
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
5.3. Ecuat¸ii neliniare s¸i minimizare 125<br />
10<br />
8<br />
6<br />
4<br />
2<br />
0<br />
−2<br />
−4<br />
−6<br />
−8<br />
−10<br />
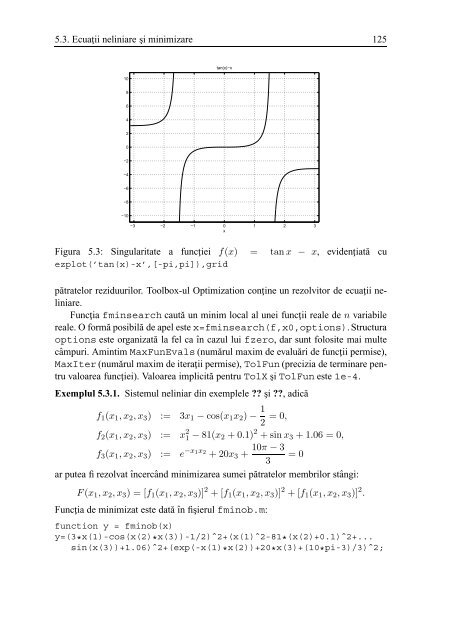
tan(x)−x<br />
−3 −2 −1 0<br />
x<br />
1 2 3<br />
Figura 5.3: Singularitate a funct¸iei f(x) = tanx − x, evident¸iată cu<br />
ezplot(’tan(x)-x’,[-pi,pi]),grid<br />
pătratelor reziduurilor. Toolbox-ul Optimization cont¸ine un rezolvitor de ecuat¸ii neliniare.<br />
Funct¸ia fminsearch caută un minim local al unei funct¸ii reale de n variabile<br />
reale. O formă posibilă de apel este x=fminsearch(f,x0,options). Structura<br />
options este organizată la fel ca în cazul lui fzero, dar sunt folosite mai multe<br />
câmpuri. Amintim MaxFunEvals (numărul maxim de evaluări de funct¸ii permise),<br />
MaxIter (numărul maxim de iterat¸ii permise), TolFun (precizia de terminare pentru<br />
valoarea funct¸iei). Valoarea implicită pentru TolX s¸i TolFun este 1e-4.<br />
Exemplul 5.3.1. Sistemul neliniar din exemplele ?? s¸i ??, adică<br />
f1(x1,x2,x3) := 3x1 −cos(x1x2)− 1<br />
= 0,<br />
2<br />
f2(x1,x2,x3) := x 2 1 −81(x2 +0.1) 2 +sinx3 +1.06 = 0,<br />
f3(x1,x2,x3) := e −x1x2 10π −3<br />
+20x3 + = 0<br />
3<br />
ar putea fi rezolvat încercând minimizarea sumei pătratelor membrilor stângi:<br />
F(x1,x2,x3) = [f1(x1,x2,x3)] 2 +[f1(x1,x2,x3)] 2 +[f1(x1,x2,x3)] 2 .<br />
Funct¸ia de minimizat este dată în fis¸ierul fminob.m:<br />
function y = fminob(x)<br />
y=(3*x(1)-cos(x(2)*x(3))-1/2)ˆ2+(x(1)ˆ2-81*(x(2)+0.1)ˆ2+...<br />
sin(x(3))+1.06)ˆ2+(exp(-x(1)*x(2))+20*x(3)+(10*pi-3)/3)ˆ2;