Universidade Presbiteriana Mackenzie Automaç˜ao e Controle I
Universidade Presbiteriana Mackenzie Automaç˜ao e Controle I Universidade Presbiteriana Mackenzie Automaç˜ao e Controle I
Automação e Controle I – Aula 12P – Professor Marcio Eisencraft – julho 2006 Atividade 2 - Zona morta O efeito de uma zona morta sobre o ângulo de saída do eixo acionado por um motor com engrenagens pode ser simulado pelo sistema da Figura 3. Figura 3 - Efeito da zona morta sobre a resposta de deslocamento angular da carga (NISE, 2002). Simule este sistema, compare as curvas obtidas e explique o que ocorre. Atividade 3 - Folgas O efeito das folgas (backlash) sobre o eixo de saída acionado por um motor com engrenagens é simulado pelo sistema da Figura 4. 2
Automação e Controle I – Aula 12P – Professor Marcio Eisencraft – julho 2006 Figura 4 - Efeito da folga sobre a resposta de deslocamento angular da carga (NISE, 2002). Quando o motor inverte o sentido de rotação, o eixo de saída permanece parado no início do movimento de inversão de sentido. Quando as engrenagens finalmente ultrapassam a folga de contato, o eixo de saída começa a girar no sentido oposto. A resposta resultante é bastante diferente da resposta de um sistema linear sem folga. Simule este sistema, compare as curvas obtidas e explique o que ocorre. Exercício 1. Resolver Exercício 50 da página 176 do (NISE, 2002). 3
- Page 143 and 144: Automação e Controle 1 - Aula 1P
- Page 145 and 146: Automação e Controle 1 - Aula 1P
- Page 147 and 148: Automação e Controle 1 - Aula 2P
- Page 149 and 150: Automação e Controle 1 - Aula 2P
- Page 151 and 152: Automação e Controle 1 - Aula 2P
- Page 153 and 154: Automação e Controle 1 - Aula 2P
- Page 155 and 156: Automação e Controle 1 - Aula 3P
- Page 157 and 158: Automação e Controle 1 - Aula 3P
- Page 159 and 160: Automação e Controle 1 - Aula 3P
- Page 161 and 162: Automação e Controle 1 - Aula 4P
- Page 163 and 164: Automação e Controle 1 - Aula 4P
- Page 165 and 166: Automação e Controle 1 - Aula 4P
- Page 167 and 168: Automação e Controle 1 - Aula 5P
- Page 169 and 170: Automação e Controle I - Aula 6P
- Page 171 and 172: Automação e Controle 1 - Aula 7P
- Page 173 and 174: Automação e Controle 1 - Aula 7P
- Page 175 and 176: Automação e Controle 1 - Aula 7P
- Page 177 and 178: Automação e Controle 1 - Aula 8P
- Page 179 and 180: Automação e Controle 1 - Aula 8P
- Page 181 and 182: Automação e Controle 1 - Aula 9P
- Page 183 and 184: Automação e Controle 1 - Aula 9P
- Page 185 and 186: Automação e Controle 1 - Aula 9P
- Page 187 and 188: Automação e Controle 1 - Aula 9P
- Page 189 and 190: Automação e Controle 1 - Aula 10P
- Page 191 and 192: Automação e Controle 1 - Aula 10P
- Page 193: Automação e Controle I - Aula 12P
- Page 197 and 198: Automação e Controle 1 - Aula 14P
- Page 199 and 200: Automação e Controle 1 - Aula 14P
- Page 201 and 202: Automação e Controle I - Lista de
- Page 203 and 204: Automação e Controle I - Lista de
- Page 205 and 206: Automação e Controle I - Lista de
- Page 207 and 208: Automação e Controle I - Lista de
- Page 209 and 210: Automação e Controle I -Trabalho
- Page 211 and 212: Automação e Controle I -Trabalho
Automação e <strong>Controle</strong> I – Aula 12P – Professor Marcio Eisencraft – julho 2006<br />
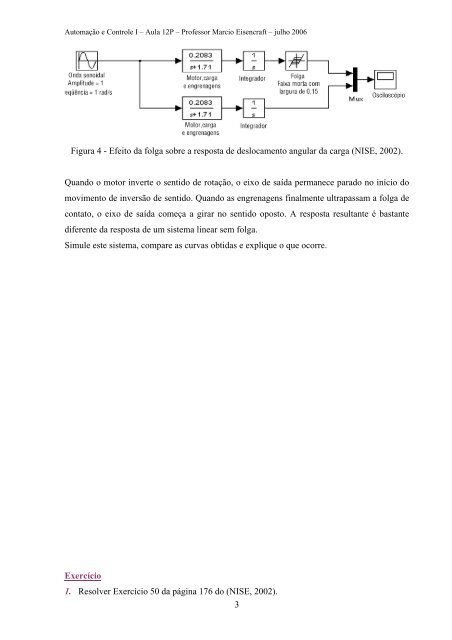
Figura 4 - Efeito da folga sobre a resposta de deslocamento angular da carga (NISE, 2002).<br />
Quando o motor inverte o sentido de rotação, o eixo de saída permanece parado no início do<br />
movimento de inversão de sentido. Quando as engrenagens finalmente ultrapassam a folga de<br />
contato, o eixo de saída começa a girar no sentido oposto. A resposta resultante é bastante<br />
diferente da resposta de um sistema linear sem folga.<br />
Simule este sistema, compare as curvas obtidas e explique o que ocorre.<br />
Exercício<br />
1. Resolver Exercício 50 da página 176 do (NISE, 2002).<br />
3


