

71 3. SUDĖTINIS TAŠKO JUDĖJIMAS 3.1. Reliatyvusis, keliamasis ...
71 3. SUDĖTINIS TAŠKO JUDĖJIMAS 3.1. Reliatyvusis, keliamasis ...
71 3. SUDĖTINIS TAŠKO JUDĖJIMAS 3.1. Reliatyvusis, keliamasis ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
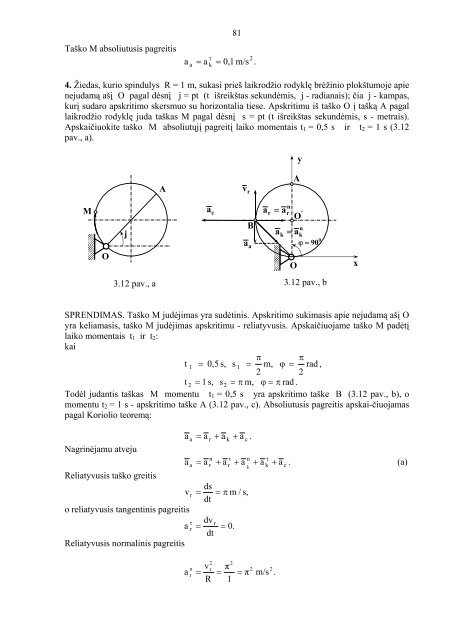
Taško M absoliutusis pagreitis<br />
a<br />
a<br />
= a =<br />
τ<br />
k<br />
0,<br />
1<br />
81<br />
m/s<br />
4. Žiedas, kurio spindulys R = 1 m, sukasi prieš laikrodžio rodyklę brėžinio plokštumoje apie<br />
nejudamą ašį O pagal dėsnį j = pt (t išreikštas sekundėmis, j - radianais); čia j - kampas,<br />
kurį sudaro apskritimo skersmuo su horizontalia tiese. Apskritimu iš taško O į tašką A pagal<br />
laikrodžio rodyklę juda taškas M pagal dėsnį s = pt (t išreikštas sekundėmis, s - metrais).<br />
Apskaičiuokite taško M absoliutųjį pagreitį laiko momentais t1 = 0,5 s ir t2 = 1 s (<strong>3.</strong>12<br />
pav., a).<br />
M<br />
O<br />
j<br />
<strong>3.</strong>12 pav., a<br />
A<br />
a c<br />
v r<br />
2<br />
B<br />
a a<br />
.<br />
a = a<br />
r<br />
A<br />
n<br />
r<br />
O '<br />
n<br />
k<br />
a k = a<br />
ϕ = 90 0<br />
O<br />
y<br />
<strong>3.</strong>12 pav., b<br />
SPRENDIMAS. Taško M judėjimas yra sudėtinis. Apskritimo sukimasis apie nejudamą ašį O<br />
yra <strong>keliamasis</strong>, taško M judėjimas apskritimu - reliatyvusis. Apskaičiuojame taško M padėtį<br />
laiko momentais t1 ir t2:<br />
kai<br />
π π<br />
t 1 = 0,<br />
5 s, s 1 = m, ϕ = rad ,<br />
2 2<br />
t 2 = 1 s, s2<br />
= π m, ϕ = π rad .<br />
Todėl judantis taškas M momentu t1 = 0,5 s yra apskritimo taške B (<strong>3.</strong>12 pav., b), o<br />
momentu t2 = 1 s - apskritimo taške A (<strong>3.</strong>12 pav., c). Absoliutusis pagreitis apskai-čiuojamas<br />
pagal Koriolio teoremą:<br />
Nagrinėjamu atveju<br />
<strong>Reliatyvusis</strong> taško greitis<br />
o reliatyvusis tangentinis pagreitis<br />
<strong>Reliatyvusis</strong> normalinis pagreitis<br />
a = a + a + a .<br />
a<br />
a<br />
a<br />
v r<br />
a<br />
a<br />
τ<br />
r<br />
n<br />
r<br />
= a<br />
=<br />
r<br />
n<br />
r<br />
ds<br />
dt<br />
dv<br />
=<br />
dt<br />
k<br />
+ a<br />
τ<br />
r<br />
= π m<br />
r<br />
=<br />
0.<br />
c<br />
+ a<br />
n<br />
k<br />
/ s,<br />
2 2<br />
v r π<br />
=<br />
= = π<br />
R 1<br />
2<br />
+ a<br />
τ<br />
k<br />
m/s<br />
+ a<br />
2<br />
.<br />
c<br />
. (a)<br />
x






