
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
6.5. Tratarea evenimentelor 151<br />
0.3<br />
0.2<br />
0.1<br />
0<br />
−0.1<br />
−0.2<br />
−0.3<br />
0 0.2 0.4 0.6 0.8 1<br />
(a) 2e-3<br />
0.3<br />
0.2<br />
0.1<br />
0<br />
−0.1<br />
−0.2<br />
−0.3<br />
0 0.2 0.4 0.6 0.8 1<br />
(b) 1e-6<br />
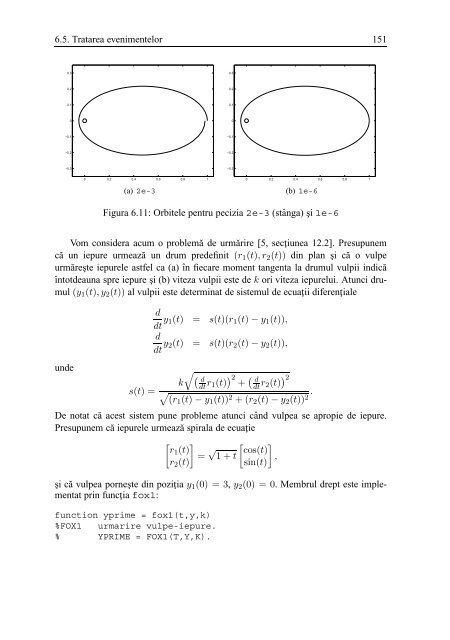
Figura 6.11: Orbitele pentru pecizia 2e-3 (stânga) s¸i 1e-6<br />
Vom considera acum o problemă de urmărire [5, sect¸iunea 12.2]. Presupunem<br />
că un iepure urmează un drum predefinit (r1(t),r2(t)) din plan s¸i că o vulpe<br />
urmăres¸te iepurele astfel ca (a) în fiecare moment tangenta la drumul vulpii indică<br />
întotdeauna spre iepure s¸i (b) viteza vulpii este de k ori viteza iepurelui. Atunci drumul<br />
(y1(t),y2(t)) al vulpii este determinat de sistemul de ecuat¸ii diferent¸iale<br />
unde<br />
d<br />
dt y1(t) = s(t)(r1(t)−y1(t)),<br />
d<br />
dt y2(t) = s(t)(r2(t)−y2(t)),<br />
<br />
<br />
d k dt<br />
s(t) =<br />
r1(t) 2 <br />
d + dtr2(t) 2 <br />
(r1(t)−y1(t)) 2 +(r2(t)−y2(t)) 2.<br />
De notat că acest sistem pune probleme atunci când vulpea se apropie de iepure.<br />
Presupunem că iepurele urmează spirala de ecuat¸ie<br />
<br />
r1(t)<br />
=<br />
r2(t)<br />
√ <br />
cos(t)<br />
1+t ,<br />
sin(t)<br />
s¸i că vulpea pornes¸te din pozit¸ia y1(0) = 3, y2(0) = 0. Membrul drept este implementat<br />
prin funct¸ia fox1:<br />
function yprime = fox1(t,y,k)<br />
%FOX1 urmarire vulpe-iepure.<br />
% YPRIME = FOX1(T,Y,K).