Aula 7 – Estabilidade de Sistemas Lineares Invariantes no Tempo
Aula 7 – Estabilidade de Sistemas Lineares Invariantes no Tempo
Aula 7 – Estabilidade de Sistemas Lineares Invariantes no Tempo

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
ANÁLISE DE SISTEMAS DE CONTROLE<br />
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL<br />
DEPARTAMENTO DE ENGENHARIA ELÉTRICA<br />
<strong>Aula</strong> 7 <strong>–</strong> <strong>Estabilida<strong>de</strong></strong> <strong>de</strong> <strong>Sistemas</strong> <strong>Lineares</strong> <strong>Invariantes</strong> <strong>no</strong> <strong>Tempo</strong><br />
Introdução<br />
<strong>Estabilida<strong>de</strong></strong> BIBO <strong>–</strong> (Boun<strong>de</strong>d Input-Boun<strong>de</strong>d Output)<br />
<strong>Estabilida<strong>de</strong></strong> Assintótica Interna<br />
Critério <strong>de</strong> <strong>Estabilida<strong>de</strong></strong> <strong>de</strong> Routh-Hurwitz<br />
Casos Especiais do Critério <strong>de</strong> <strong>Estabilida<strong>de</strong></strong> <strong>de</strong> Routh-Hurwitz<br />
Introdução<br />
No projeto <strong>de</strong> sistemas <strong>de</strong> controle realimentados, três tipos <strong>de</strong> especificações são <strong>no</strong>rmalmente<br />
utilizadas para medida <strong>de</strong> <strong>de</strong>sempenho do referido sistema, que são: resposta transitória, erro <strong>de</strong> regime<br />
permanente e estabilida<strong>de</strong>.<br />
Destas três especificações, sem dúvida, a estabilida<strong>de</strong> <strong>de</strong>tém um papel <strong>de</strong> maior importância. Se o<br />
sistema em malha-fechada apresentar características <strong>de</strong> instabilida<strong>de</strong>, requisitos <strong>de</strong> resposta transitória e<br />
medidas <strong>de</strong> erro <strong>de</strong> regime passam a ter importância secundária. Embora existam muitas <strong>de</strong>finições <strong>de</strong><br />
estabilida<strong>de</strong>, a <strong>de</strong>finição apresentada a seguir esta relacionada a classe <strong>de</strong> sistemas lineares e invariantes <strong>no</strong><br />
tempo. A resposta y(t) <strong>de</strong> sistemas dinâmicos pertencentes a esta classe, conforme (7.1), é composta pela<br />
soma das respostas forçadas e natural, i.e.<br />
y(t)<br />
= y (t) y (t)<br />
(7.1)<br />
forçada +<br />
Com base em (7.1), apresenta-se as seguintes <strong>de</strong>finições <strong>de</strong> estabilida<strong>de</strong>, instabilida<strong>de</strong> e estabilida<strong>de</strong><br />
marginal para a classe <strong>de</strong> sistemas lineares e invariantes <strong>no</strong> tempo:<br />
• Um sistema pertencente a esta classe é dito estável se sua resposta natural ten<strong>de</strong>r a zero quando o<br />
tempo ten<strong>de</strong>r ao infinito;<br />
• Um sistema pertencente a esta classe é dito instável se sua resposta natural cresce ilimitadamente<br />
quando o tempo ten<strong>de</strong>r ao infinito;<br />
• Um sistema pertencente a esta classe é dito marginalmente estável se sua resposta natural permanecer<br />
oscilando in<strong>de</strong>finidamente com amplitu<strong>de</strong> constante quando o tempo ten<strong>de</strong>r ao infinito.<br />
Em situações práticas, não é direto separar a resposta natural da resposta completa para proce<strong>de</strong>r a<br />
análise <strong>de</strong> estabilida<strong>de</strong>. Neste caso generaliza-se as <strong>de</strong>finições apresentadas anteriormente consi<strong>de</strong>rando<br />
também o comportamento da resposta forçada. Portanto, as <strong>de</strong>finições anteriores po<strong>de</strong>m ser rescritas<br />
observando somente o comportamento dos sinais <strong>de</strong> entrada e <strong>de</strong> saída do sistema (sem levar em conta o<br />
comportamento das variáveis internas do mesmo). Neste caso, observa-se a variável <strong>de</strong> saída do sistema<br />
quando este é sujeito a um sinal <strong>de</strong> entrada limitado (Boun<strong>de</strong>d Input-Boun<strong>de</strong>d Output - BIBO Stability), isto<br />
é:<br />
• Um sistema linear e invariante <strong>no</strong> tempo é dito estável <strong>no</strong> sentido BIBO se e somente se para todo o<br />
sinal <strong>de</strong> entrada u(t) limitado a saída y(t) do sistema permanecer limitada para o tempo ten<strong>de</strong>ndo ao<br />
infinito;<br />
• Um sistema linear e invariante <strong>no</strong> tempo é dito instável <strong>no</strong> sentido BIBO se e somente se para qualquer<br />
sinal <strong>de</strong> entrada u(t) limitado a saída y(t) do sistema crescer ilimitadamente para o tempo ten<strong>de</strong>ndo ao<br />
infinito;<br />
natural<br />
Professores: Luís Fernando Alves Pereira & José Felipe Haffner 1
ANÁLISE DE SISTEMAS DE CONTROLE<br />
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL<br />
DEPARTAMENTO DE ENGENHARIA ELÉTRICA<br />
• Um sistema linear e invariante <strong>no</strong> tempo é dito marginalmente estável <strong>no</strong> sentido BIBO se e somente se<br />
para <strong>de</strong>terminados sinais <strong>de</strong> entrada u(t) limitados, a variável saída y(t) do sistema crescer<br />
ilimitadamente para o tempo ten<strong>de</strong>ndo ao infinito.<br />
O último caso po<strong>de</strong> ser ilustrado consi<strong>de</strong>rando a classe <strong>de</strong> sistemas lineares invariantes <strong>no</strong> tempo que<br />
possui um par <strong>de</strong> pólos complexos puros. Para um sinal <strong>de</strong> entrada se<strong>no</strong>idal <strong>de</strong> amplitu<strong>de</strong> limitada com<br />
freqüência igual a dos pólos complexos puros, a variável <strong>de</strong> saída <strong>de</strong>ste sistema crescerá ilimitadamente.<br />
Contudo, qualquer outro sinal <strong>de</strong> entrada limitado, quando aplicado a este sistema resultará em um sinal <strong>de</strong><br />
saída limitado.<br />
<strong>Estabilida<strong>de</strong></strong> BIBO - (Boun<strong>de</strong>d Input-Boun<strong>de</strong>d Output)<br />
Um sistema é dito ter estabilida<strong>de</strong> BIBO, conforme <strong>de</strong>finido na introdução anteriormente<br />
apresentada, se para qualquer sinal limitado aplicado entrada do sistema implicar sinal <strong>de</strong> saída também<br />
limitado (in<strong>de</strong>pen<strong>de</strong>nte do que ocorre com as variáveis internas do sistema). Para formalizar a <strong>de</strong>finição <strong>de</strong><br />
estabilida<strong>de</strong> BIBO, consi<strong>de</strong>ra-se a resposta ao impulso h(t) <strong>de</strong> um sistema linear e invariante <strong>no</strong> tempo<br />
sujeito a um sinal <strong>de</strong> entrada u(t), cuja variável <strong>de</strong> saída é representada pela variável y(t), i.e.<br />
∞<br />
∫<br />
−∞<br />
y (t) = h( τ)u(t<br />
− τ)<br />
dτ<br />
(7.2)<br />
Se u(t) é limitado, então existe uma constante M tal que |u(t)|≤M
ANÁLISE DE SISTEMAS DE CONTROLE<br />
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL<br />
DEPARTAMENTO DE ENGENHARIA ELÉTRICA<br />
100000<br />
H(s) = (7.5)<br />
s + 1000<br />
Admita também que a influência do sinal <strong>de</strong> saída do alto-falante <strong>no</strong> microfone po<strong>de</strong> ser<br />
mo<strong>de</strong>lado por um ganho K que <strong>de</strong>pen<strong>de</strong> da distância entre física entre os dois elementos.<br />
Consi<strong>de</strong>rando K=0.0, 0.01 e 1, verificar se este sistema é BIBO estável.<br />
<strong>Estabilida<strong>de</strong></strong> Assintótica Interna<br />
Um outro conceito <strong>de</strong> estabilida<strong>de</strong> <strong>de</strong>vido a Lyapu<strong>no</strong>v é que a variável <strong>de</strong> saída e todas as<br />
variáveis internas do sistema sob análise nunca apresentem valores ilimitados e, adicionalmente convirjam<br />
para zero com o tempo ten<strong>de</strong>ndo a infinito, admitindo um conjunto <strong>de</strong> condições iniciais suficientemente<br />
peque<strong>no</strong>s. Para o caso específico <strong>de</strong> sistemas lineares invariantes <strong>no</strong> tempo assume-se, a título <strong>de</strong><br />
ilustração, um sistema pertencente a este classe com a seguinte equação característica:<br />
s<br />
n<br />
+ a s<br />
n−1<br />
1<br />
+ a<br />
n−2<br />
2s<br />
+ L + a = 0<br />
(7.6)<br />
Assuma, por conveniência, que as raízes {p i } da equação característica são reais ou complexas<br />
porém distintas. Note que (7.6) é a equação do <strong>de</strong><strong>no</strong>minador da função <strong>de</strong> transferência do sistema<br />
n<br />
G(s) =<br />
Y(s)<br />
U(s)<br />
b 0s<br />
=<br />
s<br />
n<br />
m<br />
+ b s<br />
+ a s<br />
m−1<br />
1<br />
n−1<br />
1<br />
+ L+<br />
b<br />
+ L+<br />
a<br />
n<br />
m<br />
=<br />
K<br />
m<br />
∏<br />
i=<br />
1<br />
n<br />
∏<br />
j=<br />
1<br />
(s − z<br />
(s − p<br />
j<br />
i<br />
)<br />
)<br />
m ≤ n<br />
(7.7)<br />
A resposta natural <strong>de</strong>ste sistema po<strong>de</strong> ser escrita na seguinte forma:<br />
n<br />
∑<br />
j<br />
y (t) = K e<br />
(7.8)<br />
j=<br />
1<br />
p t<br />
j<br />
on<strong>de</strong> {p j } são as raízes da equação (7.6) e {K i } <strong>de</strong>pen<strong>de</strong> do conjunto <strong>de</strong> condições iniciais. O sistema será<br />
dito estável se e somente se todo o termo <strong>de</strong> (7.8) ten<strong>de</strong>r a zero com t→∞:<br />
p t<br />
e j → 0 para todo p .<br />
Isto ocorrerá se todos os pólos do sistema estiverem estritamente localizados <strong>no</strong> semipla<strong>no</strong> esquerdo do<br />
pla<strong>no</strong> s, on<strong>de</strong> Re{p j } < 0. Isto é <strong>de</strong><strong>no</strong>minado <strong>de</strong> estabilida<strong>de</strong> assintótica interna que um sistemas lineares<br />
e invariantes <strong>no</strong> tempo é <strong>de</strong>terminada diretamente pela localização dos pólos <strong>no</strong> pla<strong>no</strong> s.<br />
Critério <strong>de</strong> <strong>Estabilida<strong>de</strong></strong> <strong>de</strong> Routh-Hurwitz<br />
Existem várias maneiras <strong>de</strong> se obter informações relacionadas a localização das raízes do<br />
polinômio do <strong>de</strong><strong>no</strong>minador <strong>de</strong> (7.7). Entretanto, para que seja verificada a estabilida<strong>de</strong> assintótica interna<br />
<strong>de</strong> sistemas lineares invariantes <strong>no</strong> tempo basta o conhecimento da existência <strong>de</strong> pelo me<strong>no</strong>s uma das raízes<br />
<strong>de</strong> (7.7) com parte real maior que zero.<br />
A condição necessária para que (7.7) apresente todas suas raízes <strong>no</strong> semipla<strong>no</strong> esquerdo do pla<strong>no</strong><br />
s é que todos os coeficientes {a j } sejam positivos. Esta condição é verificada por inspeção uma vez que<br />
(7.7) é composta por termos <strong>de</strong> primeira e segunda or<strong>de</strong>m, do tipo s+p e s 2 +bs+c, associados a pólos reais<br />
simples e pólos complexos conjugados <strong>de</strong> (7.7). Se algum <strong>de</strong>stes coeficientes for nulo ou negativo implica<br />
raízes <strong>de</strong> (7.7) localizadas fora do semipla<strong>no</strong> esquerdo do pla<strong>no</strong> s. Contudo, condições <strong>de</strong> suficiência que<br />
garantem a existência <strong>de</strong> pólos <strong>de</strong> (7.7) fora do semipla<strong>no</strong> esquerdo do pla<strong>no</strong> s foram propostas em dois<br />
trabalhos in<strong>de</strong>pen<strong>de</strong>ntes propostos por Routh (1874) e Hurwitz (1895). O método proposto por Routh<br />
j<br />
Professores: Luís Fernando Alves Pereira & José Felipe Haffner 3
ANÁLISE DE SISTEMAS DE CONTROLE<br />
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL<br />
DEPARTAMENTO DE ENGENHARIA ELÉTRICA<br />
requer o cálculo <strong>de</strong> uma matriz cujos elementos são funções dos coeficientes do polinômio característico do<br />
sistema que se <strong>de</strong>seja <strong>de</strong>terminar a estabilida<strong>de</strong>. Para que o sistema possua todos os pólos localizados <strong>no</strong><br />
semipla<strong>no</strong> esquerdo do pla<strong>no</strong> s, os elementos que compõe a primeira coluna <strong>de</strong>sta matriz <strong>de</strong>verão<br />
apresentar o mesmo sinal. Para exemplificar o método <strong>de</strong> estabilida<strong>de</strong> proposto por Routh-Hurwitz,<br />
consi<strong>de</strong>remos os seguinte sistema apresentado na Figura 7.2, cujos coeficientes do <strong>de</strong><strong>no</strong>minador são<br />
utilizados para composição da Tabela 7.1.<br />
U(s)<br />
a<br />
N(s)<br />
4 3 2<br />
4s<br />
+ a 3s<br />
+ a 2s<br />
+ a1s<br />
+ a 0<br />
Y(s)<br />
Fig. 7.2: Sistema empregado para exemplificar o método <strong>de</strong> Routh-Hurwitz.<br />
s 4 a 4 a 2 a 0<br />
s 3 a 3 a 1 0<br />
a<br />
a<br />
4<br />
a<br />
a<br />
2<br />
s 2 3 1<br />
3<br />
− = b1<br />
= b 2<br />
a 3<br />
a 3<br />
s 1 1 2<br />
= c1<br />
b1<br />
a<br />
3<br />
a<br />
1<br />
a<br />
4<br />
a<br />
0<br />
a 0<br />
a 3 0<br />
− − = 0<br />
a<br />
a<br />
3<br />
b b<br />
b1<br />
0<br />
b1<br />
0<br />
− − = 0 − = 0<br />
b<br />
b<br />
s 0 1<br />
= d1<br />
c1<br />
b<br />
1<br />
b<br />
2<br />
b<br />
1<br />
c 0<br />
c1<br />
0<br />
c1<br />
0<br />
− − = 0 − = 0<br />
c<br />
c<br />
Tab. 7.1: Tabela <strong>de</strong> Routh completa para o sistema apresentado na Fig. 7.2.<br />
A análise da existência <strong>de</strong> raízes do <strong>de</strong><strong>no</strong>minador do sistema apresentado na Fig. 7.2 localizadas<br />
fora do semipla<strong>no</strong> esquerdo do pla<strong>no</strong> s se faz pela verificação do sinal dos termos que compõe a primeira<br />
coluna da Tabela 7.1, isto é, dos sinais dos termos a 4 , a 3 , b 1 , c 1 e d 1 . Se todos estes termos apresentarem<br />
sinais iguais, significa que todas as raízes da equação característica do sistema sob análise estão <strong>no</strong><br />
semipla<strong>no</strong> esquerdo do pla<strong>no</strong> s e o sistema é dito absolutamente estável. Se houver algum termo<br />
pertencente a primeira coluna da Tabela 7.1 que apresente sinal diferente dos <strong>de</strong>mais, significa que existe<br />
pelo me<strong>no</strong>s uma das raízes da equação característica do sistema sob análise <strong>no</strong> semipla<strong>no</strong> direito do pla<strong>no</strong><br />
s, sendo o número total <strong>de</strong> raízes <strong>no</strong> semipla<strong>no</strong> direito <strong>de</strong> pla<strong>no</strong> s igual ao número <strong>de</strong> trocas <strong>de</strong> sinal<br />
ocorridas entre os termos da primeira coluna da Tabela 7.1.<br />
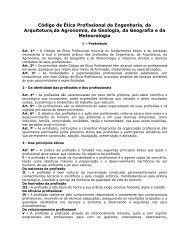
Suponha o sistema <strong>de</strong> controle apresentado na Figura 7.3. Calcule o posicionamento dos pólos do<br />
sistema operando em malha-fechada admitindo duas situações distintas para o ganho do<br />
controlador, (a) K=3 e (b) K=7.<br />
1<br />
1<br />
0<br />
0<br />
a<br />
a<br />
b<br />
4<br />
3<br />
1<br />
3<br />
1<br />
1<br />
0<br />
0<br />
0<br />
R(s) + E(s)<br />
-<br />
K<br />
controlador<br />
U(s)<br />
1<br />
s (s + 1)(s + 2)<br />
processo<br />
Y(s)<br />
Fig. 7.3: Sistema <strong>de</strong> controle realimentado com controlador do tipo proporcional.<br />
Professores: Luís Fernando Alves Pereira & José Felipe Haffner 4
ANÁLISE DE SISTEMAS DE CONTROLE<br />
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL<br />
DEPARTAMENTO DE ENGENHARIA ELÉTRICA<br />
Para os dois casos avalie a estabilida<strong>de</strong> do sistema empregando o critério <strong>de</strong> estabilida<strong>de</strong> <strong>de</strong><br />
Routh-Hurwitz.<br />
Casos Especiais do Critério <strong>de</strong> <strong>Estabilida<strong>de</strong></strong> <strong>de</strong> Routh-Hurwitz<br />
Existem dois casos especiais que po<strong>de</strong>m ocorrer quando se utiliza o critério <strong>de</strong> estabilida<strong>de</strong> <strong>de</strong><br />
Routh-Hurwitz. O primeiro <strong>de</strong>les está relacionado a existência <strong>de</strong> um termo nulo na primeira coluna da<br />
tabela <strong>de</strong> Routh. O segundo caso ocorre quando a linha inteira da tabela <strong>de</strong> Routh é constituída <strong>de</strong> zeros.<br />
No primeiro caso, uma das soluções usuais é a substituição do elemento da primeira coluna cujo<br />
valor é zero, por um valor infinitesimal ε que po<strong>de</strong> ser consi<strong>de</strong>rado negativo ou positivo. O procedimento<br />
para formação da tabela <strong>de</strong> Routh permanece inalterado, levando em conta a existência do ε para a<br />
formação das linhas restantes.<br />
Alternativamente, po<strong>de</strong>-se rescrever o polinômio característico por um polinômio que apresente<br />
raízes recíprocas, que conservarão as regiões das raízes do polinômio original e possivelmente, a tabela <strong>de</strong><br />
Routh associada ao polinômio recíproco não apresentará nenhum zero em sua primeira coluna. Consi<strong>de</strong>re<br />
então um sistema linear e invariante <strong>no</strong> tempo em cujos pólos são raízes da seguinte equação:<br />
n n−1<br />
s n 1<br />
1 0<br />
+ a − s + L + a s + a = 0<br />
(7.9)<br />
Se em (7.9) a variável s for substituída por uma variável auxiliar 1/d, então o <strong>no</strong>vo polinômio terá raízes<br />
recíprocas ao polinômio original, i.e.<br />
que po<strong>de</strong> ser rescrito na forma<br />
⎛ 1 ⎞<br />
⎜ ⎟<br />
⎝ d ⎠<br />
n<br />
n−1<br />
⎛ 1 ⎞ ⎛ 1 ⎞<br />
+ a n−1<br />
⎜ ⎟ + L + a1⎜<br />
⎟ + a 0 = 0<br />
(7.10)<br />
⎝ d ⎠ ⎝ d ⎠<br />
n−1<br />
n<br />
1+<br />
a n −1d<br />
+ L + a1d<br />
+ a 0d<br />
= 0<br />
(7.11)<br />
Comparando o polinômio original (7.9) com o seu polinômio apresentado em (7.11), conclui-se<br />
que é bastante simples a obtenção do polinômio recíproco, bastando rescrever os coeficientes do polinômio<br />
original na or<strong>de</strong>m inversa.<br />
Empregando o critério <strong>de</strong> Routh-Hurwitz, <strong>de</strong>terminar a estabilida<strong>de</strong> <strong>de</strong> um sistema que apresenta<br />
a seguinte função <strong>de</strong> transferência em malha-fechada:<br />
T(s) =<br />
s<br />
5<br />
+ 2s<br />
4<br />
+ 3s<br />
10<br />
3<br />
+ 6s<br />
2<br />
+ 5s + 3<br />
Verifique se este sistema apresenta, na formação da tabela <strong>de</strong> Routh, um elemento nulo na<br />
primeira coluna, e caso seja necessário utilize os dois métodos apresentados anteriormente.<br />
O segundo caso especial, relacionado a uma linha inteira <strong>de</strong> zeros na formação da tabela <strong>de</strong> Routh,<br />
tem um tratamento diferente daquele apresentado anteriormente, em que apenas um dos elementos da<br />
primeira coluna da tabela <strong>de</strong> Routh apresentava valor nulo. O procedimento adotado para este caso resumese<br />
a substituir a linha composta por todos os elementos zero, pela <strong>de</strong>rivada com relação a s do polinômio<br />
formado pelos coeficientes apresentados na linha anterior. De forma a ilustrar este caso especial, consi<strong>de</strong>rase<br />
a seguinte função <strong>de</strong> transferência:<br />
10<br />
T(s) = (7.12)<br />
5 4 3 2<br />
s + 7s + 6s + 42s + 8s + 56<br />
A Tabela 7.2 é formada para verificação da existência e do número <strong>de</strong> pólos <strong>de</strong> (7.12) localizadas<br />
<strong>no</strong> semipla<strong>no</strong> direito do pla<strong>no</strong> s.<br />
Professores: Luís Fernando Alves Pereira & José Felipe Haffner 5
ANÁLISE DE SISTEMAS DE CONTROLE<br />
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL<br />
DEPARTAMENTO DE ENGENHARIA ELÉTRICA<br />
s 5 1 6 8<br />
s 4 7 42 56<br />
s 3 0 0 0<br />
s 3 28 84 0<br />
s 2 21 56 0<br />
s 1 9.33333 0 0<br />
s 0 56 0 0<br />
Tab. 7.2: Tabela <strong>de</strong> Routh completa para o sistema <strong>de</strong>scrito em (7.12)<br />
Observa-se, através da Tabela 7.2 que a terceira linha é originalmente constituída por zeros, sendo<br />
representada <strong>no</strong>vamente. A <strong>no</strong>va representação foi obtida utilizando os coeficientes da linha anterior, neste<br />
caso a segunda linha, para composição do polinômio (7.13), i.e.<br />
4<br />
2<br />
P ( s)<br />
= 7s<br />
+ 42s<br />
+ 56<br />
(7.13)<br />
Os coeficientes da <strong>de</strong>rivada do polinômio (7.13) com relação a s são então empregados para a<br />
<strong>de</strong>terminação dos termos <strong>de</strong> uma <strong>no</strong>va linha na tabela <strong>de</strong> Routh que substituirá a linha composta<br />
inteiramente por zeros, ou seja<br />
dP ( s)<br />
= 28s<br />
3 84s<br />
ds<br />
+<br />
(7.14)<br />
Neste caso, os coeficientes <strong>de</strong> (7.14) foram utilizados na composição da linha utilizada para substituir a<br />
terceira linha, composta inteiramente por zeros, calculada a partir dos coeficientes originais do polinômio<br />
característico <strong>de</strong> (7.12).<br />
Exercícios:<br />
7.1) Para o circuito elétrico representado na Figura 7.4 prove analiticamente a estabilida<strong>de</strong> do sistema<br />
V o (s) / V i (s) para um sinal <strong>de</strong> entrada periódico <strong>de</strong> amplitu<strong>de</strong> limitada. Obs.: Consi<strong>de</strong>re as condições<br />
iniciais nulas e use o critério <strong>de</strong> estabilida<strong>de</strong> BIBO <strong>de</strong>finido por:<br />
R<br />
∞<br />
∫<br />
−∞<br />
| h( τ)<br />
| dτ<br />
< ∞<br />
V (t)<br />
i<br />
+<br />
-<br />
i(t)<br />
L<br />
Vo(t)<br />
Fig. 7.4: Circuito elétrico tipo RL<br />
Professores: Luís Fernando Alves Pereira & José Felipe Haffner 6
ANÁLISE DE SISTEMAS DE CONTROLE<br />
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL<br />
DEPARTAMENTO DE ENGENHARIA ELÉTRICA<br />
7.2) Consi<strong>de</strong>rando o sistema <strong>de</strong> controle da Figura 7.5, on<strong>de</strong> K é um numero real positivo, <strong>de</strong>termine a<br />
faixa <strong>de</strong> ganho em que o sistema apresenta comportamento estável :<br />
Fig. 7.5: Sistema <strong>de</strong> controle realimentado empregado <strong>no</strong> exercício 7.2.<br />
Consi<strong>de</strong>re o processo G(s) especificado por :<br />
i.<br />
G(s) =<br />
8<br />
(s + 2)(s + 4)<br />
ii.<br />
iii.<br />
32<br />
G(s) =<br />
s(s + 1)(s + 16)<br />
(s + 2)<br />
G(s) =<br />
(s − 0.5)(s + 1)(s + 16)<br />
Professores: Luís Fernando Alves Pereira & José Felipe Haffner 7
ANÁLISE DE SISTEMAS DE CONTROLE<br />
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL<br />
DEPARTAMENTO DE ENGENHARIA ELÉTRICA<br />
Professores: Luís Fernando Alves Pereira & José Felipe Haffner 8