Verslag Regeltechniek 2
Verslag Regeltechniek 2
Verslag Regeltechniek 2

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Invoer in Matlab wordt dan:<br />
noemer=[1 (1/(a*taud)+1/taup1+1/taup2)<br />
(1/(a*taud*taup1)+1/(a*taud*taup2)+1/(taup1*taup2)) (1/(a*taud*taup1*taup2)) 0];<br />
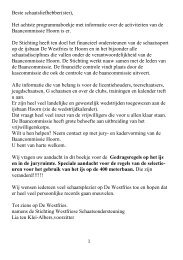
Het verschil met het PI-geregeld tweede orde system t.o.v. een PID-geregeld tweede orde<br />
systeem is dat er in de poolbaan een extra pool en een extra punt bijkomen. Onderstaande<br />
plot maakt het een en ander duidelijk.<br />
Het linker punt is:<br />
Het 2e punt is:<br />
Het 3e punt is:<br />
Het 4e punt is:<br />
1<br />
d<br />
1<br />
p<br />
2<br />
1<br />
<br />
p1<br />
1<br />
i<br />
1<br />
d<br />
1<br />
p<br />
2<br />
Figuur: PID tweede orde systeem poolbaan<br />
1 oftewel 2.22<br />
0.45<br />
1 oftewel 2<br />
0.5<br />
oftewel<br />
oftewel<br />
1 0.5<br />
2<br />
1 0.4<br />
2.5<br />
1<br />
<br />
<strong>Verslag</strong> <strong>Regeltechniek</strong> 2 pagina 38/60<br />
p1<br />
1<br />
i