Rijdynamica van motorvoertuigen (7) - Timloto
Rijdynamica van motorvoertuigen (7) - Timloto
Rijdynamica van motorvoertuigen (7) - Timloto

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Rijdynamica</strong> <strong>van</strong> <strong>motorvoertuigen</strong> (7)<br />
E. Gernaat (ISBN 978-90-808907-8-7)<br />
1 Stuurinrichtingen<br />
1.1 Achtergrond en indeling<br />
Ook stuurinrichtingssystemen maken een continu proces <strong>van</strong> verbeteringen<br />
en aanpassingen door 1 . Intelligente bekrachtigingssystemen gaan een steeds<br />
grotere rol spelen in veiligheid en weggedrag. Adaptieve of zelfsturende inrichtingen<br />
zijn in ontwikkeling. Al sinds vele jaren zijn de eisen die men mag<br />
stellen aan een stuurinrichting vastgelegd. Bij bedrijfswagens wordt gesteld dat<br />
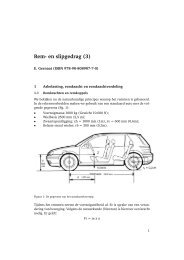
de stuurkracht de 250 N niet mag overschrijden (fig. 1). Dit geldt voor het<br />
ingaan <strong>van</strong> een bocht met een straal <strong>van</strong> 12 meter. Hierbij moet <strong>van</strong>uit de<br />
rechtuitstand de vereiste stuuruitslag in ongeveer 4 sec. worden bereikt bij een<br />
snelheid <strong>van</strong> ongeveer 10 km/h. Tot een aantal jaren geleden werden voor de<br />
Figuur 1: In een standaard bocht met een straal <strong>van</strong> 12 m mag een stuurkracht <strong>van</strong> 250 N niet<br />
worden overschreden (tekening ZF).<br />
kleinere personenwagens stuurinrichtingen gebruikt zonder bekrachtiging en<br />
voor bedrijfswagens stuurinrichtingen met (hydraulische) bekrachtiging. Nu is<br />
1. Op dit werk is de Creative Commons Licentie <strong>van</strong> toepassing<br />
1
ekrachtiging zelfs bij kleine personenwagens standaard. Mechanische stuurinrichtingen<br />
werden <strong>van</strong> oudsher verdeeld in:<br />
• indirecte stuurinrichtingen met stuurhuis en Pitman-arm;<br />
• directe stuurinrichtingen met rondsel en tandheugel.<br />
Beide systemen worden nog volop toegepast maar uitsluitend met bekrachtiging.<br />
De indirecte stuurinrichting, hoofdzakelijk toegepast bij bedrijfswagens<br />
maar in eerste instantie ook bij personenwagens, kan worden onderverdeeld<br />
in verschillende typen als worm met gedeeld wormwiel al dan niet met kogels<br />
of een schroef en nok systeem of een wormwiel met rol. De rol kan dan<br />
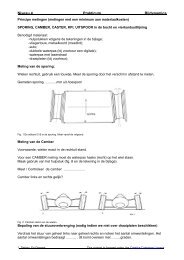
weer bestaan uit twee of drie tanden (fig. 2). De uitslag <strong>van</strong> de pitman-arm<br />
Figuur 2: Indirecte, niet bekrachtigde, stuurinrichting met wormwiel en rol. Linksboven: conisch<br />
wormwiel. Middenboven: rol met twee en drie tanden. Onder: compleet stuurhuis (foto’s: ZF).<br />
1. Instelflens lengtespeling 2. behuizing 3. stuuras 4. kogellagers 5. conisch wormwiel 6. rol met<br />
drie tanden 7. pitmanarm 8. pitmanas<br />
is bij deze systemen ongeveer 90 0 met een maximale stuurasbelasting tussen<br />
de 7000 en 5000 N. Deze stuurinrichtingen werken volkomen spelingsvrij en<br />
kunnen eenvoudig worden afgesteld (fig.3). De directe stuurinrichting bestaat<br />
uit een tandheugel en een rondsel. Dit is eigenlijk de standaard stuurinricht-<br />
2
Figuur 3: Met de stelmoer aan de onderzijde kan de stuurspeling worden ingesteld (foto ZF).<br />
ing voor personenwagens geworden. De overbrengverhouding wordt bepaald<br />
door de diameter <strong>van</strong> het rondsel. Er zijn diverse constructieve uitvoeringen<br />
(fig. 4). Een bijzondere uitvoering is een mechanische directe stuurinrichting<br />
met variabele overbrengverhouding (Fig. 5). De tandheugel is bij een dergelijke<br />
constructie uitgevoerd met tanden waar<strong>van</strong> de moduul (afstand tussen de<br />
tanden) variëert. Hierdoor is de wielverdraaiing in de middenstand het grootst<br />
en wordt kleiner bij verdere stuuruitslag. Dit betekent volgens grafiek 5 (onder)<br />
een redelijk constant stuurmoment bij stilstaand voertuig.<br />
2 Stuurbekrachtiging<br />
De klassieke hydraulische stuurbekrachting <strong>van</strong> een directe stuurinrichting<br />
bestaat uit een door de verbrandingsmotor aangedreven hydraulische pomp<br />
waar<strong>van</strong> de druk wordt afgeregeld. Tussen de stuuras (de as waar het stuurwiel<br />
aan vast zit) en het rondsel bevindt zich een torsiestaafje. Het torsiestaafje<br />
maakt het mogelijk dat de stuuras t.o.v. het rondsel een klein beetje kan verdraaien.<br />
Door deze kleine verdraaiing wordt een draaischuif bediend die er dan<br />
voor zorgt dat hydraulische olie onder druk naar de linker of rechterzijde <strong>van</strong> de<br />
bekrachtigingplunger kan stromen. Bekrachtigingscilinder en tandheugel vormen<br />
één geheel (fig. 6).<br />
3
Figuur 4: Twee uitvoeringen <strong>van</strong> een directe stuurinrichting. c) Opstelling <strong>van</strong> een directe stuurinrichting<br />
op de auto (foto’s en tekening ZF).<br />
4
Figuur 5: Verdraaiing <strong>van</strong> de wielen in relatie tot het stuurkoppel bij een variabele overbrenging<br />
<strong>van</strong> een directe stuurinrichting (tekeningen ZF).<br />
5
Figuur 6: Boven: Klassieke hydraulische bekrachtiging <strong>van</strong> een directe stuurinrichting. Midden:<br />
Opstelling <strong>van</strong> componenten voor de hydraulische bekrachtiging. De draaischuif is hier apart<br />
getekend maar bevindt zich in rondselhuis. Onder: Het torsiestaafje met rondsel (ZF).<br />
6
2.1 Werking <strong>van</strong> de draaischuifklep<br />
Fig. 7 geeft schematisch de werking <strong>van</strong> de draaischuifklep weer. Als het stuur<br />
verdraaid wordt, wordt het middelste centrale gedeelte t.o.v. het buitenste<br />
gedeelte door de werking <strong>van</strong> de torsiestaaf (geheel in het midden getekend)<br />
een klein stukje naar links of naar rechts verdraaid. Dit is voldoende om de<br />
juiste openingen met elkaar te verbinden. Als er bekrachtiging plaats vindt, dan<br />
zal de olie <strong>van</strong>af de pomp naar één kant <strong>van</strong> de plunjer stromen terwijl de olie<br />
<strong>van</strong> de andere zijde retour stroomt. De verbindingen <strong>van</strong> de openingen zorgen<br />
hiervoor. Ook de combinatie <strong>van</strong> bekrachtiging en variabele overbrenging is niet<br />
Figuur 7: Bekrachting <strong>van</strong> het stuurmechanisme naar links. Het roterende schuifmechanisme<br />
laat olie onder druk aan de rechterzijde <strong>van</strong> de plunjer toe. Aan de linker zijde stroomt de olie<br />
retour (tekening ZF).<br />
ongebruikelijk. Zie hiervoor fig. 8. De tandheugel beïnvloedt de overbrengverhouding<br />
omdat de tandvorm over de tandheugellengte geleidelijk verandert. Bij<br />
de Toyota Landcruiser (2002) wordt de overbrengverhouding <strong>van</strong>uit de middenstand<br />
kleiner doordat de verplaatsing <strong>van</strong> de tandheugel groter wordt. De<br />
grotere stuurkracht die hiervoor nodig zou zijn wordt door de bekrachtiging<br />
gecompenseerd.<br />
7
Figuur 8: Directe stuurinrichting met bekrachtiging en variabele overbrengverhouding <strong>van</strong> de<br />
Toyota Landcruiser (tekening Toyota).<br />
8
3 De stuurvertraging<br />
De stuurvertraging is de verhouding tussen het aantal graden dat het stuurwiel<br />
verdraait en de verdraaiing <strong>van</strong> de wielen. Gemiddeld draait het stuurwiel 2,5<br />
tot 3 omwentelingen bij een wielverdraaiing <strong>van</strong> ongeveer 60 0 . Dit betekent<br />
een ’vertragingsrichtwaarde’ <strong>van</strong><br />
(3 x 360 0 ) / 60 0 = 18 of i = 18<br />
Wanneer we de gegevens <strong>van</strong> een aantal personenwagens opzoeken, dan zien<br />
we de volgende waarden:<br />
• Audi A3<br />
– i = 16,2;<br />
– omw. stuurwiel 3;<br />
– draaicirkel 10,7;<br />
– wielbasis 2578 mm.<br />
• BMW 120D<br />
– i = 14,3;<br />
– omw. stuurwiel 3;<br />
– draaicirkel 10,4;<br />
– wielbasis 2660 mm.<br />
• Fiat Idea<br />
– i = 13,9;<br />
– omw. stuurwiel 2,75;<br />
– draaicirkel 10,7;<br />
– wielbasis 2508 mm.<br />
• Volvo S80<br />
– i = 16,0<br />
– omw. stuurwiel 2,75<br />
– draaicirkel 12,3<br />
– wielbasis 2835 mm<br />
De stuurvertraging ’i’ is wel een gemiddelde waarde. Tijdens de verdraaiing<br />
zal de i-waarde kunnen variëren (fig. 9). Een eventuele variabele stuuroverbrenging<br />
en het omzetten <strong>van</strong> de roterende beweging in een rechtlijnige en<br />
vervolgens weer omzetten in een wielverdraaiing veroorzaken deze variatie.<br />
Ook verdraait ten gevolge <strong>van</strong> het Ackermann principe het binnenste wiel meer<br />
dan het buitenste. Er wordt dan gewerkt met een gemiddelde verdraaiinghoek<br />
αgem. = (α1 + α2) / 2.<br />
De stuurvertraging geeft een stuurgevoel. Drie omwentelingen <strong>van</strong> het stuurwiel<br />
voor de kleinste draaicirkel wordt kennelijk als prettig ervaren. Tijdens<br />
het rechtuit rijden stellen we een meer directe stuurreactie op prijs, over het<br />
algemeen mag de vertraging dan minder zijn.<br />
Bij onbekrachtigde stuurinrichtingen is er ook nog een relatie tussen de stuurvertraging<br />
en de stuurkracht of het benodigde stuurkoppel. Om het stuur<br />
9
Figuur 9: Variatie in de stuuroverbrenging bij een wieluitslag <strong>van</strong> geheel links naar geheel rechts<br />
bij een Audi 80 GL (Reimpell).<br />
niet al te zwaar te laten draaien, hebben we een grote vertraging nodig bij het<br />
maneuvreren. Een kleine vertraging bij het rechtuitrijden maakt dat de auto<br />
stabieler aanvoelt. De grootte <strong>van</strong> de stuurkracht zal natuurlijk in relatie staan<br />
tot het gewicht <strong>van</strong> de gestuurde as. Het gaat hier immers over het overwinnen<br />
<strong>van</strong> de wrijvingscoëfficiënt tussen band en wegdek <strong>van</strong> de sturende wielen.<br />
Wanneer we naar het stuurhuis zelf kijken, zien we dat er bij indirecte stuurinrichtingen<br />
een roterende beweging ingaat (het stuurwiel) en er ook een<br />
roterende beweging uitkomt (de pitmanarm). De vertraging <strong>van</strong> het stuurhuis<br />
kan dan eenvoudig worden vastgesteld. Bij bedrijfswagens is de ’i’ <strong>van</strong> het stuurhuis<br />
ongeveer 20. Ongeveer 5 omwentelingen <strong>van</strong> het stuurwiel tegenover<br />
90 0 verdraaiing <strong>van</strong> de pitmanarm. Bij directe stuurinrichtingen is de vertraging<br />
<strong>van</strong> het rondsel en de tandheugel op deze wijze niet vast te stellen. Wel is<br />
het zo dat de grootte <strong>van</strong> het rondsel de grootte <strong>van</strong> de vertraging bepaalt. Door<br />
het invoeren <strong>van</strong> stuurbekrachtiging is de relatie tussen vertraging en stuurkoppel<br />
komen te vervallen. Ook zien we dat bij systemen met stuurbekrachtiging<br />
de vertraging veelal kleiner is. Vergelijk:<br />
• Toyota Yaris zonder stuurbekrachtiging:<br />
i = 21,8. Aantal omwentelingen stuurwiel 3,8;<br />
• Toyota Yaris met stuurbekrachtiging:<br />
i = 19,0. Aantal omwentelingen stuurwiel 3,3.<br />
Het algemene probleem bij stuurbekrachtiging is dat we een grote bekrachtiging<br />
willen hebben bij het maneuvreren en dat naarmate de snelheid toeneemt<br />
de bekrachtiging af mag nemen. Dit heeft geleid tot snelheidsafhankelijke stuurbekrachtigingen.<br />
10
3.1 Rekenvoorbeeld: De stuuroverbrengverhouding<br />
Als voorbeeld de Mini Cooper Cabrio. Deze heeft een directe stuurinrichting<br />
met hydraulische (servo) bekrachtiging. Verdere gegevens:<br />
• Overbrengverhouding i = 13,2;<br />
• Het aantal stuurwielomwentelingen bedraagt 2,5 (de spoorbreedte<br />
bedraagt 1460 mm);<br />
• Wielbasis 2467 mm;<br />
• Draaicirkel 11 meter.<br />
Controle berekening<br />
De wielen verdraaien <strong>van</strong> geheel links naar geheel rechts:<br />
(2,5 omw. x 360 0 ) / 13,2 = 68 0<br />
Dit betekent een halve wielverdraaiing (<strong>van</strong> rechtuit naar links of rechts) <strong>van</strong><br />
34 0 . Het is dan verantwoord om aan te nemen dat het binnenste wiel 34 0 en het<br />
buitenste wiel 30 0 verdraaid. Deze wielverdraaiing zou een draaicirkel <strong>van</strong> 11<br />
meter mogelijk moeten maken De draaicirkel heeft betrekking op het buitenste<br />
gestuurde wiel. Het buitenste wiel heeft dan een stuurstraal <strong>van</strong> 5,5 meter of<br />
5500 mm. Met behulp <strong>van</strong> de wielbasis kan nu de sinus <strong>van</strong> de hoek worden<br />
berekend. Deze is:<br />
sinstuurhoek = 2467/5500 = 0,45<br />
Zie fig. 10. De gestuurde hoek bedraagt dan 27 0 . De afwijking kan worden<br />
verklaard uit de afronding <strong>van</strong> de gegevens en de aannames.<br />
Figuur 10: Wanneer de de wielbasis weten en de straal <strong>van</strong> de bocht dan kan met behulp <strong>van</strong> de<br />
sinus de wielverdraaiingshoek worden berekend.<br />
11
4 Vragen en opgaven<br />
1. Wat is de maximale stuurkracht die uitgeoefend mag worden bij een<br />
bedrijfswagen?<br />
2. Omschrijf beknopt het verschil tussen een directe en een indirecte stuurinrichting.<br />
3. Bij indirecte stuurhuizen zijn er twee (hoofd)afstelmogelijkheden. Welke?<br />
4. Verklaar waarom de overbrengverhouding <strong>van</strong> een directe stuurinrichting<br />
in feite bepaald wordt door de diameter <strong>van</strong> het rondsel.<br />
5. Op welke wijze kan men een variabele overbrengverhouding <strong>van</strong> een directe<br />
stuurinrichting realiseren?<br />
6. Wat is de functie <strong>van</strong> het torsiestaafje bij stuurbekrachtigingen?<br />
7. Geeft in fig. 6 met behulp <strong>van</strong> pijlen de retourstroom <strong>van</strong> de olie aan.<br />
8. Wat valt op wanneer we de variabele stuuroverbrenging <strong>van</strong> fig. 5 vergelijken<br />
met de variabele overbrengverhouding <strong>van</strong> Toyota (fig. 8)?<br />
9. Geef aan hoeveel graden het stuurwiel bij de gemiddelde personenwagen<br />
kan worden verdraaid.<br />
10. Geef aan hoeveel graden de wielen (gemiddeld) maximaal kunnen verdraaien.<br />
11. Hoeveel bedraagt de stuurvertraging gemiddeld?<br />
12. Tussen welke waarden variëert de stuurvertraging in fig. 9?<br />
13. Noem twee oorzaken waarom een stuurvertraging niet constant behoeft<br />
te zijn.<br />
14. Bereken de maximale wielverdraaiing <strong>van</strong> de Toyota Yaris met en zonder<br />
stuurbekrachtiging. Zoek de gegevens in de tekst op.<br />
15. Controleer met behulp <strong>van</strong> de gegevens in de tekst de maximale wielverdraaiing<br />
<strong>van</strong> de Fiat Idea. Maak hiervoor gebruik <strong>van</strong> het rekenvoorbeeld.<br />
12