Rijdynamica van motorvoertuigen (4) - Timloto
Rijdynamica van motorvoertuigen (4) - Timloto
Rijdynamica van motorvoertuigen (4) - Timloto

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Rijdynamica</strong> <strong>van</strong> <strong>motorvoertuigen</strong> (4)<br />
E. Gernaat (ISBN 978-90-808907-8-7)<br />
1 Stabilisatoren<br />
1.1 Dwarsstabiliteit <strong>van</strong> het voertuig<br />
Onder de dwarsstabiliteit verstaat men de weerstand tegen het overhellen<br />
<strong>van</strong> de bovenbouw wanneer hier zijdelingse krachten op werken (centrifugaalkracht<br />
bocht, zijwindkracht) 1 . Het overhellen of rollen <strong>van</strong> de bovenbouw<br />
geschiedt langs een langsas, de zgn. rolas. De rolas is de verbindingslijn tussen<br />
twee vaste punten die we het rolcentrum <strong>van</strong> de voor- resp. achterwielophanging<br />
noemen (Mv en Ma). Het rolcentrum verandert echter afhankelijk <strong>van</strong> de<br />
belasting, veeruitslag en het type wielophanging. Bij moderne auto’s ligt de<br />
rolas meestal iets onder het hart <strong>van</strong> de wielen en bijna evenwijdig aan het<br />
wegdek. Wanneer we de zijdelingse kracht, aangrijpend in het zwaartepunt <strong>van</strong><br />
de bovenbouw, vermenigvuldigen met de afstand tot de rolas vinden we het rolmoment.<br />
Een veel toegepaste methode om het rollen <strong>van</strong> de bovenbouw tegen<br />
te gaan is het aanbrengen <strong>van</strong> stabilisatoren. Ook de schokdempers beperken<br />
het rollen <strong>van</strong> de auto.<br />
2 Rolcentrum (M)<br />
Het rolcentrum wordt bepaald <strong>van</strong>uit het poolpunt P <strong>van</strong> de vering. Vanuit dit<br />
punt P wordt een lijn getrokken met het raakpunt wiel-wegdek. Het snijpunt<br />
<strong>van</strong> deze lijn met de hartlijn <strong>van</strong> het voertuig vormt het rolcentrum M. Het<br />
rolcentrum is dus afhankelijk <strong>van</strong> de constructie <strong>van</strong> de wielophanging en de<br />
veeruitslag (belasting). Fig. 1 geeft een voorbeeld voor de bepaling <strong>van</strong> het<br />
poolpunt <strong>van</strong> een McPhersonveerpoot. Fig. 2 geeft als tweede voorbeeld de<br />
bepaling <strong>van</strong> het poolpunt P en het momentencentrum M <strong>van</strong> een wielophanging<br />
met schuingeplaatste dwarsarmen. Wanneer het rolcentrum <strong>van</strong> de vooren<br />
achteras is bepaald, dan kan de rolas worden geconstrueerd door de beide<br />
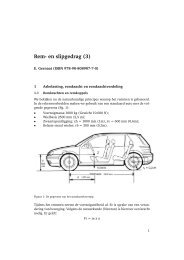
rolcentra met elkaar te verbinden. In fig. 3 is dat gedaan door de verbindingslijn<br />
tussen Mv en Ma te trekken. De afstand tussen het zwaartepunt <strong>van</strong> de opbouw<br />
Z en de rolas vormt de rolarm. De rolarm vermenigvuldigt met de dwarskracht<br />
veroorzaakt het rolmoment.<br />
1. Op dit werk is de Creative Commons Licentie <strong>van</strong> toepassing<br />
1
Figuur 1: Bepaling <strong>van</strong> het rolcentrum (M) <strong>van</strong> een McPhersonveerpoot. Vanuit het poolpunt P<br />
wordt een lijn getrokken naar het midden <strong>van</strong> de band op het wegdek. Het punt M bevindt zich<br />
dan op de verticale hartlijn <strong>van</strong> het voertuig (Reimpell).<br />
Figuur 2: Bepaling <strong>van</strong> het poolpunt P en het rolcentrum M bij een wielophanging met schuingeplaatste<br />
dwarsarmen (Reimpell).<br />
Figuur 3: Een dwarskracht aangrijpend in het zwaartepunt <strong>van</strong> de bovenbouw vermenigvuldigt<br />
met de rolarm veroorzaakt het rolmoment <strong>van</strong> het voertuig.<br />
2
3 Stabilisator<br />
Stabilisatoren verminderen de rolneiging <strong>van</strong> het voertuig en verbeteren het<br />
bochtgedrag. Bij auto’s met een hoge opbouw en bij snel gereden bochten kan<br />
de rolneiging zo sterk zijn dat omslaan mogelijk is. De stabilisatorstang bij personenwagens<br />
is een ronde stang met een diameter tussen de 10 en 20 mm.<br />
De stabilisatorstangen verbinden het linker- en het rechterwiel <strong>van</strong> dezelfde as<br />
en worden op torsie belast. De mate <strong>van</strong> tordering wordt in grote mate door<br />
de diameter bepaald. Conventioneel is de stabilisator in het midden in rubberelementen<br />
aan het chassis (hulpframe) verbonden. De einden <strong>van</strong> de stabilisator<br />
zijn direct of via een in rubber gelagerd draaipunt met de draagarmen<br />
verbonden. Hierdoor ontstaat weer een gedeeltelijk afhankelijke wielophanging.<br />
In de bocht drukt de carrosserie zwaar op de buitenste veren waardoor de<br />
stabilisatorstangen de binnenste wielen omhoogtrekken. Op deze manier wordt<br />
een sterk overhellen voorkomen. Fig. 4 laat twee stabilisatoropstellingen zien.<br />
Fig. 5 laat het rollen <strong>van</strong> de auto in een bocht zien. De stabilisator beperkt het<br />
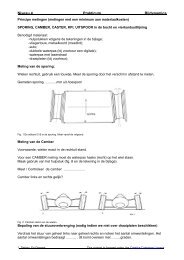
Figuur 4: Twee opstellingen <strong>van</strong> stabilisatoren. In de bovenste figuur betreft het een achterwielophanging<br />
<strong>van</strong> een Toyota Avensis. In de onderste figuur gaat het om de voorwielophanging <strong>van</strong><br />
een Golf 5.<br />
3
overhellen maar voorkomt deze niet.<br />
Figuur 5: Onder invloed <strong>van</strong> de stabilisator wordt de rolneiging <strong>van</strong> de auto in de bocht beperkt.<br />
4 Actieve stabilisatoren<br />
Het overhellen in de bocht is een ongewenste rijeigenschap. Fabrikanten zoeken<br />
naar middelen om de rolneiging <strong>van</strong> het voertuig verder terug te brengen. Een<br />
oplossing is de toepassing <strong>van</strong> een actieve stabilisator. Deze bestaat uit een vast<br />
en een opstelbaar deel waartussen zich een hydraulisch gestuurde stelinrichting<br />
bevindt. Door deze aan de hand <strong>van</strong> sensoren aan te sturen, kan de bovenbouw<br />
recht worden gehouden door de stabilisatorspanning te verhogen. BMW spreekt<br />
<strong>van</strong> een ’dynamic drive systeem’ en compenseert tot 0,3 g elke dwarshelling <strong>van</strong><br />
het voertuig (fig. 6). Vanaf 0,6 g wordt het rollen slechts gedeeltelijk onderdrukt<br />
om de bestuurder het contact met de auto niet te laten verliezen. Voor het<br />
systeem worden de ESP-sensoren gebruikt waar<strong>van</strong> de g-sensor het belangrijkste<br />
is. Uiteraard maakt men hier weer gebruik <strong>van</strong> de CAN-bus. De insteldruk<br />
variëert tussen de 5 en 180 bar hetgeen overeenkomt met een koppel <strong>van</strong> 800<br />
Nm. Dit betekent dat in een bocht de bovenbouw aan de buitenzijde omhoog<br />
wordt gedrukt en aan de binnenzijde naar beneden wordt getrokken. Door de<br />
voorstabilisator en achterstabilisator verschillend aan te sturen, kan ook het<br />
over- of onderstuur effect worden gekompenseerd.<br />
5 Ontkoppelbare stabilisatoren<br />
Onder terrein-omstandigheden (sport utility vehicles) verhinderen de stabilisatoren<br />
dat de wielen goed het terrein blijven volgen. In het ongunstige geval<br />
4
Figuur 6: Het dynamic-drive systeem <strong>van</strong> BMW. Een hydraulische stelmotor kan torsiespanning<br />
<strong>van</strong> de stabilisator instellen.<br />
komen de aangedreven wielen vrij <strong>van</strong> de grond. In zulke gevallen is het beter<br />
de stabilisator uit te schakelen. In- en uitschakelen gebeurt door de stabilisator<br />
te delen en de helften al dan niet met elkaar te verbinden. De Volkwagen<br />
Touareg bezit zo’n systeem. De stabilisator-actuator bestaat uit een hydraulisch<br />
te bekrachtigen klauwkoppeling, een fail-safe veer en een sensor (fig. 7). Het<br />
Figuur 7: Klauwkoppeling <strong>van</strong> de ontkoppelbare stabilisator in geopende toestand. Een vrije<br />
draaihoek <strong>van</strong> 34 graden wordt bereikt waardoor de asbeweging met 60 mm wordt vergroot.<br />
systeem bestaat verder uit een besturingscomputer, een hydraulische eenheid<br />
en een bedieningsknop. Het koppelen en ontkoppelen geschiedt hydraulisch.<br />
Hiervoor zijn een elektrisch aangedreven hydraulische pomp, een drukreservoir<br />
en schakelkleppen nodig (fig. 8). De bedrijfsdruk bedraagt 110 bar. Ontkoppeling<br />
geschiedt op commando <strong>van</strong> de bestuurder maar alleen wanneer de<br />
rijsnelheid lager is dan 40 km/h, de dwarsversnelling kleiner is dan 0,5 g terwijl<br />
de versnellingsbak in de lage gearing moet zijn geschakeld. Eerst wordt de<br />
5
stabilisator achter en vervolgens de stabilisator voor ontkoppeld. Dit gebeurt<br />
door de druk toe te laten in de kamers 1. Het systeem schakelt automatisch<br />
uit (komt weer in de gekoppelde toestand terug) wanneer de rijsnelheid boven<br />
de 50 km/h komt of wanneer de dwarsversnelling groter wordt dan 0,7 g. Het<br />
systeem wordt gebruikt voor staal- en luchtveren. De fail-safe veer koppelt de<br />
stabilisator in geval <strong>van</strong> een storing.<br />
Figuur 8: De hydraulische aansturing <strong>van</strong> de ontkoppelbare stabilisator<br />
6 Het Activa veersysteem<br />
Het Activa veersysteem <strong>van</strong> Citroën staat voor actieve stabilisatie. Het overhellen<br />
wordt voorkomen c.q. gecorrigeerd, omdat de stabilisatorstang voor en<br />
achter is uitgevoerd met een hydraulische cilinder. Deze hydraulische cilinder<br />
kan worden beschouwd als een verbindingsstang met variabele lengte tussen<br />
stabilisator en veerelement. De carrosserie kan zodoende t.o.v. het chassis worden<br />
verplaatst. Het Activa veersysteem is een uitbreiding <strong>van</strong> Citroën’s hydropneumatische<br />
veersysteem. De stabilisatiecilinders zijn kruislings geplaatst. Fig.<br />
9 geeft de opstelling <strong>van</strong> de onderdelen <strong>van</strong> beide assen weer. De mate <strong>van</strong><br />
overhellen hangt af <strong>van</strong> de zwaartepuntligging alsmede de rijsnelheid en de<br />
6
Figuur 9: Kruislinks gescheiden opstelling <strong>van</strong> de hydraulische stabilisatorcilinders <strong>van</strong> het Activa<br />
veersysteem. Boven: Stabilisatorstang (34) en de hydraulische cilinder (15) <strong>van</strong> de voorwielophanging.<br />
Onder: Stabilisatorstang (35) en hydraulische cilinder (16) bij de achterwielophanging.<br />
7
straal <strong>van</strong> de bocht. De gegevens <strong>van</strong> de rijsnelheids-sensor en de stuurhoeksensor<br />
geven de computer voldoende informatie om te reageren. In fig. 10 zijn<br />
3 situaties weergegeven. Tijdens het rechtuitrijden (A) is de hydraulische stabilisatorcilinder<br />
verbonden met een veerbol. Hierdoor heeft de stabilisator een<br />
door de veerbol bepaalde extra soepelheid gekregen. Door de verbinding <strong>van</strong><br />
de hydraulische cilinder met de veerbol te verbreken, wordt de stabilisatie stugger<br />
en wordt overhellen voorkomen (situatie B). In de voorbeeld situatie C is<br />
dit ten gevolge <strong>van</strong> de hoge bochtsnelheid onvoldoende en wordt er vloeistof<br />
in de hydraulische cilinder geperst waardoor de carrosserie recht blijft liggen.<br />
De stuurwielsensor geeft informatie omtrent het insturen <strong>van</strong> een bocht. On-<br />
Figuur 10: Het Activa veersysteem in de rijsituaties: rechtuit, in sturen en scherpe bocht.<br />
middellijk na de constatering (40 ms) wordt de veerbol afgesloten en wordt<br />
de stabilisatie 2x stugger. Wanneer de bocht enige tijd aanhoudt en de carrosserie<br />
meer dan 0,3 0 overhelt (5 mm verplaatsing <strong>van</strong> de voordraagarmen)<br />
dan wordt de hoogte gecorrigeerd door olie naar de stabilisator-cilinders te<br />
laten stromen c.q. te laten afvloeien. Fig. 11 laat de invloed zien <strong>van</strong> het active<br />
veersysteem op de hellingshoek <strong>van</strong> de auto in een bocht. Het systeem,<br />
zie fig. 12, bestaat uit een regelunit (20) met stabilisatieveerbol en elektroklep<br />
(21). Deze klep (21) wordt door de computer aangestuurd. Een mechanische<br />
rolregelaar (14), zie ook fig. 13, kan vloeistof onder druk aanvoeren of via een<br />
retourleiding vloeistof afvoeren. Dit gebeurt naar beide kamers. Verder is er<br />
een extra voorraadbol (9) gemonteerd. De hydraulische vloeistof onder druk<br />
wordt via een veiligheidsventiel aangevoerd. De opstelling <strong>van</strong> de onderdelen<br />
volgens fig. 12 geeft de situatie ’soepele stabilisatie’ weer. De rolregelaar sluit<br />
de verbindingen af en beide stabilisatie-cilinders zijn via een stugheidsregelaar<br />
(2) verbonden met de veerbol. Om het rollen tegen te gaan wordt de lengte<br />
8
Figuur 11: Het Activa-veersysteem houdt tot ongeveer 0,6 g de auto nagenoeg recht.<br />
Figuur 12: Het Activa systeem in de stand ’soepele stabilisatie’ (rechtuit rijden).<br />
9
<strong>van</strong> de stabilisatiecilinders aangepast. Een rolregelaar heeft als functie om olie<br />
toe te voeren of af te voeren en zodoende de lengte te regelen. De rolregelaar<br />
is verbonden via een stangenstelsel met de draagarmen. In een bocht zal altijd<br />
één draagarm naar boven en de andere naar beneden bewegen. Deze bewegingsverandering<br />
wordt gebruikt voor de bediening <strong>van</strong> de rolregelaar. Fig. 13<br />
geeft de opstelling. We zien dat een balansarm de plunjer <strong>van</strong> de rolregelaar<br />
doet bewegen. In een bocht naar links (rol naar rechts) ontstaat de situatie<br />
Figuur 13: De balansarm <strong>van</strong> de rolregelaar (14) verschuift naar links of rechts afhankelijk <strong>van</strong><br />
de stand <strong>van</strong> de draagarmen.<br />
volgens fig. 14. Om de carrosserie weer horizontaal te krijgen moet vloeistof<br />
in de cilinder worden geperst, zodat de stabilisatorarm langer wordt. Door het<br />
langer worden <strong>van</strong> de arm komt het wiel dichter bij de carrosserie en wordt<br />
D1 kleiner. De carrosserie komt dan horizontaler te liggen. Aan de achterzijde<br />
is er eenzelfde situatie ontstaan (fig. 14 onder). Alleen de stabilisatorcilinder<br />
bevindt zich nu aan de rechterzijde en ’onder’ de stabilisatorstang. Vloeistof onder<br />
druk zal nu ook de arm verlengen waardoor de carrosserie wordt opgetild<br />
en vlakker komt te liggen. Het overhellen in de bocht wordt derhalve tot een<br />
minimum gereduceerd. In een rol naar links ontstaat er een soortgelijke doch<br />
tegengestelde situatie. Men laat dan de olie uit de cilinders wegstromen waardoor<br />
de armen verkorten. De carrosserie blijft dan zo vlak mogelijk liggen. Hydraulisch<br />
kunnen we de situatie in de rol naar rechts (= bocht naar links)<br />
als fig. 15 (boven) tekenen. De rolregelaar (14) laat vloeistof onder druk toe<br />
onder beide plunjers. De stabilisatorarmen verlengen en de rol wordt tegengegaan.<br />
Verder zien we dat de elektroklep (21) de hydraulische vloeistof onder<br />
de plunjer <strong>van</strong> de stugheidsregelaar heeft toegelaten waardoor deze omhoog<br />
is geschoven en de stabilisatieveerbol is afgeschakeld. De stabilisator heeft de<br />
situatie ’stug’ aangenomen. Fig. 15 (onder) geeft de hydraulische situatie weer<br />
in de stand bocht naar rechts (= rol naar links). De rolregelaar (14) heeft de<br />
retour geopend. Vloeistof onder druk komt boven de plunjer uit waardoor de<br />
stabilisatorarmen zich verkorten.<br />
10
Figuur 14: Carroserie helt naar rechts over (linker bocht). Boven: Stabilisator opstelling aan<br />
de voorzijde; het wiel wordt omhoog gedrukt. Onder: Stabilisator achter; de karrosserie wordt<br />
omhooggedrukt.<br />
7 Langsstabiliteit <strong>van</strong> een voertuig<br />
Behalve dwarsstabiliteit is er ook nog langsstabiliteit. Algemeen: de weerstand<br />
<strong>van</strong> het voertuig tegen (ongewenste) bewegingen staat bekend als stabiliteit.<br />
De dwarsstabiliteit is reeds behandeld. Blijft de langsstabiliteit over. Een duikbeweging<br />
treedt op bij het remmen, versnellen en oneffenheden in het wegdek<br />
en beïnvloedt de asbelasting en de koplampafstelling. Deze beweging wordt<br />
bovendien als onaangenaam ervaren. De weerstand die het voertuig biedt tegen<br />
deze bewegingsverandering noemt men de langsstabiliteit <strong>van</strong> het voertuig. Bij<br />
de bepaling <strong>van</strong> het duikmoment, de oorzaak <strong>van</strong> de duikbeweging, moet het<br />
duikcentrum of Nickcentrum <strong>van</strong> het voertuig worden bepaald.<br />
7.1 Het duikmoment<br />
Bij de theorie <strong>van</strong> het remmen hebben we (gemakshalve) aangenomen dat<br />
het duikmoment veroorzaakt werd door de remkracht (Frem = m x a) vermenigvuldigt<br />
met de afstand zwaartepunt tot het wegdek. Nu is dit in de meeste<br />
gevallen niet geheel correct. Niet de afstand tot het wegdek is verantwoordelijk<br />
maar de afstand tot het duikcentrum. En hiervoor is de wielophanging bepalend.<br />
We nemen fig. 16 als voorbeeld. De voorwielophanging bestaat hier uit<br />
twee dwarsarmen die zodanig geplaatst zijn dat het verlengde <strong>van</strong> de armen<br />
elkaar snijden in het punt Ov. Dit punt noemt men de duikpool <strong>van</strong> de voorwiel-<br />
11
Figuur 15: Boven: De rolregelaar laat vloeistof onder druk onder de plunjer toe waardoor de armen<br />
verlengen. De veerbol is afgeschakeld. Onder: De rolregelaar laat vloeistof onder de plunjer<br />
retour stromen terwijl de druk boven de plunjer aanwezig blijft. De armen worden korter. De<br />
veerbol is afgeschakeld.<br />
12
geleiding. De achterwielophanging bestaat -in dit voorbeeld- uit langsarmen.<br />
Het scharnierpunt Oa is de duikpool <strong>van</strong> de achterwielophanging. Wanneer we<br />
nu lijnen trekken <strong>van</strong>uit het raakpunt wiel-wegdek door Ov en Oa, dan snijden<br />
deze lijnen elkaar in punt D. Punt D staat bekend onder het duikcentrum of<br />
Nickcentrum. Het duikcentrum D ligt op een afstand hd <strong>van</strong> het wegdek. Wanneer<br />
het zwaartepunt <strong>van</strong> de bovenbouw op een afstand hz <strong>van</strong> het wegdek<br />
ligt, dan kan het duikmoment worden berekend. Er geldt:<br />
Duikmoment = Frem x (hz-hd)<br />
Figuur 16: Het duikmoment <strong>van</strong> de bovenbouw wordt bepaald door Fr ( = bijv. remkracht) x<br />
(hz-hd)<br />
8 Vragen en opgaven<br />
1. Wat verstaan we onder de rolas <strong>van</strong> de auto?<br />
2. Wat gebeurt er met het rolmoment <strong>van</strong> de auto wanneer we de snelheid<br />
in de bocht vergroten?<br />
3. Tussen welke punten (lijnen) ligt nu precies de rolarm?<br />
4. Welke systemen c.q. onderdelen kunnen het rolgedrag <strong>van</strong> een auto<br />
beperken?<br />
5. Een stabilisatorstang wordt in de bocht op torsie belast. Leg dit uit.<br />
6. Wat verstaat men onder een actieve stabilisator?<br />
7. Op welke wijze werkt de ’dynamic drive’ <strong>van</strong> BMW?<br />
8. Welke ESP-sensoren worden door BMW voor het dynamic drive systeem<br />
gebruikt?<br />
9. Om welke reden kunnen de voor en achter stabilisator verschillend worden<br />
aangestuurd?<br />
10. Bij welke snelheid zal in een bocht met een straal <strong>van</strong> 100 m 0,6 g wordt<br />
bereikt? (a = v 2 / rc )<br />
11. Wat wil men bereiken met een ontkoppelbare stabilisator?<br />
12. Zal wanneer de bestuurder de ontkoppeling activeert het systeem ook<br />
altijd ontkoppelen?<br />
13. Wat zijn de genoemde voorwaarden?<br />
14. Wat is de functie <strong>van</strong> de zware veer in het stabilisator-schakelhuis?<br />
13
15. Geef vier factoren weer die de mate <strong>van</strong> overhellen in de bocht bepalen.<br />
16. Op welke wijze zorgen de stabilisatoren <strong>van</strong> het Activa systeem dat het<br />
overhellen in een bocht wordt voorkomen?<br />
17. Behalve dat de lengte <strong>van</strong> de stabilisatorarmen bij het Activa systeem<br />
kan worden aangepast kan men ook de soepelheid <strong>van</strong> de stabilisator<br />
beïnvloeden. Op welke wijze gebeurt dit?<br />
18. Tot welke dwarsversnelling houdt het Activa systeem de auto nagenoeg<br />
recht?<br />
19. Wanneer we in fig. 12 olie onder druk toelaten naar beide kamers (de<br />
kleine en de grote) zal de plunjer omhoog bewegen. Verklaar dit.<br />
20. Gebruik fig. 12 en fig. 15 om de stand <strong>van</strong> de kleppen en plunjers uit te<br />
leggen tijdens het rechtuit rijden, een rol naar links en een rol naar rechts.<br />
21. Waarom is het niet helemaal correct om het duikmoment tijdens het remmen<br />
te berekenen uit de remkracht vermenigvuldigt met de afstand <strong>van</strong><br />
het zwaartepunt tot het wegdek?<br />
14