Universidade Presbiteriana Mackenzie Automaç˜ao e Controle I
Universidade Presbiteriana Mackenzie Automaç˜ao e Controle I Universidade Presbiteriana Mackenzie Automaç˜ao e Controle I
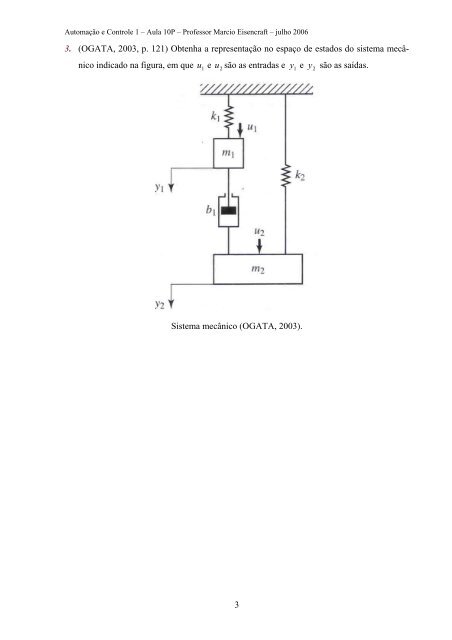
Automação e Controle 1 – Aula 10P – Professor Marcio Eisencraft – julho 2006 3. (OGATA, 2003, p. 121) Obtenha a representação no espaço de estados do sistema mecâ- nico indicado na figura, em que 1 u e 2 u são as entradas e 1 3 y e 2 Sistema mecânico (OGATA, 2003). y são as saídas.
Automação e Controle 1 – Aula 10P – Professor Marcio Eisencraft – julho 2006 4. (NISE, 2002, p.86) (2,0) Para o motor, a carga e a curva torque-velocidade mostrados na Θ L figura a seguir, obter a função de transferência, () ( s) G s = . E s 4 a ()
- Page 139 and 140: Automação e Controle 1 - Aula 1P
- Page 141 and 142: Automação e Controle 1 - Aula 1P
- Page 143 and 144: Automação e Controle 1 - Aula 1P
- Page 145 and 146: Automação e Controle 1 - Aula 1P
- Page 147 and 148: Automação e Controle 1 - Aula 2P
- Page 149 and 150: Automação e Controle 1 - Aula 2P
- Page 151 and 152: Automação e Controle 1 - Aula 2P
- Page 153 and 154: Automação e Controle 1 - Aula 2P
- Page 155 and 156: Automação e Controle 1 - Aula 3P
- Page 157 and 158: Automação e Controle 1 - Aula 3P
- Page 159 and 160: Automação e Controle 1 - Aula 3P
- Page 161 and 162: Automação e Controle 1 - Aula 4P
- Page 163 and 164: Automação e Controle 1 - Aula 4P
- Page 165 and 166: Automação e Controle 1 - Aula 4P
- Page 167 and 168: Automação e Controle 1 - Aula 5P
- Page 169 and 170: Automação e Controle I - Aula 6P
- Page 171 and 172: Automação e Controle 1 - Aula 7P
- Page 173 and 174: Automação e Controle 1 - Aula 7P
- Page 175 and 176: Automação e Controle 1 - Aula 7P
- Page 177 and 178: Automação e Controle 1 - Aula 8P
- Page 179 and 180: Automação e Controle 1 - Aula 8P
- Page 181 and 182: Automação e Controle 1 - Aula 9P
- Page 183 and 184: Automação e Controle 1 - Aula 9P
- Page 185 and 186: Automação e Controle 1 - Aula 9P
- Page 187 and 188: Automação e Controle 1 - Aula 9P
- Page 189: Automação e Controle 1 - Aula 10P
- Page 193 and 194: Automação e Controle I - Aula 12P
- Page 195 and 196: Automação e Controle I - Aula 12P
- Page 197 and 198: Automação e Controle 1 - Aula 14P
- Page 199 and 200: Automação e Controle 1 - Aula 14P
- Page 201 and 202: Automação e Controle I - Lista de
- Page 203 and 204: Automação e Controle I - Lista de
- Page 205 and 206: Automação e Controle I - Lista de
- Page 207 and 208: Automação e Controle I - Lista de
- Page 209 and 210: Automação e Controle I -Trabalho
- Page 211 and 212: Automação e Controle I -Trabalho
Automação e <strong>Controle</strong> 1 – Aula 10P – Professor Marcio Eisencraft – julho 2006<br />
3. (OGATA, 2003, p. 121) Obtenha a representação no espaço de estados do sistema mecâ-<br />
nico indicado na figura, em que 1 u e 2 u são as entradas e 1<br />
3<br />
y e 2<br />
Sistema mecânico (OGATA, 2003).<br />
y são as saídas.


