

Raport asupra modalitÄÅ£ilor de interac - Robotica si Realitate Virtuala
Raport asupra modalitÄÅ£ilor de interac - Robotica si Realitate Virtuala
Raport asupra modalitÄÅ£ilor de interac - Robotica si Realitate Virtuala

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
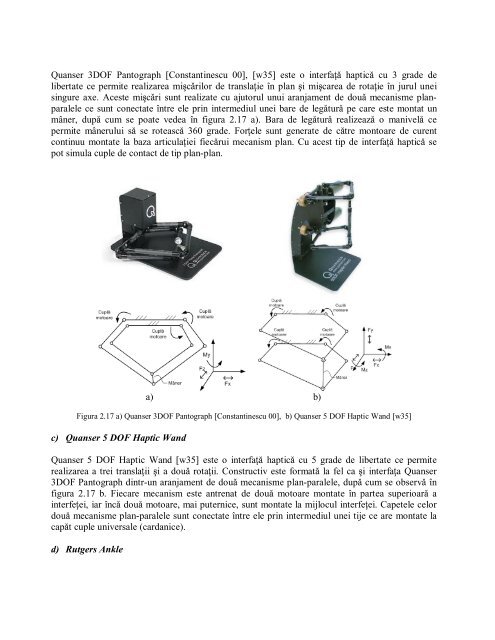
Quanser 3DOF Pantograph [Constantinescu 00], [w35] este o interfa haptic cu 3 gra<strong>de</strong> <strong>de</strong><br />
libertate ce permite realizarea micrilor <strong>de</strong> translaie în plan i micarea <strong>de</strong> rotaie în jurul unei<br />
<strong>si</strong>ngure axe. Aceste micri sunt realizate cu ajutorul unui aranjament <strong>de</strong> dou mecanisme planparalele<br />
ce sunt conectate între ele prin intermediul unei bare <strong>de</strong> legtur pe care este montat un<br />
mâner, dup cum se poate ve<strong>de</strong>a în figura 2.17 a). Bara <strong>de</strong> legtur realizeaz o manivel ce<br />
permite mânerului s se roteasc 360 gra<strong>de</strong>. Forele sunt generate <strong>de</strong> ctre montoare <strong>de</strong> curent<br />
continuu montate la baza articulaiei fiecrui mecanism plan. Cu acest tip <strong>de</strong> interfa haptic se<br />
pot <strong>si</strong>mula cuple <strong>de</strong> contact <strong>de</strong> tip plan-plan.<br />
a) b)<br />
Figura 2.17 a) Quanser 3DOF Pantograph [Constantinescu 00], b) Quanser 5 DOF Haptic Wand [w35]<br />
c) Quanser 5 DOF Haptic Wand<br />
Quanser 5 DOF Haptic Wand [w35] este o interfa haptic cu 5 gra<strong>de</strong> <strong>de</strong> libertate ce permite<br />
realizarea a trei translaii i a dou rotaii. Constructiv este format la fel ca i interfaa Quanser<br />
3DOF Pantograph dintr-un aranjament <strong>de</strong> dou mecanisme plan-paralele, dup cum se observ în<br />
figura 2.17 b. Fiecare mecanism este antrenat <strong>de</strong> dou motoare montate în partea superioar a<br />
interfeei, iar înc dou motoare, mai puternice, sunt montate la mijlocul interfeei. Capetele celor<br />
dou mecanisme plan-paralele sunt conectate între ele prin intermediul unei tije ce are montate la<br />
capt cuple universale (cardanice).<br />
d) Rutgers Ankle













