

Capitolul II. SISTEME DE REGLARE AUTOMATĂ
Capitolul II. SISTEME DE REGLARE AUTOMATĂ
Capitolul II. SISTEME DE REGLARE AUTOMATĂ

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
TEORIA <strong>SISTEME</strong>LOR ŞI AUTOMATIZĂRI Cap. 2. Sisteme de reglare automată<br />
<strong>Capitolul</strong> <strong>II</strong>. <strong>SISTEME</strong> <strong>DE</strong> <strong>REGLARE</strong> <strong>AUTOMATĂ</strong><br />
2.1 Generalităţi despre sistemele de reglare automată<br />
2.1.1 Structura sistemelor de reglare automată – rolul reacţiei negative<br />
Primele şi cele mai importante aplicaţii ale toriei sistemelor se regăsesc în domeniul<br />
automatizărilor. Noţiunile din capitolul anterior au avut rolul de a uşura studiul sistemelor de<br />
reglare automată SRA, care constituie obiectul studiului şi ingineriei reglării.<br />
Sistemele de reglare automată SRA sunt sisteme fizice artificiale, construite<br />
pentru a impune legi de variaţie controlate unor mărimi fizice, care sunt<br />
parametri ai unor procese tehnice.<br />
Unui SRA i se impun obiective ale reglării, materializate prin valori impuse aplicate<br />
la intrare şi un set de parametri de apreciere a calităţii reglării (din punctul de vedere al<br />
precizie, şi vitezei de răspuns, dar şi al energiei consumate, al numărului de acţiuni de reglare,<br />
etc.).<br />
Procedeul care stă la baza acţiunii de reglare automată este reacţia negativă (“feedback”<br />
lb. engl.). Pentru ilustrarea modului de funcţionare al SRA şi al reacţiei negative să<br />
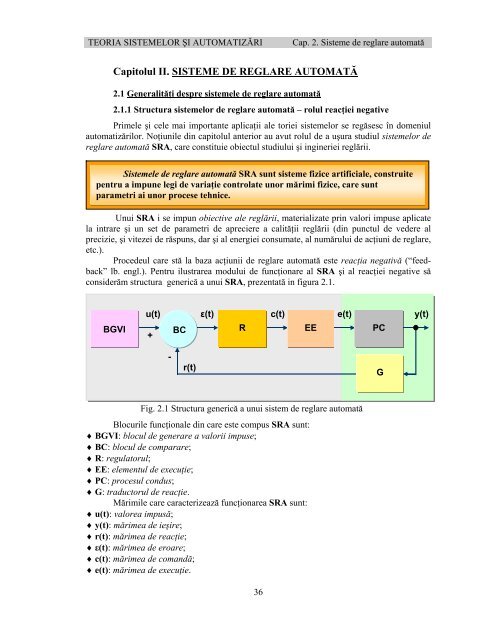
considerăm structura generică a unui SRA, prezentată in figura 2.1.<br />
u(t) ε(t) c(t) e(t) y(t)<br />
BGVI<br />
+<br />
BC<br />
R<br />
EE<br />
PC<br />
-<br />
r(t)<br />
Fig. 2.1 Structura generică a unui sistem de reglare automată<br />
Blocurile funcţionale din care este compus SRA sunt:<br />
♦ BGVI: blocul de generare a valorii impuse;<br />
♦ BC: blocul de comparare;<br />
♦ R: regulatorul;<br />
♦ EE: elementul de execuţie;<br />
♦ PC: procesul condus;<br />
♦ G: traductorul de reacţie.<br />
Mărimile care caracterizează funcţionarea SRA sunt:<br />
♦ u(t): valorea impusă;<br />
♦ y(t): mărimea de ieşire;<br />
♦ r(t): mărimea de reacţie;<br />
♦ ε(t): mărimea de eroare;<br />
♦ c(t): mărimea de comandă;<br />
♦ e(t): mărimea de execuţie.<br />
36<br />
G
TEORIA <strong>SISTEME</strong>LOR ŞI AUTOMATIZĂRI Cap. 2. Sisteme de reglare automată<br />
BGVI generează i(t), o mărime a cărei natură şi valoare sunt compatibile cu SRA,<br />
reprezentând o măsură a obiectivului reglării. Natura fizică a i(t) (electrică, pneumatică,<br />
hidraulică, etc.) depinde de natura fizică a regulatorului. Având în vedere dezvoltarea<br />
extraordinară a sistemelor electronice, marea majoritate a SRA sunt actualmente de natură<br />
electrică.<br />
De regulă, valorile impuse respectă o<br />
standardizare internaţională. De exemplu, în<br />
cazul regulatoarelor electronice de turaţie pentru<br />
motoarele electrice, se utilizează valori cuprinse<br />
în plaja –10VCC ÷ +10VCC.<br />
Pentru telecomenzi se utilizează semnale<br />
de curent, care au avantajul că nu sunt atenuate<br />
de trecerea prin cablaje de mare lungime, cel mai<br />
utilizat sistem fiind: 4ACC ÷ 20 ACC.<br />
lim ε(t) = 0<br />
t→∞<br />
(2.1)<br />
37<br />
+10V<br />
Turaţie maximă – sens pozitiv<br />
OV<br />
Turaţie nulă<br />
-10V<br />
Turaţie maximă – sens negativ<br />
Fig. 2.2 Valori impuse<br />
Metodele de generare a valorii impuse sunt cuprinse ca grad de complexitate între<br />
metoda potenţiometrului acţionat manual şi generarea pe cale numerică.<br />
i(t) este în continuare comparată cu r(t), mărimea de reacţie. r(t) este o măsură<br />
mărimii de ieşire y(t) ale cărei valori dorim să le comandăm. Traductorul G care furnizează<br />
r(t) adaptează natura fizică şi nivelul ieşirii y(t) astfel încât aceasta să poată fi comparată cu<br />
i(t).<br />
Compararea din BC se face prin scădere, rezultând eroarea de reglare ε(t)=i(t)-r(t).<br />
Reacţia introdusă prin G este deci negativă.<br />
Eroarea de reglare este mărimea esenţială prin care se poate formula atingerea obiectivului<br />
reglării:<br />
SRA trebuie să acţioneze astfel încât în timpul regimurilor staţionare, în care i(t) este<br />
constant, eroarea ε(t) să se anuleze. În urma variaţiilor i(t) se produc regimuri tranzitorii, în<br />
timpul cărora ε(t) trebuie să fie minimă.<br />
Pentru a funcţiona în modul de mai sus SRA trebuie să modifice parametrii PC în mod<br />
adecvat, prin mărimea de execuţie e(t). e(t) este produsă de către EE, bloc al SRA care<br />
adaptează sistemul la natura fizică şi nivelele energetice impuse de proces şi care este condus<br />
la rândul său prin mărimea de comandă c(t).<br />
În mod evident, blocul esenţial al SRA este R, care are rolul ca pe baza analizării<br />
erorii ε(t) să elaboreze mărimea de comandă c(t), conform unei legi de reglare.<br />
Reacţia negativă 1 care face posibilă funcţionarea SRA este în esenţă o metodă de<br />
urmărire a efectelor comenzilor date sistemului. Desigur, nu se poate conduce corect nici un<br />
proces, indiferent de natura sa, fără a avea informaţii despre evoluţia sa reală.<br />
1 Reacţia negativă (feed-back-ul) este o “descoperire” a naturii. Ea este un atribut specific vieţii şi este<br />
prezentă în natură începând chiar de la nivelul celulelor. Sistemele de reglare vii sunt de natură<br />
biochimică. Exemple de astfel de reglări pot fi date chiar pentru organismul uman: stabilizarea<br />
temperaturii corpului în jur de 37 0 C, reglarea ritmului respiraţiei şi inimii în funcţie de efortul depus,<br />
reglarea deschiderii pupilei în funcţie de nivelul iluminării. Reacţia negativă caracterizează chiar şi<br />
sistemele sociale sau economice prin fenomene ca: greve, fluctuaţii de preţuri, etc.
TEORIA <strong>SISTEME</strong>LOR ŞI AUTOMATIZĂRI Cap. 2. Sisteme de reglare automată<br />
2.1.2 Exemple de sisteme de reglare automată<br />
Exemplul 2.1: funcţionarea unui stabilizator de tensiune cu un tranzistor. Cel mai<br />
simplu stabilizator de tensiune, cu un tranzistor bipolar ca element de reglare serie, conţine<br />
toate elementele generice ale SRA, deşi unele blocuri au o formă mai puţin evidentă.<br />
T<br />
UBE<br />
R i<br />
RS<br />
uI DZ VZ UO<br />
Fig. 2.3 Stabilizator de tensiune<br />
Unei tendinţe de variaţie a UO, de exemplu de creştere, îi urmează o tendinţă de<br />
scădere a UBE, provoacând o tendinţă de scădere a i, care la rândul său provoacă o tendinţă de<br />
scădere a tensiunii de ieşire. Tendinţei iniţiale de variaţie a mărimii de ieşire, SRA i se opune<br />
printr-o tendinţă în sens opus, ceea ce are ca efect stabilizarea mărimii de ieşire. În acest<br />
exemplu componentele stabilizatorului îndeplinesc următoarele roluri:<br />
♦ DZ - valoare impusă;<br />
♦ joncţiunea EB a tranzistorului bipolar – bloc de comparaţie şi regulator, prin caracteristica<br />
sa tensiune-curent;<br />
♦ T - element de execuţie;<br />
♦ R – proces condus şi traductor de reacţie.<br />
Exemplul 2.2 Sincronizarea turaţiei motoarelor electrice dintr-o linie continuă de<br />
perlucrare a materialelor textile.Materialele textile se prelucrează sub formă de cupoane de<br />
lungime foarte mare, în linii continue, alcătuite din mai multe maşini care execută operaţii<br />
succesive. Fiecare maşină impune o viteză de avans, care variază în anumite limite în funcţie<br />
de factorii tehnologici. Pentru ca linia să funcţioneze continuu este necesară sincronizarea<br />
avansurilor fiecărei maşini. Una dintre maşini are rol conducător, celelalte trebuind să se<br />
sincronizeze după ea. Un sisteme care realizează această operaţie este prezentat în figura<br />
următoare.<br />
v1 v2<br />
M1 B M2<br />
ε(t)<br />
ME1<br />
VT<br />
ME1<br />
Componentele stabilizatorului sunt: tranzistorul<br />
bipolar T, dioda Zener DZ şi rezistorul R.<br />
Tensiunea de ieşire UO de pe rezistenţa de<br />
sarcină RS are valoarea VZ-UBE. Ea este stabilizată<br />
împotriva variaţiilor tensiunii de intrare uI, ale<br />
curentului i sau ale RS prin următoarea reacţie<br />
negativă:<br />
↑UO → ↓UBE → ↓i → ↓UO<br />
TP<br />
Fig. 2.4 Sistem de sincronizare a turaţiilor motoarelor electrice<br />
38
TEORIA <strong>SISTEME</strong>LOR ŞI AUTOMATIZĂRI Cap. 2. Sisteme de reglare automată<br />
Elementele sistemului sunt:<br />
♦ cele două maşini de prelucrare a ţesăturii M1 (antrenată de motorul electric ME1) şi M2;<br />
♦ balerinul B, o roată a cărei ax este mobil pe direcţia verticală;<br />
♦ traductorul de poziţie TP, care transformă poziţia balerinului de-a lungul axei verticale<br />
într-un semnal electric;<br />
♦ variatorul de turaţie VT pentru motorul electric.<br />
M2 are rolul conducător imprimând ţesăturii o anumită viteză v2. Se consideră poziţia<br />
centrală a balerinului ca ideală. Dacă viteza v1 imprimată ţesăturii de M1 este egală cu v2<br />
poziţia balerinului va rămâne constantă. Când v1< v2 cantitatea de material dintre cele două<br />
maşini începe să scadă, ceea ce va antrena ridicarea balerinului şi apariţia unei erori de poziţie<br />
ε. Dacă v1>v2 eroarea de poziţie va apărea în sens opus, prin coborârea balerinului. Semnalul<br />
ε constituie informaţia primară din care regulatorul din componenţa variatorului de turaţie va<br />
elabora comenzile necesare ca turaţia ME1 să se modifice, până la anularea erorii ε.<br />
În acest ansablu regulatorul este înglobat în VT iar traductorul de reacţie conţine ca<br />
element senzitiv balerinul, la care se adaugă un sistem traductor de poziţie. Elementul de<br />
execuţie al sistemului poate fi considerat ME1, dar nu trebuie pierdut din vedere faptul că<br />
reglarea turaţiei motoarelor electrice necesită la rândul său un SRA complex, inclus în VT,<br />
care va fi tratat în capitolele următoare.<br />
Exemplul 2.3 Reglarea mecanică a nivelului de carburant într-o cameră de nivel constant<br />
dintr-un carburator clasic. Camera de nivel constant este cilindrică. Admisia carburantului se<br />
face printr-un orificiu din partea superioară, pl sat în vârful unei degajări de formă conică.<br />
Evacuarea combustibilului se face printr-un orificiu din partea inferioară a camerei. Debitul<br />
de ieşire QE are valori foarte diverse şi variaţii bruşte, în funcţie de acţionarea pedalei de<br />
acceleraţie a automobilului. Pentru stabilizarea nivelului din cameră se utilizează un flotor<br />
prevăzut în parte superioară cu un cui poantou, de formă conică, autoghidat în degajarea conică<br />
a orificiului de admisie. Cu cât nivelul lichidului din cameră este mai mare, flotorul se<br />
ridică iar secţiunea prin care lichidul intră în cameră se micşorează. În acest fel debitul de<br />
intrare QI scade, ceea ce are ca efect scăderea nivelului. Când nivelul lichidului din cameră<br />
scade, secţiunea de admisie creşte, ceea ce provoacă creşterea QI şi a nivelului.<br />
QI<br />
F<br />
39<br />
QE<br />
Fig. 2.5 Reglarea nivelului de lichid cu ajutorul unui flotor<br />
Flotorul F îndeplineşte rolul de traductor de reacţie iar cuiul poantou CP pe cel de<br />
regulator şi de element de execuţie în acelaşi timp.<br />
CP
TEORIA <strong>SISTEME</strong>LOR ŞI AUTOMATIZĂRI Cap. 2. Sisteme de reglare automată<br />
2.1.3 Clasificarea sistemelor de reglare automată<br />
Înainte de a începe studierea SRA, pentru precizarea unei terminologii şi pentru a avea<br />
o vedere de ansamblu este utilă introducerea unor clasificări, după diferite criterii.<br />
a) După natura fizică. Natura fizică a SRA este extrem de diversă, în acelaşi sistem putând<br />
coexista subansamble electronice, electrice, hidraulice, pneumatice, mecanice, etc. Vom<br />
considera în continuare că natura unui SRA este dată de natura regulatorului.<br />
♦ SRA electronice acoperă marea majoritate a aplicaţiilor actuale.<br />
♦ SRA electromecanice reprezintă tehnologia primei jumătăţi a secolului, fiind utilizate încă<br />
în unele aplicaţii de mică anvergură: relee de temporizare, aparatură casnică, etc.<br />
♦ SRA pneumatice utilizează aerul comprimat. Ele se întâlnesc în procesele industriale în<br />
care există deja reţea de aer comprimat (industria textilă, vagoane de cale ferată, etc.) sau în<br />
instalaţiile cu pericol de explozie, în care echipamentele electrice sunt nerecomandabile.<br />
♦ SRA hidraulice utilizează uleiul sub presiune. Ele se întâlnesc în legătură cu acţionările<br />
hidraulice, care au cel bai bun raport forţă/volum dintre acţionările industriale.<br />
Cazul tipic de SRA al anilor actuali este cel al unui echipament electronic care<br />
conduce procesul industrial prin mai multe elemente de execuţie de naturi fizice diverse. SRA<br />
de altă natură decât electronică sunt legate de fiecare acţionare în parte, operând la nivel local<br />
(de exemplu regulatoare de presiune, de debit, relee de protecţie, etc.), fiind supervizate de<br />
echipamentul central.<br />
b) După natura semnalelor prelucrate.<br />
♦ SRA cu acţiune continuă, care prelucrează semnale continue în timp, reprezentate prin sistemele<br />
de altă natură decât electronică şi cele electronice analogice;<br />
♦ SRA cu acţiune discontinuă în timp se împart la rândul lor în sisteme cu impulsuri<br />
modulate şi sisteme numerice (digitale).<br />
Dacă până în anii ’70 regulatoarele electronice analogice îşi împărţeau piaţa şi cu produse<br />
de altă natură, odată cu introducerea tehnicilor numerice (prin microprocesoare şi controlere)<br />
echilibrul a fost rupt, se pare pentru multă vreme, în favoarea SRA numerice. Deşi la<br />
început se părea că preţul acestor SRA va fi un factor limitativ, datorită investiţiilor majore sa<br />
produs o creştere continuă a raportului calitate/preţ, astfel că astăzi “cip-urile” au ajuns să<br />
doteze chiar produse de larg consum (telefoane, televizoare, cuptoare cu microunde, etc.).<br />
c) După relaţia funcţională dintre mărimile de intrare şi ieşire.<br />
♦ SRA liniare, cu un model matematic liniar;<br />
♦ SRA neliniare. Aceste sisteme vor fi prezentate pe scurt în ultimul capitol.<br />
d) După numărul variabilelor de intrare şi de ieşire.<br />
♦ SRA monovariabile, cu o singură variabilă de intrare şi una de ieşire;<br />
♦ SRA multivariabile.<br />
e) După natura concentrată sau distribuită a parametrilor.<br />
♦ SRA cu parametri concentraţi, care pot fi descrise prin ecuaţii diferenţiale ordinare;<br />
♦ SRA cu parametri distribuiţi, necesitând ecuaţii cu derivate parţiale. Astfel de parametri<br />
apar în cazul liniilor electrice lungi, al proceselor termice şi hidraulice, etc.<br />
40
TEORIA <strong>SISTEME</strong>LOR ŞI AUTOMATIZĂRI Cap. 2. Sisteme de reglare automată<br />
f) După natura invariantă sau variabilă cu timpul a parametrilor.<br />
♦ SRA cu parametri invarianţi cu timpul;<br />
♦ SRA cu parametri variabili în timp.<br />
g) După natura deterministă sau stohastică a semnalelor.<br />
♦ SRA deterministe, în care semnalele sunt reprezentabile prin funcţii de timp;<br />
♦ SRA stohastice, cu semnale care pot fi descrise probabilistic.<br />
h) După capacitatea sistemului de a se adapta automat la procesul condus<br />
♦ SRA neadaptive;<br />
♦ SRA adaptive. Aceste sisteme vor fi prezentate pe scurt în ultimul capitol.<br />
i) După capacitatea de înglobare a inteligenţei artificiale.<br />
♦ SRA fără inteligenţă artificială;<br />
♦ SRA cu inteligenţă artificială. Aceste sisteme pot fi la rândul lor sisteme expert, fuzzy, cu<br />
reţele neuronale, etc. Aceste sisteme vor fi prezentate pe scurt în ultimul capitol.<br />
În figura următoare sunt prezentate schematic principalele clase de sisteme de reglare.<br />
Linia întreruptă indică existenţa unor subclase asemănătoare la fiecare nivel.<br />
S R A<br />
Cu parametri distribuiţi Cu parametri concentraţi<br />
Deterministic Stohastic<br />
Continuu Discret<br />
Liniar Neliniar<br />
Invariant în timp Variabil în timp<br />
Fig. 2.6 Schemă pentru clasificarea sistemelor<br />
41
TEORIA <strong>SISTEME</strong>LOR ŞI AUTOMATIZĂRI Cap. 2. Sisteme de reglare automată<br />
2.1.4 Funcţiile de transfer ale sistemelor de reglare automată<br />
Considerând SRA din figura 2.1, fiecărui bloc i se poate atribui o FT: R(s) pentru<br />
regulator, EE(s) pentru elementul de execuţie, PC(s) pentru procesul condus şi G(s) pentru<br />
traductorul de reacţie. R, EE şi PC alcătuiesc calea directă iar G, aşa cum s-a văzut, bucla de<br />
reacţie. Pentru calea directă se consideră de obicei funcţia de transfer echivalentă:<br />
Hd(s) = R(s)⋅EE(s)⋅PC(s) (2.2)<br />
H(<br />
s)<br />
Cu bucla de reacţie închisă, FT a SRA va deveni:<br />
H d ( s)<br />
= (2.3)<br />
1 + G(<br />
s)<br />
⋅ H ( s)<br />
d<br />
Produsul G(s)⋅Hd(s) se numeşte funcţie de transfer în buclă deschisă a sistemului.<br />
Foarte des se apelează la SRA cu reacţie unitară, la care se ajunge uşor dacă vom considera<br />
traductorul de reacţie ca făcând parte din procesul condus iar mărimea de ieşire a sistemului<br />
ieşirea traductorului de reacţie:<br />
H(<br />
s)<br />
H<br />
H d ( s)<br />
= (2.4)<br />
1 + H ( s)<br />
d<br />
+ +<br />
Hd(s)<br />
U(s) - Y(s) U(s) - Y(s)<br />
SRA în buclă închisă (2.3) SRA cu reacţie unitară (2.4)<br />
Fig. 2.7 Funcţii de transfer ale sistemelor de reglare automată în buclă închisă<br />
Exemplul 2.4: Funcţia de transfer a unui SRA în buclă închisă.<br />
10(1+1/s) 5/(s<br />
U(s) + - Y(s)<br />
2 +4s+3)<br />
d<br />
H(<br />
s)<br />
( s)<br />
G(s)<br />
2/(s+0,1)<br />
Fig. 2.8 Exemplu de SRA în buclă închisă<br />
50 ⋅ ( s + 1)<br />
50 ⋅ ( s + 1)<br />
50<br />
= =<br />
=<br />
(2.5)<br />
2<br />
s ⋅ ( s + 4s<br />
+ 3)<br />
s ⋅ ( s + 1)(<br />
s + 3)<br />
s ⋅ ( s + 3)<br />
50<br />
1<br />
50 ⋅ ( s + 0,<br />
1)<br />
= ⋅<br />
=<br />
(2.6)<br />
2 50<br />
2<br />
s ⋅ ( s + 3)<br />
1 + ⋅<br />
s ⋅ ( s + 3,<br />
1s<br />
+ 50,<br />
3)<br />
( s + 0,<br />
1)<br />
s ⋅ ( s + 3)<br />
42<br />
Hd(s)
TEORIA <strong>SISTEME</strong>LOR ŞI AUTOMATIZĂRI Cap. 2. Sisteme de reglare automată<br />
2.2 Calculul performanţelor SRA cu ajutorul funcţiei de transfer<br />
2.2.1 Indici de performanţă în regim dinamic<br />
Pentru introducerea unor indici de performanţă a răspunsurilor SRA, cea mai simplă şi<br />
uzitată metodă face apel la răspunsul indicial, care este utilizabil atât în regim dinamic, prin<br />
regimul său tranzitoriu, cât şi în regim static, spre deosebire de funcţia pondere care poate fi<br />
utilizată numai pentru aprecierea regimurilor dinamice.<br />
a) Pentru sistemele de ordin I care au răspuns indicial (1.50) de forma i(<br />
t)<br />
= k ( 1 e T<br />
0 − ) se<br />
pot defini următorii parametri:<br />
♦ T: constanta de timp, caracterizând viteza de răspuns;<br />
♦ tt: durata procesului tranzitoriu;<br />
♦ εst: eroarea staţionară, caracterizând precizia de reglare.<br />
k0<br />
1<br />
i(t)<br />
0,95k0<br />
Fig. 2.9 Parametri ai i(t) pentru<br />
sisteme de ordin I<br />
εst<br />
t<br />
b) Sistemele de ordin <strong>II</strong> cu ξ>1 au un răspuns indicial supraamortizat asemănător cu cele de<br />
ordin I. Constanta de timp poate stabili grafic, în punctul în care tangenta la i(t) intersectează<br />
dreapta yst. Pentru cazul 0
TEORIA <strong>SISTEME</strong>LOR ŞI AUTOMATIZĂRI Cap. 2. Sisteme de reglare automată<br />
Principalii parametri legaţi de desfăşurarea în timp a răspunsului sunt:<br />
♦ timpul de întârziere: ti necesar ca răspunsul să crească de la 0 la 0,5yst;<br />
♦ timpul de creştere: tc necesar ca răspunsul să crească de la 0,05yst la 0,95yst;<br />
♦ durata procesului tranzitoriu: tt necesar ca răspunsul să intre în banda 0,95yst ÷1,05yst definitiv.<br />
Din răspuns se mai pot extrage şi timpul mort τ, necesar că răspunsul să depăşască<br />
0,05yst şi pulsaţia naturală ωn = 2π/TP obţinută cu ajutorul TP, perioada oscilaţiilor<br />
amortizate.<br />
Principalii parametri legaţi de amplitudine răspunsului sunt:<br />
y max − y st<br />
♦ suprareglajul: σ =<br />
y<br />
⋅ 100 [%] (2.9)<br />
st<br />
♦ eroarea staţionară: εst = k0 - yst (2.10)<br />
În sens larg, eroarea staţionară trebuie interpretată ca diferenţa dintre valoarea impusă<br />
care se doreşte la ieşire şi valoarea efectiv stabilită, în regim staţionar. Ea se asociază cu<br />
precizia de reglare, care este cu atât mai bună cu cât eroarea este mai mică.<br />
2.2.2 Indici de performanţă în regim staţionar<br />
Pentru calculul preciziei, principalul parametru care caracterizează regimurile statice,<br />
FT poate fi aplicată deosebit de avantajos datorită teoremei valorii finale. Aplicată asupra<br />
imaginii Laplace, teorema permite calculul valorii spre care tinde originalul (vezi Anexa 1):<br />
lim f(t) = f(∞) = lim [s⋅F(s)] (2.11)<br />
t→∞ s→0<br />
Vom considera cazul unui SRA cu reacţie unitară (2.4), având FT a căii directe sub o<br />
formă care să evidenţieze amplificarea în regim staţionar k0 şi numărul α de poli din origine:<br />
k o P(<br />
s)<br />
H d ( s)<br />
= ⋅<br />
(2.12)<br />
α<br />
s Q(<br />
s)<br />
unde polinoamele P(s) şi Q(s) au ultimii termeni egali cu unitatea (k0 = b0/a0 vezi definiţia<br />
FT).<br />
U(s)<br />
+<br />
_<br />
ε(s)<br />
k o P(<br />
s)<br />
H d ( s)<br />
= ⋅<br />
α<br />
s Q(<br />
s)<br />
Y(s<br />
Fig. 2.11 Sistem de reglare automată de tip α cu reacţie unitară<br />
a) Pentru cazul răspunsului indicial se defineşte coeficientul de eroare de poziţie KP:<br />
K P = s→0<br />
lim H d ( s)<br />
(2.13)<br />
P(<br />
0)<br />
k 0 = K pentru α=0<br />
Q(<br />
0)<br />
44
TEORIA <strong>SISTEME</strong>LOR ŞI AUTOMATIZĂRI Cap. 2. Sisteme de reglare automată<br />
KP = (2.14)<br />
∞ pentru α>0<br />
45
TEORIA <strong>SISTEME</strong>LOR ŞI AUTOMATIZĂRI Cap. 2. Sisteme de reglare automată<br />
Vom calcula transformata Laplace a erorii de reglare:<br />
⎡ H d ( s)<br />
⎤<br />
1<br />
ε ( s)<br />
= U(<br />
s)<br />
− Y(<br />
s)<br />
= U(<br />
s)<br />
− U(<br />
s)<br />
⋅ H(<br />
s)<br />
= U(<br />
s)<br />
⋅ ⎢1<br />
− ⎥ = U(<br />
s)<br />
⋅<br />
(2.15)<br />
⎣ 1 + H d ( s)<br />
⎦ 1 + H d ( s)<br />
Acum putem calcula eroarea staţionară a răspunsului indicial (U(s)=1/s):<br />
⎛ 1 1 ⎞ 1<br />
ε st = s→<br />
0 lim<br />
⎜<br />
⎜s<br />
⋅ ⋅<br />
=<br />
s 1 H d ( s)<br />
⎟<br />
(2.16)<br />
⎝ + ⎠ 1 + K P<br />
Eroarea va depinde de tipul sistemului.<br />
♦ Pentru sisteme de tip 0 coeficientul K este finit, eroarea fiind diferită de zero:<br />
1<br />
ε st =<br />
(2.17)<br />
1 + K<br />
Pentru scăderea εst se poate creşte k0, dar numai până la o anumită limită, la depăşirea<br />
căreia funcţionarea SRA în regim dinamic şi toleranţa la perturbaţii vor fi compromise.<br />
Pentru anularea εst se pot însă utiliza sistemele de tip superior.<br />
♦ Pentru sisteme de tip mai mare sau egal cu 1, KP = ∞, ceea ce produce anularea εst:<br />
εst = 1/∞ = 0 (2.18)<br />
b) Pentru semnalul de intrare de tip rampă se defineşte coeficientul de eroare de viteză KV:<br />
K<br />
V<br />
⎡ k<br />
= s→0<br />
lim s ⋅ H d ( s)<br />
= s→0<br />
lim⎢<br />
α<br />
⎣s<br />
0 pentru α=0<br />
0<br />
−1<br />
⋅<br />
P(<br />
s)<br />
⎤<br />
⎥ =<br />
Q(<br />
s)<br />
⎦<br />
k 0P(<br />
0)<br />
= = K<br />
Q(<br />
0)<br />
pentru α=1 (2.19)<br />
∞ pentru α>1<br />
Eroarea staţionară pentru un sistem de ordin 1 este:<br />
1 1 1<br />
ε st = s→<br />
0 lim ⋅ s ⋅<br />
=<br />
(2.20)<br />
2<br />
s k 0P(<br />
s)<br />
K V<br />
1 +<br />
sQ(<br />
s)<br />
Pentru sisteme de tip 0 eroarea staţionară este infinită, în timp ce pentru sistemele de<br />
tip mai mare ca 1 eroarea se anulează<br />
Terminologia acestor coeficienţi provine din domeniul sistemelor de poziţionare a<br />
maşinilor unelte. Precizia de poziţionare poate fi testată prin răspunsul indicial ca în cazul<br />
anterior a), dar dacă se impune şi reglarea precisă a vitezei de poziţionare, este recomandabilă<br />
testarea la semnal rampă. Pe aceeaşi linie, se poate introduce şi testarea acceleraţiei mişcării,<br />
printr-un semnal parabolă unitară p(t)=t 2 /2 având transformata Laplace P(s)=1/s 2 .<br />
c) Pentru intrare de tip parabolic se defineşte coeficientul de eroare de acceleraţie KA:<br />
K<br />
A<br />
=<br />
s→0<br />
lim s<br />
2<br />
⋅ H<br />
d<br />
( s)<br />
=<br />
s→0<br />
⎡ k<br />
lim⎢<br />
α<br />
⎣s<br />
0<br />
−2<br />
⋅<br />
P(<br />
s)<br />
⎤<br />
⎥ =<br />
Q(<br />
s)<br />
⎦<br />
46
TEORIA <strong>SISTEME</strong>LOR ŞI AUTOMATIZĂRI Cap. 2. Sisteme de reglare automată<br />
0 pentru α=0 sau α=1<br />
k 0P(<br />
0)<br />
= = K<br />
Q(<br />
0)<br />
pentru α=2 (2.21)<br />
∞ pentru α>2<br />
Eroarea staţionară pentru un sistem de ordin 2 este:<br />
1 1 1<br />
ε st = s→<br />
0 lim ⋅ s ⋅ =<br />
(2.22)<br />
3<br />
s k 0P(<br />
s)<br />
K A<br />
1 +<br />
2<br />
s Q(<br />
s)<br />
Pentru sisteme de tip 0 şi 1 eroarea staţionară este infinită, în timp ce pentru sistemele<br />
de tip mai mare ca 2 eroarea se anulează<br />
În tabelul următor se sintetizează concluziile analizei erorilor staţionare.<br />
εst pentru: treaptă unitară rampă unitară parabolă unitară<br />
tip 0 (α=0) 1/(1+Kp) ∞ ∞<br />
tip 1 (α=1) 0 1/KV ∞<br />
tip 2 (α=2) 0 0 1/KA<br />
Cunoaşterea coeficienţilor de eroare, uşor calculabili din FT permite alegerea celor<br />
mai bune configuraţii de SRA conform scopului propus.<br />
De exemplu, pentru cazul în care este necesară reglarea poziţiei şi vitezei unei<br />
acţionări electrice, regulatorul va trebui astfel ales încât calea directă a sistemului să aibă tipul<br />
1 sau 2, după cum eroarea admisibilă pentru viteză este mai mare sau mai mică. Cele mai<br />
multe aplicaţii necesită însă numai anularea erorii de poziţie, care se obţine prin introducerea<br />
unui pol în origine (un element integrativ de ordin I).<br />
În cazul sistemelor cu reacţie neunitară rezultatele sunt asemănătoare.<br />
2.2.3 Performanţe în domeniul frecvenţelor<br />
Cu ajutorul caracteristicilor de frecvenţă pot fi definiti mai mulţi indici de performanţă<br />
a SRA cum sunt: banda de frecvenţă, frecvenţa de rezonanţă şi valoarea de vârf a modulului.<br />
Definirea acestor indici este reamintită în figura următoare.<br />
A [dB] A [dB]<br />
3[dB] AMAX<br />
0 fINF fSUP t 0 t<br />
B = fSUP – fINF fr<br />
Fig. 2.12 Definirea benzii de frecvenţă B, a frecvenţei de rezonanţă fr şi valorii de vârf AMAX<br />
47