MATRICELE DE RIGIDITATE ALE ELEMENTELOR FINITE UZUALE ...
MATRICELE DE RIGIDITATE ALE ELEMENTELOR FINITE UZUALE ...
MATRICELE DE RIGIDITATE ALE ELEMENTELOR FINITE UZUALE ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
5.<br />
<strong>MATRICELE</strong> <strong>DE</strong> <strong>RIGIDITATE</strong> <strong>ALE</strong> <strong>ELEMENTELOR</strong> <strong>FINITE</strong> UZU<strong>ALE</strong><br />
– SOLID BRICK, ÎNVELIŞ SHELL ŞI BARE BEAM<br />
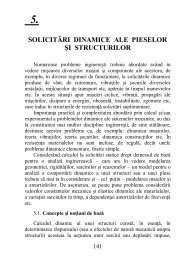
Elementul hexaedral cu opt noduri (BRICK8)<br />
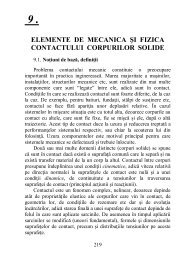
A. Caracteristici principale ale elementului BRICK8 (Fig. 12.1):<br />
1. este element izoparametric, definit de opt noduri I, J, K, L, M, N, O, P care trebuie declarate în<br />
sensul precizat în Fig. 12.1.a;<br />
2. are trei grade de libertate pe nod (GLN = 3), deplasări pe direcŃiile X, Y şi Z (UX, UY, UZ);<br />
3. are forma unui hexaedru oarecare şi poate fi încărcat cu forŃe la noduri;<br />
a<br />
Fig. 12.1: Elementul BRICK8<br />
b<br />
4. elementul se poate folosi pentru modelarea stării 3D de tensiune pentru materiale izotrope şi<br />
orice domeniu de analiză, adică acest element poate fi considerat unul dintre cele mai generale tipuri de<br />
elemente finite. Cu ajutorul acestui element finit se pot analiza toate componentele unei structuri, fie ele<br />
bare, plăci sau blocuri. Totuşi, din considerente ale dimensiunilor foarte mari ale modelelor cu elemente<br />
finite, acest element finit se foloseşte cu precădere pentru modelarea stucturilor considerate blocuri (adică<br />
prezintă cele trei dimensiuni geometrice comparabile);<br />
5. matricea de rigiditate în coordonate globale este:<br />
e<br />
T<br />
⎡<br />
⎣K ⎤<br />
⎦ = ∫ [ B] [ D][ B]<br />
dV , (12.1)<br />
V<br />
în care:<br />
[ B] = [ ∂ ][ N]<br />
; (12.2)<br />
este matricea derivatelor funcŃiilor de formă, iar expresia matricelor de derivare este:<br />
⎡ ∂<br />
⎤<br />
0 0<br />
⎢∂<br />
x<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
[ ∂] = ⎢<br />
⎥ ⋅<br />
⎢<br />
0<br />
0<br />
∂<br />
⎢∂<br />
y<br />
⎢<br />
⎢ 0<br />
⎢<br />
⎢ ∂<br />
⎢<br />
⎣ ∂ z<br />
∂<br />
∂ y<br />
0<br />
∂<br />
∂ x<br />
∂<br />
∂ z<br />
0<br />
0<br />
∂<br />
∂ z<br />
⎥<br />
0<br />
⎥<br />
⎥<br />
∂<br />
⎥<br />
∂ y⎥<br />
∂ ⎥<br />
⎥<br />
∂ x ⎦<br />
(12.3)
FuncŃiile de formă în coordonate naturale sunt:<br />
1<br />
N1<br />
1−<br />
r<br />
8<br />
1−<br />
s 1−<br />
t<br />
1<br />
N2<br />
= 1+<br />
r<br />
8<br />
1−<br />
s 1−<br />
t<br />
1<br />
N3<br />
= 1+<br />
r<br />
8<br />
1+<br />
s 1−<br />
t<br />
1<br />
N4<br />
= 1−<br />
r<br />
8<br />
1+<br />
s 1−<br />
t<br />
N = 1−<br />
r 1+<br />
r<br />
N<br />
9<br />
10<br />
= ( )( )( ) N = ( 1−<br />
r)( 1−<br />
s)( 1+<br />
t)<br />
=<br />
( )( )( )<br />
( )( )( )<br />
( )( )( )<br />
( )( )<br />
( 1−<br />
s)( 1+<br />
s)<br />
( 1−<br />
t)( 1+<br />
t)<br />
N<br />
N<br />
N<br />
5<br />
6<br />
7<br />
8<br />
1<br />
8<br />
1<br />
=<br />
8<br />
1<br />
=<br />
8<br />
1<br />
=<br />
8<br />
( 1+<br />
r)( 1−<br />
s)( 1+<br />
t)<br />
( 1+<br />
r)( 1+<br />
s)( 1+<br />
t)<br />
( 1−<br />
r)( 1+<br />
s)( 1+<br />
t)<br />
(12.4a)<br />
(12.4b)<br />
N11<br />
=<br />
matricea de rigiditate (elasticitate) a materialului [D] este<br />
⎡1<br />
− ν ν ν 0 0 0 ⎤<br />
⎢<br />
⎥<br />
⎢<br />
1−<br />
ν ν 0 0 0<br />
⎥<br />
⎢<br />
1−<br />
ν 0 0 0 ⎥<br />
E<br />
⎢<br />
1<br />
⎥<br />
[ D ] =<br />
⎢<br />
− ν 0 0 ⎥ (12.5)<br />
( 1+<br />
ν)( 1−<br />
2ν)<br />
⎢<br />
2<br />
⎥<br />
⎢<br />
1<br />
Si me tric<br />
− ν 0 ⎥<br />
⎢<br />
2 ⎥<br />
⎢<br />
1 ⎥<br />
⎢<br />
− ν⎥<br />
⎣<br />
2 ⎦<br />
6. uzual elementul este denumit BRICK8.<br />
B. Date legate de element<br />
1. tipul elementului finit, adică pentru obŃinerea matricei de rigiditate se pot folosi funcŃiile de<br />
formă (12.4a), sau, pentru creşterea preciziei, se pot folosi şi funcŃiile de formă (12.4b), caz în care înainte<br />
de asamblare matricea de rigiditate a elementului se “condensează” la gradele de libertate corespunzătoare<br />
celor opt noduri;<br />
2. ordinul de integrare al matricei de rigiditate al elementului, INT (pentru programe de firmă se<br />
alege automat 2, 3 sau 4);<br />
C. Date despre materialul elementului<br />
1. modulul de elasticitate longitudinal - E;<br />
2. coeficientul lui Poisson - niu;<br />
(3). coeficientul de dilatare termică - α;<br />
(4). densitatea materialului -<strong>DE</strong>NS;<br />
(5). acceleraŃia gravitatională - g sau greutatea specifică - γ = ρg.<br />
D. Date despre încărcări<br />
1. blocaje la translaŃie în direcŃia X – BX, şi în direcŃia Y – BY şi în direcŃia Z - BZ;<br />
2. forŃe la noduri în direcŃia X – FX, Y - FY şi Z - FZ;<br />
(3). deplasări impuse pe orice direcŃie;<br />
(4). temperaturi în noduri sau în elemente;<br />
(5). forŃe de inerŃie generate de câmpul gravitaŃional (pentru care sunt necesare ca date de intrare<br />
ρ, g direcŃia şi sensul gravitaŃiei), sau generate de mişcarea de rotaŃie uniformă (pentru care trebuie<br />
precizate axa de rotaŃie şi viteza unghiulară ω);
(6) presiuni distribuite liniar sau constante pe feŃele elementului, care se identifică prin numere de<br />
la 1 la 6 (vezi Fig. 12.1.a). Aceste presiuni (sau forŃe distribuite liniar) se echivalează la nodurile<br />
elementului cu forŃe concentrate (vezi Fig. 8.2 pentru care se neglijează momentele);<br />
E. Rezultatele analizei<br />
1. deplasările nodale - UX, UY şi UZ (notate şi DX, DY şi DZ);<br />
2. tensiunile în sistemul global de axe - SX, SY, SZ, SXY SYZ, SXZ, adică tensorul complet al<br />
tensiunilor la nodurile elementului, precum şi în centrul lui, tensiunile principale S1, S2, S3 şi unghiurile<br />
corespunzătoare de orientare (vezi Fig. 12.1.b, în care s-au figurat doar tensiunile normale).<br />
Tensiunile într-un nod comun mai multor elemente nu rezultă egale. Pentru corectarea rezultatelor,<br />
de obicei, se recurge la medierea tensiunilor în noduri folosind diverse metode, cea mai simplă mediere<br />
fără a Ńine seama de volumele elementelor vecine este inclusă în programul de calcul (vezi relaŃia 9.16.a).<br />
Tensiunile dintr-un punct P al elementului se determină cu relaŃia:<br />
⎧ SX ⎫<br />
⎪<br />
SY<br />
⎪<br />
⎪ ⎪<br />
⎪ SZ ⎪<br />
⎨ ⎬ = [ D][ B ]{ e<br />
P<br />
U }. (12.6)<br />
⎪SXY⎪<br />
⎪SYZ⎪<br />
⎪ ⎪<br />
⎩SXZ<br />
⎭<br />
Se menŃionează că pentru calculul tensiunilor în general se foloseşte altă tehnică: tensiunile se<br />
determină în punctele Gauss 2 × 2×<br />
2 (unde se demonstrează că erorile de calcul a tensiunilor sunt<br />
minime) şi apoi acestea se expandează la noduri folosind funcŃiile de formă 12.4a. Pentru elemente<br />
hexaedrice puŃin distorsionate, adică apropiate de un cub, practic tensiunile determinate direct în noduri<br />
coincid cu cele expandate din punctele Gauss. DiferenŃe mai mari apar pentru elementele finite care<br />
folosesc funcŃii de formă suplimentare (12.4b). Programul dispune de alegerea modului în care se<br />
calculează tensiunile pe elemente.<br />
Tensiunile principale în noduri se pot calcula odată cu calculul tensiunilor în elemente sau<br />
tensiunile componente ale tensorului tensiune se pot media la noduri şi apoi se pot calcula tensiunile<br />
principale S1 > S2 > S3 în noduri. Programul mediază tensiunile componente şi apoi calculează tensiunile<br />
principale.<br />
Tensiunea echivalenta, von Mises - Sech se determina cu relatia (9.18.)<br />
(3). deformaŃiile specifice din element, într-un punct P se calculeaza cu relaŃia:<br />
{ } [ B ]{ e<br />
P<br />
U }<br />
ε = (12.7)<br />
(4). reactiunile din legaturile cu exteriorul.<br />
1. Date generale despre discretizare<br />
NN NE<br />
2. Date despre materiale<br />
NMAT<br />
MATI E niu<br />
...<br />
3. Date despre proprietăŃile elementelor<br />
NPROP<br />
PROPI TIPE INT<br />
...<br />
4. Date despre noduri<br />
NI BX BY BZ X Y Z<br />
...<br />
5. Date despre elemente<br />
EI I J K L M N O P MAT PROP
...<br />
6. Date despre încărcări cu forŃe în noduri<br />
NF<br />
NIF FX FY FZ<br />
...<br />
G. Programul de lucru<br />
BRICK8.EXE<br />
Acest program a fost conceput să lucreze cu noŃiunile (datele) de la punctele B-E neincluse între<br />
paranteze.<br />
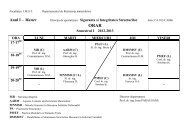
Elementul shell cu opt noduri (SHELL8)<br />
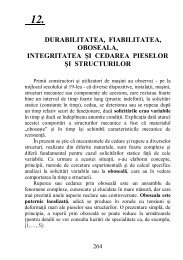
A. Caracteristici principale ale elementului SHELL8 (Fig. 13.1):<br />
1. este definit de opt noduri I, J, K, L, M, N, O, P care trebuie declarate conform figurii 13.1 şi<br />
prezintă o formulare izoparametrică;<br />
2. are şase grade de libertate pe nod (GLN = 6), deplasări pe direcŃiile X, Y şi Z (UX, UY, UZ) şi<br />
rotiri în jurul axelor X, Y, Z (RotX, RotY, RotZ) aşa cum se prezintă în figura 13.2;<br />
3. are forma unui patrulater plan oarecare - conŃinut în planul xy al sistemului de referinŃă local –<br />
legat de element, are grosimea constantă t, laturile pot fi drepte sau curbe. Elementul poate fi încărcat cu<br />
forŃe şi momente în noduri – raportate la sistemul de referinŃă global XYZ, precum şi cu presiuni normale<br />
pe cele şase feŃe marcate cu 1-6.<br />
Fig. 13.1: Elementul SHELL8<br />
Fig. 13.2: Gradele de libertate şi încărcările nodale ale elementului SHELL8<br />
Presiunile se consideră pozitive dacă “intră” în element. Formularea teoretică a elementului<br />
consideră suprafaŃa mediană (“Middle surface”) perfect plană, deci abaterile de la planeitate introduc erori<br />
în formularea matricei de rigiditate. FaŃa pozitivă (obŃinută prin regula şurubului drept aplicată<br />
numerotării I – J – K - L) poartă denumirea de faŃă superioară sau “Top” iar faŃa negativă poartă<br />
denumirea de faŃă inferioară sau “Bottom”;<br />
4. elementul se poate folosi pentru modelarea învelişurilor şi plăcilor de grosime constantă pe<br />
porŃiuni, adică din componenŃa unor structuri preponderent realizate din table, considerate materiale<br />
izotrope;
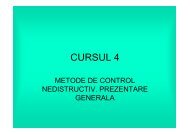
5. matricea de rigiditate în coordonate locale se obŃine prin suprapunerea matricei de rigiditate de<br />
membrană cu matricea de rigiditate de placă (încovoiere) ca în figura 13.3. Se menŃionează că formularea<br />
matricei de rigiditate membrană nu conŃine gradele de libertate ϕ<br />
z<br />
(“drilling” = de sfredelire) acestea fiind<br />
introduse într-un mod aproximativ prin intermediul matricei [k t ]. Matricea de rigiditate a elementului în<br />
coordonate locale se poate scrie simbolic<br />
⎡[ k ] [ ] [ ] ⎧ ⎫<br />
m<br />
0 0 ⎤ ui<br />
⎢16×<br />
16 16×<br />
8 16×<br />
24⎥⎪<br />
⎪<br />
⎪<br />
vi<br />
⎢<br />
⎥ ⎪<br />
⎢<br />
⎪ ⎪<br />
[ ] { } [ ] [ ] [ ] ⎥ zi<br />
k u = 0 kt<br />
0<br />
ϕ<br />
⎢<br />
⎥⎨<br />
⎬ , (13.1)<br />
8×<br />
16 × 8×<br />
24<br />
48×<br />
48<br />
8 8<br />
48×<br />
1<br />
⎢<br />
⎥⎪<br />
wi<br />
⎪<br />
⎢<br />
⎥⎪ϕ<br />
⎪<br />
xi<br />
⎢ [ 0] [ 0] [ k<br />
p<br />
] ⎥⎪<br />
⎪<br />
⎣24×<br />
16 24×<br />
8 24×<br />
24⎦<br />
⎩ϕ<br />
yi<br />
⎭<br />
în care = { u u u } T<br />
ş.a.m.d. sunt gradele de libertate nodale în sistemul de referinŃă local xyz.<br />
ui<br />
1 2<br />
⋯<br />
8<br />
Element Membrană + Element Placă = Element Shell<br />
Fig. 13.3: Formarea elementului plan Shell8<br />
Cele trei matrice nenule din (13.1) se obŃin din relaŃiile:<br />
T<br />
k B D B dV , (13.2)<br />
B şi [<br />
p<br />
]<br />
D şi [ ]<br />
în care [<br />
m<br />
]<br />
deplasărilor. [<br />
m<br />
]<br />
[<br />
m<br />
] = ∫ V<br />
[<br />
m] [<br />
m][ m]<br />
⎡1<br />
β β β β β β β ⎤<br />
⎢<br />
⎥<br />
⎢<br />
β 1 β β β β β β<br />
⎥<br />
⎢β<br />
β 1 β β β β β ⎥<br />
⎢<br />
⎥<br />
= ⎢β<br />
β β 1 β β β β<br />
k ⎥<br />
t<br />
αEV<br />
, (13.3)<br />
⎢β<br />
β β β 1 β β β ⎥<br />
⎢<br />
⎥<br />
⎢β<br />
β β β β 1 β β ⎥<br />
⎢β<br />
β β β β β 1 β ⎥<br />
⎢<br />
⎥<br />
⎢⎣<br />
β β β β β β β 1 ⎥⎦<br />
T<br />
k B D B dV , (13.4)<br />
[ ]<br />
[<br />
p<br />
] = ∫ V<br />
[<br />
p<br />
] [<br />
p<br />
][<br />
p<br />
]<br />
B se obŃin prin derivarea funcŃilor de formă, având în vedere aproximaŃiile câmpului<br />
D sunt matricele de rigiditate ale materialului, prezentate mai jos, iar E este<br />
p<br />
modulul de elasticitate longitudinal, V este volumul elementului finit,<br />
0,003. Matricea [ ] t<br />
k a fost aleasă astfel încât să înlăture singularitatea matricei [ ]<br />
1<br />
β = − , iar coeficientul α s-a ales<br />
7<br />
k şi să poată reprezenta<br />
mişcările de corp rigid relativ la gradele de libertate rotiri normale la elementul finit.<br />
FuncŃiile de formă sunt definite în coordonate naturale ξ şi η:<br />
1<br />
1 2<br />
N 1<br />
= − ( 1− ξ) ( 1− η) ( 1+ ξ + η)<br />
; N5 = ( 1− ξ )( 1− η)<br />
;<br />
4<br />
2<br />
1<br />
1<br />
2<br />
N 2<br />
= − ( 1+ ξ) ( 1− η) ( 1− ξ + η)<br />
; N6 = ( 1+ ξ) ( 1−<br />
η ) ;<br />
4<br />
2<br />
(13.5)
1<br />
4<br />
1<br />
= − 1− ξ<br />
4<br />
1+ η 1+ ξ − η<br />
1<br />
2<br />
1<br />
2<br />
= 1− ξ − η .<br />
2<br />
2<br />
N 3<br />
= − ( 1+ ξ) ( 1+ η) ( 1− ξ − η)<br />
; N = ( 1− ξ )( 1+ η)<br />
7<br />
;<br />
N 4<br />
( ) ( ) ( ); N ( ) ( )<br />
8<br />
1<br />
Matricele de rigiditate (elasticitate) ale materialului sunt<br />
⎡ E νE<br />
0 0 0 ⎤<br />
⎢<br />
⎥<br />
⎡ ⎤<br />
⎢<br />
1 ν 0<br />
⎢<br />
νE<br />
E 0 0 0<br />
⎥<br />
E<br />
⎥ ⎢ 0 0 G 0 0 ⎥<br />
[ D m<br />
] = ⎢ν<br />
1 0 ⎥ ; [ D ]<br />
2<br />
p<br />
= ⎢ G ⎥ , (13.6)<br />
1−ν<br />
⎢ 1−ν<br />
⎥<br />
⎢0<br />
0<br />
⎢ 0 0 0 0 ⎥<br />
⎣ 2<br />
⎥<br />
κ<br />
⎦ ⎢<br />
G<br />
⎥<br />
⎢ 0 0 0 0 ⎥<br />
⎣<br />
κ ⎦<br />
E<br />
în care G = este modulul de elasticitate transversal al materialului; ν este coeficientul lui<br />
2 1+ν<br />
( )<br />
⎛ A ⎞<br />
Poisson iar κ = max⎜1,2;1<br />
+ 0,2 ⎟ este un coeficient de corecŃie pentru distribuŃia parabolică a<br />
2<br />
⎝ 25t<br />
⎠<br />
tensiunilor de forfecare care se consideră constantă pe grosimea elementului; A este aria elementului<br />
finit.<br />
Aproximarea câmpului deplasărilor în interiorul elementelor finite pentru deplasările de<br />
membrană, respectiv placă se face cu relaŃiile:<br />
⎧u<br />
⎫ ⎡ 0 0 zN ⎧ ⎫<br />
⎧u 8<br />
i ⎤ w<br />
8<br />
i<br />
⎫ ⎡Ni<br />
0 ⎤⎧ui<br />
⎫ ⎪ ⎪<br />
⎨ ⎬ = ∑ ⎢ ⎥⎨<br />
⎬ ;<br />
⎢<br />
⎥⎪<br />
⎪<br />
⎨v<br />
⎬ = ∑<br />
⎨ ⎬<br />
⎩v⎭<br />
i= 1 ⎣ 0 Ni<br />
⎦⎩v<br />
⎢<br />
0 − zNi<br />
0<br />
⎥<br />
ϕ<br />
xi<br />
. (13.7)<br />
i ⎭ ⎪ ⎪ i=<br />
1<br />
⎢<br />
⎥⎪<br />
⎪<br />
⎩w⎭<br />
⎣Ni<br />
0 0 ⎦⎩ϕ<br />
yi ⎭<br />
Deoarece funcŃiile de formă sunt definite în coordonate naturale, derivarea în raport cu<br />
coordonatele x şi y implică folosirea derivatelor funcŃiilor compuse şi deci calculul inversei Jacobianului<br />
[J]. Dacă se folosesc notaŃiile<br />
⎧ ∗<br />
∂Ni<br />
∗<br />
∂Ni<br />
∗ ∗<br />
−1<br />
⎡J11<br />
J12<br />
⎤<br />
⎪<br />
ai<br />
= J11<br />
+ J12<br />
∂ξ<br />
∂η<br />
[ J ] = ⎢ ∗ ∗ ⎥ ; ⎨<br />
, (13.8)<br />
⎣J<br />
21<br />
J<br />
22 ⎦ ⎪ ∗<br />
∂N<br />
i ∗<br />
∂Ni<br />
bi<br />
= J 21 + J22<br />
⎪⎩<br />
∂ξ<br />
∂η<br />
atunci matricele derivatelor funcŃiilor de formă rezultă din<br />
⎧ε<br />
⎫<br />
x ⎡a<br />
8 i<br />
0 ⎤<br />
⎪ ⎪<br />
{ }<br />
⎢<br />
0<br />
⎥⎧ui<br />
⎫<br />
ε<br />
m<br />
= ⎨ε<br />
y ⎬ = ∑⎢<br />
bi<br />
⎥⎨<br />
⎬ = [ Bm<br />
]{ dm}<br />
; (13.9a)<br />
⎪ ⎪ i=<br />
1 ⎩vi<br />
⎭ 3×<br />
16 16×<br />
1<br />
⎩γ<br />
⎭<br />
⎢⎣<br />
⎥<br />
xy<br />
bi<br />
ai<br />
⎦<br />
⎧ε<br />
x ⎫ ⎡ 0 0 zai<br />
⎤<br />
⎪ ⎪ ⎢<br />
0 0<br />
⎥<br />
⎧ ⎫<br />
8 ⎢<br />
−<br />
⎪<br />
ε<br />
y<br />
⎪<br />
zbi<br />
⎥<br />
wi<br />
⎪ ⎪<br />
{ ε } ⎢ 0 ⎥<br />
p<br />
= ⎨γ<br />
xy ⎬ = ∑ − zai<br />
zbi<br />
⎨ϕ<br />
xi ⎬ = [ Bp<br />
]{ d<br />
p}<br />
, (13.9b)<br />
⎪ ⎪ i=<br />
1 ⎢ ⎥<br />
5×<br />
24 24×<br />
1<br />
γ<br />
0 ⎪ ⎪<br />
yz ⎢bi<br />
− Ni<br />
⎪ ⎪<br />
⎥⎩ϕ<br />
yi ⎭<br />
⎪⎩<br />
γ ⎪⎭<br />
⎢<br />
⎣ 0 ⎥<br />
xz<br />
ai<br />
Ni<br />
⎦<br />
d sunt componentele vectorilor deplasare în coordonate locale.<br />
în care { }<br />
m<br />
d şi { }<br />
p<br />
Integralele (13.2) şi (13.4) se transformă în integrale de suprafaŃă deoarece integrarea pe direcŃia z<br />
(grosimea plăcii) se face fără dificultăŃi analitic. Totuşi integralele de suprafaŃă în coordonate naturale se<br />
efectuează numeric folosind integrarea Gauss-Legendre în minim 2× 2 puncte Gauss.
Odată cunoscută matricea de rigiditate în coordonate locale se poate determina matricea de<br />
rigiditate a elementului în coordonate globale folosind relaŃia de transformare<br />
e T<br />
K = T k T , (13.10)<br />
[ ] [ ] [ ] [ ]<br />
48 × 48 48×<br />
48 48×<br />
48 48×<br />
48<br />
în care matricea de transformare [ T ] este funcŃie de matricea [ ]<br />
două sisteme de referinŃă local-global<br />
λ a cosinusurilor directoare dintre cele<br />
⎡l1<br />
m1<br />
n1<br />
⎤<br />
[ T ] = diag[ λ ]<br />
i=1 ,2,…,<br />
16<br />
; [ λ ] =<br />
⎢ ⎥<br />
⎢<br />
l2<br />
m2<br />
n2⎥<br />
(13.11)<br />
⎢⎣<br />
l ⎥<br />
3<br />
m3<br />
n3<br />
⎦<br />
6. în această lucrare elementul este denumit SHELL8 deşi în unele programe de firmă formulările,<br />
respectiv denumirea poate fi alta.<br />
B. Date legate de element<br />
1. grosimea elementului finit t, pentru un element Shell în alte dezvoltări şi implementări este<br />
posibil a defini grosimi diferite în cele patru noduri I, J, K, L;<br />
2. ordinul de integrare pentru calculul numeric al matricei de rigiditate cu cele două componente<br />
membrană şi placă, INTM şi INTP care de regulă se aleg 2, (pentru programe de firmă se alege automat 2<br />
sau 3 sau se recurge la tehnici speciale de integrare);<br />
C. Date despre materialul elementului<br />
1. modulul de elasticitate longitudinal - E;<br />
2. coeficientul lui Poisson - niu;<br />
(3). coeficientul de dilatare termică - α;<br />
(4). densitatea materialului -<strong>DE</strong>NS;<br />
(5). acceleraŃia gravitatională - g sau greutatea specifică - γ = ρg.<br />
D. Date despre încărcări<br />
1. deplasări şi rotiri impuse nule în sistemul global de coordonate (sau blocaje) la translaŃie BX,<br />
BY, BZ şi rotaŃie BXX, BYY, BZZ;<br />
2. forŃe la noduri în direcŃia X – FX, Y - FY şi Z – FZ precum şi momente în jurul axelor X – MX,<br />
Y – MY, Z – MZ;<br />
3. presiuni distribuite liniar (biliniar) sau constante pe feŃele elementului, care se identifică prin<br />
numere de la 1 la 6 (vezi Fig. 13.1). Aceste presiuni se echivalează numeric la nodurile elementului cu<br />
forŃe concentrate conform relaŃiei<br />
T<br />
e<br />
{ F } ∫ [ N ] { p}dA<br />
A<br />
= . (13.12)<br />
Se menŃionează că această echivalare (coerentă funcŃiilor de formă) conduce la ditribuŃii de forŃe nodale<br />
care aparent par “bizare”. Spre exemplu echivalarea unor presiuni constante pe un element dreptunghiular<br />
se prezintă în Fig. 13.4;<br />
(4). deplasări impuse pe orice direcŃie;<br />
(5). temperaturi în noduri sau în elemente;<br />
(6). forŃe de inerŃie generate de mişcarea accelerată (sau câmpul gravitaŃional g), pentru care sunt<br />
necesare ca date de intrare ρ, g direcŃia şi sensul acceleraŃiei, sau generate de mişcarea de rotaŃie uniformă,<br />
pentru care trebuie precizate axa de rotaŃie şi viteza unghiulară ω;
Fig. 13.4: Echivalarea presiunilor pe un element Shell8 dreptunghiular<br />
E. Rezultatele analizei<br />
1. deplasările nodale - UX, UY, UZ (notate uneori DX, DY şi DZ) şi rotirile RX, RY, RZ (notate<br />
şi RotX, RotY, RotZ);<br />
2. tensiunile în sistemul global de axe - SX, SY, SZ, SXY SYZ, SXZ, adică tensorul complet al<br />
tensiunilor la nodurile elementului, precum şi în centrul lui pentru feŃele Top, Middle şi Bottom, tensiunile<br />
principale S1, S2, S3 şi unghiurile corespunzătoare de orientare – cosinusurile directoare.<br />
Tensiunile într-un nod comun mai multor elemente nu rezultă egale. Pentru corectarea rezultatelor,<br />
de obicei, se recurge la medierea tensiunilor în noduri folosind diverse metode, cea mai simplă mediere<br />
fără a Ńine seama de volumele elementelor vecine este inclusă în programul de calcul (vezi relaŃia 9.16.a).<br />
Tensiunile dintr-un punct oarecare (de coordonate ξ , η şi z) al elementului se determină mai întâi<br />
în sistemul de coordonate local pentru cele două componente de membrană şi placă (vezi Fig. 13.5) cu<br />
relaŃiile:<br />
T<br />
{ σ<br />
m} = { σ<br />
x<br />
σ<br />
y<br />
τ<br />
xy} = [ Dm<br />
]{ ε<br />
m}<br />
; (13.13a)<br />
T<br />
{ σ<br />
p} { σ<br />
x<br />
σ<br />
y<br />
τ<br />
xy<br />
τ<br />
yz<br />
τ<br />
xz} = [ D p<br />
]{ ε p<br />
}<br />
ε şi { p<br />
}<br />
d şi { p<br />
}<br />
sistemului de ecuaŃii) în deplasări locale { u e } = [ T ]{ U e }. Vectorii { d<br />
m}<br />
şi { p<br />
}<br />
vectorului { u e }.<br />
în care {<br />
m}<br />
locale {<br />
m}<br />
= , (13.13a)<br />
ε se determină cu relaŃiile (13.9) în care vectorii deplasărilor nodale în coordonate<br />
d se obŃin prin transformarea deplasărilor globale (care sunt obŃinute prin rezolvarea<br />
d sunt componente ale<br />
a) Tensiuni de membrană b) Tensiuni de “placă”<br />
Fig. 13.5: Componentele tensiunilor locale ( în sistemul de referinŃă al elementului) pentru elementul SHELL8<br />
obŃinute conform formulării teoretice<br />
Tensiunile totale în coordonate locale se obŃin prin suprapunere de efecte, adică { σ } = { } + { }<br />
σ m σ p<br />
în care adunarea se face pe componente. De obicei tensiunile se calculează într-un număr limitat de puncte
(nodurile elementului şi centrul său) alese de pe feŃele “Top”, “Middle” şi “Bottom”. Se observă că din<br />
calcul tensiunile σ<br />
z<br />
sunt nule, iar pentru corecŃie în faza de postprocesare programul atribuie σ<br />
z<br />
= − p pe<br />
faŃa în care există presiune aplicată cu variaŃie liniară la zero pe faŃa opusă dar numai pentru feŃele 1 şi 2.<br />
Tensiunile locale dintr-un punct sunt transformate în tensiuni globale (în sistemul de referinŃă<br />
global) folosind relaŃia<br />
2 2 2<br />
⎧ SX ⎫ ⎡ l1<br />
m1<br />
n1<br />
l1m1<br />
m1n1<br />
n1l<br />
1 ⎤ ⎧σ<br />
x ⎫<br />
⎪ ⎪ ⎢ 2 2 2<br />
⎥ ⎪ ⎪<br />
⎪<br />
SY<br />
⎪ ⎢<br />
l<br />
2<br />
m2<br />
n2<br />
l<br />
2m2<br />
m2n2<br />
n2l<br />
2 ⎥ ⎪<br />
σ<br />
y<br />
⎪<br />
⎪ ⎪ ⎢<br />
2 2 2<br />
SZ l<br />
⎥ ⎪ ⎪<br />
3<br />
m3<br />
n3<br />
l<br />
3m3<br />
m3n3<br />
n3l<br />
3<br />
σ<br />
z<br />
⎨ ⎬ = ⎢<br />
⎥ ⎨ ⎬<br />
(13.14)<br />
⎪SXY<br />
⎪ ⎢2l1l<br />
2<br />
2m1m<br />
2<br />
2n1n2<br />
l1m2<br />
+ l<br />
2m1<br />
m1n2<br />
+ m2n1<br />
n1l<br />
2<br />
+ n2l1<br />
⎥ ⎪τ<br />
xy ⎪<br />
⎪SYZ<br />
⎪ ⎢2l<br />
m m n n m + m m n + m n n + n ⎥ ⎪τ<br />
⎪<br />
2l<br />
3<br />
2<br />
2 3<br />
2<br />
2 3<br />
l<br />
2 3<br />
l<br />
3 2 2 3 3 2 2l<br />
3 3l<br />
2 yz<br />
⎪ ⎪ ⎢<br />
⎥ ⎪ ⎪<br />
⎩SXZ<br />
⎭ ⎢⎣<br />
2l<br />
m m n n m + m m n + m n n + n ⎥⎦<br />
⎩τ<br />
xz<br />
3l1<br />
2<br />
3 1<br />
2<br />
3 1<br />
l<br />
3 1<br />
l1<br />
3 3 1 1 3 3l1<br />
1l<br />
3 ⎭<br />
Pentru creşterea preciziei tensiunile se determină de regulă în punctele Gauss 2 × 2 (unde valorile<br />
sunt cel mai bine estimate) şi apoi acestea se expandează la noduri folosind funcŃiile de formă 9.14.<br />
Programul dispune de alegerea modului în care se calculează tensiunile pe elemente: direct în nodurile<br />
elementului sau în punctele Gauss din care mai apoi tensiunile se expandează la noduri.<br />
Tensiunile principale în noduri se pot calcula odată cu calculul tensiunilor în elemente sau<br />
tensiunile componente ale tensorului tensiune se pot media la noduri şi apoi se pot calcula tensiunile<br />
principale S1 > S2 > S3 în noduri. Programul mediază tensiunile componente şi apoi calculează tensiunile<br />
principale.<br />
Tensiunea echivalenta, von Mises - Sech se determina cu relatia (9.18.)<br />
(3). deformaŃiile specifice din element în coordonate locale, într-un punct oarecare se calculeaza<br />
cu relaŃiile (13.9) şi apoi se pot transforma similar tensiunilor, dar programul sare această etapă pentru a<br />
reduce volumul rezultatelor.<br />
(4). reactiunile din legaturile cu exteriorul.<br />
F. Structura fişierului cu date de intrare este:<br />
1. Date generale despre discretizare<br />
NN NE<br />
2. Date despre materiale<br />
NMAT<br />
MATI E niu<br />
...<br />
3. Date despre proprietăŃile elementelor<br />
NPROP<br />
PROPI t INTM INTP<br />
...<br />
4. Date despre noduri<br />
NI BX BY BZ BXX BYY BZZ X Y Z<br />
...<br />
5. Date despre elemente<br />
EI I J K L M N O P MAT PROP<br />
...<br />
6. Date despre încărcări cu forŃe în noduri<br />
NF<br />
NIF FX FY FZ MX MY MZ<br />
...<br />
7. Date despre încărcări cu presiuni pe elemente<br />
NEP<br />
EIP FATA P1 P2 P3 P4<br />
...<br />
T
G. Programul de lucru<br />
SHELL8w_re.EXE<br />
Acest program a fost conceput să lucreze cu noŃiunile (datele) de la punctele B-E neincluse între<br />
paranteze.<br />
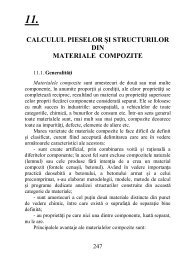
Elementul finit “Beam3D”<br />
Se consideră un element finit de tip grindă, de secŃiune oarecare, dar constantă pe lungime<br />
(Fig. 1.1). Acesta este definit de două noduri de capăt I şi J în care se introduc cele şase componente ale<br />
deplasărilor (deplasări şi rotiri) drept grade de libertate şi un nod de orientare K, care precizează direcŃia<br />
principală a secŃiunii y. Axa barei x, este definită de la nodul I la nodul J, iar axa principală z a secŃiunii se<br />
obŃine considerând sistemul de referinŃă cartezian drept. Celor şase grade de libertate din fiecare nod,<br />
ordonate UX, UY, UZ, RX, RY şi RZ le corespund forŃele şi momentele nodale FX, FY, FZ, MX, MY şi<br />
MZ. În sistemul de referinŃă local xyz se definesc eforturile la nivelul elementului N, Ty, Tz, Mt, My şi<br />
Mz, pozitive atunci când respectă sensurile din Fig. 1.1.<br />
Elementul finit grindă are contribuŃii la ecuaŃia de mişcare a structurii în matricea de rigiditate şi<br />
de masă. Formularea generală a elementului, pentru calculul matricei de rigiditate corespunde grinzii<br />
Timoshenko, dar poate fi redusă şi la formularea Euler-Bernoulli, prin intermediul parametrului TipK.<br />
Pentru fiecare element de tip grindă, se precizează, prin intermediul unui set de proprietăŃi asociat<br />
secŃiunii respective, aria secŃiunii A (A), momentele de inerŃie principale I<br />
y<br />
= Iy şi I<br />
z<br />
= Iz şi momentul<br />
convenŃional la răsucire I<br />
t<br />
= It precum şi coeficienŃii de forfecare φ<br />
y<br />
= Fiy şi φ<br />
z<br />
= Fiz. Coeficientul de<br />
forfecare este definit ca raportul dintre aria totală şi aria de forfecare, deci are valori supraunitare spre<br />
deosebire de inversul lui – factorul de forfecare, care este subunitar. Din coordonatele nodurilor I şi J<br />
rezultă lungimea L, iar dacă se Ńine seama şi de coordonatele nodului K se determină complet orientarea<br />
barei în spaŃiu. Din materialul atribuit elementului de grindă rezultă modulul de elasticitate longitudinal E,<br />
coeficientul lui Poisson ν şi densitatea ρ.<br />
Fig. 1.1: Elementul finit “Beam3D”.
Matricea de rigiditate a elementului în formularea Timoshenko (cu includerea efectului forŃei<br />
tăietoare în calculul deplasărilor), în sistemul de referinŃă local [28], este<br />
în care<br />
v<br />
=<br />
12EI<br />
z<br />
1 3<br />
v<br />
7<br />
=<br />
( 1+<br />
κ<br />
y )<br />
L<br />
( 2 −κ<br />
z )<br />
( 1+<br />
κ )<br />
z<br />
EI<br />
L<br />
; v<br />
y<br />
⎡ vN<br />
0 0 0 0 0 −vN<br />
0 0 0 0 0 ⎤<br />
⎢<br />
0 v1 0 0 0 v5 0 −v1 0 0 0 v<br />
⎥<br />
⎢<br />
5<br />
⎥<br />
⎢ 0 0 v2 0 −v6 0 0 0 −v2 0 −v6<br />
0 ⎥<br />
⎢<br />
⎥<br />
⎢ 0 0 0 vT<br />
0 0 0 0 0 −vT<br />
0 0 ⎥<br />
⎢ 0 0 −v6 0 v3 0 0 0 v6 0 v7<br />
0 ⎥<br />
⎢<br />
⎥<br />
0 v5 0 0 0 v4 0 −v5 0 0 0 v<br />
e<br />
8<br />
⎡k<br />
⎤<br />
B<br />
=<br />
⎢<br />
⎥<br />
⎣ ⎦ , (1.2)<br />
⎢−vN<br />
0 0 0 0 0 vN<br />
0 0 0 0 0 ⎥<br />
⎢<br />
⎥<br />
⎢ 0 −v1 0 0 0 −v5 0 v1 0 0 0 −v5<br />
⎥<br />
⎢<br />
0 0 −v2 0 v6 0 0 0 v2 0 v6<br />
0<br />
⎥<br />
⎢<br />
⎥<br />
⎢ 0 0 0 −vT<br />
0 0 0 0 0 vT<br />
0 0 ⎥<br />
⎢<br />
⎥<br />
⎢<br />
0 0 −v6 0 v7 0 0 0 v6 0 v3<br />
0<br />
⎥<br />
⎢⎣<br />
0 v5 0 0 0 v8<br />
0 −v5 0 0 0 v ⎥<br />
4 ⎦<br />
12EI<br />
y<br />
=<br />
2 ( 1+<br />
κ )<br />
3<br />
z<br />
L<br />
; v<br />
8<br />
=<br />
( 2 −κ<br />
y )<br />
( 1+<br />
κ<br />
y )<br />
; v<br />
EI<br />
L<br />
3<br />
=<br />
z<br />
; vN<br />
( 4 + κ<br />
z )<br />
( 1+<br />
κ )<br />
z<br />
EI<br />
L<br />
EA<br />
= ; v<br />
L<br />
y<br />
T<br />
; v<br />
4<br />
=<br />
GI<br />
=<br />
L<br />
t<br />
( 4 + κ<br />
y )<br />
( 1+<br />
κ<br />
y )<br />
EI<br />
L<br />
z<br />
; v<br />
=<br />
6EI<br />
z<br />
5 2<br />
( 1+<br />
κ<br />
y )<br />
L<br />
; v<br />
6EI<br />
y<br />
=<br />
6 ( 1+<br />
κ )<br />
2<br />
z<br />
L<br />
12φ<br />
y<br />
EI z<br />
12φ<br />
z<br />
EI y E<br />
κ<br />
y<br />
= ; κ<br />
2 z<br />
= şi G = .<br />
2<br />
GAL GAL 2 1+<br />
ν<br />
( )<br />
Dacă se consideră formularea Euler-Bernoulli (TipK = 1), atunci se consideră κ = κ = 0 , sau<br />
echivalent φ<br />
y<br />
= 0 şi φ<br />
z<br />
= 0.<br />
Matricea de masă prezintă două formulări care se identifică prin parametrul TipM. Pentru<br />
formularea matrice de masă diagonală (TipM = 1), în coordonate locale, se consideră<br />
ρ AL ρLI în care v1<br />
= ; v<br />
t<br />
2<br />
= ; v<br />
2 2<br />
([ 1 1 1 2 3 3 1 1 1 2 3 3]<br />
)<br />
e<br />
⎡<br />
⎣<br />
m ⎤<br />
B ⎦<br />
= diag v v v v v v v v v v v v , (1.3)<br />
3<br />
3<br />
ρ AL<br />
= .<br />
24<br />
Dacă matricea de masă este coerentă cu funcŃiile de formă statice (TipM = 2), atunci în<br />
programele de faŃă se consideră κ κ = 0 şi rezultă<br />
y<br />
= z<br />
y<br />
z<br />
;
⎡ vN<br />
0 0 0 0 0 vN<br />
2 0 0 0 0 0 ⎤<br />
⎢<br />
0 v1 0 0 0 v2 0 v3 0 0 0 v<br />
⎥<br />
⎢<br />
4 ⎥<br />
⎢ 0 0 v5 0 −v6 0 0 0 v7 0 v8<br />
0 ⎥<br />
⎢<br />
⎥<br />
⎢ 0 0 0 vT<br />
0 0 0 0 0 vT<br />
2 0 0 ⎥<br />
⎢ 0 0 −v6 0 v9 0 0 0 −v8 0 −v10<br />
0 ⎥<br />
⎢<br />
⎥<br />
0 v2 0 0 0 v11 0 −v4 0 0 0 −v<br />
e<br />
12<br />
⎡m<br />
⎤<br />
⎢<br />
⎥ , (1.4)<br />
⎣ B ⎦ =<br />
⎢vN<br />
2 0 0 0 0 0 vN<br />
0 0 0 0 0 ⎥<br />
⎢<br />
⎥<br />
⎢ 0 v3 0 0 0 −v4 0 v1 0 0 0 −v2<br />
⎥<br />
⎢<br />
0 0 v7 0 −v8 0 0 0 v5 0 v6<br />
0<br />
⎥<br />
⎢<br />
⎥<br />
⎢ 0 0 0 vT<br />
2 0 0 0 0 0 vT<br />
0 0 ⎥<br />
⎢<br />
⎥<br />
⎢<br />
0 0 v8 0 −v10 0 0 0 v6 0 v9<br />
0<br />
⎥<br />
⎢⎣<br />
0 v4<br />
0 0 0 −v12 0 −v2 0 0 0 v ⎥<br />
11 ⎦<br />
în care<br />
ρ AL ρLIt<br />
⎛ 13 6I vN<br />
= ; vT<br />
= ; z ⎞<br />
v1 = ρ AL⎜<br />
+<br />
2 ⎟<br />
3 3<br />
⎝ 35 5AL<br />
⎠ ; ⎛ 11L<br />
I z ⎞<br />
v2<br />
= ρ AL⎜<br />
+ ⎟<br />
⎝ 210 10AL<br />
⎠ ; ⎛ 9 6I z ⎞<br />
v3 = ρ AL ⎜ −<br />
2 ⎟<br />
⎝ 70 5AL<br />
⎠ ;<br />
⎛ 13L<br />
6I z ⎞<br />
v4<br />
= ρ AL⎜<br />
− + ⎟<br />
⎝ 420 10AL<br />
⎠ ; ⎛ 13 6I y ⎞ ⎛ 11L<br />
I<br />
v5 = ρ AL⎜<br />
+<br />
2 ⎟ ;<br />
y ⎞ ⎛ 9 6I v6<br />
= ρ AL ⎜ + ⎟ ;<br />
y ⎞<br />
v7 = ρ AL ⎜ −<br />
2 ⎟ ;<br />
⎝ 35 5AL<br />
⎠ ⎝ 210 10AL<br />
⎠ ⎝ 70 5AL<br />
⎠<br />
2<br />
2<br />
2<br />
⎛13L<br />
6I v<br />
y ⎞<br />
⎛ L 2I 8<br />
= ρ AL ⎜ − ⎟ ;<br />
y ⎞<br />
⎛ L I<br />
v9<br />
= ρ AL⎜<br />
+ ⎟;<br />
y ⎞<br />
⎛ L 2I v10<br />
= ρ AL ⎜ + ⎟ ;<br />
z<br />
⎞<br />
v11<br />
= ρ AL ⎜ + ⎟ ;<br />
⎝ 420 10AL<br />
⎠<br />
⎝105 15A<br />
⎠<br />
⎝140 30A<br />
⎠<br />
⎝105 15A<br />
⎠<br />
v<br />
12<br />
2<br />
⎛ L I z<br />
⎞<br />
= ρ AL ⎜ + ⎟ .<br />
⎝140 30A<br />
⎠<br />
Transformarea matricelor în sistemul de referinŃă global se face cu relaŃiile de transformare<br />
e e<br />
T<br />
e e<br />
B<br />
=<br />
B<br />
⎡<br />
⎣K ⎤<br />
⎦<br />
⎡<br />
⎣T ⎤<br />
⎦<br />
⎡<br />
⎣k ⎤<br />
⎦<br />
⎡<br />
⎣T<br />
⎤<br />
⎦ ; e e<br />
T<br />
e e<br />
⎡<br />
⎣M ⎤<br />
B ⎦ = ⎡<br />
⎣T ⎤<br />
⎦<br />
⎡<br />
⎣m ⎤ ⎡<br />
B ⎦ ⎣T<br />
⎤<br />
⎦ , (1.5)<br />
e<br />
în care matricea de transformare ⎡<br />
⎣<br />
T ⎤<br />
⎦<br />
conŃine cosinusurile directoare l , m, n ale unghiurilor formate de<br />
axele de coordonate ale celor două sisteme de referinŃă local-global (vezi Fig. 1.1), aranjate astfel:<br />
Axele X Y Z<br />
x<br />
y<br />
z<br />
l<br />
1 m<br />
1<br />
n<br />
1<br />
l<br />
2 m<br />
2<br />
n<br />
2<br />
l<br />
3<br />
m<br />
3<br />
n<br />
3<br />
Dacă matricea cosinusurilor directoare, numită şi matricea de rotaŃie, se notează<br />
atunci matricea de transformare devine<br />
[ λ]<br />
⎡l<br />
⎢<br />
l<br />
m<br />
1 1 1<br />
m<br />
= ⎢<br />
2 2 2 ⎥<br />
⎢⎣<br />
l<br />
m<br />
3 3 3<br />
n ⎤<br />
n<br />
⎥<br />
, (1.6)<br />
n<br />
⎥⎦<br />
diag( [ ] [ ] [ ] [ ] )<br />
e<br />
⎡<br />
⎣T ⎤<br />
⎦ = ⎡⎣ λ λ λ λ ⎤⎦<br />
. (1.7)