Meetsystemen
Deel III Meetgrootheden 14 Positiemeting Positiemeetsystemen vormen een belangrijke component in iedere NC-machine. De nauwkeurigheid van de NC-machine wordt in eerste instantie bepaald door de nauwkeurigheid van de positiemeting of wegmeting. Wat gemeten wordt is de stand van het werkstuk t.o.v. het werktuig, dus niet de eigenlijke afmetingen van het werkstuk. 14.1 Indeling van het positiemeetsysteem De meetsystemen (en de regelkring) onderscheiden zich door vier eigenschappen: open Ù gesloten kring direct Ù indirect analoog Ù digitaal absoluut Ù incrementeel Open en gesloten kring Figuur 3.1 geeft een voorbeeld van een open kring systeem. Alleen door middel van de weginformatie moet het systeem precies de gevraagde stand bereiken. Dit wordt verwezenlijkt met een elektrische stappenmotor al dan niet met een hydraulische versterking. Slede Weginformatie Stuur- Informatie Motor Stand Kogelomloopspil Stappenmotor Figuur 3.1: Open kring: Schematisch en voorbeeld. __________ - III.1 - Johan Baeten
Meetsystemen: Meetgrootheden Positiemeting Voordelen: technologisch eenvoudig geen meetsysteem, geen comparator Nadelen: voor een elektrische stappenmotor is er een vermogensturing nodig, welke duurder is naarmate het gewenste vermogen groter is; bij een elektrische stappenmotor met hydraulische versterker is een hydraulische groep nodig; stappenmotorsturing is trager dan gesloten-kring-regeling. Figuur 3.2 geeft de gesloten-kring-regeling weer. Indien er in de regelkring een grote versterking aanwezig is, wordt dit ook een servosysteem genoemd. Bij CNC-machines is dit meestal het geval omdat grote massa's nauwkeurig gepositioneerd moeten worden. Meetsysteem Stuur- Informatie + - Meetinfo Motor Stand Meetsysteem Vergelijker Kogelomloopspil Figuur 3.2: Gesloten kring: Schematisch en voorbeeld. Gelijkstroommotor Meetplaats: direct versus indirect meten Bij cartesiaanse machines met translerende sleden (alle gereedschapswerktuigen en sommige industriële robots) zijn er twee plaatsen waar de sledepositie kan worden gemeten: direct, aan de slede. Hiervoor is een lineair meetsysteem nodig. indirect, via de schroefspil. Hierbij wordt een roterende positiemeetopnemer gebruikt die op de spil of achterop de servomotor gemonteerd is. Indirect Direct X c + - Voeding Servomotor θ Overbrenging Schroefspil Slede X w X w Roterend Meetsysteem θ X w Lineair Meetsysteem Figuur 3.3: Indirecte versus directe positiemeting. Roterende positiemeetsystemen zijn goedkoper dan lineaire meetsystemen. Daartegenover staat dat indirect meten onnauwkeuriger is: er wordt via de schroefspil en soms ook via een overbrenging gemeten. Hierbij worden twee functies met tegenstrijdige eisen gecombineerd: enerzijds moeten overbrenging en schroefspil grote krachten kunnen overbrengen; anderzijds fungeert de spil als nauwkeurige meetstandaard. __________ - III.2 - Johan Baeten
- Page 81 and 82: Meetsystemen: Meetprincipes Inducti
- Page 83 and 84: Meetsystemen: Meetprincipes Inducti
- Page 85 and 86: Meetsystemen: Meetprincipes Opto-el
- Page 87 and 88: Meetsystemen: Meetprincipes Opto-el
- Page 89 and 90: Meetsystemen: Meetprincipes Opto-el
- Page 91 and 92: Meetsystemen: Meetprincipes Opto-el
- Page 93 and 94: Meetsystemen: Meetprincipes Opto-el
- Page 95 and 96: Meetsystemen: Meetprincipes Opto-el
- Page 97 and 98: Meetsystemen: Meetprincipes Opto-el
- Page 99 and 100: Meetsystemen: Meetprincipes Opto-el
- Page 101 and 102: Meetsystemen: Meetprincipes Opto-el
- Page 103 and 104: Meetsystemen: Meetprincipes Opto-el
- Page 105 and 106: Meetsystemen: Meetprincipes Opto-el
- Page 107 and 108: Meetsystemen: Meetprincipes Piëzo-
- Page 109 and 110: Meetsystemen: Meetprincipes Piëzo-
- Page 111 and 112: Meetsystemen: Meetprincipes Piëzo-
- Page 113 and 114: Meetsystemen: Meetprincipes Piëzo-
- Page 115 and 116: Meetsystemen: Meetprincipes Piëzo-
- Page 117 and 118: Meetsystemen: Meetprincipes Piëzo-
- Page 119 and 120: Meetsystemen: Meetprincipes Ultraso
- Page 121 and 122: Meetsystemen: Meetprincipes Ultraso
- Page 123 and 124: Meetsystemen: Meetprincipes Ultraso
- Page 125 and 126: Meetsystemen: Meetprincipes Ultraso
- Page 127 and 128: Meetsystemen: Meetprincipes Ultraso
- Page 129 and 130: Meetsystemen: Meetprincipes Ultraso
- Page 131: Meetsystemen: Meetprincipes Chemisc
- Page 135 and 136: Meetsystemen: Meetgrootheden Positi
- Page 137 and 138: Meetsystemen: Meetgrootheden Positi
- Page 139 and 140: Meetsystemen: Meetgrootheden Positi
- Page 141 and 142: Meetsystemen: Meetgrootheden Positi
- Page 143 and 144: Meetsystemen: Meetgrootheden Positi
- Page 145 and 146: Meetsystemen: Meetgrootheden Positi
- Page 147 and 148: Meetsystemen: Meetgrootheden Positi
- Page 149 and 150: Meetsystemen: Meetgrootheden Positi
- Page 151 and 152: Meetsystemen: Meetgrootheden Positi
- Page 153 and 154: Meetsystemen: Meetgrootheden Positi
- Page 155 and 156: Meetsystemen: Meetgrootheden Drukme
- Page 157 and 158: Meetsystemen: Meetgrootheden Drukme
- Page 159 and 160: Meetsystemen: Meetgrootheden Drukme
- Page 161 and 162: Meetsystemen: Meetgrootheden Temper
- Page 163 and 164: Meetsystemen: Meetgrootheden Temper
- Page 165 and 166: Meetsystemen: Meetgrootheden Temper
- Page 167 and 168: Meetsystemen: Meetgrootheden Temper
- Page 169 and 170: Meetsystemen: Meetgrootheden Temper
- Page 171 and 172: Meetsystemen: Meetgrootheden Temper
- Page 173 and 174: Meetsystemen: Meetgrootheden Temper
- Page 175 and 176: Meetsystemen: Meetgrootheden Niveau
- Page 177 and 178: Meetsystemen: Meetgrootheden Niveau
- Page 179 and 180: Meetsystemen: Meetgrootheden Niveau
- Page 181 and 182: Meetsystemen: Meetgrootheden Niveau
<strong>Meetsystemen</strong>: Meetgrootheden<br />
Positiemeting<br />
Voordelen:<br />
technologisch eenvoudig<br />
geen meetsysteem, geen comparator<br />
Nadelen:<br />
voor een elektrische stappenmotor is er een vermogensturing nodig, welke duurder is<br />
naarmate het gewenste vermogen groter is;<br />
bij een elektrische stappenmotor met hydraulische versterker is een hydraulische groep nodig;<br />
stappenmotorsturing is trager dan gesloten-kring-regeling.<br />
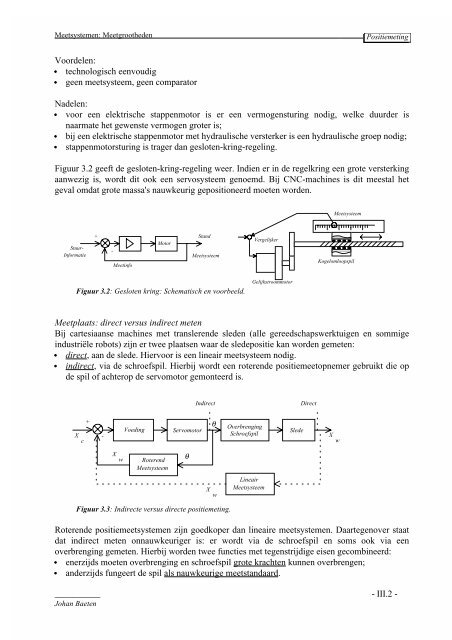
Figuur 3.2 geeft de gesloten-kring-regeling weer. Indien er in de regelkring een grote versterking<br />
aanwezig is, wordt dit ook een servosysteem genoemd. Bij CNC-machines is dit meestal het<br />
geval omdat grote massa's nauwkeurig gepositioneerd moeten worden.<br />
Meetsysteem<br />
Stuur-<br />
Informatie<br />
+<br />
-<br />
Meetinfo<br />
Motor<br />
Stand<br />
Meetsysteem<br />
Vergelijker<br />
Kogelomloopspil<br />
Figuur 3.2: Gesloten kring: Schematisch en voorbeeld.<br />
Gelijkstroommotor<br />
Meetplaats: direct versus indirect meten<br />
Bij cartesiaanse machines met translerende sleden (alle gereedschapswerktuigen en sommige<br />
industriële robots) zijn er twee plaatsen waar de sledepositie kan worden gemeten:<br />
direct, aan de slede. Hiervoor is een lineair meetsysteem nodig.<br />
indirect, via de schroefspil. Hierbij wordt een roterende positiemeetopnemer gebruikt die op<br />
de spil of achterop de servomotor gemonteerd is.<br />
Indirect<br />
Direct<br />
X<br />
c<br />
+<br />
-<br />
Voeding<br />
Servomotor<br />
θ<br />
Overbrenging<br />
Schroefspil<br />
Slede<br />
X<br />
w<br />
X<br />
w<br />
Roterend<br />
Meetsysteem<br />
θ<br />
X<br />
w<br />
Lineair<br />
Meetsysteem<br />
Figuur 3.3: Indirecte versus directe positiemeting.<br />
Roterende positiemeetsystemen zijn goedkoper dan lineaire meetsystemen. Daartegenover staat<br />
dat indirect meten onnauwkeuriger is: er wordt via de schroefspil en soms ook via een<br />
overbrenging gemeten. Hierbij worden twee functies met tegenstrijdige eisen gecombineerd:<br />
enerzijds moeten overbrenging en schroefspil grote krachten kunnen overbrengen;<br />
anderzijds fungeert de spil als nauwkeurige meetstandaard.<br />
__________ - III.2 -<br />
Johan Baeten


