NeliniaritÄÈi ale comportamentului materialelor
NeliniaritÄÈi ale comportamentului materialelor
NeliniaritÄÈi ale comportamentului materialelor

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Capitolul 3<br />
NELINIARITĂŢI ALE COMPORTAMENTULUI MATERIALELOR<br />
- I -<br />
3.1. Tipuri de neliniarităţi de material<br />
Multe materi<strong>ale</strong> au un comportament liniar elastic, ceea ce înseamnă că tensiunile<br />
sunt proporţion<strong>ale</strong> cu deformaţiile specifice. Când structura este încărcată până la o valoare<br />
a tensiunii inferioară limitei de curgere şi apoi descărcată, aceasta revine la starea de<br />
referinţă (tensiune şi deformaţie specifică nule). Acest comportament, numit elastic, este<br />
descris de legea lui Hooke în cazul materi<strong>ale</strong>lor cu comportament liniar.<br />
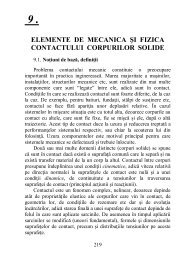
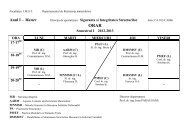
Anumite materi<strong>ale</strong> au un comportament elastic neliniar. De exemplu, cauciucul este<br />
un material al cărui comportament este guvernat de o lege tensiune-deformaţie specifică<br />
prezentată în figura 3.1,a. Se constată că la încărcarea de la starea de referinţă O la o stare<br />
oarecare A tensiunile nu cresc proporţional cu deformaţiile specifice. La descărcare<br />
materialul revine la starea iniţială, urmând aceeaşi curbă.<br />
Există şi materi<strong>ale</strong> care, la descărcare, deşi revin la starea de referinţă, nu parcurg<br />
acelaşi traseu ca la încărcare (Fig.3.1,b). Acest comportament, caracterizat de histerezis,<br />
este asociat unei disipări de energie.<br />
Comportamentul descris în figura 3.1,c este numit elasto-plastic. Plecând din starea<br />
de referinţă O, tensiunea creşte până în starea A, depăşind limita de curgere σ c . Înlăturând<br />
gradual sarcina, se observă că relaţia dintre tensiuni şi deformaţii specifice este liniară<br />
(dreapta AB, par<strong>ale</strong>lă cu curba iniţială). Dacă se aplică din nou sarcina, este parcurs mai<br />
întâi traseul BA.<br />
a) b) c)<br />
Fig.3.1<br />
3.2. Calculul neliniar elastic<br />
Se admit următoarele ipoteze:<br />
<br />
<br />
<br />
<br />
relaţia dintre tensiuni - σ şi deformaţii specifice – ε este neliniară (Fig.3.1,a);<br />
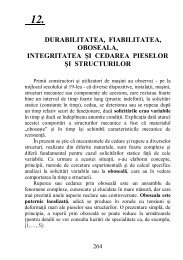
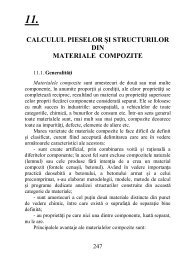
relaţia dintre sarcina P şi deplasarea U este de asemenea neliniară (fig.3.2);<br />
deplasările structurii sunt mici;<br />
structura se consideră un sistem conservativ.
Având în vedere ipotezele de mai sus, rezultă următoarele consecinţe:<br />
• ecuaţiile de echilibru static se exprimă în raport cu poziţia iniţială a structurii;<br />
• rigiditatea structurii depinde de nivelul forţelor exterioare, respectiv de nivelul<br />
eforturilor (este necesar să se definească rigiditatea secantă şi rigiditatea<br />
tangentă a elementelor şi a structurii în ansamblu);<br />
• soluţia problemei se obţine, ca şi în cazul neliniarităţilor geometrice, utilizând<br />
un calcul în cicluri, corectând rigiditatea structurii la începutul fiecărui ciclu pe<br />
baza rezultatelor din ciclul anterior;<br />
• de regulă nu este posibilă suprapunerea de efecte (există unele excepţii, de<br />
exemplu în cazul metodelor increment<strong>ale</strong>, cu condiţia ca forţele să varieze<br />
funcţie de un singur parametru).<br />
Fig.3.2<br />
OBSERVAŢIE: Există diferite expresii analitice care încearcă să aproximeze relaţia<br />
σ-ε pe întreg domeniul de variaţie. Dintre acestea, mai des utilizate sunt următoarele:<br />
Curba exponenţială:<br />
σ<br />
n = E ⋅ ε , (3.1)<br />
unde n este un parametru care poate fi sub- sau supraunitar;<br />
<br />
Curba Ramberg-Osgood (curba celor trei parametri):<br />
⎛ r− 1<br />
σ<br />
⎞<br />
⎜ σ<br />
ε =<br />
⎟<br />
⎜<br />
1 + a<br />
E σ ⎟<br />
,<br />
c<br />
⎝<br />
⎠<br />
(3.2)<br />
<br />
Curba Ylinen<br />
E<br />
⎛ ⎞<br />
= c − ( − c ) c ln σ<br />
ε σ 1 σ<br />
⎜ 1 −<br />
⎟ , (3.3)<br />
⎝ σ c ⎠<br />
În (3.1) şi (3.2) a, r , c şi σ c sunt parametri care definesc curbele.<br />
3.3. Calculul neliniar elasto-plastic<br />
3.3.1. Generalităţi<br />
Cercetările experiment<strong>ale</strong> au pus în evidenţă faptul că în structurile re<strong>ale</strong>, în anumite<br />
secţiuni, tensiunile depăşesc limita de curgere a materialului iar deformaţiile nu mai sunt<br />
elastice.<br />
În general, deformaţiile corpurilor solide sunt compuse dintr-o deformaţie<br />
elastică (reversibilă) şi una remanentă (ireversibilă). În consecinţă, la descărcare<br />
structura revine doar parţial la starea iniţială.<br />
2
Producerea unor astfel de situaţii este determinată de mai mulţi factori, dintre care cei<br />
mai importanţi sunt următorii:<br />
• concentrări de tensiuni în elementele structurii, în special în secţiunile de<br />
îmbinare a acestora;<br />
• erori de execuţie;<br />
• depăşiri <strong>ale</strong> sarcinilor nomin<strong>ale</strong> estimate în calcul;<br />
• încărcări dinamice care nu s-au considerat în calcul;<br />
• cedări în reazeme;<br />
• variaţii de temperatură.<br />
Fenomenul de curgere locală a materialului are ca efect producerea unor degradări<br />
loc<strong>ale</strong> (fisuri, striviri de material, deformaţii mari etc.), situaţii care însă nu au ca efect<br />
pierderea capacităţii portante a structurii. Înseamnă că structurile re<strong>ale</strong> au o rezervă de<br />
rezistenţă în raport cu limitele stabilite prin calculul în domeniul elastic, conferită atât<br />
de configuraţia structurii cât şi de comportarea elasto-plastică a materialului.<br />
Teoria plasticităţii se ocupă cu metodele de calcul al tensiunilor şi al<br />
deformaţiilor corpurilor, după ce o parte a corpului (sau tot corpul) a intrat în curgere.<br />
Este necesar, la fel ca şi în Teoria elasticităţii, să se stabilească ecuaţii de echilibru şi de<br />
compatibilitate a deformaţiilor.<br />
Cea mai dificilă problemă în plasticitate este cea a descrierii condiţiilor la limită în<br />
cazul curgerii plastice atunci când numai o parte a corpului a intrat în curgere, în timp ce<br />
restul corpului are încă deformaţii elastice, deformaţiile plastice şi cele elastice fiind de<br />
acelaşi ordin de mărime. Pentru cazurile când deformaţiile plastice sunt mari în comparaţie<br />
cu cele elastice, interesează în special schimbarea dimensiunilor corpului.<br />
Cercetările privind deformaţiile plastice <strong>ale</strong> structurilor se pot clasifica în trei domenii<br />
diferite:<br />
<br />
<br />
<br />
Studiul deformaţiilor plastice la temperatură constantă, independente de timp. În<br />
acest caz se presupune că deformaţiile se produc instantaneu.<br />
Studiul deformaţiilor plastice la temperaturi ridicate, dependente de timp, care<br />
fac obiectul disciplinei numită reologie. Aici au fost dezvoltate modelele<br />
termoplasticităţii şi viscoplasticităţii. În această categorie sunt incluse şi studiile de<br />
fluaj şi de relaxare a tensiunilor.<br />
Studiul deformaţiilor plastice ţinând seama de viteza de aplicare a sarcinilor<br />
(impact, sarcini explozive, propagarea undelor în medii elasto-plastice), care fac<br />
obiectul Teoriei dinamice a plasticităţii.<br />
Din punct de vedere al aplicaţiilor Teoriei plasticităţii trebuie subliniate două moduri de<br />
abordare a problemelor de deformare elasto-plastică:<br />
1. În cazul proiectării structurilor este necesar să se estimeze sarcina<br />
maximă pe care o poate suporta o structură, fără să existe pericolul<br />
producerii unei curgeri excesive.<br />
2. În cazul proceselor tehnologice de deformare a met<strong>ale</strong>lor este necesar<br />
să se poată modela deformaţii plastice mari, necesare schimbării formei.<br />
Având în vedere aceste aspecte, teoriile plasticităţii se pot împărţi în două categorii:<br />
<br />
Teoria deformaţiilor elasto-plastice, având la bază ecuaţiile care leagă<br />
tensiunile şi deformaţiile specifice;<br />
3
Teoria curgerii plastice, care are la bază ecuaţiile care leagă tensiunile şi<br />
viteza de deformare.<br />
3.3.2. Starea de tensiune şi de deformaţie într-un punct al unui mediu continuu<br />
Teoriile plasticităţii sunt elaborate pe baza noţiunilor de tensiuni princip<strong>ale</strong>,<br />
deformaţii specifice princip<strong>ale</strong> şi viteze princip<strong>ale</strong> de lungire. De aceea este necesar să<br />
se facă o scurtă trecere în revistă a unor elemente fundament<strong>ale</strong> privind starea de tensiune<br />
şi de deformaţie a corpurilor deformabile.<br />
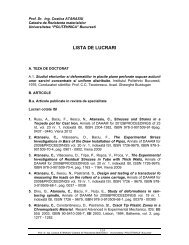
Aşa cum s-a arătat în Cap.1, starea de tensiune dintr-un punct al unui corp (Fig.3.3,a)<br />
poate fi definită de şase componente distincte <strong>ale</strong> tensorului tensiunilor (Fig.3.3,b) care se<br />
pot scrie sub formă unui vector<br />
T<br />
{ σ } = { σ x σ y σ z τ xy τ yz τ zx } . (3.4)<br />
În cazul în care se consideră sistemul principal de axe (direcţiile princip<strong>ale</strong> fiind<br />
norm<strong>ale</strong>le la planele pe care tensiunile tangenţi<strong>ale</strong> sunt nule–Fig.3.3,c), vectorul tensiunilor<br />
devine:<br />
{ σ } T = { σ 1 σ 2 σ 3 0 0 0 } . (3.5)<br />
Tensiunile princip<strong>ale</strong> sunt soluţiile ecuaţiei<br />
3 2<br />
σ − I1σ<br />
+ I2σ<br />
− I3<br />
= 0 , (3.6)<br />
unde I 1 , I 2 , I 3 sunt invarianţii stării spaţi<strong>ale</strong> de tensiune şi au expresiile:<br />
I 1 = σ x + σ y + σ z = σ 1 + σ 2 + σ 3 ;<br />
2 2 2<br />
I 2 = σ xσ<br />
y + σ y σ z + σ z σ x − τ xy − τ yz − τ zx = σ 1σ<br />
2 + σ 2σ<br />
3 + σ 3σ<br />
1 ; (3.7)<br />
σ<br />
σ<br />
x xy xz 1<br />
I 3 = τ xy σ y τ yz = 0 σ 2 0 = σ 1σ<br />
2σ<br />
3 .<br />
τ<br />
xz<br />
τ<br />
τ<br />
yz<br />
τ<br />
σ<br />
z<br />
0<br />
0 0 σ<br />
0<br />
3<br />
a) b) c)<br />
Fig.3.3<br />
Pe lângă tensiunile princip<strong>ale</strong> se definesc şi tensiunile norm<strong>ale</strong> princip<strong>ale</strong> reduse:<br />
si = σ i − σ m ( i = 1 , 2,<br />
3)<br />
(3.8)<br />
unde σ m este tensiunea normală medie<br />
( σ 1 + σ 2 + σ 3 )<br />
σ m =<br />
. (3.9)<br />
3<br />
Este evident că s 1 + s2<br />
+ s3<br />
= 0 .<br />
4
Tensiunile tangenţi<strong>ale</strong> princip<strong>ale</strong> (care acţionează pe plane care conţin fiecare una<br />
din direcţiile princip<strong>ale</strong> şi împart în părţi eg<strong>ale</strong> unghiul dintre celelalte două)<br />
( σ − σ ) ( σ − σ ) ( σ − σ )<br />
τ<br />
2 3<br />
3 1 1 2<br />
1 = ; τ 2 = ; τ 3 =<br />
2<br />
2<br />
2<br />
, (3.10)<br />
sunt legate între ele prin identitatea<br />
τ 1 + τ 2 + τ 3 = 0 . (3.11)<br />
Un rol important în teoria plasticităţii îl are aşa numita intensitate a tensiunilor<br />
tangenţi<strong>ale</strong>:<br />
2 2 2 1 2 2 2 1<br />
2<br />
2<br />
2<br />
( τ 1 + τ 2 + τ 3 ) = ( s1<br />
+ s2<br />
+ 3 ) = [( σ 1 − σ 2 ) + ( σ 2 − σ 3 ) + ( σ 3 − σ 1 ) ]<br />
2<br />
S = s<br />
3<br />
2<br />
6<br />
(3.12)<br />
Starea de deformaţie dintr-un punct al unui corp este determinată dacă se cunosc<br />
cele şase componente <strong>ale</strong> vectorului deformaţiilor specifice (trei deformaţii specifice<br />
liniare şi trei lunecări specifice);<br />
T<br />
{ ε } = { ε x ε y ε z γ xy γ yz γ zx } . (3.13)<br />
Raportat la direcţiile principl<strong>ale</strong>, vectorul deformaţiilor specifice este<br />
{ ε } T = { ε 1 ε 2 ε 3 0 0 0 } . (3.14)<br />
medie<br />
Pe lângă deformaţiile specifice princip<strong>ale</strong> ε 1 , ε 2 , ε 3 se defineşte lungirea specifică<br />
( ε + ε + )<br />
1 2 ε<br />
ε<br />
3<br />
m =<br />
, (3.15)<br />
3<br />
reprezentând 1/3 din deformaţia volumică specifică<br />
∆ V<br />
ε V = = ε 1 + ε 2 + ε 3 . (3.16)<br />
V 0<br />
Analog cu studiul tensiunilor, se pot considera lungirile princip<strong>ale</strong> reduse<br />
ei = ε i − ε m ( i = 1 , 2,<br />
3)<br />
, (3.17)<br />
care satisfac identitatea evidentă<br />
e 1 + e2<br />
+ e3<br />
= 0 . (3.18)<br />
Lunecările specifice princip<strong>ale</strong> sunt:<br />
( ε 2 − ε 3 ) ( ε 3 − ε 1 ) ( ε 1 − ε 2 )<br />
γ 1 = ; γ 2 = ; γ 3 = , (3.20)<br />
2<br />
2<br />
2<br />
care satisfac condiţia<br />
γ 1 + γ 2 + γ 3 = 0 . (3.21)<br />
Intensitatea deformaţiei de lunecare este<br />
2 2 2 1 2 2 2 1 2<br />
2<br />
2<br />
( γ 1 + γ 2 + γ 3 ) = ( e1<br />
+ e2<br />
+ 3 ) = [( ε 1 − ε 2 ) + ( ε 2 − ε 3 ) + ( ε 3 − ε 1 ) ]<br />
2<br />
E = e<br />
3<br />
2<br />
5<br />
6<br />
(3.22)
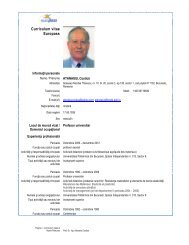
Planul a cărui normală este egal înclinată faţă de direcţiile princip<strong>ale</strong> se<br />
numeşte plan octaedral (Fig.3.4).<br />
Ţinând seama că intre cosinusurile directoare <strong>ale</strong> norm<strong>ale</strong>i la plan (l,m,n) există<br />
1<br />
relaţia 2 2 2<br />
l + m + n = 1 , rezultă valorile cosinusurilor directoare l = m = n = .<br />
3<br />
Fig.3.4<br />
Pe acest plan tensiunea normală şi cea tangenţială au valorile:<br />
- tensiunea normală octaedrală<br />
( σ + σ + σ )<br />
1<br />
σ oct =<br />
= σ<br />
3<br />
- tensiunea tangenţială octaedrală<br />
2<br />
3<br />
2 2 2<br />
( τ + τ + ) S<br />
m ; (3.23)<br />
2 2<br />
τ oct = 1 2 τ 3 = . (3.24)<br />
3<br />
3<br />
6