Uppsats - Chalmers tekniska högskola
Uppsats - Chalmers tekniska högskola
Uppsats - Chalmers tekniska högskola

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
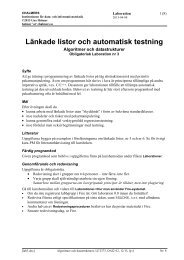
Figur 3. En användare som utnyttjar ett haptiskt inmatningsdon för att simulera en virtuell<br />
robots rörelser. I det här fallet hur roboten lyfter en vikt och förflyttar den i luften.<br />
Algoritmen som nämndes ovan fungerar bäst vid situationer som är förutsägbara, men om det<br />
skulle ske en oförutsägbar rörelse måste man kompensera för detta på något sätt.<br />
Ett s k ”elastic strip framework” togs då fram. Detta system utnyttjar energin och<br />
kroppställningen hos roboten genom att den förutbestämda riktning som roboten följer bryts<br />
ner i mycket små delar så att varje stegförflyttning som roboten utför beräknas i realtid. Ju<br />
mindre stegförflyttning som roboten gör desto större chans har den att ändra sitt<br />
rörelsemönster (riktningen den följer) och därmed kunna undvika ett snabbt uppdykande<br />
hinder eller en annan robots rörelse till exempel.<br />
Referenser<br />
[1] Mark Billinghurst and Hirokazu Kato: ”Collaborative augmented reality”<br />
Kompendiet “Kognitionsteknologiska seminarier VT2003, Datavetenskap<br />
<strong>Chalmers</strong>”<br />
[2] Wearable Platforms for Augmented and Virtual Reality, Studentprojekt på<br />
Datavetenskap <strong>Chalmers</strong> 2002/2003<br />
http://www.mdstud.chalmers.se/~dp02-2/<br />
den 28 oktober 2003 6