Del 2
Del 2
Del 2

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Övningar i Automationsteknik FK<br />
Tillståndsmodeller<br />
Hittills har vi bara behandlat system på in-utsignal form vare sig det är<br />
via differentialekvationer eller i form av överföringsfunktioner. För att mer<br />
fullständigtbeskrivavadsomhändermedsystemetanvändstillståndsvariabler.<br />
Dessa används i en beskrivning där beroendet mellan tidsderivatan för varje<br />
sådan tillståndsvariabel och alla tillståndsvariabler och insignaler beskrivs<br />
av en ekvation. Detta motsvarar ett system av n st första ordningens kopplade<br />
differentialekvationer där n är antalet tillstånd (tillståndsvariabler) oftast<br />
betecknade med x j (t),j = 1,2,...,n. Utsignalen (eller utsignalerna om<br />
det är MIMO-system) är en funktion av dessa tillstånd. Allmänt kan detta<br />
beskrivas med sambandet<br />
dx<br />
(t) = f(x(t),u(t),t)<br />
dt<br />
y(t) = g(x(t),u(t),t)<br />
där x(t) = (x 1 (t),x 2 (t),...,x n (t)), u(t) = (u 1 (t),u 2 (t),...,u m (t)) och y(t) =<br />
(y 1 (t),y 2 (t),...,y p (t)) och där f : R n ×R m ×R + → R n och g : R n ×R m ×<br />
R + → R p . Systemet är då ett system på tillståndsform av ordning n med m<br />
insignaler och p utsignaler.<br />
Situationen kan för linjära tidsinvarianta system beskrivas på matrisform<br />
enligt följande:<br />
(1)<br />
dx<br />
(t) = Ax(t)+Bu(t)<br />
dt<br />
y(t) = Cx(t)+Du(t)<br />
(2)<br />
där definitionerna blir något modifierade för att passa matrisformuleringen.<br />
Därförblirvektorernaomstöptatillkolonnmatriserenligtx(t) = (x 1 (t)x 2 (t)...x n (t)) T ,<br />
u(t) = (u 1 (t)u 2 (t)...u m (t)) T och y(t) = (y 1 (t)y 2 (t)...y p (t)) T där T i detta<br />
sammanhang betyder transponering. A, B, C och D är matriser av dimension<br />
n×n, n×m, p×n respektive p×m.<br />
2.1. Skriv om följande differentialekvation på tillståndsformen (1)<br />
d 2 y<br />
dt 2(t)+2cosy(t)dy (t)+siny(t) = u(t)<br />
dt<br />
genom att införa tillståndsvariablerna x 1 = y och x 2 = dy<br />
dt .<br />
1
2.2. Linjärisera systemet i förra uppgiften kring x 1 = 0, x 2 = 0, u = 0 (inga<br />
partiella derivator ska behövas!). Skriv systemet på matrisformen (2).<br />
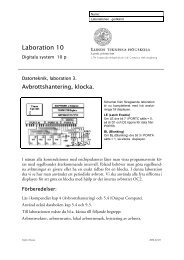
2.3. Följandeenkla kretskanrepresenteras somettsystem påtillståndsform.<br />
L<br />
i(t)<br />
u(t)<br />
R<br />
C<br />
y(t)<br />
a. Gör detta med tillstånden valda som x 1 (t) = i(t) och x 2 (t) = y(t). Skriv<br />
även upp systemet på matrisform.<br />
b. Härled (med eller utan hjälp av (a)) att överföringsfunktionen G(s) från<br />
u till y kan skrivas<br />
RCs+1<br />
G(s) =<br />
LCs 2 +RCs+1<br />
c. Gör en realisering av G(s) på styrbar kanonisk form.<br />
d. Gör en realisering av G(s) på observerbar kanonisk form.<br />
2.4.<br />
a. Bestäm överföringsfunktionen G(s) = Y(s)/U(s) för följande system<br />
( ) ( )<br />
dx −1 0 1<br />
dt = x+ u<br />
1 −2 −2<br />
y = ( 1 1 ) x<br />
b. Bestäm systemets poler och nollställen.<br />
c. Gör en ny realisering på diagonalform av systemet.<br />
2
d. Gör ytterligare en realisering av systemet fast på styrbar kanonisk form.<br />
2.5. Bestäm överföringsfunktion, poler och nollställen till följande system<br />
a. ẋ =<br />
b. ẋ =<br />
( ) ( 1 −2 2<br />
x+ u, y =<br />
2 1 3)<br />
( −1 1 ) x<br />
( ) ( ) −2 1 1<br />
x+ u, y = ( 1 1 ) x<br />
2 −3 −1<br />
2.6. Realiseraföljandeöverföringsfunktionerpådetreolikatillståndsformerna<br />
diagonalform, styrbar kanonisk form och observerbar kanonisk from:<br />
a. G(s) = −s+1<br />
s 2 +5s+4<br />
b. G(s) =<br />
2s+3<br />
s 2 +7s+10<br />
c. G(s) =<br />
2.7. Realisera följande överföringsfunktioner på styrbar resp. observerbar<br />
kanonisk form:<br />
a. G(s) =<br />
4<br />
s 2 +4s+8<br />
b. G(s) =<br />
2s 2 +3s+1<br />
s 3 +7s 2 +14s+8<br />
2.8. Två vagnar är förbundna med fjädrar och dämpare enligt följande figur:<br />
s+2<br />
s(s+1)(s+3)<br />
k<br />
z<br />
k<br />
y<br />
k<br />
u<br />
b<br />
m 1<br />
m 2<br />
Massornahosvagnarnaärm 1 resp. m 2 medanallafjädrarnaharfjäderkonstanten<br />
k. Dämparen har dämpkonstanten b. Skriv upp systemet på tillståndsform<br />
med u som insignal (notera att det är en position och inte en kraft) och z<br />
och y som utsignaler. Rullfriktionen hos vagnarna kan försummas.<br />
2.9. Skriv upp följande system på tillståndsformen (1)<br />
ÿ +2(ẏ) 2 y +(1−2y 2 )ẏ +y(1−u 2 ) = u<br />
Välj själv tillståndsvariabler och linjärisera sen systemet kring (x 1 ,x 2 ,u) =<br />
(0,0,0) (lättare än det ser ut).<br />
3
2.10. Tre bufferttankar är förbundna enligt nedanstående figur:<br />
q in<br />
h 1<br />
h 2<br />
h 3<br />
A 1<br />
A 2 A 3<br />
q ut<br />
q 12<br />
q 23<br />
Till den första tanken strömmar volymsflödet q in (t). Flödet mellan tankarna<br />
betecknas q 12 respektive q 23 och utflödet från den sista (tredje) tanken är<br />
markerat som q ut . Nivåerna i tankarna är h j ,j = 1,2,3och tvärsnittsareorna<br />
ges av A j ,j = 1,2,3. För att använda en linjär modell utförs linjärisering<br />
med x j = ∆h j = h j − h stat<br />
j ,j = 1,2,3 och u(t) = ∆q in (t) = q in − qin stat.<br />
Dessutom gäller att ∆q 12 = k 12 (x 1 − x 2 ), ∆q 23 = k 23 (x 2 − x 3 ) och ∆q ut =<br />
k 3 x 3 för flödesvariationerna mellan tankarna för det linjäriserade systemet.<br />
Observera att linjäriseringen redan är gjord vid övergången till x 1 , x 2 och u.<br />
a. Skriv upp den linjära tillståndsmodellen (med x 1 , x 2 , x 3 och u) för detta<br />
tanksystem om utsignalen väljs som x 2 .<br />
b. Beräkna de värden på tillståndsvariablerna x j ,j = 1,2,3 efter lång tid<br />
för ett viss konstant styrsignal u(t) = u 0 . Observera att beräkningen görs på<br />
det linjäriserade systemet i (a) så de verkliga nivåerna i tankarna beror även<br />
på qin stat och h stat<br />
j ,j = 1,2,3 för det bakomliggande olinjära systemet.<br />
c. Beräkna överföringsfunktionen för det linjäriserade systemet i (a) då u(t)<br />
är insignal och y(t) = x 2 (t) är utsignal.<br />
2.11. Ett olinjärt system är givet på tillståndsform:<br />
{<br />
ẋ 1 = αx 1 −x 2 −x 1 (x 2 1 +x 2 2)<br />
ẋ 2 = x 1 +αx 2 −x 2 (x 2 1 +x2 2 )<br />
4
a. Visa att (x 1 ,x 2 ) = (0,0) är en stationär punkt till systemet och linjärisera<br />
systemet kring denna punkt. Avgör även hur det linjäriserade systemets<br />
stabilitet beror av parametern α.<br />
b. Byt variabler till polär form ((x 1 ,x 2 ) → (r,φ))<br />
{<br />
x 1 = rcosφ<br />
= rsinφ<br />
x 2<br />
och visa att tillståndsekvationerna (för det olinjära systemet) i polära koordinater<br />
blir {<br />
ṙ = r(α−r 2 )<br />
˙φ = 1<br />
Kan man utläsa något mer av beteendet hos detta olinjära system från dessa<br />
ekvationer<br />
2.12. En liten kolonistuga med tre rum har uppvärmning i det stora rummet<br />
i mitten:<br />
k 20<br />
k 01<br />
k 12 k 23<br />
k 30<br />
T 1<br />
T 2 T 3<br />
T 0<br />
Radiatorns effekt är P(t) medan temperaturerna i de tre rummen är T j , j =<br />
1,2,3 [ ◦ C]. Utomhustemperaturen ges av T 0 . Värmeövergångskoefficienten<br />
mellan rum i och rum j betecknas med k ij [W/ ◦ C] (index 0 svarar mot<br />
utomhus) och värmekapaciteten hos rum i betecknas med C i , i = 1,2,3<br />
[J/ ◦ C] (eller Ws/ ◦ C).<br />
a. Bestäm en tillståndsmodell för stugan med rumstemperaturerna T j , j =<br />
5<br />
P
1,2,3 som tillstånd, utomhustemperaturen T 0 som störning och effekten P(t)<br />
som insignal. Som utsignal väljs mittrummets temperatur T 2 .<br />
b. Antag följande värden på konstanterna: C 1 = C 2 = C 3 = 2 · 10 6 J/ ◦ C,<br />
k 12 = k 23 = 200 W/ ◦ C, k 01 = k 30 = 100 W/ ◦ C, k 20 = 50 W/ ◦ C. Beräkna<br />
de temperaturer som “efter lång tid” (i stationaritet) ställer in sig i de tre<br />
rummen om utetemperaturen är konstant 0 ◦ C och effekten P är konstant 4<br />
kW.<br />
2.13. Ett system bestående av två tankar visas i följande figur:<br />
q in<br />
=q ut<br />
h 1<br />
A 1<br />
h 2<br />
q 1<br />
A 2<br />
q 2<br />
Med hjälp av Torricellis lag kan följande olinjära tillståndsmodell uppställas<br />
{<br />
dh<br />
A 1<br />
√<br />
1 = −a<br />
dt 1 2gh1 +q in<br />
A 2<br />
dh 2<br />
dt<br />
= a 1<br />
√ 2gh1 −a 2<br />
√ 2gh2<br />
därh j ärnivån,A j tvärsnittsareanocha j utloppsareanförtankj. Linjärisering<br />
av systemet kring den stationära punkten (h 1 ,h 2 ,q in ) = (h stat<br />
1 ,h stat<br />
2 ,qin stat )<br />
med tillstånden x j = ∆h j = h j −h stat<br />
j , j = 1,2 och styrsignalen u = ∆q in =<br />
q in −qin stat ger {<br />
dx1<br />
= −p 1 x 1 +c 0 u<br />
där c 0 = 1 A 1<br />
, p j = a j<br />
A j<br />
√ g<br />
2h stat<br />
j<br />
dt<br />
dx 2<br />
dt<br />
= c 1 x 1 −p 2 x 2<br />
, j = 1,2 och c 1 = a 1<br />
A 2<br />
√<br />
g<br />
2h stat<br />
1<br />
a. För ett visst tanksystem och med ett visst val av stationär punkt erhölls<br />
c 0 = 400 m −2 , c 1 = p 1 = p 2 = 0.02 rad/s. Beräkna systemets poler.<br />
6<br />
.
. Beräkna en tillståndsåterkoppling u(t) = l r r(t)−l 1 x 1 (t)−l 2 x 2 (t) sådan<br />
att polerna hos det återkopplade systemet blir −0.1 (dubbelpol) och att den<br />
statiska förstärkningen blir 1 om y = x 2<br />
2.14. En permanentmagnetiserad likströmsmotor kan beskrivas av kretsschema<br />
i följande figur:<br />
R a<br />
L a<br />
i (t)<br />
a<br />
u (t) a<br />
e (t)<br />
b<br />
T<br />
<br />
J<br />
B<br />
Beteckningar:<br />
R a = Ankarresistansen [Ω]<br />
L a = Ankarinduktansen [H (Henry)]<br />
i a = Ankarströmmen [A]<br />
u a = Ankarspänningen in [V]<br />
ω = Vinkelhastigheten [rad/s]<br />
T = Drivande moment från motorn [Nm]<br />
J = Tröghetsmoment [kg m 2 ]<br />
B = Bromskonstant [kg m 2 / s]<br />
Följande samband gäller:<br />
⎧<br />
T(t)<br />
⎪⎨<br />
e b (t)<br />
⎪⎩<br />
L a<br />
di a<br />
= k m i a (t)<br />
= k u ω(t)<br />
(t)+R dt ai a (t)+e b (t) = u a (t)<br />
+Bω = T(t)<br />
dt<br />
J dω<br />
a. Skriv systemet på tillståndsform med tillstånden x 1 (t) = i a (t) och x 2 (t) =<br />
ω(t).<br />
b. Antag att J = 0.0005 kg m 2 , B = 0.0002 kg m 2 /s, R a = 50Ω, L a = 10<br />
mH och k u = k m = 0.1 Nm/A (Vs/rad). Beräkna systemets poler.<br />
c. Beräkna en återkoppling u(t) = l r r(t) − l 1 x 1 (t) − l 2 x 2 (t) så att det<br />
återkoppladesystemetfårendubbelpoli−250ochsåattdenstatiskaförstärkningen<br />
blir 1 om utsignalen är y(t) = ω(t)<br />
7
2.15. Givet ett system<br />
⎧ ( ) ( )<br />
⎪⎨<br />
dx −2 4 1<br />
= x+ u<br />
dt 1 3 2<br />
( )<br />
⎪⎩ y = 1 −1 x<br />
a. Beräkna systemets poler.<br />
b. Beräkna en återkoppling u(t) = l r r(t)−l 1 x 1 (t)−l 2 x 2 (t) som placerar de<br />
båda polerna i s = 10±10i. Beräkna endast l 1 och l 2 .<br />
c. Varför kan inte l r beräknas så att detta system får en statisk förstärkning<br />
= 1 från r till y (Ledning: Vad gäller för nollstället till det oåterkopplade<br />
systemetochhurpåverkasnollställettilldetslutnasystemetavenåterkoppling)<br />
2.16. Givet ett system<br />
⎧<br />
⎛ ⎞<br />
−1 1 0<br />
⎪⎨<br />
dx ⎜<br />
= ⎝ 1 3 2<br />
dt<br />
(<br />
0 2 −1<br />
)<br />
⎪⎩ y = 0 1 −1 x<br />
⎟<br />
⎠x+<br />
⎛ ⎞<br />
2<br />
⎜ ⎟<br />
⎝1⎠u<br />
0<br />
a. Beräkna systemets poler.<br />
b. Beräkna l 1 , l 2 och l 3 i en återkoppling u(t) = l r r(t) − Lx(t) med L =<br />
(l 1 l 2 l 3 ) så att alla polerna hamnar i −4. Koefficienten l r behöver inte<br />
väljas eller beräknas.<br />
8