MODELE GEOMETRICE, CINEMATICE ÅI DINAMICE
MODELE GEOMETRICE, CINEMATICE ÅI DINAMICE
MODELE GEOMETRICE, CINEMATICE ÅI DINAMICE

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Modele geometrice şi cinematice 26<br />
<strong>MODELE</strong> <strong>GEOMETRICE</strong>,<br />
<strong>CINEMATICE</strong> ŞI <strong>DINAMICE</strong><br />
Sistemul mecanic al unui robot este format dintr-o configuraţie de corpuri<br />
rigide, elementele sistemului, legate între ele succesiv prin articulaţii de rotaţie sau<br />
translaţie. Poziţiile relative ale acestor elemente determină poziţia pe ansamblu a<br />
braţului mecanic, această poziţie reprezentând de fapt una din condiţiile funcţionale<br />
ale robotului.<br />
Cele mai cunoscute versiuni de articulaţii mecanice întâlnite în sistemele<br />
robotice sunt reprezentate prin lanţuri cinematice deschise în care poziţia viteza şi<br />
acceleraţia unui element pot fi obţinute recursiv din parametrii elementului<br />
precedent. În general, fiecare element conţine un singur grad de libertate în raport<br />
cu elementul precedent astfel încât relaţiile de transformare între elemente conţin<br />
un singur parametru variabil. Legarea în cascadă a tuturor transformărilor asociate<br />
fiecărui element permite determinarea parametrilor mişcării întregii configuraţii<br />
mecanice şi, în general, a elementului terminal.<br />
2.1. Sisteme de coordonate<br />
Operaţiile de manipulare specifice unui robot cer, în primul rând, o<br />
poziţionare corespunzătoare a sistemului mecanic, deci atingerea unui punct din<br />
spaţiul de lucru, şi în al doilea rând impun o anumită orientare a elementului<br />
terminal. De exemplu, o operaţie de montaj prin filetare cere atât atingerea găurii<br />
cât şi orientarea corectă a şurubului pentru realizarea asamblării. se impune deci<br />
adoptarea unui sistem de coordonate corespunzător descrierii acestor cerinţe.<br />
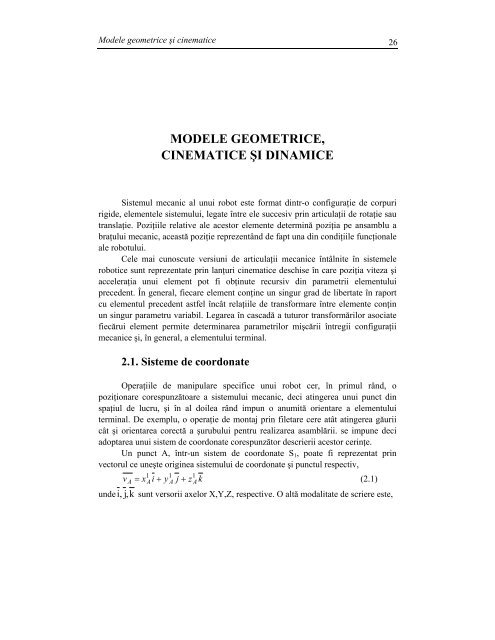
Un punct A, într-un sistem de coordonate S 1 , poate fi reprezentat prin<br />
vectorul ce uneşte originea sistemului de coordonate şi punctul respectiv,<br />
v<br />
A<br />
1<br />
A<br />
1<br />
A<br />
1<br />
A<br />
x i y j z k<br />
(2.1)<br />
undei , j, k sunt versorii axelor X,Y,Z, respective. O altă modalitate de scriere este,
Modele geometrice şi cinematice 27<br />
1<br />
<br />
1 1 1<br />
A, y A,<br />
z A<br />
<br />
A x<br />
(2.2)<br />
unde indicele superior 1 precizează sistemul de coordinate S 1 .<br />
În afară de aceasta, direcţia vectorului de poziţie se poate exprima prin<br />
cosinuţii de direcţie,<br />
1<br />
A<br />
1<br />
1<br />
x<br />
y<br />
cos ;<br />
A z<br />
cos ; cos A<br />
(2.3)<br />
v<br />
v v<br />
Dacă acum, originea sistemului de coordonate O 1 se exprimă în raport cu un<br />
sistem S 2 prin coordonatele<br />
<br />
2 2 2<br />
1 xO<br />
, y ,<br />
1 O z<br />
1 O1<br />
<br />
O (2.4)<br />
atunci punctul A se va exprima în raport cu sistemul S 2 prin,<br />
A<br />
z 1 (s 1 )<br />
z A<br />
v A<br />
y A<br />
y 1<br />
o 1<br />
x A<br />
x 1<br />
2<br />
<br />
1<br />
A<br />
(s 2 )<br />
2 1 2 1 2<br />
O , y ,<br />
1 A yO<br />
z<br />
1 A zO<br />
1<br />
z 1<br />
z 2<br />
o 2<br />
x 2 y 2<br />
Figura 2.1<br />
<br />
A<br />
y 1<br />
o 1<br />
x 1<br />
x x<br />
(2.5)<br />
Relaţia (2.5) corespunde unei reprezentări între două sisteme afectate de<br />
operaţii de translaţie (axele sînt paralele, respectiv). Dacă sistemele de<br />
coordonate sînt supuse unor mişcări de rotaţie, poziţia unui punct în diferite<br />
sisteme se poate obţine printr-o transformare corespunzătoare. Considerăm,<br />
de exemplu, sistemul S 2 obţinut prin rotaţia cu unghiul θ în jurul axei Ζ a<br />
sistemului Sj (figura 2.2).<br />
Poziţia în noul sistem se obţine prin multiplicarea coordonatelor iniţiale<br />
cu o matrice de rotaţie.<br />
(s 1 )
Modele geometrice şi cinematice 28<br />
z 1 ≡ z 2<br />
y 2<br />
θ y 1<br />
o<br />
θ<br />
x 1<br />
x 2<br />
Figura 2.2<br />
2 <br />
1<br />
x<br />
<br />
A cos<br />
sin<br />
0<br />
xA<br />
2 <br />
<br />
1 <br />
y<br />
A <br />
<br />
sin<br />
cos<br />
0<br />
y<br />
A <br />
(2.6)<br />
2 <br />
<br />
1<br />
z<br />
<br />
A 0 0 1<br />
z<br />
A <br />
În foarte multe situaţii este de preferat să se utilizeze o transformare globală<br />
care să comaseze atît efectul de translaţie cît şi pe cel de rotaţie. O astfel de<br />
transformare se numeşte omogenă. Această transformare poate fi definită ca<br />
rezultatul concatenării a două matrici, de orientare (4 χ 3) şi de poziţie, un vector<br />
(4x1).<br />
matrice<br />
de vector coloană<br />
T <br />
<br />
<br />
orientare al pozitiei<br />
(2.7)<br />
<br />
4 x 3 4<br />
x 1<br />
<br />
De exemplu, translaţia specificată în figura 2.1 b corespunde transformării<br />
omogene definită prin<br />
<br />
2<br />
1 0 0 x <br />
01<br />
<br />
2 <br />
2 2 2<br />
<br />
0<br />
1 0 y01<br />
Trans x<br />
<br />
01,<br />
y01,<br />
z01<br />
(2.8)<br />
<br />
2<br />
0 0 1 z <br />
01<br />
<br />
<br />
<br />
0 0 0 1 <br />
unde simbolul Trans este asociat funcţiei de translaţie. Calculul coordonatelor<br />
punctului A în sistemul S 2 definit prin componentele (2.2) în sistemul Sj se<br />
obţine imediat prin simpla aplicare a operatorului de translaţie asupra jj<br />
vectorului coordonatelor în S 1<br />
1 2 <br />
1 <br />
x A x01<br />
x A <br />
<br />
1 2<br />
2<br />
2 2 2 1<br />
y<br />
A y01<br />
A Transx x , , <br />
01 y01<br />
z01<br />
y<br />
A <br />
(2.9)<br />
1 2<br />
<br />
1 z z<br />
z<br />
A 01<br />
A <br />
<br />
<br />
1
Modele geometrice şi cinematice 29<br />
deci aceleaşi rezultate ca cele date în relaţia (2.5).<br />
În mod similar, se pot defini operatori de rotaţie, corespunzători unei<br />
rotaţii cu unghiul θ, în jurul fiecărei axe de coordonate,<br />
1<br />
0 0 0<br />
<br />
<br />
<br />
0 cos<br />
sin<br />
0<br />
Rot x,<br />
<br />
<br />
(2.10)<br />
0<br />
sin<br />
cos<br />
0<br />
<br />
<br />
0<br />
0 0 1<br />
cos<br />
0 sin<br />
0<br />
<br />
<br />
<br />
0 1 0 0<br />
Rot y,<br />
<br />
<br />
(2.11)<br />
<br />
sin<br />
0 cos<br />
0<br />
<br />
<br />
0 0 0 1<br />
cos<br />
sin<br />
0 0<br />
<br />
<br />
<br />
sin<br />
cos<br />
0 0<br />
Rot z,<br />
<br />
<br />
(2.12)<br />
0 0 1 0<br />
<br />
<br />
0 0 0 1<br />
Aplicarea succesivă a acestor operatori permite calculul coordonatelor<br />
pentru orice modificare a sistemului de coordonate. De exemplu, un punct de<br />
coordonate (7,3,2) în sistemul S! este supus succesiv următoarelor transformări:<br />
o rotaţie în jurul axei Ζ cu 90° (sistemul S2 ), o rotaţie în jurul axei Υ cu 90°<br />
(sistemul S3 ) şi o translaţie cu vectorul (4,-3,7) (sistemul S4).<br />
Deci, în noul sistem, coordonatele punctului vor fi date de<br />
4<br />
1<br />
4,3,7<br />
,<br />
Roty,90,<br />
Rotz,90A<br />
A Trans<br />
sau<br />
1<br />
0 0 4 <br />
0 0 1 00<br />
1 0 07<br />
6 <br />
<br />
<br />
<br />
<br />
<br />
<br />
0 1 0 3<br />
<br />
0 1 0 0<br />
<br />
1 0 0 0<br />
<br />
3<br />
<br />
4<br />
<br />
(2.13)<br />
0<br />
0 1 7 1<br />
0 0 00<br />
0 0 12<br />
10<br />
<br />
<br />
<br />
<br />
<br />
0<br />
0 0 1 <br />
0 0 0 10<br />
0 0 11<br />
1 <br />
Trebuie subliniată necesitatea respectării ordinei operaţiilor efectuate.<br />
Evident,<br />
Rot y, Rot z, Rot z, Rot y,<br />
<br />
(2.14)<br />
<br />
Pentru generalizarea procedurilor de lucru, se va nota prin T. transformarea<br />
generală a sistemului de coordonate Sj în raport cu sistemul S,· . în acest context,<br />
funcţia de poziţionare a braţului unui robot se poate interpreta prin definirea<br />
corespunzătoare a operatorilor transformărilor.
Modele geometrice şi cinematice 30<br />
S M<br />
S P1<br />
M S P0<br />
T P1<br />
S B<br />
S 0<br />
T M<br />
B<br />
T B<br />
0<br />
T P0<br />
0<br />
Figura 2.3<br />
În figura 2.3. este prezentat un robot ce execută o operaţie tehnologică<br />
(sudură, găurire, etc) asupra piesei P. Mişcările robotului sînt definite prin<br />
transformări corespunzătoare în raport cu un sistem de referinţă absolut S · 0<br />
Elementele braţului mecanic, prin articulaţiile sale, permit determinarea unei<br />
transformări generale a sistemului de referinţă a elementului terminal (mâna) în<br />
raport cu baza S B , transformare desemnată prin<br />
T M<br />
B , care la rîndul ei este definită<br />
0<br />
0<br />
în raport cu sistemul de referinţă absolut S prin transformarea<br />
T B .Deci, poziţia<br />
B<br />
absolută a mâinii este redată prin produsul transformărilor<br />
T T 0<br />
M B . Se va nota: T<br />
M P 1<br />
-transformarea implicată de operaţia tehnologică exercitată de mîna asupra piesei Ρ<br />
PO<br />
O<br />
în punctul 1 şi T , T , transformările ce desemnează poziţia punctului 1 faţă<br />
P1<br />
P O<br />
de referinţa piesei S P O<br />
şi faţă de sistemul de referinţă absolut, respectiv.<br />
În condiţiile realizării unei funcţii tehnologice corecte, coordonatele<br />
punctului prelucrat trebuie să satisfacă transformarea de-a lungul lanţului cinematic<br />
al robotului, deci<br />
M<br />
P1<br />
B<br />
M<br />
O<br />
B<br />
P O O<br />
T<br />
P1<br />
PO<br />
T T T T<br />
(2.15)<br />
Întrucât scopul final al oricărei prelucrări matematice de acest fel constă în<br />
găsirea unui control adecvat al braţului mecanic, deci transformarea T M<br />
B , din<br />
relaţia (2.15) se obţine,<br />
T<br />
B<br />
M<br />
<br />
M P<br />
<br />
O O O<br />
T<br />
T T T<br />
1<br />
P1<br />
1 P1<br />
PO<br />
B<br />
(2.16)
Modele geometrice şi cinematice 31<br />
Deşi formula stabilită dă pur formal condiţiile funcţionale ale robotului, ea<br />
sintetizează exact principalele cerinţe ce se impun pentru acoperirea unei funcţii<br />
tehnologice date de către o anumită configuraţie mecanică. Aceste deziderate pot fi<br />
rezumate în următoarele:<br />
a) atingerea de către elementul terminal al braţului mecanic a unui<br />
B<br />
punct de coordonate impus, - transformarea T M ;<br />
b) asigurarea unei orientări adecvate a mâinii robotului în conformitate<br />
M<br />
cu funcţia tehnologică îndeplinită - transformarea TP<br />
1 .<br />
Pentru definirea corectă a ultimei condiţii se introduce o matrice de orientare<br />
a mâinii T M definită prin [17] nx<br />
ox<br />
ax<br />
px<br />
<br />
<br />
<br />
n y o y a y p y<br />
T M<br />
nz<br />
oz<br />
az<br />
pz<br />
<br />
(2.17)<br />
0 0 0 1 <br />
unde a este un vector unitate în direcţia apropierii mâinii de obiect, o este un<br />
vector unitate de orientare al elementului iar f n este definit prin<br />
n o x a<br />
(2.18)<br />
În matricea T M se poate identifica o submatrice de orientare T MO<br />
nx<br />
ox<br />
ax<br />
<br />
T <br />
<br />
<br />
MO <br />
ny<br />
oy<br />
a y <br />
<br />
nz<br />
oz<br />
az<br />
<br />
şi un vector de poziţie<br />
px<br />
<br />
T<br />
<br />
MP <br />
<br />
p y <br />
<br />
pz<br />
<br />
Matricea T MC este o matrice ortonormală iar elementele ei au o serie de<br />
proprietăţi care simplifică considerabil prelucrările matematice.<br />
În plus, matricea de orientare T M admite o inversă de forma,<br />
nx<br />
n y nz<br />
pn<br />
<br />
<br />
1<br />
<br />
ox<br />
oy<br />
oz<br />
po<br />
T <br />
<br />
M (2.19)<br />
ax<br />
a y az<br />
pa<br />
<br />
<br />
0 0 0 1 <br />
unde pn, po, pa desemnează produsele scalare ai vectorilor respective.
Modele geometrice şi cinematice 32<br />
2.2. Modele cinematice<br />
După cum s-a văzut în paragraful precedent, prima condiţie necesară<br />
B<br />
funcţionării robotului este determinarea transformării T M ce asigură atingerea<br />
B<br />
unui punct dorit. Dar T M definit de (2.16) este numai o reprezentare matematică<br />
formală. Ea trebuie corelată cu structura mecanică a robotului astfel încât să poată<br />
fi determinate toate transformările individuale, pe fiecare articulaţie controlată a<br />
braţului mecanic.<br />
După cum s-a mai arătat, sistemul mecanic al robotului este realizat prin<br />
legarea succesivă a unor articulaţii simple de rotaţie şi translaţie, poziţia fiecărui<br />
element putînd fi definită în raport cu elementul precedent printr-o singură<br />
variabilă de rotaţie (unghi) sau de translaţie (deplasare).Dacă se notează cu A i<br />
matricea transformării ce descrie translaţia şi rotaţia relativă între sistemul de<br />
coordonate al elementului i şi al elementului i-1, atunci transformarea asociată<br />
mâinii robotului se poate scrie ca,<br />
B<br />
T M = A 1 A2<br />
A 3 ... A n<br />
(2.20)<br />
p<br />
a<br />
o<br />
n<br />
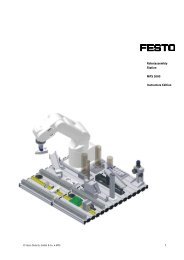
Figura 2.4<br />
unde n reprezintă numărul de elemente al braţului.<br />
Calculul matricei de transformare A i pentru o articulaţie dată este riguros<br />
prezentat într-un număr mare de lucrări de specialitate. în cadrul acestui capitol se<br />
va utiliza metoda Denavit-Hartenberg datorită avantajelor deosebite privind atât<br />
simplitatea tratării cât şi posibilităţile mari de generalizare pe care le oferă.<br />
Convenţiile impuse de această metodă sunt [4,5,24,25]<br />
se aliniază axele X ale tuturor sistemelor de referinţă ale<br />
articulaţiilor în aceeaşi direcţie cu cea a sistemului de bază.<br />
axa Zi coincide cu axa de rotaţie a articulaţiei i;
y i-1<br />
θ i<br />
x i-1<br />
Figura 2.5<br />
Modele geometrice şi cinematice 33<br />
se roteşte cu un unghi i în jurul axei Z i1<br />
se translatează cu mărimea d i , în lungul axei Z i1<br />
se translatează cu mărimea a i în lungul axei X i1<br />
se roteşte cu un unghi i în sensul orar, în jurul axei<br />
spre Z i1<br />
X i , axa<br />
Z i<br />
x i<br />
z i-1 ║z i<br />
y 2<br />
o<br />
α i<br />
z i-1<br />
În figura 2.5. sînt reprezentaţi parametrii Denavit-Hartenberg pentru o<br />
articulaţie de formă generală.În practică, configuraţia geometrică a unei articulaţii<br />
este reprezentată printr-o serie de parametri constanţi, lungimea a i şi unghiul i<br />
parametrii variabili fiind unghiul i la o articulaţie de rotaţie sau lungimea d i la o<br />
articulaţie de translaţie.<br />
Deci, matricea transformării omogene A i între articulaţia i şi i-1 va fi,<br />
Ai<br />
Rotz,<br />
i Trans0,0,<br />
di<br />
Transai<br />
,0,0Rotx,<br />
i<br />
<br />
Utilizând formulele stabilite (2.8), (2.10) - (2.12) şi substituind în (2.21)<br />
rezultă,<br />
cos<br />
i sin<br />
i 0 01<br />
0 0 0 1<br />
0 0 ai<br />
1<br />
0 0 0<br />
<br />
<br />
<br />
<br />
<br />
<br />
sin<br />
i cos<br />
i 0 0<br />
<br />
0 1 0 0<br />
<br />
0 1 0 0<br />
<br />
0 cos<br />
i sin<br />
i 0<br />
A <br />
<br />
i<br />
0 0 1 00<br />
0 1 di<br />
0<br />
0 1 0 0<br />
sin<br />
i cos<br />
i 0<br />
<br />
<br />
<br />
<br />
<br />
0 0 0 10<br />
0 0 1 0<br />
0 0 1 0<br />
0 0 1<br />
sau
Modele geometrice şi cinematice 34<br />
A<br />
i<br />
cos<br />
<br />
<br />
sin<br />
<br />
0<br />
<br />
0<br />
sin<br />
cos<br />
cos<br />
cos<br />
i<br />
i<br />
sin<br />
0<br />
i<br />
i<br />
i<br />
sin<br />
sin<br />
i<br />
cos<br />
cos<br />
i<br />
cos<br />
0<br />
i<br />
i<br />
i<br />
ai<br />
<br />
0<br />
<br />
<br />
di<br />
<br />
<br />
1 <br />
(2.22)<br />
1<br />
1<br />
1<br />
1 1<br />
1 1<br />
φ 2 l 2<br />
φ 3 l 3<br />
φ 4<br />
l 1<br />
φ 1<br />
l 4<br />
φ 5<br />
1<br />
φ 6<br />
l 6<br />
Figura 2.6<br />
Pentru exemplificarea procedeurilor de calcul privind construcţia modelului<br />
cinematic, se va analiza robotul din figura (2.6)[17,62] al cărui lanţ cinematic<br />
conţine numai articulaţii de rotaţie.<br />
Robotul prezentat în figura 2.6 a are şase grade de libertate. Pentru<br />
determinarea parametrilor de transformare, în figura 2.6, b este reprezentat<br />
simbolic lanţul cinematic orientat pentru respectarea condiţiilor expuse mai sus<br />
(axele X au aceeaşi direcţie).<br />
i
Modele geometrice şi cinematice 35<br />
y 1 y 1 y 2 y 2 y 3<br />
l 2<br />
x 1<br />
x 2<br />
x x 3<br />
2<br />
3<br />
y 1 l 1<br />
φ 1<br />
5<br />
z<br />
φ 2<br />
θ φ3<br />
2 = φ 2<br />
θ 3 = φ 3<br />
a 2 =l 2<br />
a 3 =l 3<br />
d 2 =0<br />
d 3 =0<br />
l 3<br />
x 1<br />
z 1 z 1 z 2 z 2<br />
θ1 = φ x 3<br />
z 4<br />
φ x<br />
φ 6<br />
1<br />
4 y 4<br />
a 1 =0<br />
z 3<br />
l 5 z 5<br />
d 1 =0<br />
l 4<br />
α 1 =90 o θ 6 = φ 6<br />
l<br />
a y 6<br />
6 =0<br />
6<br />
x 1<br />
α 1 =0<br />
α 3 =0<br />
θ 4 = φ 4<br />
x 2<br />
x 5 d 6 =l 6<br />
a 4 =0<br />
θ 5 = φ 5<br />
α<br />
z 2<br />
z 6 =0<br />
5<br />
d 4 =l<br />
a 5 =0<br />
4 y 2<br />
y 5<br />
α<br />
z 6<br />
4 =90 o d 5 =l 5<br />
α 5 =90 o x 6<br />
z 1<br />
y 3<br />
y 5<br />
φ<br />
x 4 5<br />
Figura 2.7<br />
În figura 2.7. sunt reprezentate axele de coordonate pentru fiecare pereche<br />
de articulaţii. De exemplu, pentru sistemele de referinţă S<br />
0 , S 1 <br />
alinierea axelor X 0 şi Χ 1 determină următorii parametri: unghiul de rotaţie 1 în<br />
jurul axei Z 0 este parametrul i , distanţa l 1 măsurată pe axa Z 0 între cele două<br />
origini este parametrul d 1 , parametrul 1<br />
este unghiul măsurat în sens orar între<br />
Z 1 şi Zo , deci 1 = 90° , iar abaterea măsurata pe axele X între cele două origini<br />
dă a 1 =0.<br />
Matricea transformării între cele două sisteme, pentru această primă<br />
articulaţie, se obţine înlocuind parametrii determinaţi în relaţia (2.23). Rezultă,<br />
cos1<br />
0 sin1<br />
0<br />
<br />
<br />
<br />
sin1<br />
0 cos1<br />
0<br />
A <br />
<br />
1<br />
0 1 0 l1<br />
<br />
<br />
<br />
0 0 0 1<br />
Parametrii celorlalte articulaţii se pot obţine în aceeaşi manieră din figura<br />
2.7, iar matrlcele corespunzătoare vor fi
Modele geometrice şi cinematice 36<br />
cos2<br />
sin1<br />
0 l2<br />
cos2<br />
<br />
<br />
<br />
<br />
sin2<br />
cos2<br />
0 l2<br />
sin2<br />
A<br />
<br />
2<br />
0 0 1 0 <br />
<br />
<br />
0 0 0 1 <br />
cos3<br />
sin3<br />
0 l3<br />
cos3<br />
<br />
<br />
<br />
<br />
sin3<br />
cos3<br />
0 l3<br />
sin3<br />
A<br />
<br />
3<br />
0 0 0 0 <br />
<br />
<br />
0 0 0 1 <br />
cos4<br />
0 sin4<br />
0 <br />
<br />
<br />
<br />
sin4<br />
0 cos4<br />
0<br />
A <br />
<br />
4<br />
(2.23)<br />
0 1 0 l4<br />
<br />
<br />
<br />
0 0 0 1 <br />
cos5<br />
0 sin54<br />
0 <br />
<br />
<br />
<br />
sin5<br />
0 cos5<br />
0<br />
A<br />
<br />
5<br />
0 1<br />
0 l5<br />
<br />
<br />
<br />
0 0 0 1 <br />
cos6<br />
sin6<br />
0 0 <br />
<br />
<br />
<br />
sin6<br />
cos6<br />
0 0<br />
A<br />
<br />
6<br />
0 0 1 l6<br />
<br />
<br />
<br />
0 0 0 1 <br />
O tratare similară poate fi obţinută pentru lanţuri cinematice care conţin şi<br />
articulaţii de translaţie. În figura 2.8 este prezentat un astfel de robot cu trei grade<br />
de libertate.Din analiza parametrilor asociaţi celor trei articulaţii de translaţie,<br />
rezultă:
Modele geometrice şi cinematice 37<br />
2 3<br />
1<br />
a<br />
z 0<br />
z 2<br />
z 3<br />
y 0<br />
y 2<br />
y 3<br />
a 1<br />
y 1<br />
x 0 x 1 x 2 x 3<br />
z 2<br />
y 1<br />
z 1 d 3<br />
x 1<br />
z 1<br />
1 0 0 a1<br />
1<br />
0 0 0 1<br />
0 0 0 <br />
<br />
<br />
<br />
0 0 1 0<br />
<br />
<br />
A<br />
<br />
0 0 1<br />
0<br />
<br />
<br />
<br />
1<br />
A <br />
<br />
0 1 0 0<br />
2<br />
A <br />
3 <br />
(2.24)<br />
0<br />
1<br />
0 0 0<br />
1 0 d2<br />
0<br />
0 1 d3<br />
<br />
<br />
<br />
<br />
<br />
0<br />
0 0 1 0<br />
0 0 1 0<br />
0 0 1 <br />
Transformarea generală asociată întregului lanţ cinematic va fl:<br />
TM B A<br />
1A2<br />
A3<br />
d 2<br />
x 2<br />
y 2<br />
1<br />
0 0 a1<br />
<br />
<br />
<br />
<br />
0 1 0 d2<br />
T <br />
<br />
M B (2.25)<br />
0<br />
0 1 d3<br />
<br />
<br />
<br />
0<br />
0 0 1 <br />
Variabilele mişcării sunt cele trei deplasări liniare a 1 , d 2 , d 3 , de şi ele apar, în<br />
mod firesc, în cadrul coloanei vectorului de poziţie.<br />
b<br />
Figura 2.8
Modele geometrice şi cinematice 38<br />
Modelele prezentate s-au referit la roboţi cu articulaţii numai de rotaţie sau<br />
numai de translaţie. Procedura se poate aplica în aceeaşi manieră pentru lanţuri<br />
cinematice cu diverse tipuri de articulaţii. Structurile mecanice uzuale întîlnite la<br />
cele mai cunoscute familii de roboţi industriali se grupează, după coordonatele ce<br />
descriu poziţiile braţului, în: roboţi de coordonate carteziene, cilindrice, sferice, de<br />
rezoluţie etc. Indiferent de tipul utilizat, calculul cinematic se realizează după<br />
metoda expusă, determinînd parametrii D.H. ai fiecărei articulaţii şi formînd cu<br />
aceştia matricele de transformare.<br />
2.3. Problema controlului poziţiei<br />
Paragraful anterior a stabilit procedurile de determinare a transformărilor<br />
omogene Af pentru diferite tipuri de braţe mecanice. Pe baza lor se obţine, prin<br />
multiplicare succesivă, transformarea generală ce exprimă poziţia elementului final<br />
(terminalul sau mîna robotului) în raport cu sistemul de referinţă al bazei.<br />
Nu trebuie să uităm însă că scopul final al oricărei aplicaţii robotice este de a<br />
realiza o anumită funcţie tehnologică şi, în cadrul ei, o primă cerinţă este<br />
poziţionarea corectă a braţului mecanic într-un punct sau de-a lungul unei<br />
traiectorii impuse.<br />
B<br />
Aceasta înseamnă implicit că transformarea generală T M trebuie să<br />
verifice coordonatele punctului de lucru. Se poate formula, deci următoarea<br />
problemă de control: "care sunt parametrii variabili asociaţi fiecărei articulaţii<br />
pentru ca coordonatele elementului „terminal să verifice un punct dat în<br />
spaţiul de operare, asigurînd totodată şi o anumită orientare a mâinii<br />
robotului.<br />
În acest fel, relaţiile ce definesc transformările cinematice devin ecuaţii de<br />
control cinematic.<br />
Rezolvarea ecuaţiilor cinematice reprezintă în general o problemă dificilă.<br />
Acest lucru este determinat nu atît de numărul ecuaţiilor cît de neliniaritatea lor.<br />
Pentru ilustrarea dificultăţilor ce apar în ecuaţiile de acest tip vom aborda<br />
problema controlului cinematic al modelelor deduse în paragraful precedent.<br />
În cazul robotului în coordonate carteziene din figura (2.8) ecuaţia generală a<br />
braţului este dată de produsul celor trei matrici în formula (2.25). Deci, poziţia -<br />
orientarea braţului va fi din (2.19).<br />
1<br />
0 0 a1<br />
<br />
<br />
<br />
<br />
0 1 0 d2<br />
T <br />
<br />
M B (2.25)<br />
0<br />
0 1 d3<br />
<br />
<br />
<br />
0<br />
0 0 1
Modele geometrice şi cinematice 39<br />
Este evident că un astfel de robot va controla numai poziţia elementului<br />
terminal nu şi orientarea, calculul vectorial de poziţie fiind obţinut direct<br />
px<br />
<br />
p <br />
<br />
<br />
p y <br />
(2.26)<br />
<br />
pz<br />
<br />
unde,<br />
p a<br />
p<br />
x<br />
y<br />
1<br />
a<br />
2<br />
(2.27)<br />
pz<br />
a3<br />
Simplitatea soluţiei este datorată absenţei neliniarităţii la aceste<br />
transformări specifice articulaţiilor de translaţie, dar apare clar faptul că un astfel<br />
de robot nu asigură funcţia de orientare a braţului. ţ<br />
Se va considera acum robotul cu articulaţii de rotaţie prezentat în figura 2.6.<br />
Modelul cinematic al braţului se obţine prin multiplicarea matricilor A i din (2.23),<br />
TM B A1<br />
A2<br />
A3<br />
A4<br />
A5<br />
A<br />
(2.29)<br />
Efectuând înmulţirea matricilor şi identificînd componentele generale ale<br />
matricei de orientare - poziţia (2.19) se obţine [62]<br />
n x cos1 cos<br />
2 3<br />
4 cos5<br />
cos6<br />
sin1<br />
sin5<br />
cos6<br />
<br />
sin<br />
2 3<br />
4<br />
cos1<br />
sin6<br />
n y sin1 cos<br />
2 3<br />
4 cos5<br />
cos6<br />
cos1<br />
sin5<br />
cos6<br />
<br />
sin<br />
2 3<br />
4 sin1<br />
sin6<br />
n z sin<br />
2 3<br />
4 cos5<br />
cos6<br />
cos<br />
2 3<br />
4 sin6<br />
o x cos1 cos<br />
2 3<br />
4 cos5<br />
sin<br />
6 sin1<br />
sin5<br />
sin6<br />
<br />
cos1 sin<br />
2 3<br />
4 cos6<br />
o y sin1 cos<br />
2 3<br />
4 cos5<br />
sin<br />
6 cos1<br />
sin5<br />
sin<br />
6 <br />
sin1 sin<br />
2 3<br />
4 cos6<br />
o z cos<br />
2 3<br />
4 cos<br />
6 sin<br />
2 3<br />
4 cos5<br />
sin6<br />
(2.30)<br />
a x sin1 cos5<br />
cos1<br />
cos<br />
2 3<br />
4<br />
sin5<br />
a y sin1 cos<br />
2 3<br />
4 sin5<br />
cos1<br />
cos5<br />
a z sin<br />
2 3<br />
4 sin5<br />
(2.31)<br />
p x l2 cos1<br />
cos<br />
2 l3<br />
cos1<br />
cos<br />
2 3<br />
<br />
l5<br />
sin<br />
2 3<br />
4 cos1<br />
<br />
l 6 sin1<br />
cos5<br />
cos1<br />
cos<br />
2 3<br />
4<br />
sin5<br />
<br />
p y l2 sin1<br />
cos2<br />
l3<br />
sin1<br />
cos<br />
2 3<br />
<br />
l5<br />
sin1<br />
sin<br />
2 3<br />
4 <br />
l 6 sin1<br />
cos<br />
2 3<br />
4 sin5<br />
cos1<br />
cos5
Modele geometrice şi cinematice 40<br />
<br />
2 3<br />
<br />
l5<br />
<br />
2 3<br />
<br />
<br />
<br />
p z l1 l2<br />
sin2<br />
l3<br />
sin<br />
cos<br />
4<br />
l 6 sin<br />
2 3<br />
4<br />
sin<br />
5<br />
Ecuaţiile stabilite pun în evidenţă foarte bine complexitatea problemei<br />
controlului cinematic. Pentru o poziţie şi orientare a elementului terminal al<br />
robotului impuse, deci p x , p y , p z , n x , n y , n z , o x , o y , o z , a x , a y , i luînd valori prescrise,<br />
se cere calcularea valorilor unghiurilor φ 1 , φ 2 ,..., φ 6 care satisfac ecuaţiile (2.30).<br />
Este evident că determinarea variabilelor de control φ 1 , φ 2 ,..., φ 6 pentru<br />
asigurarea atît a poziţiei dorite, cît şi a orientării mîinii nu este posibilă, în<br />
principiu, se impune numai o poziţionare riguroasă şi o orientare parţial satisfăcută<br />
(care se presupune că, totuşi, acoperă cerinţele tehnologice impuse). Chiar în acest<br />
caz, o soluţionare analitică este evident extrem de dificilă. Tratarea numerică pe un<br />
calculator adecvat implică şi ea dificultăţi serioase şi în orice caz efortul de calcul<br />
este extrem de mare, problema de control neputînd fi abordată ca o problemă în<br />
timp real. O tratare off-line pe un calculator numeric este practic singura modalitate<br />
de utilizare a controlului cinetic. Pentru diferite puncte, de-a lungul traiectoriei<br />
impuse, se calculează aprioric valorile variabilelor de control ale articulaţiilor, ele<br />
urmînd să reprezinte mărimile de referinţă în sistemul propiu-zis de conducere al<br />
mişcării.<br />
În literatura de specialitate se pot menţiona eforturile diverşilor autori pentru<br />
soluţionarea acestei probleme. Menţionăm metoda propusă de Paul Shimano şi<br />
Meyer [5,25] care izolează seccesiv fiecare variabilă de elementul terminal prin<br />
premultiplicarea cu inversele matricilor A i . Lee şi Siegler [24] separă problema<br />
controlului general în problema poziţionării braţului de cea a orientării mâinii. Întro<br />
asemenea abordare, transformarea totală poate fi rescrisă ca,<br />
T<br />
B<br />
M<br />
T<br />
O<br />
M<br />
T<br />
O<br />
BR<br />
T<br />
BR<br />
M<br />
absolut, sistemul O, iar<br />
, unde s-a considerat baza robotului ca sistem de referinţă<br />
T BR<br />
O şi<br />
BR<br />
T M desemnează transformările ce definesc<br />
poziţionarea braţului robotului faţă de baza şi respectiv mâna robotului în raport cu<br />
braţul [24]. De exemplu, pentru robotul discutat mai sus, această partajare a<br />
transformărilor impune următoarea rescriere a relaţiei (2.19)<br />
A<br />
A A A<br />
A <br />
TM O 1 2 3 4 5 A6<br />
(2.32)<br />
unde prima submulţime desemnează poziţionarea braţului,<br />
O<br />
, <br />
T<br />
O<br />
TM<br />
A1 A2<br />
A3<br />
A123<br />
1 2,<br />
3 3<br />
iar a doua orientare,<br />
T BR<br />
M<br />
A<br />
A<br />
A<br />
A<br />
4 5 6 456 4 5 ,<br />
(2.33)<br />
3<br />
, T<br />
Pe de altă parte, atît transformarea globală<br />
(2.34)<br />
6<br />
6<br />
O<br />
T M , cât şi cele parţiale,<br />
3<br />
T 6 , pot fi rescrise în termenii matricei poziţie - orientare (2.10).<br />
O<br />
T 3 şi
Modele geometrice şi cinematice 41<br />
nx<br />
ox<br />
ax<br />
px<br />
<br />
<br />
<br />
O R<br />
P<br />
<br />
ny<br />
o y a y p y<br />
T <br />
M <br />
0 1<br />
nz<br />
oz<br />
az<br />
pz<br />
<br />
<br />
<br />
0 0 0 1 <br />
(2.35)<br />
nbx<br />
obx<br />
abx<br />
pbx<br />
<br />
O O <br />
<br />
O R <br />
<br />
3 P<br />
<br />
n<br />
3 by oby<br />
aby<br />
pby<br />
T <br />
3<br />
<br />
0 1 <br />
nbz<br />
obz<br />
abz<br />
pbz<br />
<br />
<br />
<br />
0 0 0 1 <br />
(2.36)<br />
nMx<br />
oMx<br />
aMx<br />
pMx<br />
<br />
3 3 <br />
<br />
3 R <br />
<br />
6 P<br />
<br />
n<br />
6 My oMy<br />
aMy<br />
pMy<br />
T <br />
6<br />
<br />
0 1 <br />
nMz<br />
oMz<br />
aMz<br />
pMz<br />
<br />
<br />
<br />
0 0 0 1 <br />
(2.37)<br />
Înlocuind expresiile (2.35) - (2.37) in (2.31) rezultă,<br />
O O <br />
3 3 O 3 O 3 O<br />
O R<br />
<br />
<br />
3 P3<br />
R6<br />
P6<br />
R<br />
<br />
<br />
3 R6<br />
R3<br />
R6<br />
P<br />
T<br />
3<br />
3<br />
<br />
<br />
(2.38)<br />
<br />
0 1 <br />
<br />
0 1 <br />
<br />
0 1 <br />
Deci, din (2.35) se obţine,<br />
O<br />
3<br />
R R 3 R 6<br />
(2.39)<br />
O 3 O<br />
P R3 P6<br />
P3<br />
(2.40)<br />
În această ultimă relaţie, vectorul P 6<br />
3 , defineşte poziţia mâinii faţă de<br />
punctul terminal al braţului. Prin multiplicarea cu<br />
de sistemul absolut (figura 2.9, a).<br />
Acest vector va fi deci reprezentat prin<br />
O<br />
O<br />
3<br />
3<br />
R 0 exprimă acelaşi vector faţă<br />
PM R 3 P 6<br />
(2.41)<br />
deci, din (2.40) se obţine<br />
O<br />
M<br />
O<br />
O<br />
M<br />
O<br />
BR<br />
P P P3 P P<br />
(2.42)<br />
sau, astfel spus, translaţia totală este obţinută prin însumarea translaţiilor braţului şi<br />
mîinii. În această relaţie vectorul P M<br />
0 coincide cu versorul a al matricei de<br />
orientare (2.35) (figura 2.4), deci componentele acestui vector pot fi determinate<br />
relativ uşor. Într-o primă fază se determină unghiurile φ şi θ<br />
a y<br />
ax<br />
a<br />
arctan , arctan<br />
ax<br />
az<br />
iar ulterior, componentele vectorului<br />
2<br />
2<br />
y
Modele geometrice şi cinematice 42<br />
z 0 z BR<br />
x B<br />
P M<br />
z BR<br />
a<br />
P M<br />
P k BR az<br />
P y BR<br />
θ<br />
y 0<br />
k ax φ<br />
x x BR<br />
0 a b<br />
k ay<br />
y BR<br />
P<br />
P<br />
Mx<br />
My<br />
P<br />
P<br />
M<br />
M<br />
sin<br />
cos<br />
sin<br />
sin<br />
(2.43)<br />
PMz<br />
PM<br />
cos<br />
Ţinînd cont de faptul că vectorul Ρ este dat prin matricea generală a<br />
robotului (2.35), din (2.42) şi (2.43) se pot calcula componentele vectorului de<br />
poziţie al braţului<br />
O<br />
P BR<br />
PBRx<br />
Px<br />
PMx<br />
<br />
<br />
<br />
<br />
<br />
PBRy<br />
<br />
<br />
<br />
Py<br />
<br />
PM<br />
y<br />
<br />
(2.44)<br />
<br />
PBRz<br />
<br />
<br />
Pz<br />
<br />
<br />
PMz<br />
<br />
Pe de altă parte, din formula (2.34) se obţine,<br />
PBRx<br />
<br />
<br />
P<br />
<br />
BRy <br />
PA123 <br />
1, 23<br />
<br />
(2.45)<br />
<br />
PBRz<br />
<br />
unde P[A] desemnează vectorul de poziţie din transformarea A.<br />
Această ultimă relaţie constituie ecuaţia de bază ce permite calculul<br />
unghiurilor φ 1, φ 2, φ 3 ce definesc articulaţiile braţului.<br />
Pentru calculul unghiurilor mâinii φ 4, φ 5, φ 6 se utilizează componenta de<br />
3<br />
rotaţie R 6 care poate fi exprimată din relaţia (2.39) sub forma,<br />
R<br />
3<br />
6<br />
R<br />
1<br />
0<br />
3<br />
R<br />
Figura 2.9<br />
Cele două matrici R 3<br />
0 şi R sînt uşor obţinute ca matrici de rotaţie din<br />
0<br />
transformările respective. În plus, inversa lui R 3 se calculează conform regulilor<br />
matricelor de orientare. Introducînd aceste rezultate în matricea de orientare a<br />
transformării (2.34), rezultă,
Modele geometrice şi cinematice 43<br />
<br />
1<br />
R3 o <br />
R A456<br />
4 , 5,<br />
<br />
<br />
6<br />
(2.47)<br />
unde R[A] desemnează matricea de orientare a transformării A.<br />
Relaţia (2.47) reprezintă ecuaţia ce permite calculul unghiurilor <br />
4<br />
, 5<br />
, 6<br />
ce definesc poziţia mâinii. Procedura expusă permite deci calculul decuplat al<br />
parametrilor geometrici ai robotului, analizând separat ecuaţiile de poziţie de cele<br />
de orientare. Cu toate că această metodă simplifică şi facilitează, în mare măsură,<br />
efortul de calcul, abordarea analitică a soluţiilor de control cinematic rămâne în<br />
continuare o problemă complexă.<br />
În ciuda dificultăţilor prezentate, controlul cinematic este cea mai utilizată<br />
metodă de control a mişcării unui robot, soluţionare problemei fiind dată, în mod<br />
paradoxal, chiar de robot, de implementarea sa fizică. Conceptul de bază în această<br />
abordare îl constituie faptul că rezolvarea ecuaţiilor (2.30) implică evident<br />
modelarea lor (numerică sau analogică), ori cea mai bună modelare, cea mai<br />
exactă, o reprezintă robotul însuşi. În acest sens, robotul este „forţat” să execute o<br />
anumită traiectorie în spaţiul său de lucru. În punctele prestabilite, dorite, sunt<br />
măsurate valorile variabilelor de control, aceste valori reprezentând soluţiile exacte<br />
ale ecuaţiilor cinetice asociate punctelor respective. Valorile astfel obţinute vor<br />
constitui mărimi de control impuse în faza de operare propriu - zisă a robotului.<br />
Procedura este curent cunoscută sub denumirea de „ instruirea robotului” şi va fi<br />
discutată pe larg într-unul din capitolele ulterioare.<br />
2.4. Controlul cinematic diferenţial<br />
Analiza precedentă s-a axat pe problema determinării variabilelor de control<br />
pe fiecare articulaţie astfel încât comportarea cinematică a întregului braţ, ca<br />
poziţie şi orientare, să fie cea dorită, insistându-se în special asupra cerinţelor de<br />
calcul şi complicaţiilor care derivă din acestea într-o conducere în timp real.<br />
O altă modalitate de tratare a controlului cinematic poate fi obţinută dacă nu<br />
se iau în consideraţie valorile totale ale parametrilor mişcării ci variaţiile acestora<br />
în raport cu anumite mărimi de referinţă. O astfel de abordare este desemnată ca<br />
analiză cinematică diferenţială.<br />
Modelul diferenţial al unui robot este deci un model care permite calculul<br />
diferenţial dx a coordonatelor operaţionale (variabilele ce definesc poziţia în spaţiul<br />
de lucru) în funcţie de diferenţiala dq a coordonatelor generalizate (variabilele<br />
asociate fiecărei articulaţii mecanice). Într-o transpunere analitică, această<br />
dependenţă se poate scrie printr-o matrice iacobian, în forma:<br />
dx j(<br />
q)<br />
dq<br />
(2.48)<br />
Dacă, pentru un anumit model cinematic, coordonatele operaţionale şi<br />
generalizate variază în cantităţi mici, atunci diferenţialele pot fi înlocuite cu<br />
variaţiile corespunzătoare şi modelul (2.48) se scrie sub forma,<br />
x J ( q)<br />
q<br />
(2.49)
Modele geometrice şi cinematice 44<br />
În cazul în care acestor variaţii li se asociază şi variaţii în timp, diferenţialele<br />
pot fi înlocuite cu derivate,<br />
.<br />
.<br />
x J ( q)<br />
q<br />
(2.50)<br />
Indiferent de modul de scriere, într-o analiză diferenţială, o etapă importantă<br />
o constituie calculul matricei iacobiene J(q). Considerând modelele cinematice<br />
stabilite în paragrafele anterioare, redate analitic în forma,<br />
x f (q)<br />
(2.51)<br />
atunci matricea iacobian este matricea derivatelor parţiale ale funcţiei în raport cu<br />
coordonatele generalizate.<br />
f<br />
J ( q)<br />
<br />
(2.52)<br />
q<br />
sau, pe componente<br />
fi<br />
( q)<br />
J .. ( q)<br />
<br />
(2.53)<br />
y qi<br />
Dacă coordonatele operaţionale utilizate sunt date de vectorul,<br />
X <br />
<br />
<br />
Y<br />
<br />
Z <br />
x <br />
(2.54)<br />
<br />
x <br />
<br />
<br />
y<br />
<br />
<br />
z <br />
atunci relaţia (2.50) poate fi scrisă ca,<br />
q1<br />
<br />
<br />
X<br />
X1<br />
X 2 X3<br />
... X n <br />
<br />
q2<br />
<br />
<br />
<br />
<br />
<br />
Y<br />
<br />
Y1<br />
Y2<br />
Y3<br />
... Yn<br />
<br />
q3<br />
<br />
Z<br />
Z1<br />
Z2<br />
Z3<br />
... Zn<br />
<br />
<br />
. <br />
<br />
<br />
(2.55)<br />
<br />
<br />
x 1x<br />
2x<br />
3x<br />
... nx<br />
.<br />
<br />
<br />
<br />
<br />
y 1y<br />
2<br />
y 3y<br />
... ny<br />
. <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
z 1z<br />
2z<br />
3z<br />
... nz<br />
q<br />
<br />
n1<br />
<br />
qn<br />
<br />
unde qi<br />
i<br />
pentru o articulaţie de rotaţie, qi<br />
di<br />
pentru o articulaţie de translaţie<br />
x<br />
<br />
iar Xi<br />
ix <br />
.<br />
qi<br />
qi<br />
Pentru exemplificare, să considerăm robotul cu articulaţii de translaţie<br />
prezentat în figura 2.8. Coordonatele elementului terminal în raport cu sistemul de<br />
referinţă (X 0 , Y 0 , Z 0 ) sunt date de,
Modele geometrice şi cinematice 45<br />
0<br />
X3 a1<br />
0<br />
3 d2<br />
0<br />
Z3 d3<br />
1 , d2,<br />
d<br />
Y (2.56)<br />
unde a 3 exprimă în acelaşi timp şi coordonatele generalizate q 1 , q2,<br />
q3<br />
. În<br />
consecinţă, utilizând o formulă de tipul (2.53) se obţine iacobianul sistemului,<br />
1<br />
0 0<br />
<br />
<br />
0 1 0<br />
<br />
0<br />
0 1<br />
J <br />
(2.57)<br />
0<br />
0 0<br />
0<br />
0 0<br />
<br />
<br />
0 0 0<br />
Pentru sisteme mecanice mari, procedurile de calcul ale matricei, deşi mai<br />
complexe, se bazează pe o tehnică similară sau prin derivate ale celei prezentate în<br />
(5.25).<br />
În forma definită mai sus, iacobianul permite calcului variaţiilor<br />
coordonatelor operaţionale în funcţie de variaţiile coordonatelor generalizate (din<br />
articulaţii).<br />
De fapt, o problemă de conducere impune o procedură inversă: „dându-se<br />
variaţii impuse ale coordonatelor operaţionale se cer variaţiile coordonatelor<br />
generalizate corespunzătoare”. O astfel de formulare conduce la o relaţie de forma,<br />
1<br />
q<br />
J ( q)<br />
x<br />
(2.58)<br />
Calculul inversei iacobianului este în general o problemă complexă,<br />
dificultatea fiind determinată de faptul că matricea iacobian este foarte rar o<br />
matrice pătrată. În general se va impune deci calculul unei pseudoinverse J -1 după<br />
proceduri specifice (38,25,62). De exemplu, pentru iacobianul obţinut mai sus,<br />
x Jq<br />
(2.59)<br />
prin transpunere rezultă<br />
T<br />
T<br />
q<br />
T<br />
x q J<br />
(2.60)<br />
unde admite o pseudoinversă (J T ) -1 de forma<br />
1<br />
0 0 0 0 0<br />
T<br />
J <br />
<br />
<br />
<br />
0 1 0 0 0 0<br />
<br />
(2.61)<br />
<br />
0 0 1 0 0 0<br />
T<br />
admite o pseudoinversă 1<br />
J<br />
de forma
Modele geometrice şi cinematice 46<br />
1<br />
0 0<br />
<br />
<br />
0 1 0<br />
<br />
<br />
T 1<br />
0 0 1<br />
J <br />
(2.62)<br />
0<br />
0 0<br />
0<br />
0 0<br />
<br />
<br />
0 0 0<br />
Se verifică uşor că<br />
T T 1<br />
J J<br />
I<br />
T<br />
Multiplicând cu J<br />
1<br />
T T 1<br />
T T T 1<br />
T<br />
x<br />
J<br />
q<br />
J J<br />
q<br />
ambii membri ai relaţiei (2.60), rezultă<br />
(2.63)<br />
(2.64)<br />
Desigur că această metodă poate fi aplicată numai pentru forme particulare<br />
ale matricei J. Pentru o formă generală a acesteia se poate utiliza procedura<br />
specificată în (12,17). În acest sens, se înmulţesc ambii membrii ai relaţiei (2.59)<br />
cu J T ,<br />
T<br />
T<br />
J x J Jq<br />
(2.65)<br />
Se determină inversa matricei J T J şi prin multiplicarea rezultatului cu (2.65)<br />
se obţine<br />
T 1 T<br />
J<br />
J J x<br />
q<br />
T 1 T<br />
În acest caz J<br />
J J<br />
(2.66)<br />
poate fi definită ca o pseudoinversă a matricei J.<br />
Exemplul pe care l-am analizat se bazează pe o matrice iacobian cu<br />
coeficienţi constanţi. În cele mai multe cazuri, coeficienţii matricei depind de<br />
coordonatele generalizate q i , ceea ce impune o recalculare a elementelor ei la orice<br />
modificare a acestor parametrii.<br />
Calculul variaţilor q i , asociate fiecărei articulaţii a structurii mecanice, pe<br />
baza variaţiilor x i impuse în sistemul operaţional, sugerează introducerea unei<br />
structuri de conducere specifice. În figura 2.10 este prezentat un astfel de sistem.<br />
Traiectoria, în spaţiul de operare al robotului, este dată prin mulţimea de<br />
puncte x di . Aceste valori sunt comparate cu cele realizate efectiv de sistemul<br />
mecanic x i . Parametrii operaţionali reali x i sunt obţinuţi la rândul lor din<br />
coordonatele generalizate q i pe baza modelului cinematic direct (2.51). Abaterile<br />
obţinute,
Modele geometrice şi cinematice 47<br />
x di<br />
-<br />
x i<br />
J -1 (q)<br />
q i<br />
SA<br />
x i<br />
f(q)<br />
q i<br />
Figura 2.10<br />
xi<br />
xdi<br />
xi<br />
(2.67)<br />
sunt aplicate unui bloc de calcul ce implementează pe J -1 (q) la ieşirea căruia se<br />
generează noile variaţii q i ce asigură corectarea traiectoriei. Evident, dependenţa<br />
iacobianului de parametrii q i determină recalcularea sa la fiecare pas de operare.<br />
Avantajul principal al unui astfel de sistem de conducere este dat de<br />
simplitatea legii de conducere utilizate, modelul cinematic diferenţial asociat fiind<br />
un model liniar. Spre deosebire de modelele cinematice propriu-zise prezentate<br />
anterior şi de cele dinamice, care vor fi studiate ulterior, modele caracterizate prin<br />
neliniarităţi deosebit de complexe, modelele diferenţiale oferă avantajul liniarizării.<br />
Din nefericire, acest avantaj este, în mare măsură, anulat de efortul de calcul<br />
cerut, în special pentru calculul inversei matricei iacobiene, calcul ce nu poate fi<br />
realizat off-line datorită dependenţei coeficienţilor matricei de parametrii q i . Cu<br />
toate că în literatură s-au dezvoltat o serie de metode [4,6] care permit calculul<br />
rapid al lui J -1 (q), ele cer, în general, sisteme hardware de mare viteză, cu un preţ<br />
de cost întotdeauna prohibitiv, pentru o operare eficientă în timp real.