downloaden
downloaden
downloaden

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Aangepast door Thomas Cools en Evi Meeus
Abstract ..............................................................................................2<br />
Inleiding ..............................................................................................3<br />
Theoretisch gedeelte...........................................................................4<br />
1. Sensoren ..................................................................................................................... 4<br />
1.1. Proprioreceptoren ......................................................................................................................4<br />
1.1.1. Versnellingssensoren .........................................................................................................4<br />
1.1.2. Snelheidssensoren..............................................................................................................4<br />
1.1.3. Sensoren voor de hoekverdraaiing.....................................................................................4<br />
1.2. Exteroreceptoren........................................................................................................................5<br />
2. Centrale verwerkingseenheid................................................................................... 7<br />
3. Navigatie..................................................................................................................... 9<br />
3.1. Methodes met microswitches ....................................................................................................9<br />
3.1.1. Methode 1 ..........................................................................................................................9<br />
3.1.2. Methode 2 ........................................................................................................................10<br />
3.2. Methodes met infrarood-sensoren ...........................................................................................10<br />
3.2.1. Methode 1 ........................................................................................................................10<br />
3.2.2. Methode 2 ........................................................................................................................11<br />
4. Toepassingen microrobot ....................................................................................... 12<br />
4.1. Entertainment...........................................................................................................................12<br />
4.2. Industrie ...................................................................................................................................12<br />
4.3. Reddingswerken ......................................................................................................................13<br />
4.4. Geneeskunde............................................................................................................................14<br />
4.5. Beveiliging...............................................................................................................................15<br />
Praktisch gedeelte ...........................................................................16<br />
1. Onderzoek................................................................................................................ 16<br />
2. Testen........................................................................................................................ 18<br />
Besluit................................................................................................19<br />
Bijlagen .............................................................................................20<br />
1. Bronnen van figuren ............................................................................................... 20<br />
2. Bronnen.................................................................................................................... 21<br />
1
Abstract<br />
Thomas Cools<br />
Ons wetenschappelijk project handelt over de microrobot. Het doel is om zelf een microrobot te maken en<br />
deze door een doolhof te laten rijden met behulp van sensoren en zelfgeschreven programma’s.<br />
In deze paper zullen we enkele belangrijke aspecten bespreken, die te maken hebben met de<br />
voortbeweging van een microrobot. Ook zullen we het hebben over toepassingen waarin men microrobots<br />
gebruikt.<br />
2
Inleiding<br />
Johan Vennekens<br />
Een microrobot is een kleine machine die in staat is met behulp van voorgeprogrammeerde software een<br />
correcte handeling uit te voeren.<br />
Microrobots worden vandaag de dag voor diverse toepassingen gebruikt. Mogelijke uitvoeringen van<br />
deze toch wel 'futuristische' machines zijn het controleren van pijpleidingen, entertainment en nog vele<br />
andere. In deze paper gaan we niet enkel dieper in op de toepassingen, maar bekijken we ook wat we<br />
nodig hebben om een microrobot door een doolhof te laten navigeren. Hierbij maken we handig gebruik<br />
van sensoren en navigatietechnieken.<br />
Sensoren komen voor in verschillende vormen. Het ontwerpen van een robot begint dus met het<br />
selecteren van de juiste sensoren, aan de hand van de beoogde toepassingen. Deze worden verbonden met<br />
de centrale verwerkingseenheid, het 'brein' van de computer. We bespreken ook de vier verschillende<br />
mogelijkheden van navigatie die we overwogen hebben.<br />
Ons project wordt geïllustreerd met een praktische uitvoering. Dit zou het maken van een eigen<br />
microrobot inhouden. Het uiteindelijke doel is het zelfgemaakte robotje eigenhandig door een doolhof te<br />
laten rijden.<br />
Graag willen we onze begeleider, Toon Goedemé, bedanken voor zijn hulp en ondersteuning bij de<br />
uitvoering van ons project.<br />
3
Theoretisch gedeelte<br />
1. Sensoren<br />
Jona Gladines<br />
Robots maken bijna altijd gebruik van verschillende soorten sensoren. Dit om bepaalde toestanden te<br />
kunnen analyseren en er een gepaste actie op toe te passen. Sensoren kunnen heel ruim gezien in twee<br />
categorieën opgedeeld worden. Ten eerste zijn er de proprioreceptoren ofwel interne sensoren, die zorgen<br />
voor informatie over de interne toestand van de robot zelf. Als tweede soort zijn er de exteroreceptoren,<br />
externe sensoren, die de omgeving aan de robot duidelijk te maken. De gegevens van beide soorten<br />
sensoren worden in een centrale computereenheid verwerkt tot acties voor de robot.<br />
1.1. Proprioreceptoren<br />
In het woord proprioreceptoren hoort men het franse woord propriété, dit betekent letterlijk: eigendom,<br />
eigenschap. Dit wil dus zeggen dat deze sensoren de eigenschappen van de robot aangeven. Een robot<br />
bevat veel bewegende onderdelen en van elk van die onderdelen wil men vaak weten in welke toestand ze<br />
zich bevinden. Bijvoorbeeld de hoek waarover een wiel verdraaid wordt of hoe snel de robot gaat. De<br />
meest gebruikte interne sensoren zijn: versnellingssensoren, snelheidssensoren en sensoren die de<br />
hoekverdraaiing meten.<br />
1.1.1. Versnellingssensoren<br />
Zoals de naam reeds aangeeft, worden deze sensoren gebruikt om een versnelling van een bepaalde massa<br />
aan te geven. Bijvoorbeeld een botsing gaat gepaard met een plotse negatieve versnelling. Wanneer een<br />
robot ergens af valt, ondervindt hij ook een bepaalde versnelling. De gegevens van deze sensoren kunnen<br />
gebruikt worden om, bijvoorbeeld in het geval dat de robot ergens af valt, bepaalde componenten te<br />
beschermen.<br />
1.1.2. Snelheidssensoren<br />
Deze sensoren worden ondermeer gebruikt om de snelheid van de robot zelf aan te geven, maar ook de<br />
snelheid van de verschillende onderdelen, zoals die van de wielen. Deze gegevens kunnen ze dan<br />
vergelijken. Nasa’s marsrover Spirit heeft zichzelf in april vorig jaar vast gereden in een zandbank. Ze<br />
merkten dit omdat de robot bijzonder traag vooruit reed in vergelijking met de snelheid van de wielen, de<br />
wielen slipten door.<br />
1.1.3. Sensoren voor de hoekverdraaiing<br />
Acties van een robot moeten vaak gecoördineerd zijn en zonder risico verlopen. De makkelijkste manier<br />
hiervoor is een eenheidsstelsel gebruiken voor alle acties. Versnelling en snelheid hebben we reeds<br />
besproken, maar wat als de robot naar een specifieke richting moet draaien of wanneer een gevoelig<br />
instrument tot op enkele millimeters van het te onderzoeken object moet worden gebracht? Robots<br />
gebruiken voor enkele onderdelen sensoren die meten welke hoek er wordt gemaakt tegenover de<br />
nulpositie. Een van de meest gebruikte sensoren hiervoor is de potentiometer. De positie wordt<br />
aangegeven door het verschil in weerstand tussen de linker- en de rechterhelft.<br />
4
1.2. Exteroreceptoren<br />
Indien een robot zijn omgeving niet kent, weet hij ook niet welke kant hij op moet. Zonder enige manier<br />
van controle zou een robot zo tegen een muur aanrijden. Het is dus belangrijk te weten waar obstakels<br />
zich bevinden of waar de interessante plekken zijn. Het zou handig zijn als de robot zou kunnen voelen.<br />
De makkelijkste manier om een robot te laten voelen is met een microswitch, dit is een kleine schakelaar.<br />
Door over deze schakelaar spanning te zetten, kan hij als sensor gebruikt worden. Wanneer de robot iets<br />
raakt, wordt de schakelaar ingedrukt en verschijnt er een digitale 1 aan de ingang van de centrale<br />
verwerkingseenheid, anders blijft de ingang op 0 staan. Een eenvoudig digitaal signaal vertelt de robot<br />
dus of hij tegen een muur staat of niet, bijgevolg weet de robot wat te doen. Bij dit soort sensoren zijn er<br />
wel enkele beperkingen en problemen. Allereerst is het toepassingsgebied zeer beperkt. Er kan enkel<br />
bepaald worden of de robot zich ergens tegenaan bevindt of niet, er wordt geen exacte afstand gemeten.<br />
De robot moet het obstakel ook fysiek aanraken, wat het risico op blokkering verhoogt.<br />
Zou het niet beter zijn wanneer een robot effectief kon zien? Ogen voor robots zijn er in verschillende<br />
vormen en maten. Allereerst is er de videocamera. Deze geeft een werkelijk beeld van de omgeving,<br />
waardoor er dus exact bepaald kan worden wat de robot moet doen. Een nadeel van deze techniek is dat<br />
dit veel programmeerwerk met zich meebrengt en dat elk beeld moet verwerkt worden. Dit zorgt voor een<br />
grote gegevensstroom. Naast zichtbaar licht bestaan er nog een heleboel andere soorten stralingen. Wij<br />
kunnen ze niet zien, maar we zijn wel in staat om toestellen te maken die dat wel kunnen. Zo bestaan er<br />
infrarood-gevoelige sensoren. In combinatie met een infrarood-bron kan men makkelijk een sensor maken<br />
die de afstand bepaalt tussen de sensor en een obstakel.<br />
Figuur 1: Afstandsbepaling via weerkaatsing van infrarood-stralen.<br />
De werking van deze sensoren berust op weerkaatsing van infrarode lichtstralen. De weerkaatste straal<br />
wordt opgevangen door de infrarood-sensor, waardoor die een spanning doorlaat. De doorgelaten<br />
spanning is afhankelijk van de intensiteit van het invallend licht. Meer licht is meer spanning, dus<br />
wanneer het object dichtbij is, wordt meer licht weerkaatst en bijgevolg meer spanning doorgelaten. Deze<br />
sensoren hebben wel enig probleem. De intensiteit van de weerkaatste straal is afhankelijk van het<br />
materiaal waaruit het object is opgebouwd. Hierdoor kan de sensor de afstand verkeerd inschatten,<br />
wanneer deze voor een ander materiaal komt te staan.<br />
En mogelijke oplossing voor dit probleem is driehoeksmeetkunde. Sensoren die hiermee werken,<br />
gebruiken ook een infrarood-lichtbron, maar in plaats van een infrarood-sensor, zijn ze uitgerust met een<br />
infrarood-gevoelige ccd. Hiermee kan men bepalen onder welke hoek een straal invalt. Er zijn twee<br />
mogelijkheden wanneer er een straal uitgezonden wordt:<br />
• de straal botst nergens tegen en blijft gewoon doorgaan. De ccd zal dus niets opvangen.<br />
• de straal botst tegen een object en vormt een driehoek met de bron, het reflectiepunt en de<br />
ccd.<br />
5
De hoeken in deze driehoek zijn afhankelijk van de afstand tot het object. Dit type sensoren is theoretisch<br />
onafhankelijk van omgevingsfactoren. Praktisch is dit niet zo, maar het is vele malen beter dan bij de<br />
eerste soort sensoren 1 , 2 .<br />
Figuur 2: Afstandsbepaling via driehoeksmeetkunde.<br />
Plaatsbepaling is het hoofddoel van dit project met het oog op autonome navigatie. De voor- en nadelen<br />
van de verschillende sensoren werden met elkaar vergeleken. De infrarood-sensoren kwamen als beste uit<br />
deze vergelijking. Een robot werkt niet alleen met sensoren, de gegevens van die sensoren dienen ook<br />
verwerkt te worden.<br />
1 Internet, 5-10-2009, (http://www.site.uottawa.ca/~petriu/CEG4392-IntroRobotics-Sensors.pdf).<br />
2 Internet, 5-10-2009, (http://www.sensorland.com/).<br />
6
2. Centrale verwerkingseenheid<br />
Jona Gladines<br />
Van een intelligente robot wordt verwacht dat hij zichzelf door een reeks van nauwe gangen kan<br />
manoeuvreren. Daarvoor beschikt hij over vele sensoren, die op hun beurt een hele boel gegevens<br />
produceren. Al deze gegevens dienen verwerkt te worden om tot een gepaste actie te komen. Daarom<br />
bevat een intelligente robot ook steeds een centrale verwerkingseenheid, een soort computer die de<br />
gegevens verwerkt.<br />
Er zijn verschillende soorten kleine computers die geschikt zijn voor dit soort toepassingen. Ten eerste<br />
heb je de microcontroller, hierbij zijn alle componenten ( CPU, ROM- en RAM-geheugen) geïntegreerd<br />
in één chip. De microcontroller is ook zeer flexibel, hij is meerdere malen programmeerbaar. Het is een<br />
populaire component, die dan ook door verschillende fabrikanten gemaakt wordt. Een tweede soort<br />
computer, die geschikt is, is een FPGA (field programmable gate array). Een FPGA bevat verschillende<br />
logische schakelingen als AND, OR, XOR,.. Ook deze component is heel flexibel en maakt gebruik van<br />
softwarematige programmatie om te kunnen functioneren. Een FPGA is echter veel trager dan een<br />
microcontroller.<br />
Figuur 3: Programma waarop de robot werkt.<br />
Wij opteerden voor een microcontroller, genaamd “Arduino”. 3 Dit platform is programmeerbaar via een<br />
USB-poort en de programmeertaal is een variant van “C”. Het programma om de microcontroller te<br />
programmeren is tevens een open-source programma. Een extra voordeel van “Arduino” is dat deze over<br />
enkele analoge ingangspoorten beschikt, waardoor we zulke sensoren kunnen gebruiken zonder extra<br />
hardware toe te voegen.<br />
Afstandssensoren van “SHARP” 4 leken ons bijzonder geschikt, omdat deze fysiek contact met de muur<br />
van het labyrint overbodig maken. De sensoren, die we gebruiken, hebben een hyperbolisch verband<br />
3 Internet, 25-10-2009, (http://www.arduino.cc/).<br />
4 Internet, 5-10-2009, (http://www.acroname.com/robotics/info/articles/sharp/sharp.html).<br />
7
tussen de uitgegeven spanning en de afstand tot het object. Wanneer het object zich nabij bevindt, is de<br />
spanning hoog, is het object verder verwijderd, dan geeft dit een lage spanning. De microcontroller meet<br />
deze analoge spanning op gegeven tijdstippen en zet die om in een getal van 0 tot 1023 (10 bit). Ons<br />
programma is zo opgebouwd dat de microcontroller deze waarde gaat vergelijken met een gegeven<br />
waarde. Als die waarde overschreden wordt, betekent dit dat de robot zich te dicht bij de muur bevindt. Er<br />
moet dus een actie uitgevoerd worden, namelijk een bocht nemen. We proberen de robot door het labyrint<br />
te laten navigeren met drie sensoren: één links, één rechts en één voorop.<br />
Door de robot rechtdoor te laten rijden, kunnen we afwijkingen controleren met de linkse en rechtse<br />
sensor. Wanneer de robot rijdt, worden alle sensoren afwisselend gecontroleerd. Wanneer een van de<br />
sensoren een signaal geeft, wordt er een actie ondernomen. Concreet bestaat het programma slechts uit<br />
twee delen: een oneindige lus waarin de sensoren gecontroleerd worden en een tweede functie waarin er<br />
een bocht genomen wordt. De uitvoering van een bocht gebeurt door de wielen over een bepaalde tijd in<br />
tegenovergestelde richting te laten draaien. We kunnen een grote of kleine bocht nemen door de tijd,<br />
waarover de robot draait, aan te passen.<br />
Figuur 4: Controle voor een rechtse of linkse bocht.<br />
Een robot heeft dus ‘zintuigen’ en ‘hersenen’, die moeten goed samenwerken om de robot foutloos te<br />
doen functioneren.<br />
De robot moet door een doolhof rijden, maar er zijn verschillende manieren om dit te doen. In ‘navigatie’<br />
zullen de verschillende manieren besproken worden.<br />
8
3. Navigatie<br />
Johan Vennekens<br />
In dit deel wordt er besproken wat de verschillende mogelijkheden zijn om door het voorgestelde doolhof<br />
te bewegen (figuur 5) en voor welke mogelijkheid wij opteerden. We gaan hier niet in op de juiste<br />
afstelling voor draaiingen en afstanden. We bespreken louter de verschillende methodes.<br />
Bij het bedenken van de verschillende methodes moet rekening gehouden worden met de mogelijkheden<br />
van de robot en de gebruikte sensoren.<br />
De robot heeft enkel de mogelijkheid om:<br />
• vooruit te rijden,<br />
• achteruit te rijden,<br />
• met één rupsband vooruit en met de ander achteruit te rijden.<br />
De gebruikte sensoren zijn microswitches en infrarood sensoren (zie onderdeel sensoren).<br />
3.1. Methodes met microswitches<br />
Microswitches zijn gewone schakelaars die bij indrukking een logische één doorsturen en bij uitgedrukte<br />
toestand een nul. We hebben twee navigatiemethodes bedacht met microswitches. Bij de eerst methode<br />
wordt gebruik gemaakt van twee microswitches, bij de tweede methode van drie microswitches.<br />
3.1.1. Methode 1<br />
Figuur 5: Plattegrond van het doolhof<br />
We plaatsten één microswitch (S1) vooraan de robot en één rechts vooraan (S2) (figuur 6). We zetten de<br />
robot op positie 1 van het doolhof onder een hoek van ± 45° en laten zo de robot steeds een cyclisch<br />
traject uitvoeren door een klein stukje vooruit te rijden en dan enkele graden te laten draaien naar rechts.<br />
Als sensor S2 ingedrukt wordt, weten we dat het robotje de rechterkant bereikt heeft en laten we deze<br />
draaien totdat de robot een hoek maakt met de muur van ±45°. Als sensor S1 ingedrukt wordt, is er<br />
vooraan een muur bereikt en kunnen we de robot een draaiing laten uitvoeren van 90° naar links. De<br />
robot zal het hele doolhof lang volgens een cyclische baan de rechtermuur volgen (figuur 7).<br />
9
Figuur 6: Eén microswitch(S1) vooraan de<br />
robot en één rechts vooraan (S2)<br />
3.1.2. Methode 2<br />
We plaatsen één microswitch vooraan (S1) en twee rechts, de achterste (S3) van de twee sensoren waait<br />
breder uit dan de voorste (S2) (figuur 8). We beginnen in het doolhof ook op plaats (S1), maar nu plaatsen<br />
we de robot zo dat sensor (S3) ingedrukt is en sensor (S2) niet. We laten dan de robot rechtdoor rijden,<br />
maar nu wordt hij zo geplaatst dat sensor (S3) ingedrukt blijft en sensor (S2) juist niet. Als sensor (S1)<br />
ingedrukt wordt, weten we dat de muur bereikt is en kunnen we de robot een draaiing laten uitvoeren over<br />
90°. De robot zal dus het hele doolhof lang de rechtermuur blijven volgen.<br />
Alhoewel methode 1 minder microswitches nodig heeft dan methode 2, prefereerden we methode 2, omdat<br />
men hierbij minder zal moeten bijsturen. Dit geeft tot gevolg dat de microrobot zich sneller zal<br />
voortbewegen.<br />
3.2. Methodes met infrarood-sensoren<br />
We hebben twee methodes bedacht voor navigatie met behulp van infrarood-sensoren. De configuratie zal<br />
in beide gevallen gelijkend zijn, enkel de manier waarop we deze configuratie gebruiken is verschillend.<br />
3.2.1. Methode 1<br />
Positie 1<br />
Figuur 7: Cyclische baan.<br />
Figuur 8: De achterste (S3) van de twee sensoren waait breder uit dan de voorste (S2).<br />
We brengen één sensor (S1) vooraan aan, één links (S2) en één rechts (S3) (figuur 9). We plaatsen de<br />
robot in het begin van het doolhof. De plaats op zich is niet van belang. Als sensor (S2) of (S3) een<br />
waarde teruggeeft hoger dan een bepaalde waarde, weten we dat de robot langs die kant te dicht tegen de<br />
muur staat en kunnen we de robot laten wegdraaien van de muur. Als sensor (S1) een waarde teruggeeft<br />
hoger dan een ingestelde waarde, betekent dit dat de robot zich te dicht bij de muur bevindt en kunnen we<br />
deze laten draaien. Om de richting te bepalen waarin hij moet draaien, gaan we kijken naar sensor (S2) en<br />
(S3). De sensor met de grootste waarde bevindt zich dus het dichtst bij een muur. We moeten bijgevolg<br />
naar de andere kant draaien. De robot zal dus heel de tijd in het midden van het doolhof rijden.<br />
10
3.2.2. Methode 2<br />
Figuur 9: Eén sensor (S1) vooraan, één links (S2) en één rechts (S3).<br />
Bij deze methode wordt dezelfde sensoropstelling gebruikt. Elke keer als de robot te dicht bij de linker- of<br />
rechtermuur komt, gaan we hem een kleine wending naar rechts, respectievelijk naar links laten uitvoeren<br />
en daarna verder laten rijden. Als het robotje vooraan te dicht tegen de muur komt, laten we het een<br />
draaiing van 90° uitvoeren. De robot zal tussen twee grenswaarden in het midden blijven rijden.<br />
We verkiezen ook hier methode 2 boven methode 1, omdat methode 2 sneller is. We moeten minder<br />
bijsturen, wat er dus voor zorgt dat de robot minder stil moet staan.<br />
Alhoewel dat microswitches goedkoper zijn, kozen we voor infrarood-sensoren, omdat deze geen contact<br />
met de muur maken. Hierdoor kan de robot nergens aan blijven haken of nergens tegen stoten, wat de<br />
robot kan beschadigen of uit balans brengen.<br />
11
4. Toepassingen microrobot<br />
Evi Meeus en Thomas Cools<br />
Het woord robot komt van het Tsjechische “robota”, wat “dwangarbeid” betekent. Robots zijn in de<br />
meeste gevallen machines die in fabrieken routinewerken uitvoeren, maar je vindt ze ook terug in andere<br />
toepassingen. Wij zullen ons vooral richten op toepassingen van de microrobot.<br />
In 1950 bereikte de techniek een niveau waarop het mogelijk was om robots te creëren. Deze robots<br />
voerden taken uit, die door de ontwerper waren voorgeprogrammeerd. Op die manier voerde de robot<br />
steeds dezelfde processen na elkaar uit. Later streefde men naar een manier waarop deze machines zelf<br />
iets konden vaststellen en reageren op een bepaald signaal. Hiervoor werden sensoren ontwikkeld, die<br />
bepaalde fysische eigenschappen konden vaststellen en doorgeven aan het “brein” van de robot 5 .<br />
Wanneer we spreken over een microrobot, dan bedoelen we een robot die zeer klein is en toch in staat is<br />
vele verschillende en ingewikkelde opdrachten uit te voeren. Microrobots komen voor in allerlei<br />
toepassingen, van de entertainment- tot de industriële wereld.<br />
4.1. Entertainment<br />
In de entertainmentwereld komen deze robots van het kleinste formaat voor in toepassingen zoals<br />
robotvoetbal, vliegende robots, …<br />
Wetenschappers zijn er in geslaagd om robots tegen elkaar een spelletje voetbal te laten spelen. Tijdens<br />
het spel ‘denken’ de robots zelf na over hun volgende pas, met behulp van sensoren en een intern<br />
rekenpaneel.<br />
Op 26 november 2003 werd in Tokio ‘s werelds kleinste, vliegende microrobot onthuld. Deze was in staat<br />
evenwichtig te vliegen met een ultrasonische motor, dankzij een stabiliserend mechanisme. De<br />
afmetingen, 70 mm hoog en 130 mm breed, zijn haast ongeloofwaardig 6 .<br />
4.2. Industrie<br />
Figuur 10: ‘s werelds kleinste, vliegende robot.<br />
Microrobots in de industrie worden vooral gebruikt om controles uit te voeren op plaatsen waar weinig of<br />
geen plaats is om vrij te bewegen. Denk dan bijvoorbeeld aan nauwe doorgangen zoals smalle buizen van<br />
de waterleiding.<br />
Pijpleidingen zijn onderhevig aan corrosie. Deze wordt veroorzaakt door het fluïdum in de pijp en door de<br />
omgevingsfactoren langs de buitenzijde van de pijp. Corrosie kan leiden tot scheuren in de leidingwand,<br />
wat ernstige gevolgen kan hebben voor het milieu, indien het te transporteren fluïdum schadelijk is. Om<br />
dit te voorkomen is het noodzakelijk om geregeld de leidingen te controleren op eventuele fouten in het<br />
5 VINCKEN, M., ‘De Emobot’, De Ingenieur, 2002, november, nr. 20, p. 20-27.<br />
6 HANLON M., ‘Epson develops World's Smallest Flying Micro-robot’, internet, 2009-10-25,<br />
(http://www.gizmag.com/go/2373/ entertainment vliegende robot.).<br />
12
materiaal. Inspectie van pijpleidingen kan uitgevoerd worden met behulp van X-stralen. Indien de leiding<br />
bovengronds ligt, is het geen probleem om zulke controles manueel uit te voeren, maar in de meeste<br />
gevallen liggen de leidingen ondergronds. In die gevallen is het niet aan te raden om de leidingen telkens<br />
terug bloot te leggen voor inspectie. De oplossing voor dit probleem is het ontwikkelen van een robot met<br />
een diameter die equivalent is aan die van de buis, waarin hij controles moet uitvoeren. De grote van zo’n<br />
robot kan dus variëren van groot tot zeer klein. Aan boord is een minicomputer voorzien die in staat is<br />
data op te slaan over de toestand van de pijplijn en deze data ook door te sturen naar een computer<br />
bovengronds. De drijvende kracht van de robot is eenvoudigweg de stroming van het fluïdum zelf.<br />
Foutenonderzoek op de pijpen wordt vaak uitgevoerd met behulp van magnetische lekflux. Een sterke<br />
magneet of een elektrische stroom veroorzaakt een sterk magnetisch veld. Beschadigde delen van de<br />
wand kunnen niet zoveel magnetische flux opnemen als onbeschadigde delen, op die manier kan men een<br />
onderscheid maken en de fout detecteren. Een andere manier is het gebruik van ultrasone geluiden.<br />
Hierbij genereert de robot een ultrasoon geluid, dat wordt weerkaatst door het buitenste van de pijpwand.<br />
Het tijdsinterval tussen het vertrek en de aankomst van het geluid wordt gemeten en zo bepaalt men de<br />
dikte van de pijpwand.<br />
Bij sommige pijpleidingen wordt er beter gebruik gemaakt van visuele methodes om de conditie ervan te<br />
constateren. Dan opteert men voor een microrobot, die uitgerust is met een infrarood camera 7 .<br />
4.3. Reddingswerken<br />
Figuur 11: Microrobot voor inspecties in pijpleidingen.<br />
Na een aardbeving of een terreuraanslag (9-11), duurt het vaak enkele dagen tot weken, voordat men<br />
iemand terugvindt in het puin. Professor Robin Murphy is ontwikkelaar van microrobots, met de grote<br />
van ongeveer een schoendoos, die specifiek inzetbaar zijn voor “search and rescue” missies.<br />
De robots zijn uitgerust met allerlei technische apparatuur die het mogelijk maken slachtoffers in de<br />
meest hachelijke situaties terug te vinden. Alle robots zijn uitgerust met microfoons om stemmen te<br />
detecteren van mensen die zich onder het puin kunnen bevinden. Sommige zijn uitgerust met thermische<br />
camera’s, die de warmte van lichamen kunnen detecteren. Robots onder de vorm van een minitank zijn<br />
het best inzetbaar. Ze worden met behulp van een joystick bestuurd en zijn in staat door moeilijke gangen<br />
van puin te kruipen, tot wel 10 meter diep 8 .<br />
Figuur 12: Microrobot in de vorm van een minitank<br />
7 ‘Pipeline inspection’, internet, 2009-10-25, (http://www.ndted.org/AboutNDT/SelectedApplications/PipelineInspection/PipelineInspection.htm).<br />
8 BIJAL P. TRIVEDI, ‘Search and rescue robots tested at New York disaster site.’, internet, 2009-10-25,<br />
(http://news.nationalgeographic.com/news/2001/09/0914_TVdisasterrobot.html).<br />
13
4.4. Geneeskunde<br />
In de recentste vooruitgang van de geneeskunde spelen microrobots eveneens een rol en dan<br />
hoofdzakelijk in de chirurgie. Microrobots hebben zich in de loop der jaren verder ontwikkeld om<br />
tegemoet te komen aan de stijgende eisen van de heelkunde. In de jaren ‘90 werd er reeds onderzoek<br />
verricht naar het gebruik van microrobots in het menselijk lichaam. Er werden microrobots in capsules<br />
geplaatst en ingeslikt patiënt 9 . Zo kon men onderzoek verrichten naar het spijsverteringsstelsel.<br />
Tegenwoordig wordt er onderzoek gedaan naar microrobots die zich in onze bloedvaten zouden kunnen<br />
voortbewegen 10 . Van deze robots wordt verwacht dat ze vele mogelijkheden zullen bieden voor de<br />
geneeskunde. Ze zouden een alternatief bieden voor kijkoperaties en instaan voor het begeleiden van<br />
katheters (bv inwendige bestraling bij kankerbestrijding) en medicijnen.<br />
Figuur 13: Microrobot die door onze aders kan zwemmen<br />
Australische wetenschappers hebben onlangs een microrobot voorgesteld die zich in onze bloedbaan kan<br />
voortbewegen 11 . De robot is slechts 0.25 mm breed en beweegt zich voort met een flagellum. Hij wordt<br />
aangedreven door ultrasone geluidsgolven, die een druk uitoefenen op de motor. Het ingebouwd piëzoelektrisch<br />
element genereert stroom zodra er een druk op wordt uitgeoefend en voedt zo het flagellum.<br />
Bradley Nelson, doctor in de wetenschappen, gelooft dat microrobots een belangrijke rol kunnen spelen<br />
in de oogchirurgie 12 . Daar waar de gewone operaties langdurig en omslachtig zijn, kan een van buitenaf<br />
bestuurde robot op een veel efficiëntere manier beschadigingen herstellen, meent hij. Dr. Nelson is dan<br />
ook begonnen met het construeren van een microrobot, die klein genoeg is om te worden ingebracht met<br />
een naald en die zich kan voortbewegen aan de hand van magnetische velden.<br />
Figuur 14: Microrobot gebruikt bij oogchirurgie<br />
Microrobots vinden ook hun toepassing in onderzoek naar de celstructuur. Ze kunnen, door het aanleggen<br />
van een magnetisch veld, cellen scheiden en door een cel bloot te stellen aan magnetische golven is het<br />
mogelijk de reactie van het DNA hierop te analyseren.<br />
9<br />
internet, 24-10-2009, (‘http://jnrr07.u-strasbg.fr/actes/articles/5.pdf’).<br />
10<br />
MOHAMED GAD-EL-HAK, The MEMS handbook: ‘MEMS Applications’, CRC Press, Taylor and Francis Group (2006)<br />
p7-5.<br />
11<br />
Internet, 24-10-2009,(http://www.kennislink.nl/publicaties/robot-zwemt-door-de-bloedbaan).<br />
12<br />
Internet, 24-10-2009, (http://biopharminternational.findpharma.com/biopharm/article/articleDetail.jsp?id=360857).<br />
14
4.5. Beveiliging<br />
Binnen enkele jaren zullen microrobots niet meer weg te denken zijn uit onze eigen woning. Daar zullen<br />
ze vooral hun toepassing hebben in de beveiliging van onze woonst. Kruipende, rollende en zelfs<br />
vliegende robots kunnen onze bezittingen bewaken en ons waarschuwen bij inbraken 13 .<br />
Twintig jaar geleden startte een laboratorium met creëren van microrobots in de vorm van insecten 14 . Hun<br />
uiteindelijk doel was om een robot in de vorm van een krekel te ontwerpen. Deze zou dan beschikken<br />
over het vermogen om te kruipen en te springen, om zich zo te kunnen voortbewegen over oneffen terrein<br />
en obstakels. De zespotige robot, met de grootte van een krekel, zou de mogelijkheid hebben om ongezien<br />
vijandelijk terrein te verkennen of gewoon het huis van zijn eigenaar te bewaken.<br />
Het idee om een robot een huis te laten bewaken bestaat dus al langer 15 . Een robot die zowel kan<br />
waarschuwen bij brand als bij diefstal, die een camera met zich meedraagt en zich tussendoor ook nog<br />
nuttig maakt als vuilbak, het lijkt toekomstmuziek 16 .<br />
Onlangs echter hebben twee Japanse bedrijven de ‘Roborior’ voorgesteld. Deze robot is uitgerust met een<br />
sensor om mogelijke indringers op te sporen. Bij inbraak gaat er automatisch een alarm af en wordt een<br />
vooraf ingeprogrammeerd nummer opgebeld.<br />
De robot is ook van buitenshuis bestuurbaar met een GSM en kan zelfs een signaal sturen naar de tv, die<br />
dan dienst doet als bewakingsmonitor.<br />
Buiten zijn surveillancetaken kan deze robot tevens ook dienst doen als LED-verlichting<br />
Figuur 15: De Roborior.<br />
13 Internet, 24-10-2009, (http://www.sciencedaily.com/releases/2009/04/090413205339.htm).<br />
14 Internet, 24-10-2009, (http://biorobots.cwru.edu/publications/ICRA00_Birch_Cricket.pdf).<br />
15 Internet, 24-10-2009, (http://foe.mmu.edu.my/NS-MMU/ns_past_competitions_projects_descriptions.html).<br />
16 Internet, 24-10-2009, (http://www.techjapan.com/Article736.html).<br />
15
Praktisch gedeelte 17<br />
1. Onderzoek<br />
Johan Vennekens en Jona Gladines<br />
De uitwerking van dit wetenschappelijk project ging van start met de kennismaking met onze begeleider<br />
‘Toon Goedemé’. Hij gaf ons meteen het onderstel waarmee we het robotje moesten maken. Vervolgens<br />
verschafte hij ons ook de eerste uitleg over het project en de verwezenlijkingen van vorige groepen. Het<br />
robotje bleek een rupsvoertuig te zijn waarbij beide rupsbanden steeds in beweging zijn of stilstaan. Het<br />
kan dus niet draaien door slechts één rupsband te laten bewegen, maar door de rupsbanden in<br />
tegenovergestelde richting te laten rijden. Er werd ook voorgesteld om een FPGA te gebruiken in<br />
combinatie met microswitches, toch kregen we de vrije keuze voor de uitwerking. Een eerste probleem,<br />
waar we in aanraking mee kwamen, was dat de motoren genoeg stroom moesten krijgen. Een logisch<br />
bordje zou nooit de benodigde stroom kunnen leveren, daarom hadden we een motoraansturing nodig.<br />
Gelukkig was deze aansturing reeds een jaar geleden samengesteld door de vorige groep.<br />
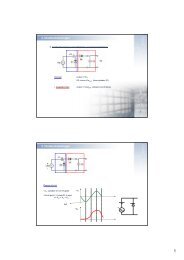
Figuur 16: Motoraansturing.<br />
Door aan de pinnen enable, motor 1 en motor 2 een digitale 1 of 0 toe te wijzen, kunnen we de toestand<br />
van de motoren wijzigen. Enable beheert de voeding van de motoren. De variabelen voor motor 1 en 2<br />
geven de richting van de motor aan. Een voedingsspanning van 5V is vereist voor de logische schakeling<br />
op de motoraansturing, maar de motoren hebben echter +2,5V en -2,5V nodig. Door vier batterijen van<br />
1,5V te gebruiken in combinatie met enkele germaniumdiodes, verkrijgen we dus de juiste spanningen<br />
wanneer we een virtuele grond aanleggen tussen de batterijen.<br />
Figuur 17: Spanningsbron voor de robot.<br />
17 Internet, 28-11-2009, (http://www.arduino.cc/en/Main/ArduinoBoardDuemilanove),<br />
(http://cdn.shopify.com/s/files/1/0031/5472/products/08959_03_l_large.jpg).<br />
16
Nu de motoraansturing functioneerde, moest er nog een manier gevonden worden om de signalen naar de<br />
ingangspoort te sturen. Van onze begeleider kregen we een Xilinx-bordje ter beschikking met FPGA op.<br />
Deze gebruikte tijdsblokken om bepaalde acties uit te voeren.<br />
Aangezien we veel tijd zouden verliezen met het aanleren van de nieuwe programmeermethodes, werd er<br />
beslist om Jona’s Arduino-bordje te gebruiken. Het grote voordeel van dit bordje is dat we hiermee<br />
kunnen programmeren door gebruik te maken van een variant van de programmeertaal “C”. Enkele<br />
andere voordelen zijn snelheid en 6 analoge ingangspoorten. De microcontroller werkt op 16MHz, wat<br />
veel sneller is dan de FPGA en bevat een Analoog-digitaalconverter (ADC), die dus een analoge<br />
voedingsspanning tussen 0 en 5V omzet in een digitaal getal van 10 bits. Het grote voordeel van dit<br />
bordje is dat het via een USB-poort programmeerbaar is, door gebruik te maken van een variant van de<br />
programmeertaal “C”.<br />
Figuur 18: Arduino Duemilanove bordje.<br />
Een laatste grote component van onze robot zijn de sensoren. Vorige jaren gebruikte men steeds<br />
microswitches als input. Deze sensoren hebben als nadeel dat ze geen actuele informatie geven over de<br />
afstand tot de muur, maar ze geven pas een signaal wanneer de robot de muur raakt. De robot kan dus<br />
mogelijk gehinderd worden. Om dit te vermijden, hebben we andere sensoren nodig, die geen fysiek<br />
contact maken met de muur van het doolhof.<br />
In eerste instantie hebben we getracht onze eigen sensoren te ontwikkelen op basis van infrarood-straling.<br />
Deze bleken echter te kleurafhankelijk, waardoor we toch besloten over te gaan tot de aankoop van<br />
“SHARP”-sensoren. (De elektronische schakeling van onze eigen sensor vind u hieronder.)<br />
Figuur 19: Elektronische schakeling eigen sensor.<br />
De “SHARP”-sensoren werken op basis van infrarood-straling maar gebruiken driehoeksmeetkunde voor<br />
hun afstandsbepaling. Zij geven ook een variërende spanning uit naargelang de afstand.<br />
Figuur 20: “SHARP” Proximity sensor.<br />
17
Na de keuze van de sensoren, konden we starten met de opbouw van het besturingsprogramma van de<br />
robot.<br />
Het programma bestaat uit 3 grote delen: de declaratie, de controle en de uitvoering.<br />
In de declaratie worden al de gebruikte variabelen en poorten benoemd, dit heet declareren.<br />
Het tweede deel, de controle, is het eigenlijke programma. Het begint met een oneindige while-lus,<br />
waarbij alles wat zich in deze lus bevindt, steeds herhaald wordt. Hierin plaatsen we de code voor het<br />
controleren van de sensoren met behulp van vier verschillende if-functies.<br />
De eerste twee controleren of de afstand van de voorste sensor tot de muur kleiner is dan zes centimeter.<br />
Daarna controleert de robot of er zich links of rechts een muur bevindt.<br />
Hij doet dit door de opgemeten waarde van de rechtse sensor met die van de linkse te vergelijken. Hoe<br />
groter deze waarde, hoe kleiner de afstand tot het object. Dus de sensor, die de grootste waarde<br />
teruggeeft, staat het dichtst tegen de muur. De derde controleert of de rechtse sensor een te grote waarde<br />
teruggeeft. De laatste if-functie doet hetzelfde als de vorige, maar dan voor de linkse sensor.<br />
In elk van deze if-functies wordt verwezen naar het derde onderdeel van het programma, dat instaat voor<br />
het draaien van de robot in de juiste richting.<br />
2. Testen<br />
Toen we over alle benodigde componenten van de robot beschikten, moesten we deze gaan testen. Door<br />
een stukje code, dat ervoor zorgt dat een sensorwaarde wordt doorgestuurd naar de computer, op<br />
“Arduino” te zetten, konden we het uitgangssignaal bestuderen. Door vervolgens materialen van<br />
verschillende kleur steeds op dezelfde afstand van de sensor te positioneren, konden we de<br />
kleurafhankelijkheid bepalen. De sensoren bleken goed te functioneren en waren bijna<br />
kleuronafhankelijk. De voeding van de sensoren werd parallel geschakeld, omdat ze elk 5 volt vereisen,<br />
en er zich slechts één 5 volt poort bevindt op het “Arduino”-bordje. De signalen werden naar de analoge<br />
ingangen 1, 2 en 3 geleid.<br />
Figuur 21: Schema robot.<br />
Eveneens werd de motoraansturing in deze fase getest. Toen ook deze volledig bleek te werken, werd<br />
alles in zijn geheel getest. Zo ontdekten we nog enkele laatste bugs in ons programma. Deze werden er<br />
met succes uitgefilterd. De robot zou nu perfect moeten werken.<br />
Het onderstel van de robot is niet bijzonder krachtig. Alle componenten, die we er aan toevoegen, mogen<br />
bijgevolg niet te veel wegen. Maquettekarton werd gekozen als materiaal voor de opbouw van de robot,<br />
omdat het zeer licht en stevig is. Balsahout was ook een optie, maar dit materiaal is vele malen duurder.<br />
Ons ontwerp is vrij simpel, een vierkantig doosje waar alle componenten in passen. Het robotje doet<br />
perfect zijn werk, maar een defect aan de tandwieltjes van het onderstel weerhield het ervan het einde van<br />
het doolhof te halen.<br />
18
Besluit<br />
Evi Meeus en Thomas Cools<br />
Aan het einde van ons projectwerk kunnen we vaststellen dat microrobots steeds verder geïntegreerd zijn<br />
in ons dagelijks leven. Zelfs daar waar we ze niet verwachten, duiken ze op, in alle soorten en maten.<br />
Ze bieden ons een kans om verrichtingen uit te voeren, daar waar veel te omvangrijke en vaak verouderde<br />
technieken ons in de steek laten of gewoon om de gebruikelijke klusjes in en rond het huis op te knappen.<br />
Kortom microrobots nemen stilaan een plaats in in ons alledaagse leven en zullen binnenkort bijna niet<br />
meer weg te denken zijn uit ieders huiskamer.<br />
De praktische uitvoering, namelijk het zelf maken van een autonome microrobot, zorgde al van bij de<br />
start van ons project voor de nodige motivatie. We begonnen dan ook enthousiast aan onze uitdieping<br />
over microrobots, sensoren en andere componenten. Ondanks ons enthousiasme, waren er vaak ook<br />
momenten waarop we rustig ons inzicht moesten gebruiken om de beste keuze te kunnen maken of om de<br />
juiste oplossingen te vinden voor de problemen waar we mee geconfronteerd werden.<br />
Het zwakke onderstel vormde hierbij een grote uitdaging, die we met plezier aangingen. Zo kozen we<br />
bewust voor maquettekarton als constructiemateriaal, omdat dit zo licht is en dus voor een minimale<br />
belasting zou zorgen. Jammer genoeg heeft onze robot, ondanks de beperkte belasting, het einde van het<br />
doolhof niet gehaald door een defect aan de tandwieltjes.<br />
Gedurende dit project werden we geconfronteerd met de vele uiteenlopende facetten van een projectwerk.<br />
De literatuurstudie, de praktische uitvoering en het werken in groep waren een leerrijke ervaring.<br />
Het voorbereidende opzoekwerk, dat leidde tot deze paper, gaf ons inzicht in de verscheidene<br />
mogelijkheden van navigatie en toepassingen van sensoren. Dit stelde ons in staat zelf te kiezen voor de<br />
juiste sensoren, programmatie en navigatie voor het samenstellen van een autonome microrobot.<br />
Het was een interessante ervaring samen te werken met vier verschillende personen, ieder gekenmerkt<br />
door een geheel eigen karakter, zijn talenten en gebreken.<br />
We hebben elkaars kwaliteiten leren waarderen, eensgezind leren samenwerken en samen streven naar<br />
een gemeenschappelijk doel.<br />
Figuur 22: Ons eindresultaat<br />
19
Bijlagen<br />
1. Bronnen van figuren<br />
• Figuur 1: Door Jona Gladines<br />
• Figuur 2: http://www.acroname.com/robotics/info/articles/sharp/sharp.html.<br />
• Figuur 3: Door Jona Gladines<br />
• Figuur 4: Door Jona Gladines<br />
• Figuur 5: Door Jona Gladines<br />
• Figuur 6: Door Jona Gladines<br />
• Figuur 7: Door Jona Gladines<br />
• Figuur 8: Door Jona Gladines<br />
• Figuur 9: Door Jona Gladines<br />
• Figuur 10: http://www.gizmag.com/go/2373/ entertainment vliegende robot.<br />
• Figuur 11: http://www.ndt-ed.org/AboutNDT/SelectedApplications/<br />
PipelineInspection/PipelineInspection.htm<br />
• Figuur 12: http://www.newscientist.com/article/dn11301-search-and-rescue-robots-team-up-fortricky-tasks.html<br />
• Figuur 13: http://www.kennislink.nl/publicaties/robot-zwemt-door-de-bloedbaan.<br />
• Figuur 14: http://biopharminternational.findpharm.com/biopharm/article/articleDetail.jsp?id=368<br />
57.<br />
• Figuur 15: http://www.techjapan.com/Article736.html<br />
• Figuur 16: Door Jona Gladines<br />
• Figuur 17: Door Jona Gladines<br />
• Figuur 18: Internet, 28-11-2009, (http://www.arduino.cc/en/Main/ArduinoBoardDuemilanove),<br />
(http://cdn.shopify.com/s/files/1/0031/5472/products/08959_03_l_large.jpg).<br />
• Figuur 19: Door Jona Gladines<br />
• Figuur 20: Door Jona Gladines<br />
• Figuur 21: Door Jona Gladines<br />
20
• Figuur 22: Door Thomas Cools<br />
2. Bronnen<br />
• BIJAL P. TRIVEDI, ‘Search and rescue robots tested at New York disaster site.’, internet, 2009-<br />
10-25, (http://news.nationalgeographic.com/news/2001/09/0914_TVdisasterrobot.html).<br />
• HANLON M., ‘Epson develops World's Smallest Flying Micro-robot’, internet, 2009-10-25,<br />
(http://www.gizmag.com/go/2373/ entertainment vliegende robot.).<br />
• Internet, 5-10-2009, (http://www.site.uottawa.ca/~petriu/CEG4392-IntroRobotics-Sensors.pdf).<br />
• Internet, 5-10-2009, (http://www.sensorland.com/).<br />
• Internet, 24-10-2009, (‘http://jnrr07.u-strasbg.fr/actes/articles/5.pdf’).<br />
• Internet, 24-10-2009,(http://www.kennislink.nl/publicaties/robot-zwemt-door-de-bloedbaan).<br />
• Internet, 24-10-2009,<br />
(http://biopharminternational.findpharma.com/biopharm/article/articleDetail.jsp?id=360857).<br />
• Internet, 24-10-2009, (http://www.sciencedaily.com/releases/2009/04/090413205339.htm).<br />
• Internet, 24-10-2009, (http://biorobots.cwru.edu/publications/ICRA00_Birch_Cricket.pdf).<br />
• Internet, 24-10-2009, (http://foe.mmu.edu.my/NS-<br />
MMU/ns_past_competitions_projects_descriptions.html).<br />
• Internet, 24-10-2009, (http://www.techjapan.com/Article736.html).<br />
• MOHAMED GAD-EL-HAK, The MEMS handbook: ‘MEMS Applications’, CRC Press, Taylor<br />
and Francis Group (2006) p7-5.<br />
• ‘Pipeline inspection’, internet, 2009-10-25, (http://www.ndted.org/AboutNDT/SelectedApplications/PipelineInspection/PipelineInspection.htm).<br />
• Internet, 28-11-2009, (http://www.arduino.cc/en/Main/ArduinoBoardDuemilanove),<br />
(http://cdn.shopify.com/s/files/1/0031/5472/products/08959_03_l_large.jpg).<br />
21