА<br />
ОАО «Ц<strong>Н</strong>ИИ «Курс»<br />
Россия, 105187 Москва, ул. Кирпичная, д.34а<br />
Тел.: (495) 365-1153; Факс: (495) 365-4314; E-mail: grsud@kyrs.ru<br />
При отсутствии глубоководных гидроакустических измерительных полигонов и специализированных судов глубоководный<br />
гидроакустический измерительный стенд (ГГИС) необход<strong>им</strong> не только в интересах изучения процессов распространения,<br />
рассеяния и поглощения акустической энергии, но и для гидроакустической калибровки конкретного гидрографического<br />
района, гидроакустического средства, а также измерений гидроакустических полей кораблей, в том числе подводных. Для<br />
проведения калибровки излучающих антенн гидролокаторов, обладающих высок<strong>им</strong> энергетическ<strong>им</strong> потенциалом, с достаточной<br />
для практики точностью выбор расстояния, на которое удален измерительный гидрофон, производится с учетом<br />
эффектов, возникающих в реальной морской среде при распространении акустических волн конечной амплитуды. Измерения<br />
последовательно осуществляются на различных расстояниях, как в горизонтальной, так и в вертикальной плоскости.<br />
Для проведения гидроакустических измерений, особенно в инфразвуковом и низком звуковом – ниже 400 Гц – диапазонах<br />
частот, для испытания различных подводных узлов и др., предлагается использовать ГГИС на базе малогабаритного телеуправляемого<br />
необитаемого подводного аппарата инспекционного класса модульной конструкции, массой до 150 кг, с<br />
полезной нагрузкой до 35 кг, оснащенного системой аварийного всплытия, инерциальной и гидроакустической навигации, с<br />
набором средств подводного поиска и осмотра подводных объектов, измерительными гидрофонами и калиброванными<br />
излучателями на борту.<br />
Вн<strong>им</strong>ание дальновидных политиков и ученых в настоящее время направлено к Мировому океану с<br />
его огромным минерально-сырьевым потенциалом. Безусловно, «вход в океан» представляется делом трудоемк<strong>им</strong><br />
и технически сложным, и в этой связи особую актуальность приобретает развитие работ в области<br />
специального судостроения, включая робототехнические системы (РТС), а также в области прикладной<br />
акустики и, в частности, нелинейной гидроакустики [1 – 8].<br />
Можно с ностальгией вспомнить отечественные глубоководные гидроакустические измерительные<br />
полигоны ВМФ (напр<strong>им</strong>ер, в б. Влад<strong>им</strong>ир, Пр<strong>им</strong>орский край и др.), предназначенные для контроля<br />
первичных акустических полей подводных лодок (ПЛ), но их история закончилась с развалом подводного<br />
флота СССР. К тому же в условиях глобального финансово-экономического кризиса и существенного сокращения<br />
численности ПЛ ВМФ, их целесообразность для современной России далеко не очевидна. Можно<br />
также с завистью смотреть на зарубежные суда контроля физических полей, которые широко используются<br />
не только в интересах военно-морских сил, но и для решения целого спектра народнохозяйственных<br />
задач. Однако можно пойти и собственным, в некоторой степени креативным, путем и добиться<br />
более высокого качества гидроакустических измерений при существенно (на несколько порядков)<br />
меньших финансовых затратах.<br />
В данной работе для проведения гидроакустических измерений предлагается использовать глубоководный<br />
гидроакустический измерительный стенд (ГГИС) на базе малогабаритного телеуправляемого<br />
необитаемого подводного аппарата (Т<strong>Н</strong>ПА) инспекционного класса. Данный класс Т<strong>Н</strong>ПА (легкие осмотровые<br />
аппараты с «сух<strong>им</strong>» весом от 30 до 350 кг) представлен на рынке наибольш<strong>им</strong> разнообразием технических<br />
решений, всегда являющихся компромиссным вариантом соотношения массогабаритных показателей<br />
и функциональных возможностей для решения конкретных практических задач. В случае ГГИС<br />
так<strong>им</strong>и задачами являются:<br />
– контроль первичного и вторичного акустических, а также электромагнитного полей ПЛ и кораблей<br />
ВМФ, научно-исследовательских судов (геофизических – используемых при поиске углеводородов с пр<strong>им</strong>енением<br />
методов сейсморазведки, рыболовных – используемых для оценки запасов промысловых биологических<br />
объектов акустическ<strong>им</strong> методом и др.);<br />
289
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
– градуировка гидроакустических средств (ГАС) с высок<strong>им</strong> энергетическ<strong>им</strong> потенциалом (развиваемое<br />
акустическое давление на расстоянии 1 м от излучателя порядка 10 5 Па и выше),<br />
– гидроакустическая калибровка района (определение величин поглощения и рассеяния акустической<br />
энергии, изучение акустических свойств звукорассеивающих слоев и др.);<br />
– испытание различных узлов и механизмов подводных РТС и др.;<br />
– проведение ряда вспомогательных работ, включая оборудование района маяками гидроакустической<br />
навигационной системы, тестирование систем подводного наблюдения в интересах противолодочной и<br />
противодиверсионной обороны, осмотр собственного корпуса непосредственно в море (ПЛ или корабляносителя<br />
стенда), тренировку операторов-гидроакустиков и др.<br />
Покажем только на двух пр<strong>им</strong>ерах целесообразность пр<strong>им</strong>енения ГГИС на базе Т<strong>Н</strong>ПА не только в<br />
интересах изучения особенностей распространения акустической энергии в реальной среде, но и для градуировки<br />
акустических систем ГАС, а также измерений гидроакустических полей кораблей, в том числе и<br />
подводных.<br />
В настоящее время при проведении калибровки акустических излучающих антенн в ГАС ВМФ<br />
используется типовая методика, согласно которой измерительный гидрофон размещается в дальнем поле<br />
антенны, а измеренные значения звукового давления пересчитываются к расстоянию 1 м от антенны. [8]<br />
Однако суммарные потери энергии за счет различных нелинейных эффектов: дисперсии, диссипации, искажения<br />
фронта волны, нелинейных поглощений и др. – могут на порядок и более превосходить обычное<br />
(линейное) затухание звука. Практика измерений амплитуды звукового давления, создаваемого антеннами<br />
ГАС с высок<strong>им</strong> энергетическ<strong>им</strong> потенциалом, показывает заметное несоответствие реальных величин и<br />
расчетных тактических параметров (дальность обнаружения морских объектов и др.), полученных на основе<br />
типовой методики измерений. В этой связи правильный выбор расстояния, на которое удален измерительный<br />
гидрофон в процессе градуировки излучающих антенн ГАС, позволяет с достаточной для<br />
практики точностью проводить акустические измерения в реальной морской воде. [2]<br />
Большой интерес представляет анализ процесса распространения возмущений в диссипативной<br />
среде при сильном проявлении нелинейности, степень которой принято характеризовать с помощью акустического<br />
числа Рейнольдса. Анализируя ситуацию, когда Re ак >>1, обычно пр<strong>им</strong>еняют метод поэтапного<br />
рассмотрения эволюции волны (Рис. 1).<br />
Рис. 1. Эволюция профиля акустической волны конечной амплитуды: а – исходная волна; б – образование гармоник;<br />
в – формирование пилообразной волны; г – восстановление профиля волны.<br />
Процесс распространения акустической волны конечной амплитуды условно можно разделить на<br />
три этапа: 0 < х < х р – этап накопления нелинейных эффектов; х р < х < х л – этап одновременного проявления<br />
нелинейных и диссипативных эффектов; х > х л – этап преобладания диссипативных эффектов над нелинейными.<br />
<strong>Н</strong>а первом этапе, до образования разрыва, поглощение мало и, можно считать, что возмущение<br />
также мало, чем отличается от волны Р<strong>им</strong>ана [6] и определяется решением Бесселя–Фубани. При этом<br />
расстояние разрыва х р (на котором возникают высшие гармоники основной частоты сигнала) определяется<br />
из условия ν ∂х = k и вычисляется по следующей формуле:<br />
∂ /<br />
ν = 0<br />
x = 1 , (1)<br />
p<br />
ε М k<br />
где ε – параметр нелинейности воды; М – акустическое число Маха; k – волновое число.<br />
<strong>Н</strong>а втором участке с накоплением искажений профиля волны, которая становится пилообразной<br />
(Рис. 1,в), амплитуды гармоник могут быть рассчитаны с помощью выражения, называемого решением<br />
Фея. Величина перепада скорости на «разрыве» растет до макс<strong>им</strong>альной величины 2ν 0 , что соответствует<br />
моменту формирования «пилы»:<br />
290
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
π<br />
x = х .<br />
(2)<br />
ф<br />
2 р<br />
<strong>Н</strong>а третьем этапе (Рис. 1,г) начинают преобладать диссипативные эффекты, так как энергия волны<br />
уменьшилась настолько, что распространение акустической волны вновь стало подчиняться законам линейной<br />
акустики, причем амплитуда волны уже не зависит от исходного возмущения ν 0 , то есть образование<br />
пилообразной волны ограничивает передачу через водную среду большой мощности. Расстояние х л ,<br />
на котором волна вновь приобретает синусоидальную форму (и достигается нелинейное насыщение), определяется<br />
с помощью выражения:<br />
4 Re<br />
x л<br />
= , (3)<br />
М k<br />
В этом случае амплитуда звукового давления не зависит от исходной Р 0 и определить ее величину традиционным<br />
методом [8] не возможно. [7]. Данное обстоятельство необход<strong>им</strong>о учитывать в процессе градуировки<br />
излучающих антенн современных гидролокаторов.<br />
Приведем пр<strong>им</strong>ер. Пусть акустическая антенна с апертурой 4 м излучает плоскую акустическую<br />
волну на частоте 3 кГц, при этом развиваемое ей звуковое давление на расстоянии 1 м от излучателя составляет<br />
~ 10 6 Па. Для таких параметров излучающей системы <strong>им</strong>еем: х р = 47 м, х ф = 74 м и х л =1150 м.<br />
Так<strong>им</strong> образом, измерительный гидрофон должен быть последовательно размещен на этих расстояниях от<br />
излучающей антенны ГАС, подвергающейся градуировке.<br />
Рассмотр<strong>им</strong> второе важное направление пр<strong>им</strong>енения ГГС. Проблема корректного измерения гидроакустического<br />
поля корабля, в первую очередь, остро стоит перед ВМФ, особенно в процессе непрекращающегося<br />
снижения шумности ПЛ мировых морских держав, а также для научно-исследовательских<br />
судов (<strong>Н</strong>ИС) и рыбопромысловых судов, ведущих промысел рыбы в международных водах. В большинстве<br />
развитых стран методы измерения собственного шума судов и контроля шумового загрязнения среды<br />
закреплены в нормативных документах, национальных и международных стандартах. Введением запретов<br />
на превышение нормативов по уровню шума в борьбе за мировые биоресурсы технологически более<br />
сильные страны (напр<strong>им</strong>ер, США) постараются вытеснить из наиболее перспективных международных<br />
промысловых районов суда других стран, в том числе и России. Совершенно не случайно, к проблеме<br />
снижения шумности <strong>Н</strong>ИС подключены соответствующие специалисты ВМС США [3].<br />
Подводный шум корабля излучается и распространяется (с учетом рефракции, объемного затухания,<br />
потерь энергии в донных слоях моря, рассеяния в звукорассеивающих слоях и на поверхности и др.)<br />
крайне неравномерно, как в горизонтальной, так и в вертикальной плоскостях. При движении корабля на<br />
малых (3...5 уз) скоростях хода пространственное распределение уровней подводного шума в значительной<br />
мере зависит от направленности и уровней шумоизлучения судовых механизмов. В то время как на<br />
повышенных (более 10 уз) скоростях – близко к равномерному и существенно превосходит уровень предыдущего.<br />
<strong>Н</strong>а рис. 2 дан пр<strong>им</strong>ер диаграмм направленности первичного гидроакустического поля судна.<br />
Выбор расстояния R, на котором производятся измерения, должен быть сделан в каждом конкретном случае<br />
исходя из глубины района <strong>Н</strong>, геометрии морского полигона и гидролого-акустических условий в нем.<br />
Рекомендуется также провести предварительно оценку границ ближней и дальней зон первичного гидроакустического<br />
поля корабля (ПГАП), т. е. провести измерения на различных расстояниях от корабля, как в<br />
горизонтальной, так и вертикальной плоскости, а также выявить характерные соотношения амплитуд<br />
спектральных макс<strong>им</strong>умов и дискретных составляющих в нем.<br />
Рис. 2. Пространственное распределение первичного гидроакустического поля судна:<br />
а – горизонтальная плоскость; б – вертикальная плоскость<br />
291
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
В настоящее время в ВМФ для измерения ПГАП используют обычно два метода. В процессе реализации<br />
первого метода измерения производят в дальнем поле – зоне Фраунгофера – при помощи одиночного<br />
гидрофона. При реализации второго измерения осуществляют аналогичным образом, но с помощью<br />
пространственно распределенных в вертикальной и (или) горизонтальной плоскостях гидроакустических<br />
систем, состоящих из нескольких гидрофонов. Достоинством первого метода является его простота, а<br />
также незначительные финансово-временные затраты на реализацию. Второй метод является более точным,<br />
а также позволяет дополнительно получать информацию о пространственном распределении ПГАП,<br />
но является более сложным при реализации и высоко затратным [3; 8].<br />
Мин<strong>им</strong>альное расстояние до обмеряемого объекта (ПЛ или корабля), на котором возможно корректное<br />
проведение измерений его ПГАП на верхней границе инфразвукового диапазона частот:<br />
2<br />
AL<br />
max<br />
R<br />
min<br />
= , (4)<br />
λ<br />
где L – макс<strong>им</strong>альный линейный размер обмеряемого объекта, формирующего излучаемую волну длины<br />
λ; А – коэффициент (А = 4-6).<br />
Исходя из возможности «работы» всего корпуса объекта (с линейными размерами L max = 150 м) в<br />
качестве источника упругих колебаний на частоте 20 Гц (длина волны 75 м), при среднем значении коэффициента<br />
А, мин<strong>им</strong>альное расстояние R min , на котором необход<strong>им</strong>о разместить измерительную систему,<br />
должно быть не менее 1500 м. Данная величина в несколько раз превосходит рекомендуемые руководящ<strong>им</strong>и<br />
документами ВМФ измерительные расстояния. Следует отметить, напр<strong>им</strong>ер, что военнотехнический<br />
совет ВМФ в своем решении (№ 740/073 от 17 мая 1999 г.) указал на недостаточную точность<br />
измерений ПГАП существующ<strong>им</strong>и методами и средствами.<br />
Совершенно очевидно, что на практике в рассмотренных выше случаях с мин<strong>им</strong>альными финансово-временными<br />
затратами реализовать гидроакустические измерения можно только с помощью ГГИС<br />
на базе Т<strong>Н</strong>ПА, который по сути является самоходной мобильной платформой, оснащаемой под конкретные<br />
задачи и позволяющей в завис<strong>им</strong>ости от набора навесного оборудования при достижении определенного<br />
уровня универсальности носителя сменных модулей выполнять широкий спектр работ. При этом<br />
обеспечивается: простота испытательных операций и возможность проведения гидроакустических измерений<br />
на значительных расстояниях от источника и / или в нескольких расчетных точках с высокой точностью<br />
позиционирования; непрерывные относительные измерения в процессе перемещения излучателя<br />
или приемника; одновременное получение данных в реж<strong>им</strong>е реального времени с различных датчиков и<br />
приборов освещения подводной обстановки. Т<strong>Н</strong>ПА может работать и как часть измерительной системы и<br />
как постановщик гидрофонов в точках измерений.<br />
Сформулируем перечень необход<strong>им</strong>ых технических (гидроакустических) и визуальных средств<br />
подводного наблюдения: набор калиброванных измерительных гидрофонов с диапазонам рабочих частот<br />
от 1 Гц до 1 МГц; набор калиброванные излучателей с диапазоном рабочих частот от 1 кГц до 1 МГц; векторно-фазовый<br />
приемник; сейсмоприемник; параметрический приемник; параметрический излучатель;<br />
гидролокаторы бокового, секторного и кругового обзора, звуковизор, цветная видеокамера высокого разрешенияи<br />
и черно-белая камера низкой освещенности и др.<br />
Анализ возможности использования в качестве носителя ГГИС существующих на рынке необитаемых<br />
подводных аппаратов с рабочей глубиной до 1000 м [5,6] показал, что с точки зрения таких основных<br />
частных показателей эффективности как: рабочая глубина, коэффициент: «полезная нагрузка/масса в<br />
воздухе», коэффициент: «упор-масса» в соответствующей плоскости, а также сто<strong>им</strong>ость – следует отдать<br />
предпочтение Т<strong>Н</strong>ПА «Navajo» производства Sub-Atlantic Ltd., Великобритания (Рис. 3).<br />
Рис. 3. Т<strong>Н</strong>ПА «Navajo» с подвесным модулем для подводного инструмента<br />
292
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
В рамках проведения <strong>Н</strong>ИОКР необход<strong>им</strong>о разработать собственный дизайн Т<strong>Н</strong>ПА для ГГИС со<br />
следующ<strong>им</strong>и особенностями: открытая модульная конструкция с мин<strong>им</strong>альной подводной парусностью;<br />
легкая несущая рама из неметаллических материалов; векторные горизонтальные и вертикальные движители;<br />
бортовые системы позиционирования, инерциальной навигации, самодиагностики, аварийного<br />
всплытия, полезная нагрузка до 35 кг, масса до 150 кг, радиус действия до 3 км, рабочая глубина до<br />
1000 м, скорость подводного хода не менее 3,5 уз.<br />
Л И Т Е Р А Т У Р А<br />
1. Автономные необитаемые подводные аппараты / Под общ. ред. Акад. М.Д. Агеева.. – Вл-к.: Дальнаука, 2000. – 272<br />
с.<br />
2. Бахарев С.А. Особенности калибровки антенн современных рыбопоисковых гидролокаторов // Международная<br />
<strong>Н</strong>ТК «Рыбохозяйственные исследования Мирового океана». Ч. 1. – Вл-к.: Дальрыбвтуз, 1999. – С.71-73.<br />
3. Бахарев С.А., Халиулов Ф.А., Чудаков А.И. Методология измерения гидроакустического поля рыбопромыслового<br />
судна с буксируемым орудием лова // <strong>Н</strong>аучные труды Дальрыбвтуза. Вып.13. – Вл-к, Дальрыбвтуз, 2000. – С.37-41.<br />
4. Бахарев С.А., Завалко Е.В., Рогожников А.В. Использование дистанционных размыкателей для обслуживания морских<br />
платформ // Морская радиоэлектроника: журн. – 2009. – № 4. – С. 56-59.<br />
5. Бахарев С.А., Дремлюга Г.П., Рогожников А.В. Использование автономных необитаемых подводных аппаратов в<br />
процессе изучения Мирового океана // Морская радиоэлектроника: журн. – 2010. – №3–4. – С.80-86.<br />
6. Бахарев С.А., Дремлюга Г.П., Рогожников А.В. Использование телеуправляемых необитаемых подводных аппаратов<br />
в процессе изучения Мирового океана // Морская радиоэлектроника: журн. – 2010. – в печати.<br />
7. Зарембо Л.К., Красильников В.А. Введение в нелинейную акустику. – М.: <strong>Н</strong>аука, 1966. – 520 с.<br />
8. Урик Р. Дж. Основы гидроакустики. – Л.: Судостроение, 1978. – 444 с.<br />
УДК 534.6.08, 534-143<br />
<strong>Н</strong>.М. Буднев, А.В. Коробченко, А.Л. Паньков, Л.В. Паньков, А.А. Перевалов<br />
БАЙКАЛЬСКИЙ АКУСТИЧЕСКИЙ <strong>Н</strong>ЕЙТРИ<strong>Н</strong><strong>Н</strong>ЫЙ ДЕТЕКТОР СТАТУС И<br />
ПЕРСПЕКТИВЫ<br />
<strong>Н</strong>ИИПФ ГОУ ВПО «Иркутский государственный университет»<br />
Россия, 664003 Иркутск, б. Гагарина, 20<br />
Тел.: (3952) 33-21-70; Факс: (3952) 33-21-40; E-mail: nbudnev@api.isu.ru<br />
Сообщается о статусе и перспективах детектирования космических нейтрино акустическ<strong>им</strong>и методами. Приведены результаты<br />
изучения шумовой обстановки на озере Байкал в разрезе данной задачи. Показано, что большинство «нейтриноподобных»<br />
<strong>им</strong>пульсов приходят с поверхности озера. Данный факт используется при проектировании Модулей акустического<br />
детектора, которые, используя направленные антенны, выделяют события приходящие из глубин озера.<br />
Введение<br />
Прошло пятьдесят лет с тех пор как М. Марков предложил построить в Океане оптический черенковский<br />
массив для поиска высокоэнергетичных космических нейтрино [1]. В 1998 году на озере Байкал был построен<br />
первый подводный нейтринный телескоп NT200 [2]. Позже были введены в эксплуатацию другие<br />
нейтринные телескопы, такие как AMANDA/IceCube на Южном полюсе и ANTARES в Средиземном море.<br />
Коллаборация Байкал в течение нескольких лет ведёт программу по разработке и исследованию кубокиллометрового<br />
водного детектора (Baikal-GVD) на озере Байкал. Из последних достижений можно выделить<br />
разработку и установку нового экспер<strong>им</strong>ентального стринга в 2008 – 2010 гг. [3]. Основная научная<br />
задача подобных детекторов – это поиск высокоэнергетичных космических нейтрино.<br />
Потенциал акустической регистрации нейтрино [4] основан на том, что длина затухания акустического<br />
сигнала для диапазона 5-30 кГц (опт<strong>им</strong>альный диапазон для акустических сигналов от ливней космических<br />
частиц) в морской воде на порядок выше, чем для черенковского света. В пресной байкальской воде<br />
это соотношение достигает 100 [5]. В действительности возможность акустической регистрации нейтрино<br />
высоких энергий и энергетический порог регистрации зависят от следующих факторов: (1) амплитуда и<br />
другие параметры акустического сигнала, вызванного вза<strong>им</strong>одействием нейтрино или других высокоэнергетичных<br />
частиц с водой, (2) шумовые характеристики используемого водного объёма, (3) аппаратные и<br />
программные средства детектирования и отделения полезного сигнала от окружающего шума.<br />
Мы уже рассмотрели теоретические основы акустической регистрации нейтрино в предыдущем докладе<br />
[6]. В данной работе мы сообщаем о статусе и первых результатах наших работ по разработке акустического<br />
детектора нейтрино на озере Байкал.<br />
Шумовая обстановка<br />
Возможность акустической регистрации нейтрино, на первый взгляд, зависит от обычно изучаемых статистических<br />
характеристик окружающего шума, таких как: уровень акустических шумов в соответствующей<br />
полосе частот и его изменения, спектральная плотность мощности шума и наклон спектра. В дополнение к<br />
293
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
этому, чувствительность детектора зависит в значительной мере от плотности и распределения источников<br />
«нейтрино-подобных» биполярных сигналов и от того насколько часто такие сигналы генерируются<br />
данными источниками.<br />
Для изучения шумовой обстановки на озере Байкал был построен автономный гидроакустический датчик<br />
с двумя входными каналами и записью данных [7], а также гидроакустический модуль с четырьмя входными<br />
каналами расположенными в углах тетраэдра с длиной ребра 1.5 м [8]. Долгосрочный мониторинг<br />
шумовой обстановки с данными приборами показал что спектральная плотность мощности шума в озере<br />
Байкал уменьшается со средн<strong>им</strong> наклоном 5-6 dB/octave (см. подробнее [7]). Уровень шума в<br />
наибольшей степени зависит от условий на поверхности озера из-за слабого затухания высокочастотных<br />
акустических сигналов в пресной воде. При стационарных гомогенных метеорологических условиях среднеквадратичный<br />
уровень шума в диапазоне 5-20 кГц составляет 5 мПа, как можно видеть на Рис. 1.Для<br />
определения свойств шума, на фоне которого необход<strong>им</strong>о регистрировать каскады, продуцируемые нейтрино<br />
мы проанализировали амплитудно-временные характеристики байкальского шума в высокочастотном<br />
диапазоне. <strong>Н</strong>есколько лет изучения акустического шума показали, что основной вклад дают переходные<br />
шумовые процессы с небольшой длительностью <strong>им</strong>пульсов [7, 9].<br />
Рис. 1. СКО интегральной мощности шума в озере Байкал в диапазоне 5-20 кГц.<br />
Прин<strong>им</strong>ая во вн<strong>им</strong>ание то, что основная часть шумовых источников (волны, ветер, дождь, корабли, источники<br />
биполярных <strong>им</strong>пульсов и т.д.) находятся около поверхности, мы установили гидроакустический<br />
модуль с четырьмя входными каналами на глубину 150 м (на одном из стрингов NT200+) для долгосрочного<br />
наблюдения шума. Так<strong>им</strong> образом, детектор «слушает» воду сверху вниз. Рис. 2 изображает плотность<br />
распределения реконструированных акустических событий в завис<strong>им</strong>ости от аз<strong>им</strong>утального и зенитного<br />
углов. Для около 7000 реконструированных биполярных акустических <strong>им</strong>пульсов было обнаружено,<br />
что зенитный угол прихода 90°<br />
ожидаемы ввиду рефракции акустических лучей). Было зарегистрировано только одно событие, пришедшее<br />
из глубин озера, у него зенитный угол 176° и оно изолированно от остальных (см. Рис. 2).<br />
Рис. 2. Распределение реконструированного зенитного и аз<strong>им</strong>утального углов для биполярных <strong>им</strong>пульсов.<br />
После установки сетки из детекторов установленных на глубинах 100-200 м будет доступна более подробная<br />
информация относительно источников биполярный «нейтрино-подобных» <strong>им</strong>пульсов и их свойств.<br />
294
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Программа разработки прототипа модулей для данной установки была начата в 2009 году. Основные особенности<br />
устройства отражены в следующей секции.<br />
Прототип акустического детектора для высокоэнергетичных нейтрино<br />
Идея акустической регистрации нейтрино базируется на том, что электромагнитные каскады, образующиеся<br />
от вза<strong>им</strong>одействия нейтрино с водой должны производить биполярные акустические <strong>им</strong>пульсы.<br />
Ожидаемая длительность таких <strong>им</strong>пульсов порядка нескольких десятков микросекунд. Большая часть акустической<br />
энергии сигнала концентрируется в диске, ось которого совпадает с осью каскада. Эта особенность<br />
может быть использована для поиска таких сигналов.<br />
<strong>Н</strong>еобход<strong>им</strong>ым для детектора являются устройства способные детектировать сигналы определённой формы<br />
и интерпретировать их в терминах плоских волн, генерируемых квазилокальными источниками. Такие<br />
устройства мы будем называть Модуль акустического детектора (МАД).<br />
В течение ближайших лет мы собираемся установить на озере Байкал прототип акустического нейтринного<br />
детектора. Он будет состоять, по меньшей мере, из трёх стрингов.<br />
Каждый стринг будет оборудован четырьмя МАД на глубинах 125, 150, 175 и 200 м. Для выделения слабых<br />
«нейтрино-подобных» <strong>им</strong>пульсных сигналов и реконструкции направления на источник <strong>им</strong>пульса<br />
каждый МАД будет оснащён акустической антенной из четырёх гидрофонов. Опт<strong>им</strong>альное расстояние<br />
между гидрофонами определяется тем, что оно наверняка должно превышать несколько длин волн самой<br />
низкой частоты из спектра ожидаемого сигнала, но, с другой стороны, оно не должно быть слишком<br />
больш<strong>им</strong> для того, чтобы уменьшить количество шумовых переходных <strong>им</strong>пульсов, попадающих во временное<br />
окно регистрации. Так<strong>им</strong> образом, для данных приборов мы устанавливаем гидрофоны в пирамидо-подобную<br />
геометрию с равными расстояниями между гидрофонами около 1.5 м (см. Рис. 3).<br />
В качестве сенсоров мы используем специальные волноводные гидрофоны (Рис. 3), <strong>им</strong>еющие достаточно<br />
ровную чувствительность в диапазоне 10-30 кГц. Волноводные гидрофоны <strong>им</strong>еют достаточно высокую<br />
направленность, что используется для подавления влияния шума с поверхности озера.<br />
Аналоговая часть МАД базируется на чипе AD743 с ультранизк<strong>им</strong> шумовым током 6.9 fA и чипе<br />
OPA1632DGN – дифференциальном усилителе, так<strong>им</strong> образом, используется дифференциальный сигнал<br />
при передаче по кабелям для избегания дополнительных помех. Для дальнейшего усиления сигнала<br />
мы используем операционный усилитель аудио-сигналов PGA2500 с дифференциальным выходом и<br />
программируемым усилением. Сигналы оцифровываются на частоте 192 кГц и динамическ<strong>им</strong> диапазоном<br />
24 бита при помощи сигма-дельта АЦП ADC-PCM4204. Для уменьшения потока «сырых» данных<br />
данные проходят предобработку в самих МАД при помощи ЦСП OMAPL138. Для внутренней<br />
коммуникации между МАД и для связи с береговой системой сбора данных используется компьютер<br />
PICOe-Atom.<br />
Рис. 3. Антенна Модуля акустического детектора с четырьмя гидрофонами (в левом нижнем углу) расположенными<br />
в вершинах пирамиды.<br />
Алгоритм поиска «нейтрино-подобных» акустических сигналов<br />
У алгоритма детектирования две основные задачи: нахождение сигналов превышающих некоторых<br />
порог и динамическая корректировка порога детектирования на основании статистических свойств<br />
шума.<br />
295
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Программа распознаёт следующие свойства сигнала: временные координаты <strong>им</strong>пульса, количество<br />
периодов, макс<strong>им</strong>альная амплитуда и т.п. Импульсы классифицируются на основании данных параметров,<br />
и информация о них сохраняется в соответствующих динамических массивах.<br />
Процедура фильтрации:<br />
Прин<strong>им</strong>аются события удовлетворяющие условию<br />
∆ t ij<br />
< ktmax<br />
для ∆ tij<br />
= ti<br />
− t<br />
j<br />
L c<br />
. Где t<br />
i<br />
– время регистрации<br />
сигнала в i-м акустическом канале, t<br />
max<br />
= /<br />
s<br />
– время распространения звука между гидрофонами,<br />
L – расстояние между соседн<strong>им</strong>и гидрофонами, c<br />
s<br />
– скорость звука на глубине расположения<br />
антенны и k = 1. 2 допуск для оценки ∆ tij<br />
.<br />
Оценка направления:<br />
<strong>Н</strong>а конечной стадии алгоритма мы получаем углы прихода θ, φ путём мин<strong>им</strong>изации функционала<br />
4<br />
S ( θ,<br />
φ)<br />
:<br />
∑ (<br />
~ 2 1<br />
S = ti<br />
− t ) , t t<br />
r<br />
r<br />
n r<br />
i 2 i<br />
=<br />
0<br />
+ (<br />
i<br />
−<br />
0)<br />
⋅<br />
i=<br />
1 σ<br />
ti<br />
где t<br />
~<br />
i<br />
– ожидаемое время начала сигнала во временном ряде; ti<br />
– измеренное время начала сигнала;<br />
r 2<br />
0<br />
– координаты центра пирамиды; t<br />
0<br />
– время прихода волны в центр пирамиды; σ<br />
t i<br />
– отклонения<br />
временных координат; n r ( θ,<br />
φ)<br />
– волновой вектор пришедшего сигнала.<br />
<strong>Н</strong>ами был разработан передатчик биполярных <strong>им</strong>пульсов для калибровки. Передатчик располагался<br />
на расстоянии 50 м от антенны МАД. Было обработано около 2000 событий. СКО для реконструированных<br />
углов прихода составили:<br />
o<br />
o<br />
σ<br />
φ<br />
≈1.5 , σ<br />
θ<br />
≈ 0.5 .<br />
Заключение<br />
Акустическое детектирование нейтрино в Байкале и других естественных водоёмах является достаточно<br />
сложной задачей ввиду высокого уровня шумов. Сравнение результатов моделирования<br />
свойств акустических <strong>им</strong>пульсов от нейтрино и свойств шумов озера Байкал показывают, что энергетический<br />
порог детектирования в озере порядка10 − 10 эВ. Прин<strong>им</strong>ая во вн<strong>им</strong>ание, что источники<br />
19 20<br />
шума (включая шумовые биполярные <strong>им</strong>пульсы) сосредоточены на поверхности, мы предложили<br />
модель детектора с направленными антеннами на относительно небольшой глубине (100-200 м). В<br />
этом году началась разработка прототипа акустического детектора. В марте 2011 был установлен<br />
экспер<strong>им</strong>ентальный стринг с тремя МАД второго поколения оборудованными антеннами с четырьмя<br />
гидрофонами.<br />
Л И Т Е Р А Т У Р А<br />
1. Markov M.A. On high energy neutrino physics // Proc. 1960 Annual Int. Conf. on High Energy Phys., Rochester. — 1960. —<br />
P.578.<br />
2. Aynutdinov V. et al. Search for a diffuse flux of high-energy extraterrestrial neutrinos with the nt200 neutrino telescope // Astroparticle<br />
Physics. — 2006. — V. 25. — P. 140–150.<br />
3. Aynutdinov V. et al. The Baikal Neutrino experiment – physics results and perspectives // Nuclear Instruments and Methods in<br />
Physics Research A. — 2009. — V.602, №20 — P.14.<br />
4. Askariyan G.A., Dolgoshein B.A., Kalinovsky A.N., Mokhov N.V. Acoustic detection of high energy particles showers in water<br />
// Nuclear Instruments and Methods in Physics Research. — 1979. — V.164, №.2. — P. 267–278.<br />
5. Клей К., Медвин Г. Акустическая океанография. — М.: Мир, 1980. — 580 с.<br />
6. Айнутдинов В.М. Исследования возможности акустической регистрации нейтрино на озере Байкал: статус и перспективы.<br />
/ В.М.Айнутдинов, В.А.Балканов , И.А.Белолаптиков и др. // Сб. Трудов ХХ сессии РАО. Акустические измерения<br />
и стандартизация. Электроакустика. Ультразвук и ультразвуковые технологии. Атмосферная акустика. Акустика<br />
океана. — Т. 2. — М.: ГЕОС, 2008. — С. 178–181.<br />
7. Айнутдинов В.М. и др. Высокочастотные акустические шумы озера Байкал // <strong>Акустический</strong> журнал. — 2006. — Т.52,<br />
№.5. — С. 581–591.<br />
8. Aynutdinov V. et al. High energy neutrino acoustic detection activities in Lake Baikal: Status and results // Nuclear Instruments<br />
and Methods in Physics Research A. — 2009. — V.604. — P. 130–135.<br />
9. Aynutdinov V. et al. High Frequency Noise in Lake Baikal as a Background for the Acoustic Detection of High Energy Neutrinos<br />
// Int. Journal of Modern Physics A. — 2006. — V. 21, №. supp01 (July 2006) . — P.117–121.<br />
296
S N , θ = s(0),<br />
s(1),...,<br />
s(<br />
N −1)<br />
- вектор коэффициентов разложения X N по системе параметрических дискретных<br />
экспоненциальных функций (ДЭФ – П), задаваемой матрицей F N , θ :<br />
0 1 . . ( N −1)<br />
n<br />
θ<br />
θ ( N −1)<br />
0 ⎡ 1 WN<br />
. . WN<br />
⎤<br />
.<br />
⎢<br />
⎥<br />
F<br />
⎢<br />
. . . . .<br />
⎥<br />
N = , (1)<br />
, θ ( N −1+<br />
θ )<br />
( N −1+<br />
θ )( N −1)<br />
( N −1)<br />
⎢ 1 W . . W<br />
⎥<br />
N<br />
⎢<br />
⎥<br />
k<br />
⎣<br />
⎦<br />
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
УДК 621.372<br />
В.А. Пономарев, О.В. Пономарева<br />
БЫСТРОЕ ПРЕОБРАЗОВА<strong>Н</strong>ИЕ ФУРЬЕ В БАЗИСЕ ПАРАМЕТРИЧЕСКИХ<br />
ДИСКРЕТ<strong>Н</strong>ЫХ ЭКСПО<strong>Н</strong>Е<strong>Н</strong>ЦИАЛЬ<strong>Н</strong>ЫХ ФУ<strong>Н</strong>КЦИЙ<br />
Ижевский государственный технический университет<br />
Россия, г. Ижевск, пл. 50 лет октября,15<br />
Тел.: (3412) 68-25-28, +7-912-856-59-67; факс: (3412) 68-29-79<br />
E-mail: cikur@udmnet.ru<br />
Рассматриваются алгоритмы быстрого преобразования Фурье (БПФ-П) в базисе параметрических дискретных экспоненциальных<br />
функций (ДЭФ-П), суть которых заключается в факторизации матриц ДЭФ-П, основанной на использовании<br />
периодичности и с<strong>им</strong>метричности ДЭФ-П.<br />
Метод дискретного преобразования Фурье (ДПФ) пр<strong>им</strong>еняется в цифровой обработке речевых и звуковых<br />
сигналов, изображений, измерительной информации, в системах управления и диагностирования<br />
объектов. Широкое распространение данного метода во многом стало возможным благодаря существованию<br />
алгоритмов быстрого преобразования Фурье, суть которых заключается в факторизации матрицы<br />
ДПФ и в конечном счете, использовании периодичности и с<strong>им</strong>метричности дискретных экспоненциальных<br />
функций (ДЭФ).<br />
В докладе рассматривается быстрое параметрическое преобразование Фурье (БПФ-П) в базисе параметрических<br />
дискретных экспоненциальных функций (ДЭФ-П):<br />
Пара преобразований ДПФ-П в матричной форме задается следующ<strong>им</strong>и соотношениями [1,3,4]:<br />
1<br />
*<br />
S N ,θ = FN<br />
, θ X N ; X N = FN<br />
, θ S N , θ , 0 ≤ θ < 1.<br />
N<br />
где θ - параметр, * - знак комплексного сопряжения, X [ ] T<br />
N = x( 0), x(1),...,<br />
x(<br />
N −1)<br />
- представление дискретного<br />
сигнала x(n), n = 0,<br />
N −1, в виде вектора N - мерного линейного пространства; Т- знак транспонирования;<br />
[ ] T<br />
где: строки матрицы F N,θ являются функциями ДЭФ-П:<br />
( k + θ ) n ⎡ 2π<br />
⎤<br />
def p ( k,<br />
n,<br />
θ ) = WN<br />
= exp⎢−<br />
j ( k + θ ) n⎥,<br />
0 ≤ θ < 1; k , n = 0, N −1,<br />
⎣ N ⎦<br />
Полагая, что N = rs , где r – простое число, любую строку матрицы F N,θ (1) можно представить в виде<br />
[1]:<br />
r(<br />
k + θ )<br />
r(<br />
k + θ )<br />
α α α W α ,..... W α<br />
(2)<br />
[ ] [ ,<br />
k, n<br />
=<br />
k,0,......,<br />
k,(<br />
r−1)<br />
,<br />
N k,0<br />
N k,(<br />
r−1)<br />
W<br />
2r(<br />
k+<br />
θ )<br />
2r(<br />
k+<br />
θ )<br />
( s−1)<br />
r(<br />
k+<br />
θ )<br />
( s−1)<br />
r(<br />
k+<br />
θ )<br />
N α k,0<br />
,..... W α k,(<br />
r−1)<br />
,...., WN<br />
α k,0<br />
,....., WN<br />
α k(<br />
r−1)<br />
=<br />
k,0,...,<br />
α<br />
k ,( r−1)<br />
α запишем выражение (2) в более компактной форме:<br />
(1)<br />
Вводя обозначение Rk<br />
[ ]<br />
(1) r(<br />
k + θ ) (1) ( s−1)<br />
r(<br />
k + θ ) (1)<br />
[ α ] [ R W R W R ]<br />
k, n =<br />
k<br />
, N k<br />
,..., N<br />
k<br />
(3)<br />
С учетом периодичности функций W N (период 2π) нетрудно установить, что выражение (3) <strong>им</strong>еет s<br />
различных форм:<br />
(1) rθ<br />
(1) ( s−1)<br />
rθ<br />
(1)<br />
[ α k, n ] = [ Rk<br />
, WN<br />
Rk<br />
,..., WN<br />
Rk<br />
]; ((k)) s =0<br />
(1) r(1+<br />
θ ) (1) ( s−1)<br />
r(1+<br />
θ ) (1)<br />
[ α k, n ] = [ Rk<br />
, WN<br />
Rk<br />
,..., WN<br />
Rk<br />
]; ((k)) s =1, (4)<br />
(1) r(<br />
s−1+<br />
θ ) (1) ( s−1)<br />
r(<br />
s−1+<br />
θ ) (1)<br />
[ α k, n ] = [ Rk<br />
, WN<br />
Rk<br />
,..., WN<br />
Rk<br />
]; ((k)) s = s-1,<br />
где ((k)) s – с<strong>им</strong>вол операции сравнения k по модулю s.<br />
Так<strong>им</strong> образом, матрица F (1) с учетом (4) может быть представлена в виде:<br />
N , θ<br />
297<br />
]
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
<strong>Н</strong>етрудно видеть, что представленную так<strong>им</strong> образом матрицу ДЭФ-П можно разложить на множители:<br />
F<br />
N , θ =<br />
0 ⎡<br />
.<br />
⎢<br />
⎢<br />
s −1<br />
⎢<br />
⎢<br />
. ⎢<br />
( r −1)<br />
s + 1⎢<br />
⎢<br />
. ⎢<br />
N −1<br />
⎢<br />
⎣<br />
k<br />
R<br />
R<br />
R<br />
0<br />
(1)<br />
0<br />
.<br />
(1)<br />
s−1<br />
.<br />
(1)<br />
( r−1)<br />
s+<br />
1<br />
R<br />
.<br />
(1)<br />
rs−1<br />
W<br />
W<br />
W<br />
W<br />
r(<br />
s−1+<br />
θ )<br />
N<br />
r(1+<br />
θ )<br />
N<br />
1<br />
rθ<br />
N<br />
.<br />
.<br />
R<br />
.<br />
R<br />
r(<br />
s−1+<br />
θ )<br />
N<br />
(1)<br />
0<br />
R<br />
(1)<br />
s−1<br />
(1)<br />
( r−1)<br />
s+<br />
1<br />
R<br />
(1)<br />
rs−1<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
W<br />
W<br />
W<br />
W<br />
s −1<br />
( s−1)<br />
rθ<br />
N<br />
.<br />
( s−1)<br />
r(<br />
s−1+<br />
θ )<br />
N<br />
.<br />
( s−1)<br />
r(1+<br />
θ )<br />
N<br />
.<br />
R<br />
R<br />
( s−1)<br />
r(<br />
s−1+<br />
θ )<br />
N<br />
(1)<br />
0<br />
R<br />
(1)<br />
s−1<br />
(1)<br />
( r−1)<br />
s+<br />
1<br />
F<br />
N , θ =<br />
F Q<br />
1<br />
1<br />
0 ⎡ R0<br />
1<br />
⎢<br />
⎢<br />
.<br />
. ⎢ .<br />
⎢ (1)<br />
( r − 1) s<br />
=<br />
⎢ R(<br />
r −<br />
.<br />
. ⎢ .<br />
⎢<br />
( r − 1) s + s − 1⎢<br />
.<br />
. ⎢ .<br />
⎢<br />
rs − 1 ⎢⎣<br />
.<br />
0<br />
(1)<br />
1) s<br />
R<br />
1<br />
.<br />
(1)<br />
(1)<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
R<br />
s − 1<br />
(1)<br />
( r −1)<br />
s+<br />
s−1<br />
R<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
(1)<br />
rs −1<br />
R<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
×<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥⎦<br />
(1)<br />
rs−1<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
(5)<br />
(6)<br />
0 ⎡<br />
1<br />
⎢<br />
× ⎢<br />
. ⎢<br />
⎢<br />
s − 1⎣<br />
I<br />
I<br />
I<br />
0<br />
.<br />
r<br />
r<br />
r<br />
W<br />
W<br />
rθ<br />
N I r<br />
r (1+<br />
θ )<br />
N I r<br />
W<br />
1<br />
.<br />
r ( s−1+<br />
θ )<br />
N I r<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
W<br />
W<br />
s − 1<br />
( s−1)<br />
rθ<br />
N I r<br />
( s−1)<br />
r (1+<br />
θ )<br />
N I r<br />
W<br />
.<br />
( s−1)<br />
r ( s−1+<br />
θ )<br />
N I r<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
где I r - единая матрица r × r .<br />
Когда s не является простым числом, процедура факторизации может быть вновь пр<strong>им</strong>енена к матрице<br />
Q 1 , так как ее структура аналогична структуре исходной матрицы, отличие состоит лишь в том, что<br />
элементы матрицы Q 1 являются матрицами размером r × r :<br />
0 1 . . r −1<br />
W<br />
rθ<br />
N I r<br />
0 ⎡ W<br />
1<br />
⎢<br />
⎢<br />
= . ⎢<br />
⎢<br />
. ⎢<br />
s −1⎢<br />
⎣<br />
rθ<br />
N<br />
Действительно, пусть s = l g , где l – простое число. Тогда, пр<strong>им</strong>еняя процедуру факторизации к матрице<br />
Q 1, получ<strong>им</strong> Q 1 = F2Q2<br />
и F N , ϑ = F1<br />
F2Q2<br />
.<br />
(2)<br />
k<br />
r(<br />
k + θ ) ( t−1)<br />
r(<br />
k +θ )<br />
r<br />
r<br />
Вводя обозначение R [ I W I ,.... N I ] ,<br />
r<br />
W<br />
rθ<br />
N<br />
.<br />
.<br />
W<br />
rθ<br />
N<br />
⎤<br />
⎥<br />
⎥<br />
⎥ .<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
= матрицу Q 1 можно представить как<br />
298
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Q = F Q<br />
1<br />
2<br />
2<br />
0<br />
(2)<br />
0<br />
0 ⎡ R<br />
⎢<br />
⎢<br />
.<br />
= q −1⎢<br />
.<br />
⎢<br />
⎢ .<br />
s −1⎢<br />
⎣ .<br />
1<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
q −1<br />
R<br />
R<br />
.<br />
.<br />
(2)<br />
q−1<br />
.<br />
(2)<br />
lq−1<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
x (7)<br />
x<br />
0 ⎡<br />
1<br />
⎢<br />
⎢<br />
. ⎢<br />
⎢<br />
. ⎢<br />
. ⎢<br />
⎢<br />
q − 1⎢⎣<br />
I<br />
I<br />
I<br />
0<br />
rl<br />
rl<br />
.<br />
.<br />
.<br />
rl<br />
W<br />
W<br />
lθ<br />
N I rl<br />
l(1+<br />
θ )<br />
N I rl<br />
W<br />
1<br />
.<br />
.<br />
.<br />
l(<br />
g−1+<br />
θ )<br />
N I rl<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
W<br />
W<br />
g − 1<br />
( g−1)<br />
lθ<br />
N I rl<br />
( g−1)<br />
l(1+<br />
θ )<br />
N I rl<br />
W<br />
.<br />
.<br />
.<br />
( g−1)<br />
l(<br />
g−1+<br />
θ )<br />
N I rl<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥ ,<br />
⎥<br />
⎥<br />
⎥<br />
⎥⎦<br />
где I rl - единичная матрица размером rl × rl . Если и число q составное, то процедура факторизации пр<strong>им</strong>еняется<br />
к матрице Q 2 и т.д.<br />
Очевидно, чем большее число простых сомножителей содержит число N, тем более эффективны быстрые<br />
процедуры вычисления ДПФ-П за счет того, что матрица ДЭФ-П может быть разложена на большее<br />
число сомножителей, содержащих большое число нулевых элементов.<br />
БПФ-П для определения спектра S N,θ в базисе ДЭФ-П с учетом факторизации матрицы F N,θ может<br />
быть проведено в p этапов<br />
1<br />
1<br />
S N , = FN<br />
, X N = F1<br />
F2<br />
.... Fp<br />
X ,<br />
θ θ<br />
N<br />
N N<br />
где F 1F2<br />
.... Fp<br />
- сомножители матрицы ДЭФ-П F N,θ .<br />
Предполагаемое быстрое параметрическое преобразование Фурье, являющееся обобщением стандартного<br />
БПФ, может быть пр<strong>им</strong>енено при решении практических задач в различных областях научных<br />
исследований. <strong>Н</strong>апр<strong>им</strong>ер, при спектральном анализе дискретных случайных процессов со скрытыми периодичностями<br />
проводят дополнение нулевыми отсчетами с целью улучшения условий различения гармонических<br />
компонент. При этом резко возрастают требуемый объем памяти и количество вычислений.<br />
Пр<strong>им</strong>енение БПФ-П позволяет избежать указанных недостатков. Аналогичное пр<strong>им</strong>енение БПФ – П для<br />
решения задач цифровой фильтрации, интерполяции и моделирования дискретных сигналов позволяет<br />
сократить время обработки и требуемый объем памяти по сравнению с существующ<strong>им</strong>и методами.<br />
Л И Т Е Р А Т У Р А<br />
1. Пономарев В.А. Структура системы дискретных экспоненциальных функций//Автометрия, А<strong>Н</strong>СССР СО – 1986.-№1.с.14-<br />
20.<br />
2. Пономарев В.А. Стохастические свойства параметрического дискретного преобразования Фурье//Радиоэлектроника и<br />
электроника// А<strong>Н</strong> СССР.-1983-Т.28.-№ 8.- Стр.1590-1595<br />
3. Пономарев В.А., Пономарева О.В. Модификация дискретного преобразования Фурье для решения задач интерполяции и<br />
свертки функций // Радиоэлектроника и электроника. А<strong>Н</strong> СССР.-1984.-Т.29.-№8.-Стр. 1561-1570.<br />
4. Пономарева О.В. Развитие теории спектрального анализа дискретных сигналов на конечных интервалах в базисе параметрических<br />
дискретных экспоненциальных функций. М.: Цифровая обработка сигналов.-2010г.-№ 2.- с.7-12<br />
УДК 621.372<br />
А.В.Пономарев, О.В. Пономарева<br />
ОС<strong>Н</strong>ОВЫ ПАРАМЕТРИЧЕСКОГО ДИСКРЕТ<strong>Н</strong>ОГО ПРЕОБРАЗОВА<strong>Н</strong>ИЯ ФУРЬЕ<br />
Ижевский государственный технический университет<br />
Россия, г. Ижевск, пл. 50 лет октября,15<br />
Тел.: (3412) 68-25-28, +7-912-856-59-67; факс: (3412) 68-29-79<br />
E-mail: cikur@udmnet.ru<br />
В докладе введено параметрическое дискретное преобразование Фурье (ДПФ-П), исследованы его свойства на основе анализа<br />
видоизменения базисной системы ДЭФ при разложении дискретных сигналов, дополненных нулевыми отчетами во<br />
временной или частотной области.<br />
299
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Среди известных методов цифровой обработки сигналов спектральный анализ по системе дискретных<br />
экспоненциональных функций (ДЭФ) занял важное место в различных областях научных исследований<br />
[1]. Отмет<strong>им</strong>, что при спектральном анализе дискретных сигналов часто пр<strong>им</strong>еняется искусственное увеличение<br />
интервала определения за счет добавления нулевых отсчетов либо во временной области, или в<br />
частотной. В работе [2] рассмотрено видоизменение базисных систем функций Виленкина – Крестенсона<br />
n<br />
(ВКФ) для дискретных сигналов, заданных на интервалах N = m , ( n = l + k,<br />
l,<br />
k - целые числа; m-<br />
основание системы счисления), подвергшихся такому преобразованию. Для ДЭФ полученные результаты<br />
не могут быть пр<strong>им</strong>енены, так как они, как справедливо отмечено в [2], теряют смысл при m = N .<br />
Дискретный сигнал x(n), n = 0,<br />
N −1, представленный в виде вектора<br />
X [ ] T<br />
N = x( 0), x(1),.....<br />
x(<br />
N −1)<br />
N-мерного линейного пространства, может быть разложен по ортогональному<br />
дискретному базису Фурье:<br />
S N = ( 1 N ) FN<br />
X N . (1)<br />
Дискретную функцию x(n), n = 0,<br />
N −1, дополн<strong>им</strong> N ( r − 1) r нулями, M = Nr,<br />
r - целое число.<br />
Представ<strong>им</strong> такую дискретную функцию в виде вектора X M,θ :<br />
T<br />
⎡<br />
⎤<br />
X M , = ⎢x(0),<br />
x(1),.....<br />
x(<br />
N −1),<br />
0,...,0 ⎥ . Вычисление ДПФ X<br />
θ M , θ , согласно (1), равносильно усечению<br />
⎢<br />
123 ⎥<br />
⎣<br />
N ( r−1)<br />
r⎦<br />
N ( r − 1) r столбцов матрицы F Nr , т.е. превращению ее из квадратной в прямоугольную C M × N . Пр<strong>им</strong>енив<br />
к множеству строк матрицы C M × N отношение сравн<strong>им</strong>ости по модулю r и используя полученное разбиение,<br />
представ<strong>им</strong> матрицу C M × N в виде r квадратных матриц F N , θ , размерность каждой из которых N, а<br />
номера элементов строк являются классами вычетов по модулю r. Строки матриц F θ,N являются функциями<br />
вида:<br />
( m+<br />
) ⎡<br />
⎤<br />
W<br />
θ l 2π<br />
N = exp⎢−<br />
j ( m + θ ) l⎥<br />
⎣ N<br />
; m , l = 0, N − 1 ,<br />
⎦<br />
которые назовем параметрическ<strong>им</strong>и дискретными экспоненциальными функциями (ДЭФ-П).<br />
Основные свойства ДПФ-П.<br />
1. ДЭФ-П в отличие от ДЭФ не являются функциями двух равноправных переменных p и l.<br />
2. ДЭФ-П являются периодическ<strong>им</strong>и по переменной p и параметрически периодическ<strong>им</strong>и по переменной l<br />
с периодом N:<br />
def p ± kN,<br />
l,<br />
θ = def p,<br />
l,<br />
θ ,<br />
p<br />
( ) p ( )<br />
± θ N<br />
( p,<br />
l ± kN,<br />
θ ) = def ( p,<br />
l,<br />
θ ) W<br />
k<br />
.<br />
def p<br />
p<br />
N<br />
3. Система ДЭФ-П не мультипликативна по переменной p:<br />
def p p, l,<br />
θ def p m,<br />
l,<br />
θ ≠ def p p + m,<br />
l,<br />
θ<br />
и мультипликативна по переменной l:<br />
( ) ( ) ( ) ;<br />
( p, l,<br />
θ ) def ( p,<br />
m,<br />
θ ) = def ( p,<br />
l + m,<br />
θ ),<br />
m = 0, N −1<br />
def p<br />
p<br />
p<br />
4. Среднее значение ДЭФ-П по переменной p равно нулю при<br />
N 1<br />
l ≠ 0 ,<br />
⎛ 2π<br />
⎞1−<br />
exp( −j2π<br />
l)<br />
∑ − defp<br />
( p,<br />
l,<br />
θ)<br />
= exp⎜<br />
− j θ l⎟<br />
, а по переменной l не равно нулю:<br />
N<br />
2π<br />
p=<br />
0 ⎝ ⎠<br />
1−<br />
exp( − j l)<br />
N<br />
[ − j2π<br />
l(<br />
p + θ)<br />
]<br />
N 1<br />
1−<br />
exp<br />
∑ − defp<br />
( p,<br />
l,<br />
θ)<br />
=<br />
2π<br />
p=<br />
0 1−<br />
exp( − j ( p + θ))<br />
N<br />
5. Система ДЭФ-П ортогональна по обе<strong>им</strong> переменным:<br />
N −1<br />
∑<br />
l=<br />
0<br />
W<br />
( p+<br />
θ ) l<br />
N<br />
−(<br />
m−<br />
p)<br />
N<br />
( m+<br />
θ ) l * 1−WN<br />
[ W ] =<br />
== { N при p = m;<br />
0 при p ≠ m;<br />
N<br />
1−W<br />
−(<br />
m−<br />
p)<br />
N<br />
300
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
N −1<br />
∑<br />
( p+<br />
θ ) l<br />
−(<br />
k−l)<br />
N<br />
( p+<br />
θ ) k * −θ<br />
( k−l)<br />
1−WN<br />
[ W ] = W<br />
= { N при k = l;<br />
0 при k ≠ l;<br />
WN<br />
N<br />
N<br />
−(<br />
k−l)<br />
l=<br />
0<br />
1−WN<br />
Разложение по базисной системе ДЭФ-П задает прямое параметрическое дискретное преобразование<br />
Фурье (ДПФ-П).<br />
S<br />
N , θ<br />
= ( 1 N ) FN<br />
, θ<br />
X<br />
N<br />
, 0 ≤ θ < 1; (2)<br />
Существует и обратное ДПФ-П:<br />
*<br />
X = F S<br />
(3)<br />
N<br />
N , θ N ,θ<br />
Используя метод собственных преобразований [3], можно показать, что ДПФ-П является собственным<br />
преобразованием параметрической циркулянтной матрицы<br />
T T<br />
T N −1<br />
[ X , X M ,..., X M ] T<br />
C<br />
где M k θ , k = 1, N −1<br />
-матрица, осуществляющая параметрический сдвиг вектора X<br />
N<br />
на k элементов:<br />
⎡ 0 1 . . 0⎤<br />
⎡ 0 0 1 . 0⎤<br />
⎢<br />
⎢<br />
⎥<br />
⎢ . 0 1 . 0 ⎢ . 0 . . . ⎥<br />
⎢<br />
2<br />
M θ = . . . . . , M = ⎢ . . . . 1⎥<br />
и т.д.<br />
θ<br />
⎢<br />
⎢ 0 . . . 1<br />
⎢ 2<br />
. . . 0<br />
⎥ ⎥⎥⎥⎥⎥ ⎢<br />
⎥<br />
− j2πθ<br />
⎢e<br />
0 . . . ⎥<br />
− j πθ<br />
⎣e<br />
⎢<br />
− j2πθ<br />
⎥<br />
⎦ ⎣ 0 e . . 0⎦<br />
Теорема. ДПФ-П является собственным преобразованием параметрической циркулянтной матрицы:<br />
−1<br />
*<br />
F N , θ Cθ<br />
FN<br />
, θ = diagS N , θ .<br />
Следствие 1.<br />
−1<br />
*<br />
ДПФ является собственным преобразованием циркулянтной матрицы С 0 : F N C0FN<br />
= diagS N .<br />
Это следует из того, что при θ = 0 ДПФ-П является стандартным ДПФ, а параметрическая циркулянтная<br />
матрица описывает циклический сдвиг последовательности x ( n),<br />
n = 0, N −1.<br />
θ = N N θ N θ ,<br />
Следствие 2.<br />
Энергетический спектр параметрической N - периодической последовательности инвариантен ее временному<br />
сдвигу:<br />
где S [ s(0,<br />
θ ), s(1,<br />
θ ),....., s( ( N 1 θ )] T<br />
2<br />
N , θ<br />
N SN<br />
, θ<br />
,<br />
G =<br />
N , θ = − ), - коэффициенты ДПФ-П параметрической N -<br />
периодической последовательности<br />
θ N ent[ n N ]<br />
xθ ( n)<br />
= x(<br />
n mod N)<br />
W N .<br />
Здесь ent [.] – с<strong>им</strong>вол взятия целой части. В частном случае при θ = 1 приход<strong>им</strong> к понятию N – антипериодической<br />
2<br />
решетчатой функции x ( n + N)<br />
= −x<br />
(<br />
).<br />
1 1 n<br />
2<br />
2<br />
Так<strong>им</strong> образом, ДПФ-П позволяет расширить понятие периодичности, из которого N – периодичность<br />
(круговая перестановка внутри интервала 0,<br />
N −1) следует как частный случай.<br />
Для ДПФ-П справедливы теоремы линейности, сдвига, корреляции и теорема Парсеваля.<br />
Пр<strong>им</strong>енение метода ДПФ в задачах цифровой обработки сигналов существенно ограничивается изза<br />
целого ряда характерных для него эффектов. <strong>Н</strong>апр<strong>им</strong>ер, эффект паразитной амплитудной модуляции<br />
спектра [2]. Пр<strong>им</strong>енение базиса ДЭФ-П позволяет устранить этот эффект, используя вариацию параметра<br />
θ в ДПФ-П.<br />
Полученные результаты могут быть использованы при анализе случайных процессов со скрытыми<br />
периодичностями, где частоты скрытых периодичностей являются информативными признаками. <strong>Н</strong>апр<strong>им</strong>ер,<br />
в задачах пассивной гидролокации, виброакустической диагностике машин.<br />
<strong>Н</strong>а рисунках 1,2 представлены спектры шумов редуктора судового двигателя.<br />
301
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
6<br />
8<br />
q=0<br />
7<br />
5<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
q=1/2<br />
квадрат модуля, дБ<br />
4<br />
3<br />
2<br />
1<br />
квадрат модуля, дБ<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
0 0.2 0.4 0.6<br />
нормированная частота<br />
Рис.1 Спектр сигнала, метод ДПФ<br />
0<br />
0 0.2 0.4 0.6<br />
нормированная частота<br />
Рис.2 Спектр сигнала, метод ДПФ-П<br />
При построении быстрых алгоритмов вычисления ДПФ-П (алгоритмов БПФ-П) для реализации<br />
прямого преобразования ДПФ-П, пр<strong>им</strong>ен<strong>им</strong> метод прореживания по времени, а при обратном преобразовании<br />
– прореживание по частоте.<br />
Использование ДПФ-П позволяет, во-первых, сократить время обработки и требуемый объем памяти,<br />
во-вторых, при спектральном анализе параметрических N-периодических решетчатых функций рассматривать<br />
динамические задачи в квазистатическом аспекте, в-третьих, повысить точность оценивания<br />
частоты периодических компонентов.<br />
Л И Т Е Р А Т У Р А<br />
1. Айфичер, Эммануил С., Джервис, Барри У. Цифровая обработка сигналов: практический подход, 2-е издание: Пер. с англ. –<br />
М.: Издательский дом «Вильямс», 2004.-992с.<br />
2. Трахтман А.М., Трахтман В.А. Основы теории дискретных сигналов на конечных интервалах. М.: «Сов.Радио», 1975.-208с.<br />
3. Пономарев В.А., Пономарева О.В. Модификация дискретного преобразования Фурье для решения задач интерполяции и<br />
свертки функций // Радиотехника и электроника. А<strong>Н</strong> СССР.-1984.-Т.29.-№ 8.-Стр.1561-1570.<br />
УДК 621.372<br />
О.В. Пономарева<br />
ОД<strong>Н</strong>ОБИ<strong>Н</strong>ОВОЕ ПАРАМЕТРИЧЕСКОЕ ДПФ В ЗАДАЧАХ ОБ<strong>Н</strong>АРУЖЕ<strong>Н</strong>ИЯ И<br />
ИЗМЕРЕ<strong>Н</strong>ИЯ ПАРАМЕТРОВ ТО<strong>Н</strong>АЛЬ<strong>Н</strong>ЫХ КОМПО<strong>Н</strong>Е<strong>Н</strong>Т<br />
Ижевский государственный технический университет<br />
Россия, г. Ижевск, пл. 50 лет октября,15<br />
Тел.: (3412) 68-25-28, +7-912-856-59-67; факс: (3412) 68-29-79; E-mail: cikur@udmnet.ru<br />
Рассмотрено обобщение алгоритма однобинового СДПФ в виде скользящего однобинового параметрического ДПФ<br />
(СДПФ-П), которое в отличие от стандартного СДПФ позволяет проводить оценку спектра не на фиксированных частотах,<br />
а из набора частот, число которых варьируется θ параметром и предлагаемый алгоритм обеспечивает полный<br />
контроль над резонансной частотой фильтра.<br />
При цифровой обработке сигналов в различных областях научных исследований часто приходится<br />
сталкиваться с задачами обнаружения и измерения параметров отдельных тональных компонент (задачи<br />
анализа случайных процессов со скрытыми периодичностями). <strong>Н</strong>апр<strong>им</strong>ер, в пассивной гидролокации при<br />
обнаружении и классификации кораблей, главным образом, используется структура тональных компонент<br />
(тональные компоненты в спектрах возникают за счет работы механизмов судна). При виброакустической<br />
диагностике машин используется тот факт, что акустические сигналы машин и механизмов характеризуются<br />
наличием гармонических рядов разнообразной природы. Так в вибрационном или шумовом сигнале<br />
редуктора можно выделить ряды из гармоник оборотной, зубцовой и модуляционных частот [1].<br />
Метод ДПФ, реализуемый в форме алгоритма БПФ, является стандартным методом определения<br />
спектра сигнала. Однако, как отмечено выше, есть приложения, где необход<strong>им</strong>о находить не все отсчеты<br />
спектра, а только их часть. Эффективным методом вычисления «прореженных» отсчетов спектра является<br />
алгоритм Герцеля, который позволяет задавать любую резонансную частоту фильтра в диапазоне от 0 до<br />
302
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
2 , k = 0,<br />
N 2 −1<br />
, N- число<br />
отсчетов сигнала.<br />
<strong>Н</strong>едостатком метода является <strong>им</strong>енно фиксированность набора возможных частот, что существенно<br />
ограничивает его пр<strong>им</strong>енение на практике.<br />
N 2 −1 и представляет собой БИХ-фильтр второго порядка с двумя действительными коэффициентами<br />
обратной связи и одн<strong>им</strong> комплексным коэффициентом в цепи прямой связи [2].<br />
В [3] предложен алгоритм однобинового скользящего ДПФ (СДПФ), который выдает значения отсчетов<br />
спектра с той же частотой, с какой приходят входные отсчеты сигнала и более эффективен (с точки<br />
зрения вычислений), чем алгоритм Герцеля. Алгоритм СДПФ является КИХ-фильтром и позволяет находить<br />
частоты (или подмножество частот) из фиксированного набора { π k N}<br />
Предлагаемый алгоритм СДПФ-П вычисляет значения спектра N ( k,<br />
θ ) на ( k + θ ) частоте по отсчетам<br />
входного сигнала x ( n + r)<br />
, n = 0,<br />
N −1, из скользящего окна длиной в N отсчетов, при сдвиге сигнала<br />
в окне на r отсчетов влево:<br />
где W<br />
S<br />
( r)<br />
N<br />
N<br />
∑ − 1<br />
n=<br />
0<br />
⎡ 2π<br />
⎤<br />
= exp⎢−<br />
j ( k + θ n⎥ , n , k = 0, N −1;<br />
⎣ N ⎦<br />
( k+<br />
θ ) n<br />
N )<br />
r = 0,1,2…; 0 ≤ θ < 1.<br />
Так<strong>им</strong> образом при r = 0:<br />
а при r = 1:<br />
Введя переменную m = n + 1<br />
S<br />
S<br />
( k+<br />
θ ) n<br />
N<br />
( )<br />
S r<br />
( k,<br />
θ ) = x(<br />
n + r)<br />
W , (1)<br />
N<br />
∑ − 1<br />
(0)<br />
( k+<br />
θ ) n<br />
N ( k,<br />
) = x(<br />
n)<br />
W N<br />
n=<br />
0<br />
θ (2)<br />
N<br />
∑ − 1<br />
(1)<br />
( k+<br />
θ ) n<br />
N ( k,<br />
) = x(<br />
n + 1) W N<br />
n=<br />
0<br />
θ . (3)<br />
выражение (3) преобразуется к виду:<br />
S<br />
N<br />
(1)<br />
( k + θ )( m−1)<br />
N ( k,<br />
) = ∑ x(<br />
m)<br />
W N<br />
m=<br />
1<br />
θ . (4)<br />
Изменив пределы суммирования в (4) и проведя для компенсации изменения пределов суммирования<br />
вычитание члена с m=0 и члена с m=N получ<strong>им</strong>:<br />
S<br />
(1)<br />
N<br />
N −1<br />
( k+<br />
θ ) m −(<br />
k+<br />
θ )<br />
−(<br />
k+<br />
θ )<br />
( k+<br />
θ )( N −1)<br />
( k,<br />
θ ) = ∑ x(<br />
m)<br />
WN<br />
WN<br />
− x(0)<br />
WN<br />
+ x(<br />
N)<br />
WN<br />
или<br />
m=<br />
0<br />
⎪⎧<br />
⎡<br />
N −1<br />
⎤<br />
⎪⎫<br />
(1)<br />
−(<br />
k+<br />
θ )<br />
( k+<br />
θ ) m<br />
( k+<br />
θ ) N<br />
S N ( k,<br />
θ ) = WN<br />
⎨⎢∑<br />
x(<br />
m)<br />
W ⎥ − x(0)<br />
+ x(<br />
N)<br />
WN<br />
⎬ .<br />
⎪⎩ ⎢⎣<br />
m=<br />
0<br />
⎥⎦<br />
⎪⎭<br />
( + θ ) N N<br />
Так как = W θ = exp( − j2πθ)<br />
окончательно получ<strong>им</strong>:<br />
k<br />
W N<br />
S<br />
N<br />
(1)<br />
N<br />
(<br />
k,<br />
θ ) = W<br />
−(<br />
k+<br />
θ )<br />
N<br />
(0)<br />
[ S ( k,<br />
θ ) − x(0)<br />
+ x(<br />
N)exp(<br />
− j2πθ)<br />
]<br />
N<br />
. (5)<br />
Реализация параметрического СДПФ-П согласно соотношения (5) в виде КИХ - фильтра приведена на рисунке<br />
1.<br />
303
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
x(n)<br />
exp( − j2πθ)<br />
S r N<br />
( k,<br />
θ )<br />
−( k + θ )<br />
N<br />
W<br />
Z − N<br />
−1<br />
−1<br />
Z<br />
Рис.1. Структура КИХ - фильтра, реализующая СПДФ-П на k-ой частоте, при 0 ≤ θ < 1<br />
z -q - задержка на q отсчетов<br />
При θ=0 СДПФ-П переходит в стандартное СДПФ, а при θ=1/2 структура КИХ фильтра может быть упрощена<br />
(рис.2):<br />
Дад<strong>им</strong> краткие пояснения о сути закономерностей, лежащих в основе параметрического СДПФ (в<br />
( θ )<br />
том числе и стандартного СДПФ). Множитель W − k +<br />
N<br />
осуществляет сдвиг на один отсчет базисной<br />
функций ДПФ-П (не сигнала).<br />
(1)<br />
При этом оказывается возможным не находить вновь все значения проекции S N ( k,<br />
θ ) сдвинутого<br />
на один отсчет влево исходного сигнала на базисную функцию:<br />
(1)<br />
N<br />
0<br />
N<br />
k<br />
k(<br />
N −1)<br />
N<br />
S ( k,<br />
θ ) = x(1)<br />
W + x(2)<br />
WN<br />
+ ... x(<br />
N)<br />
W . Отсчеты 2,<br />
N − 2 S N ( k,<br />
θ ) могут быть получены из предыдущего<br />
значения S N<br />
(0)<br />
(1)<br />
( k,<br />
θ ) . Для определении ( k,<br />
θ ) необход<strong>им</strong>о лишь вычислить два значения проек-<br />
−(<br />
k+θ<br />
)<br />
ции сигнала на базисную функцию: первый член суммы [ − (0) W N<br />
]<br />
−(<br />
k+<br />
θ )<br />
(0) −(<br />
k+ θ )<br />
мы [ x ( N)exp.(<br />
− j2πθ)<br />
] сложить с S ( k,<br />
θ ) W .<br />
W N<br />
−x( n − N)<br />
N<br />
S N<br />
(1)<br />
( 1)<br />
S r −<br />
N<br />
( k,<br />
θ )<br />
x вычесть, а второй член сум-<br />
−1<br />
x(n)<br />
−x(n)<br />
S r N (k,1/ 2)<br />
−( k +1/<br />
W N<br />
N<br />
Z − −1<br />
2)<br />
Z<br />
−x( n − N)<br />
Рис.2. Структура КИХ - фильтра, реализующая СПДФ-П на k-ой частоте, при θ = ½.<br />
( 1)<br />
S r −<br />
N<br />
Оцен<strong>им</strong> вычислительные затраты при реализации СДПФ-П. Учитывая, что одно комплексное умножение<br />
состоит из двух действительных сложений и четырех действительных умножений, а одно комплексное<br />
сложение требует двух действительных сложений и прин<strong>им</strong>ая во вн<strong>им</strong>ание число операций необход<strong>им</strong>ых<br />
при выполнении ДПФ, алгоритма Герцеля и стандартного СДПФ [2], сравн<strong>им</strong> предлагаемый<br />
метод с существующ<strong>им</strong>и методами (таблица 1).<br />
( k,1/<br />
2)<br />
304
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Метод<br />
Алгоритм<br />
ДПФ<br />
Алгоритм<br />
Герцеля<br />
Скользящее<br />
ДПФ-П<br />
θ = 0,1 2<br />
Скользящее<br />
ДПФ-П<br />
θ ≠ 0,1 2<br />
Число операций необход<strong>им</strong>ых для выхода<br />
( 1)<br />
на установившийся реж<strong>им</strong> S N −<br />
( k,<br />
θ )<br />
Действительные<br />
умножения<br />
N<br />
Действительные<br />
сложения<br />
Вычисление следующего значения<br />
N ( k,<br />
θ )<br />
Действительные<br />
умножения<br />
Таблица 1<br />
В развитие работ Л.<strong>Н</strong>.Захарова и В.А.Гордиенко выполняется сравнение точности пеленгования низкочастотного источника<br />
с использованием группы пространственно разнесенных скалярных приемников и одиночного векторно-скалярного<br />
приемника.. Показано, что, несмотря на вариацию условий распространения: изменение глубины волновода в районе перемещения<br />
излучателя и вдоль трассы распространения звуковых сигналов, достигается высокая точность пеленгования (не<br />
менее 1,5º-2º) на дальностях до 12 км. Показано, что по акустическ<strong>им</strong> сигналам с использованием матрицы поворота<br />
можно уточнять ориентацию осей векторных каналов. Точность пеленгования подтверждается сравнением экспер<strong>им</strong>ентальных<br />
данных, полученных по акустическ<strong>им</strong> полям, с показаниями двух спутниковых систем навигации (GPS), расположенных<br />
на приемном и излучающем судне. Отмечается пре<strong>им</strong>ущество малогабаритных ВСМ по сравнению со скалярными<br />
протяженными антеннами.<br />
Целью данного экспер<strong>им</strong>ентального исследования является сравнение точности пеленгования широкополосного<br />
низкочастотного источника группой разнесенных в пространстве скалярных приемников<br />
(СП) и одиночным четырехкомпонентным малогабаритным векторно-скалярным модулем (ВСМ). Выясняется<br />
также влияние пространственной неоднородности мелководного волновода на точность пеленгования<br />
группой СП или ВСМ. Экспер<strong>им</strong>енты проводились в сложных гидрологических условиях – при нали-<br />
305<br />
( )<br />
S N<br />
Действительные<br />
сложения<br />
4N 4N 4N 4N<br />
N+2 2N+1 N+2 2N+1<br />
4N 4N 4 4<br />
4N 4N 6 5<br />
В заключении отмет<strong>им</strong> следующие пре<strong>им</strong>ущества предлагаемого скользящего однобинового параметрического<br />
дискретного преобразования Фурье:<br />
- N может быть произвольным положительным числом, а не только целой степенью двух;<br />
- не требуется накопления данных до начала вычислений;<br />
- алгоритм не требует двоично-инверсной перестановки данных;<br />
- после получения установившегося значения количество операций не зависит от N (таблица 1);<br />
- при тех же пре<strong>им</strong>уществах, что и алгоритм Герцеля, предлагаемый алгоритм однобинового<br />
СДПФ-П требует существенно меньших вычислений.<br />
Важным пре<strong>им</strong>уществом предлагаемого однобинового СДПФ-П перед стандартным однобиновым<br />
СДПФ является то, что данный алгоритм как и алгоритм Герцеля позволяет задавать любую резонансную<br />
частоту фильтра (переменная (k+θ) может быть любой в диапазоне от 0 до ( N 2 −1)<br />
), но в отличие от алгоритма<br />
Герцеля требует существенно меньших вычислительных затрат.<br />
Л И Т Е Р А Т У Р А<br />
1. Оппенгейм Э. Пр<strong>им</strong>енение цифровой обработки сигналов. М.: Мир, 1980<br />
2. Рабинер Л., Голд Б. Теория и пр<strong>им</strong>енение цифровой обработки сигналов. М.: Мир, 1978<br />
3. Лайонс Р. Цифровая обработка сигналов: Второе издание. Пер. с англ.-М.: ООО «Бином-Пресс», 2007 г.-656 с.<br />
4. Пономарева О.В. Развитие теории спектрального анализа дискретных сигналов на конечных интервалах в базисе параметрических<br />
дискретных экспоненциальных функций. М.: Цифровая обработка сигналов.-2010г.-№ 2.- с.7-12<br />
УДК 534.34<br />
Белова <strong>Н</strong>.И., Боровской П.А., Кузнецов Г.<strong>Н</strong>.<br />
ПЕЛЕ<strong>Н</strong>ГОВА<strong>Н</strong>ИЕ БУКСИРУЕМОГО ИСТОЧ<strong>Н</strong>ИКА С ИСПОЛЬЗОВА<strong>Н</strong>ИЕМ<br />
<strong>Н</strong>ИЗКОЧАСТОТ<strong>Н</strong>ОГО М<strong>Н</strong>ОГОКОМПО<strong>Н</strong>Е<strong>Н</strong>Т<strong>Н</strong>ОГО ВЕКТОР<strong>Н</strong>О-СКАЛЯР<strong>Н</strong>ОГО<br />
ПРИЕМ<strong>Н</strong>ИКА<br />
<strong>Н</strong>аучный центр волновых исследований ИОФ РА<strong>Н</strong><br />
Россия, 117942 Москва, ул. Вавилова, д. 38<br />
Тел.: (499) 256-1790; E-mail: skbmortex@mail.ru
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
чии сильных подводных приливно-отливных течений, что приводило к изменению наклона вертикальной<br />
оси ВСМ.<br />
Предварительно с использованием излучающего и приемного судов с установленными на борту<br />
приемниками спутниковой навигации GPS и буксируемым <strong>им</strong>пульсным высочастотным излучателем было<br />
выполнено позиционирование всех приемных модулей. Поэтому геометрия расположения приемных модулей<br />
друг относительно друга и ориентация апертуры относительно системы координат была известна с<br />
высокой точностью (с погрешностью не более 1м).<br />
В качестве низкочастотного излучателя использовался буксируемый пневмоисточник, абсолютные<br />
координаты которого во время экспер<strong>им</strong>ента контролировались с использованием GPS. Прием сигналов<br />
осуществлялся на четыре стационарных четырехкомпонентных ВСМ, включающих по одному СП и по<br />
три ортогональных векторных приемника (ВП). Расстояния между ВСМ2 и ВСМ3, а также ВСМ3 и ВСМ4<br />
были равными – по 50м. <strong>Н</strong>о ВСМ располагались не в линию, а с небольш<strong>им</strong> «изломом», который после<br />
позиционирования был измерен и при пеленговании учитывался. ВСМ2, ВСМ3 и ВСМ4 располагались на<br />
расстоянии около 1,2 м от дна. Приемники крепились на восьми эластичных растяжках внутри рамы, которая<br />
была установлена на тяжелом основании с использованием двух цанговых подвесов. Рама размещалась<br />
в звукопрозрачном обтекателе и ориентировалась с использованием плавучести в положении оси Z,<br />
близком к вертикальному. Такое крепление приемников фиксировало после морской постановки оси X и<br />
Y, но допускало при сильном течении отклонение оси Z от вертикали. Фотографии ВСМ и рамы с установленными<br />
ВСМ представлены на рис. 1 и рис.2. Диаметр низкочастотного четырехкомпонентного ВСМ<br />
- 21 см. Плавучесть нейтральная. Рабочий диапазон каждого канала ВСМ от 5 до 1500Гц.<br />
Глубина моря в месте постановки ВСМ была постоянной и составляла по данным эхолота 53м.<br />
Приемное судно стояло на якорях на расстоянии около 400 м от ближайшего приемного модуля. Пневмоисточник,<br />
спектр которого в точке излучения представлен на рис. 3, буксировался на глубине 15 м, перемещаясь<br />
относительно апертуры с разнесенными ВСМ по дуге с радиусом 11-12 км. <strong>Н</strong>ачало дуги располагалось<br />
пр<strong>им</strong>ерно по нормали к апертуре приемной системы, окончание – параллельно апертуре. Временные<br />
реализации сигналов от пневмоисточника, излученных в начале и в конце дуги, принятые скалярным<br />
приемником ВСМ, представлены на рис. 4. Излучение <strong>им</strong>пульсов вдоль трассы буксировки пневмоисточника<br />
осуществлялось с периодом 1 минута. Амплитуда излучаемого <strong>им</strong>пульса на расстоянии 1м<br />
около 4атм. Давление внутри пневмоисточника 100 атм.<br />
Рис.1. Измерительный четырехкомпонентный<br />
ВСМ (рабочие<br />
частоты 5-1500 Гц)<br />
Рис. 2. Рама с низкочастотным<br />
ВСМ(5-1500 Гц) и высокочастотным<br />
ВСМ (1-10кГц)<br />
Рис.3. Спектр сигнала, излучаемого<br />
пневмоисточником.<br />
Экспер<strong>им</strong>енты проводились в общей для приемного и излучающего судов в едином времени.<br />
Рельеф дна моря исследовался с использованием эхолота и отличался значительной неоднородностью. В<br />
начале трассы буксировки глубина моря составляла 34 м, проходила через зону глубиной 59 м, а в конце<br />
дуги на почти километровом участке глубина была постоянной 53 м. Волновод вдоль трасс распространения<br />
<strong>им</strong>пульсов был разноглубинным, кроме участка в конце дуги. В этой зоне глубина была одинаковой в<br />
точках излучения и приема и постоянной вдоль трассы. Видно, что сигналы, принятые с разных направлений,<br />
различаются как по форме, так и по амплитуде. Это объясняется различием рельефа дна вдоль разных<br />
направлений от приемных модулей. Малая глубина моря в начале дуги привела к подавлению низких<br />
частот в спектре принятого сигнала (рис.4а). При излучении с большой глубины и распространении вдоль<br />
трассы с постоянной глубиной низкочастотные моды сохраняются (рис.4б).<br />
306
XXIV сессия Российского акустического общества,<br />
Гидроакустика<br />
Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Рис.4. Сигналы, зарегистрированные скалярным приемником ВСМ: а) – начало дуги, б) – конец дуги.<br />
Выполн<strong>им</strong> оценку пеленга на пневмоисточник с использованием трех разнесенных СП и одного<br />
ВСМ. Введем правостороннюю систему декартовых координат – так что ось X проходит через второй и<br />
четвертый модуль, а начало координат совпадает с ВСМ2. Ось Y направлена в сторону излучающего судна,<br />
ось Z направлена вверх. Пеленг на пневмоисточник по разнесенным СП вычисляется после вза<strong>им</strong>но<br />
корреляционной обработки, которая дает временные задержки между широкополосными сигналами, принятыми<br />
СП2, СП3 и СП4. При расположении приемников в углах равнобедренного треугольника для положительных<br />
значений временных задержек направление на источник можно вычислить двумя путями:<br />
θ = arcsin( ( t24<br />
⋅ cs / 2 − t34<br />
⋅ cs)<br />
/ y3)<br />
(а) или θ = arccos( t24<br />
⋅ cs / x4)<br />
(б), где cs – измеренная<br />
экспер<strong>им</strong>ентально скорость звука, равная 1470м/с, t24 – временная задержка между вторым и четвертым<br />
приемником, t34 – между треть<strong>им</strong> и четвертым, y3 – координата Y третьего приемника в выбранной<br />
системе координат, x4 – координата X четвертого приемника. <strong>Н</strong>а рис.5 видно, что пеленга, рассчитаныe<br />
по обе<strong>им</strong> формулам, совпадают.<br />
Завис<strong>им</strong>ость пеленга на буксируемый источник с использованием одиночного ВСМ вычисляется<br />
по формуле:<br />
pVy<br />
θ = arctg , где в числителе и знаменателе представлены усредненные по частоте проекции<br />
вектора потока мощности. Результаты расчетов с использованием СП и ВСМ приведены на рис.5 и<br />
pVx<br />
6. Установлено, что завис<strong>им</strong>ости пеленга на буксируемый пневмоисточник, вычисленные по разным парам<br />
СП, практически совпадают и хорошо согласуются с оценками пеленга, полученными по двум установленным<br />
на суднах навигационным приборам (отклонения средних величин не более 1,5º).<br />
Рис.5. Завис<strong>им</strong>ости пеленга на источник от времени,<br />
вычисленные с использованием сигналов от СП.<br />
Сплошная линия рассчитана по формуле б) для модулей<br />
4-2, пунктирная линия рассчитана по формуле<br />
а) для модулей 4-3.<br />
307<br />
Рис.6. Изменения пеленга от ВСМ на буксируемый<br />
источник. Сплошная кривая не учитывает знаков<br />
фазы X, Y компонент вектора потока мощности.<br />
Пунктирная кривая соответствует пеленгам, полученным<br />
по разнесенным СП.<br />
<strong>Н</strong>а рис. 6 компоненты Vx и Vy усредняются в диапазоне частот 100-300Гц. Отмет<strong>им</strong>, что на рис.6 зона<br />
макс<strong>им</strong>ума кривой пеленга на источник соответствует изменению разности фаз ϕ<br />
px<br />
− ϕ<br />
py<br />
на π . В этой<br />
же области происходит смена знака фазы вза<strong>им</strong>ного спектра между давлением и Vx с минуса на плюс.<br />
Функция arctg ( x)<br />
= θ + kπ<br />
, как известно, не дает однозначной оценки. Для получения однозначного<br />
значения пеленга учтем, что по схеме экспер<strong>им</strong>ента источник движется из второго квандранта в первый<br />
относительно системы координат приемников. Точное выражение для угла при отрицательном значении<br />
p<br />
f<br />
⋅V<br />
yf<br />
⋅ exp( j ⋅ ( ϕ<br />
Vy<br />
− ϕ<br />
p<br />
))<br />
отношения<br />
равно − θ + π , где<br />
pVy<br />
θ = arctg .<br />
p<br />
f<br />
⋅V<br />
xf<br />
⋅ exp( j ⋅ ( ϕ<br />
Vx<br />
− ϕ ))<br />
pVx<br />
<strong>Н</strong>а рис.7 представлены оценки пеленга на пневмоисточник, вычисленные для усредненных модулей вза<strong>им</strong>ных<br />
спектров сигнала с учетом вариации скачка фазы. Кроме того, учтены точные значения пеленгов,
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
полученные с использованием двух GPS и завис<strong>им</strong>ости пеленга от времени, вычисленные по задержкам<br />
сигналов, принятых СП. Из сравнения значения пеленгов, полученных различными способами, следует,<br />
что одиночный ВСМ при морской постановке был развернут в горизонтальной плоскости и отклонялся от<br />
вертикали. Используя матрицу поворота, получ<strong>им</strong> хорошее соответствие при повороте вертикальной компоненты<br />
на –21.5˚. относительно оси Z, на 16˚ относительно оси X, на –16.5˚ относительно оси Y. Результаты<br />
пересчета приведены на рис.7. Поскольку оси Vx и Vy ортогональны, то равенство углов, необход<strong>им</strong>ых<br />
для поворота компонентов Vx и Vy, качественно подтверждает достоверность гипотезы о необход<strong>им</strong>ости<br />
поворота Vx, Vy и Vz относительно осей системы координат.<br />
Средняя разница между значениями пеленгов, полученными после поворота осей разными методами,<br />
составляет -0,4˚., дисперсия оценок разностей около 1˚. Завис<strong>им</strong>ость разности фаз между давлением<br />
и Vx и Vy от времени до и после поворота осей приведена на рис.8.<br />
Рис.7. Завис<strong>им</strong>ость пеленга на источник,<br />
полученная после поворота<br />
ВСМ - сплошная кривая. Пунктирная<br />
кривая соответствует пеленгам, полученным<br />
по СП<br />
Рис.8. Завис<strong>им</strong>ость разности фаз между давлением и компонентами колебательной<br />
скорости от времени. Сплошная кривая – разность фаз между<br />
давлением и Vx. Пунктирная кривая - разность фаз между давлением и Vy.<br />
График а) получен до преобразования системы координат, график б) получен<br />
после поворота осей Vx, Vy и Vz.<br />
Из представленных результатов видно, что после разворота осей все значения пеленга, измеренные<br />
ВСМ, попадают в первый квадрант, и соответственно, меняется фаза Vx компоненты. Для независ<strong>им</strong>ой<br />
проверки точности позиционирования (оценки геометрии вза<strong>им</strong>ного расположения пространственно<br />
разнесенных ВСМ) и точности оценки пространственной ориентации осей ВСМ, полученных при первом<br />
экспер<strong>им</strong>енте, был выполнен дополнительный экспер<strong>им</strong>ент. Были зарегистрированы сигналы от пневмоисточника,<br />
буксируемого при движении излучающего судна от конца дуги в направлении на приемную<br />
систему. В ходе экспер<strong>им</strong>ента излучающее судно сначала приближалось к приемной системе под острым<br />
углом, затем удалялось под тупым углом, не пересекая ось Х. Расстояние между излучающ<strong>им</strong> судном и<br />
приемной системой изменялось больше, чем на порядок по сравнению с траверсным расстоянием.<br />
<strong>Н</strong>а рис.9 показаны значения пеленга и фазы Vx и Vy для той зоны, когда излучающее судно проходило<br />
вблизи ВСМ - значения пеленга представлены без учета вариации фазы и без поворота осей. Хорошо<br />
видно, что траектория движения пересекает сначала ось Y, потом ось X (последнего не должно<br />
быть). <strong>Н</strong>а рис.10 представлены результаты пересчета значений пеленга, полученные по данным ВСМ с<br />
учетом вариации фазы и после поворота осей ВСМ, выполненного с учетом вариации фазы.<br />
Приведенные на рис.7 и рис.10 результаты, полученные с использованием СП или ВСМ хорошо<br />
согласуются между собой и с данными спутниковой навигации. Для обеспечения такого «согласия» понадобилось<br />
уточнить по акустическ<strong>им</strong> сигналам ориентацию осей ВСМ относительно апертуры с разнесенными<br />
СП.<br />
Рис.9. Изменение пеленга от ВСМ на источник а); изменение<br />
фазы Vx-компоненты (маркер x) и Vy- компоненты<br />
(маркер +) б) при движении излучающего судна<br />
справа от приемного модуля<br />
Рис.10. Изменение пеленга на источник по сигналам от<br />
одиночного ВСМ и от разнесенных СП (сплошная кривая<br />
и пунктир): а) - с учетом вариации фазы, б) после<br />
поворота системы координат с учетом фазы.<br />
308
XXIV сессия Российского акустического общества, Сессия <strong>Н</strong>аучного совета по акустике РА<strong>Н</strong><br />
Гидроакустика<br />
Полученные результаты подтверждают возможность высокоточного пеленгования широкополосного<br />
<strong>им</strong>пульсного источника как с использованием разнесенных в пространстве СП, так и одиночным<br />
ВСМ. Для получения несмещенных пеленгов координаты СП должны предварительно измеряться с использованием<br />
алгоритмов позиционирования. Для ВСМ необход<strong>им</strong>о <strong>им</strong>еть встроенные датчики ориентации<br />
в вертикальной плоскости и высокоточный компас. Если эти датчики отсутствуют, то c использованием<br />
матрицы поворота возможна мин<strong>им</strong>изация невязки трех наблюдаемых экспер<strong>им</strong>ентально и вероятных<br />
истинных осей (X, Y и Z), характеризующих ориентацию ВСМ. Это ориентирует оси ВСМ и обеспечивает<br />
устойчивое высокоточное и непрерывное пеленгование источника.<br />
Иными словами для эффективного пр<strong>им</strong>енения ВСМ необход<strong>им</strong>о <strong>им</strong>еть данные не только по координатам<br />
их расположения в пространстве, но и определять ориентацию всех осей.<br />
Установлено, что высокая точность пеленгования широкополосных сигналов обеспечивается независ<strong>им</strong>о<br />
от расстояния и глубины волновода в зоне излучателя или вдоль трассы распространения. Данный<br />
результат является следствием использования достаточно высоких частот (100-300 Гц) и высоких мод<br />
колебаний, для которых значения групповых скоростей близки к скорости звука в воде.<br />
Следует отметить, что сопостав<strong>им</strong>ые точности пеленгования получены с использованием трех СП,<br />
разнесенных почти на 100м, и трех датчиков в составе одного ВСМ диаметром 21 см. Очевидно, что морская<br />
постановка и эксплуатация малогабаритного ВСМ много проще.<br />
309



