Maskinnära programmering 6B2266
Maskinnära programmering 6B2266
Maskinnära programmering 6B2266

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
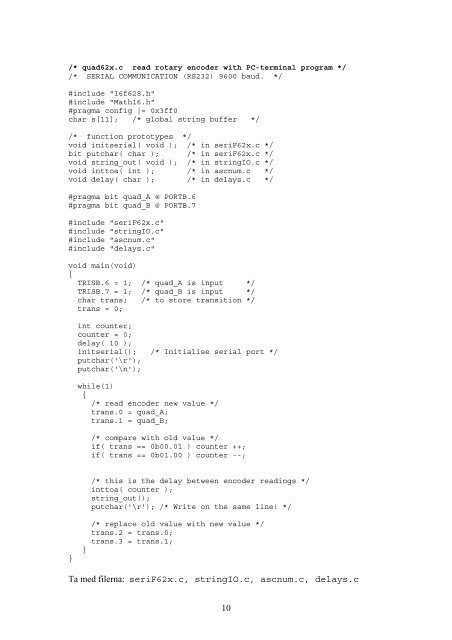
* quad62x.c read rotary encoder with PC-terminal program */<br />
/* SERIAL COMMUNICATION (RS232) 9600 baud. */<br />
#include "16f628.h"<br />
#include "Math16.h"<br />
#pragma config |= 0x3ff0<br />
char s[11]; /* global string buffer */<br />
/* function prototypes */<br />
void initserial( void ); /* in seriF62x.c */<br />
bit putchar( char ); /* in seriF62x.c */<br />
void string_out( void ); /* in stringIO.c */<br />
void inttoa( int ); /* in ascnum.c */<br />
void delay( char ); /* in delays.c */<br />
#pragma bit quad_A @ PORTB.6<br />
#pragma bit quad_B @ PORTB.7<br />
#include "seriF62x.c"<br />
#include "stringIO.c"<br />
#include "ascnum.c"<br />
#include "delays.c"<br />
void main(void)<br />
{<br />
TRISB.6 = 1; /* quad_A is input */<br />
TRISB.7 = 1; /* quad_B is input */<br />
char trans; /* to store transition */<br />
trans = 0;<br />
int counter;<br />
counter = 0;<br />
delay( 10 );<br />
initserial(); /* Initialise serial port */<br />
putchar('\r');<br />
putchar('\n');<br />
while(1)<br />
{<br />
/* read encoder new value */<br />
trans.0 = quad_A;<br />
trans.1 = quad_B;<br />
/* compare with old value */<br />
if( trans == 0b00.01 ) counter ++;<br />
if( trans == 0b01.00 ) counter --;<br />
/* this is the delay between encoder readings */<br />
inttoa( counter );<br />
string_out();<br />
putchar('\r'); /* Write on the same line! */<br />
}<br />
}<br />
/* replace old value with new value */<br />
trans.2 = trans.0;<br />
trans.3 = trans.1;<br />
Ta med filerna: seriF62x.c, stringIO.c, ascnum.c, delays.c<br />
10