

Raport asupra modalitÄÅ£ilor de interac - Robotica si Realitate Virtuala
Raport asupra modalitÄÅ£ilor de interac - Robotica si Realitate Virtuala
Raport asupra modalitÄÅ£ilor de interac - Robotica si Realitate Virtuala

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
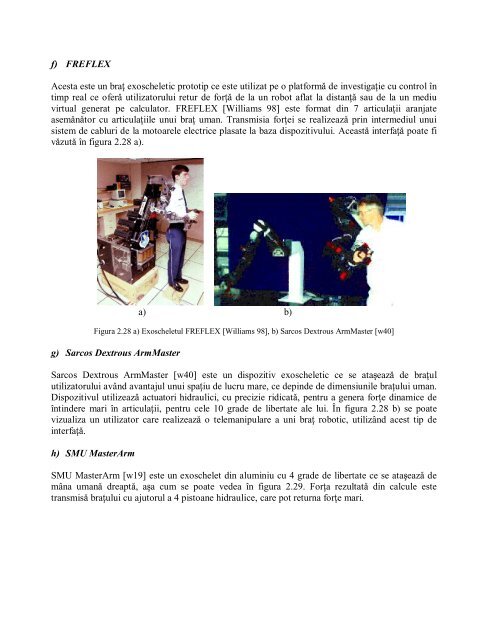
f) FREFLEX<br />
Acesta este un bra exoscheletic prototip ce este utilizat pe o platform <strong>de</strong> investigaie cu control în<br />
timp real ce ofer utilizatorului retur <strong>de</strong> for <strong>de</strong> la un robot aflat la distan sau <strong>de</strong> la un mediu<br />
virtual generat pe calculator. FREFLEX [Williams 98] este format din 7 articulaii aranjate<br />
asemntor cu articulaiile unui bra uman. Transmi<strong>si</strong>a forei se realizeaz prin intermediul unui<br />
<strong>si</strong>stem <strong>de</strong> cabluri <strong>de</strong> la motoarele electrice plasate la baza dispozitivului. Aceast interfa poate fi<br />
vzut în figura 2.28 a).<br />
a) b)<br />
Figura 2.28 a) Exoscheletul FREFLEX [Williams 98], b) Sarcos Dextrous ArmMaster [w40]<br />
g) Sarcos Dextrous ArmMaster<br />
Sarcos Dextrous ArmMaster [w40] este un dispozitiv exoscheletic ce se ataeaz <strong>de</strong> braul<br />
utilizatorului având avantajul unui spaiu <strong>de</strong> lucru mare, ce <strong>de</strong>pin<strong>de</strong> <strong>de</strong> dimen<strong>si</strong>unile braului uman.<br />
Dispozitivul utilizeaz actuatori hidraulici, cu precizie ridicat, pentru a genera fore dinamice <strong>de</strong><br />
întin<strong>de</strong>re mari în articulaii, pentru cele 10 gra<strong>de</strong> <strong>de</strong> libertate ale lui. În figura 2.28 b) se poate<br />
vizualiza un utilizator care realizeaz o telemanipulare a uni bra robotic, utilizând acest tip <strong>de</strong><br />
interfa.<br />
h) SMU MasterArm<br />
SMU MasterArm [w19] este un exoschelet din aluminiu cu 4 gra<strong>de</strong> <strong>de</strong> libertate ce se ataeaz <strong>de</strong><br />
mâna uman dreapt, aa cum se poate ve<strong>de</strong>a în figura 2.29. Fora rezultat din calcule este<br />
transmis braului cu ajutorul a 4 pistoane hidraulice, care pot returna fore mari.













