Verslag Regeltechniek 2
Verslag Regeltechniek 2
Verslag Regeltechniek 2

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
7 PID-geregeld tweede orde systeem<br />
7.1 Inleiding<br />
De volgende regelaar die we zullen behandelen betreft een proportioneel integrerend<br />
differentiërend (PID) tweede orde systeem. Dit PID-systeem zullen we beoordelen met<br />
behulp van de 4 regelparameters, te weten r K , i , d en a (de tamheidsfactor). Aan de<br />
procesparameters kunnen we niets veranderen, dit zijn p1,<br />
p2<br />
en de K p .<br />
Ook bij dit systeem zullen we bekijken wat de invloed is van deze regelparameters op de:<br />
Snelheid<br />
Nauwkeurigheid<br />
Relatieve stabiliteit<br />
7.2 Blokschema<br />
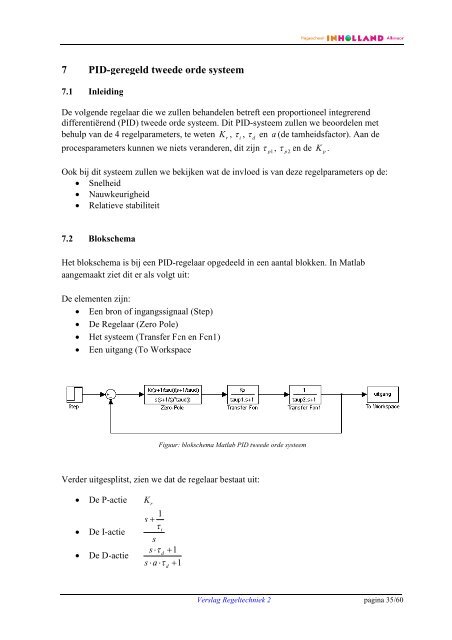
Het blokschema is bij een PID-regelaar opgedeeld in een aantal blokken. In Matlab<br />
aangemaakt ziet dit er als volgt uit:<br />
De elementen zijn:<br />
Een bron of ingangssignaal (Step)<br />
De Regelaar (Zero Pole)<br />
Het systeem (Transfer Fcn en Fcn1)<br />
Een uitgang (To Workspace<br />
Figuur: blokschema Matlab PID tweede orde systeem<br />
Verder uitgesplitst, zien we dat de regelaar bestaat uit:<br />
De P-actie r K<br />
De I-actie<br />
1<br />
s <br />
i<br />
s<br />
De D-actie<br />
s d 1<br />
s a 1<br />
d<br />
<strong>Verslag</strong> <strong>Regeltechniek</strong> 2 pagina 35/60